一種火星車移動系統的設計與實現
2016-06-22 05:38:06丁亮亮楊曉青
河南科技大學學報(自然科學版) 2016年4期
宗 魏,肖 杰,丁亮亮,楊曉青
(1.上海市空間飛行器機構重點實驗室,上海 201108;2.上海宇航系統工程研究所,上海 201108)
?
一種火星車移動系統的設計與實現
宗魏1,2,肖杰1,2,丁亮亮1,2,楊曉青2
(1.上海市空間飛行器機構重點實驗室,上海 201108;2.上海宇航系統工程研究所,上海 201108)
摘要:針對火星車系統構型、車輪和驅動關節展開了優化設計,建成通過能力較強的新型移動系統。通過單輪臺架試驗和整車性能試驗,驗證了新型火星車移動系統在行進、爬坡、越障和蠕動能力方面均能滿足使用的要求。
關鍵詞:火星車;移動系統;設計與分析
0引言
火星探測一直是世界各國所熱衷研究的航天項目。美國成功登陸火星的三代火星車“索杰娜”、“勇氣號、機遇號”和“好奇號”均采用了六輪搖臂式移動系統,質量分別為11.5 kg、170 kg和899 kg。火星車體積和質量逐漸增大,行走能力和地形適應性也逐漸增強,但同時給運載系統和著陸系統帶來了嚴峻的考驗。美國國家航空航天局突破性地采用“空中吊車”技術,將“好奇號”送上了火星。“好奇號”的大車輪使其在火星表面如履平地,可跨過0.5 m的物體,并且每個車輪配備防滑釘,確保車輛可以在松軟的沙子上行駛[1-5]。中國在探月工程中已經成功使用腿式著陸器,將“玉兔號”月球車送上了月球,開展了月面巡視探測,而更遠距離的火星到達和著陸更具挑戰。本文在中國現有運載能力和著陸技術的基礎上,研究適應火星環境的新型移動系統,開展200 kg左右火星車的新型移動系統的方案優化。主要通過結構構型的優化,增強火星車的行走能力,使之能夠滿足中國火星探測的需求 。
1新型火星車移動系統設計
火星表面地形崎嶇,堆積物大小混雜,不同尺寸巖石遍布,多具棱角狀。而且由于塵暴影響,局部地區承壓性能差。火星車需要具備30°爬坡、350 mm越障以及擺脫沉陷的能力,以適應火星地形環境。
1.1新型火星車移動系統構型設計
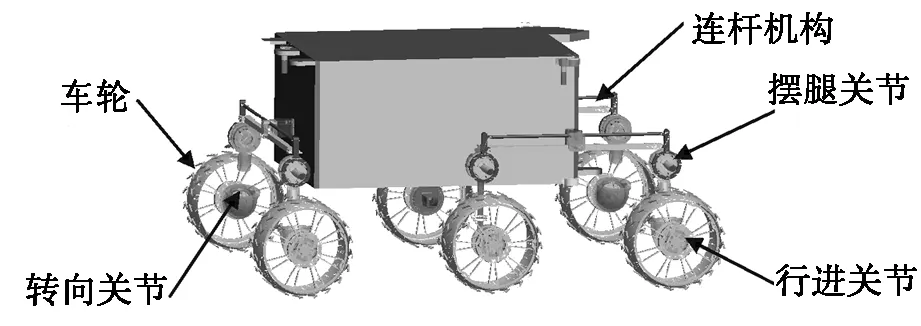
圖1 新型火星車移動系統
新型火星車移動系統由3組相同的模塊化部件組成,每個部件由車輪、連桿機構、行進關節、轉向關節和擺腿關節等組成,如圖1所示。
一體化車輪支撐火星車載荷,驅動機構將動力傳遞到車輪,通過車輪與火星土壤相互作用提供移動的牽引力。行進關節實現車輪的正轉與反轉。轉向關節實現左、右轉向。擺腿關節實現輪系的前擺和后擺,實現移動系統的蠕動功能。連桿機構連接火星車本體與驅動機構,平衡火星車本體姿態。
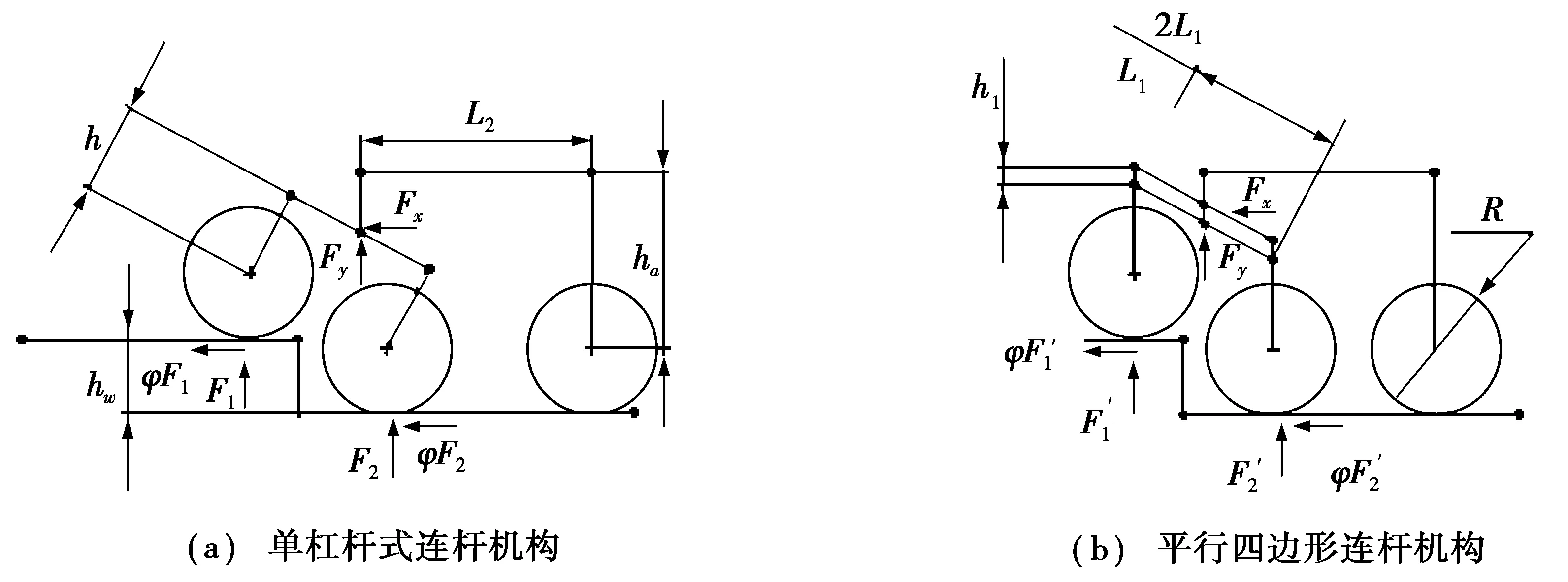
圖2 兩種連桿機構受力分析
1.2車輪設計
以Bekker理論為基礎,結合中國行星探測的需求,初步篩選火星車車輪構型,并通過單輪臺架試驗,評價各車輪的牽引性能[8-9]。
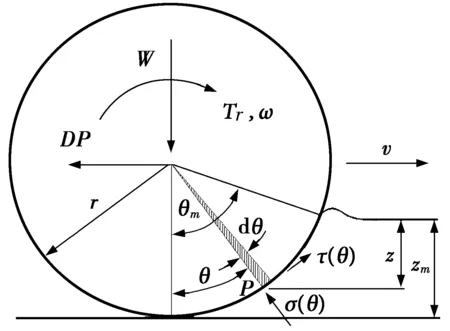
圖3 剛性車輪滾動受力圖
1.2.1車輪與地面作用分析
根據車輛地面力學的理論,剛性車輪底面與土壤接觸區域內任意一點的應力,可分解為法線方向的正應力和切線方向的剪應力,車輪的滾動受力情況如圖3所示。
圖3中,σ(θ)為車輪底面在接觸區域內任一點P受到的正應力,MPa,與地面垂線夾角為θ;τ(θ)為車輪在P點受到的剪應力,MPa;W為施加在車輪上的垂直載荷,N;Tr為車輪驅動轉矩,N·m;DP為車輪受到的掛鉤牽引力,N;ω為車輪滾動角速度,rad/s;v為車輪前進的線速度,m/s;r為車輪半徑,m;θm為車輪漸近角,(°);剛性車輪的離去角很小,這里忽略。
對車輪建立力平衡方程,有如下關系式[8-10]:

(1)

(2)
1.2.2車輪轉矩分析
驅動輪與土壤的相互作用可以分解為接觸面的正應力與剪應力,其中,剪應力與車輪轉矩有關,只有當驅動給予車輪的轉矩不小于剪應力產生的轉矩時,車輪才能轉動。轉矩公式如下[8-9]:
(3)
當剛性車輪有棘爪時,轉矩為:

(4)
其中:Fp為土壤對棘爪的作用力,N;r為車輪半徑,m;b為車輪寬度,m;hb為棘爪高度,m。

Nφ=tan2(45+φ/2),
其中:γs為土壤容重,g/cm3;q為法向壓力,kPa;Nφ為承載因數;c為內聚力,kPa;φ為內摩擦角,(°)。
1.2.3車輪選型
不同種類車輪性能各異。剛性篩網輪質量輕,可避免塵土的堆積存留,轉向阻力小,拖拽阻力小,但沉陷量較大;剛性殼體輪結構簡單可靠,地形適應性強,但易堆積塵土;彈性篩網輪減振性能和行駛性能好,適合高速行駛,但軸向剛度差,質量大,結構復雜。
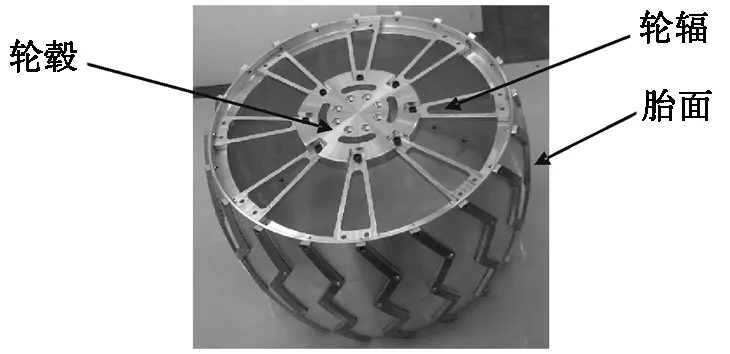
圖4 剛性殼體輪
對不同車輪結構特點分析比較,從火星環境適應性、結構布局需求和可靠性方面考慮,結合火星車低速行駛和輕量化設計的需求,適合火星車車輪結構方案的是剛性殼體輪,如圖4所示。車輪主要由輪輻、輪轂和胎面組成。
1.2.4臺架試驗
測試車輪在不同參數(滑轉率、軸向載荷等)下的行駛性能,得到車輪行駛能力與不同運動參數的關系[10-12]。火星車車輪在7 kg和20 kg載荷條件下,臺架試驗的結果見表1和表2,車輪性能滿足行駛要求。
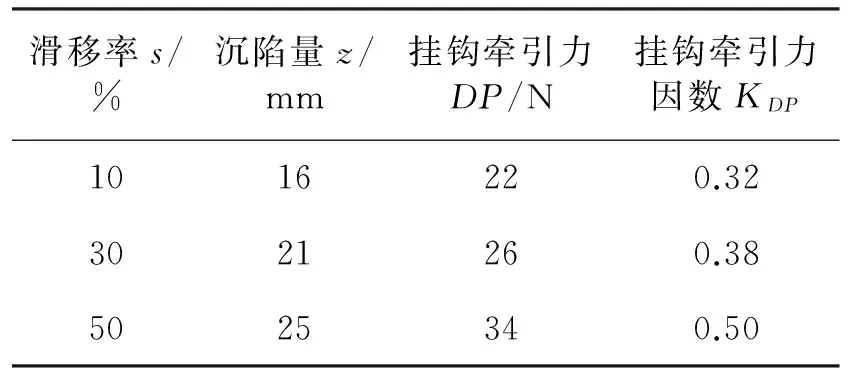
表1 7 kg載荷車輪臺架試驗結果
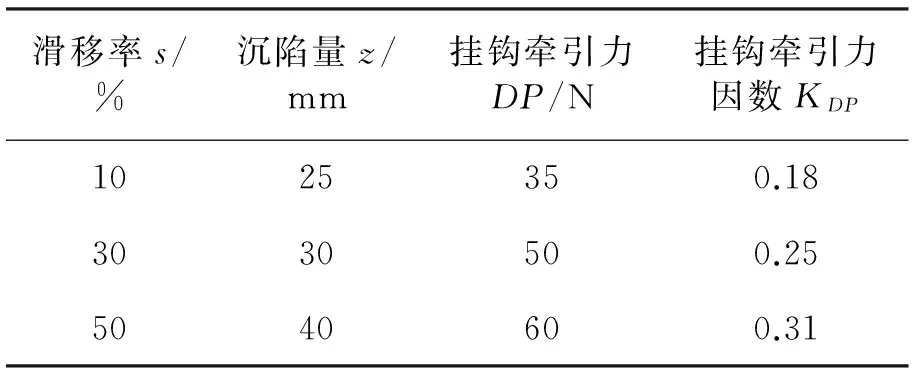
表2 20 kg載荷車輪臺架試驗結果
1.3驅動機構設計

圖5 驅動機構關節樣機
國外成功開展行星探測的星球車輪系統驅動關節主要有3種形式:(Ⅰ)電機連接多級行星減速器。由于行星減速器環境適應性寬、潤滑方便、簡單可靠和效率高,早在“月球車-1”、“月球車-2”中就已經采用。(Ⅱ)電機連接諧波減速器。諧波減速器傳動比高,傳遞扭矩大,能夠有效地減輕質量,此方案在“阿波羅”系列中使用。(Ⅲ)電機連接行星減速器以及諧波減速器。此方案能夠實現大的減速比,對電機扭矩需求小,美國“勇氣號”和“機遇號”均使用此方案。
2試驗驗證

圖6 火星車移動系統性能試驗現場
火星車移動系統性能試驗[14-18],主要工況包括:30°爬坡試驗、350 mm越障試驗和蠕動步態試驗。試驗現場如圖6所示。
2.130°爬坡試驗
在模擬火星環境試驗場設置30°的坡度,測試移動系統能否完成此坡度的爬行功能。測試速度為13.8 mm/s,每個車輪的最大電流如表3所示。

表3 30°爬坡試驗數據
爬坡時,轉向關節與擺腿關節處于制動狀態,6個行進關節電流最大值為0.55 A,遠小于電流閾值(1 A),表明火星車30°爬坡時仍具有較大能力余量,可滿足火星著陸區域地形要求。
2.2350 mm越障試驗
設置障礙高度為350 mm,驗證火星車的越障能力。測試速度為13.8 mm/s,每個車輪的最大電流如表4所示。

表4 350 mm雙邊越障試驗數據
越障時,轉向關節與擺腿關節處于制動狀態,6個行進關節電流最大值為0.61 A,小于電流閾值(1 A),表明火星車具有足夠的越障能力,可越過高度為350 mm的石塊,在著陸區域內安全行走。
2.3蠕動步態試驗
火星車擺腿關節結合行進關節可實現蠕動步態,用于軟土沉陷時的脫困,按照如圖7所示的前輪擺動-中輪擺動-后輪擺動的時序進行步態試驗,單個時序循環移動系統從初始狀態前移距離s。測試行進速度為0.4 mm/s,設置擺腿關節的速度為0.5°/s,每個車輪的最大電流如表5所示。

圖7 蠕動步態試驗圖

試驗參數左前行進右前行進左中行進右中行進左后行進右后行進左前擺腿右前擺腿左中擺腿右中擺腿左后擺腿右后擺腿最大電流/A0.380.370.410.420.390.370.450.480.430.380.420.47行進v/(mm/s)0.390.410.490.420.430.37擺腿v/(°/s)0.520.460.530.410.470.42
行進車輪最大電流為0.42 A,擺腿車輪最大電流為0.48 A,小于電流閾值(1 A),因此,當遇到火星松軟路面沉陷時,火星車可通過蠕動步態脫困。
火星車在30°爬坡試驗、350 mm越障性能試驗和蠕動步態試驗過程中,各項參數均滿足設計指標要求。
3結束語
本文研究了一種新型的火星車移動系統,具有前進、轉向和蠕動等功能。在中國現有的月球車基礎上,增加了蠕動功能,具備了更強的越障能力。火星車懸架的四邊形結構,增強了火星車整體的穩定性,提高了地面通過性能。通過臺架試驗和整車試驗,驗證了行進、爬坡、越障和蠕動等能力能夠滿足火星車的需求。
參考文獻:
[1]GUAN X,WANG X,ASTRONAUTICS S O,et al.A design of autonomous navigation scheme based on vision for the Mars rovers[J].Aero weaponry,2015(1):23-27.
[2]東方星.2014年回顧世界空間探測[J].國際太空,2015(2):32-41.
[3]SQUYRES S.登陸火星[M].王斌,譯.北京:中國宇航出版社,2008:254-286.
[4]GROTZINGER J P.Analysis of surface materials by the curiosity Mars rover[J].Science,2013,341(6153):1475.
[5]ALEXANDRA W.NASA plans Mars sample-return rover[J].Nature,2014,509(7500):272.
[6]黃衛東,鮑勁松.月球車坡路行駛地面力學模型與運動性能分析[J].機械工程學報,2013(5):17-23.
[7]李春書,崔根群.基于車輛地面力學的輪式移動機器人力學模型及分析[J].河北工業大學學報,2015(4):48-52.
[8]龔曉南.高等土力學[M].杭州:浙江大學出版社,1996.
[9]張克健.車輛地面力學[M].北京:國防工業出版社,2002.
[10]LI Y W,LI J Q,ZOU M,et al.Simulation of traction ability of lunar rover with different mechanics of lunar soil[J].Transacions of the CSAE,2009,40(1):1-4.
[11]SENATORE C.Off-road tire modeling and the multi-pass effect for vehicle dynamics[J].Journal of terramechanics,2011,48(4):265(12).
[12]LI J Q,ZOU M,JIA Y,et al.Research on the interaction between lunar rover wheel and lunar soil by simulation[J].Transacions of the CSAE,2008,39(4):1-4.
[13]董曉,陳東照.轎車輪轂軸承疲勞壽命的計算與分析[J].河南科技大學學報(自然科學版),2014,35(5):19-23.
[14]BROOKS C,IAGNEMMA K,DUBOWSKY S.Visual wheel sinkage measurement for planetary rover mobility characterization[J].Autonomous robots,2006,21(1):55-64.
[15]ZHAO Z J,ZOU M,ZHANG R R,et al.Preliminary tests and mechanical property test-bed of soil for lunar surface sampler[J].Transacions of the CSAE,2013,44(s1):288-291.
[16]丁亮亮,肖杰,宗魏,等.與沉陷相關聯的星球車掛鉤牽引力模型研究[J].農業機械學報,2014,45(12):37-42.
[17]宗魏,肖杰,丁亮亮,等.星球車步態規劃與修正[J].上海航天,2016,33(1):33-37.
[18]陳百超,賈陽,王榮本,等.高通過性與平穩性月球車移動系統設計[J].機械工程學報,2008,44(12):143-149.
基金項目:上海市科學技術委員會基金項目(12170700500)
作者簡介:宗魏(1985-),女,江蘇宜興人,工程師,碩士,主要研究方向為星球車系統設計.
收稿日期:2015-12-20
文章編號:1672-6871(2016)04-0015-05
DOI:10.15926/j.cnki.issn1672-6871.2016.04.004
中圖分類號:V19
文獻標志碼:A