拖拉機CAN通信技術研究與試驗
2016-06-22 05:38:06閆祥海周志立徐立友張靜云
河南科技大學學報(自然科學版) 2016年4期
關鍵詞:通信網絡
閆祥海,周志立,徐立友,張靜云
(河南科技大學 車輛與交通工程學院,河南 洛陽 471003)
?
拖拉機CAN通信技術研究與試驗
閆祥海,周志立,徐立友,張靜云
(河南科技大學 車輛與交通工程學院,河南 洛陽 471003)
摘要:針對拖拉機控制實時性低和產品間電氣匹配性差等問題,以拖拉機電控機械式自動變速器(AMT)控制器為例,基于ISO 11783協議對其控制器局域網(CAN)接口硬件電路及應用層通信協議進行了設計,實現了AMT_ECU與發動機ECU的實時數據通信。利用Allegro PCB軟件對控制器信號反射和串擾進行了仿真分析,使用CANcaseXL接口卡將AMT控制器實物接入CAN。利用CANoe軟件建立數據庫、配置虛擬儀表,使用CAPL語言編程,搭建了以拖拉機AMT控制器為真實節點的系統半實物仿真平臺,并對總線系統通信功能和負載率情況進行了監測。測試結果表明:拖拉機AMT控制器CAN接口符合電氣硬件要求,可實現與發動機ECU進行CAN信息的發送與接收。
關鍵詞:拖拉機;農業裝備;通信網絡;半實物仿真
0引言
為了提高中國農機裝備水平,加快農業機械自動化和智能化進程,配備標準化和網絡化的電子裝備變得日益重要。目前,中國農機某些重要部件采用帶有標準網絡接口的進口設備,如何實現與其他國產部件的正常通信成為產品研制的關鍵技術[1-3]。ISO 11783國際標準對農林裝備、拖拉機串行控制及數據通信總線網絡協議進行了明確規范。采用控制器局域網(controller area network,CAN)總線作為農機網絡節點連接的標準總線,對傳感器、控制部件、執行器、信息存儲和顯示單元之間的數據傳輸格式和方法進行了規定,可有效提高農機各項性能,同時壓縮了產品開發周期,降低了開發成本[4-5]。
國外對CAN總線技術在農機上的研究已趨于成熟,凱斯紐荷蘭(CNH)、芬特(Fendt)和約翰迪爾(John Deere)等農機公司生產的產品實現了整車網絡控制及節點信息共享,而CAN總線技術在國產農機上的應用研究目前局限于單個部件,沒有形成網絡布控,缺乏對網絡管理的研究[6-9]。ISO 11783協議的優越性和成熟性在國外已經得到初步體現,設計符合國際標準的產品對中國農機行業的發展具有一定的實用價值。通過解析CAN總線工作原理和ISO 11783協議,本文設計了拖拉機電控機械式自動變速器(automatic mechanical transmission,AMT)控制器CAN接口硬件電路及應用層軟件,以期為拖拉機自動化研究奠定技術基礎。
1拖拉機CAN網絡系統
CAN是一種串行通信網絡,為解決車輛實時控制和繁雜布線等問題提供了有效方案[10]。由于其支持高安全等級的分布式實時控制,CAN總線作為國際標準應用于工業領域[11]。ISO 11783協議對CAN總線在農業機械上應用的高層協議進行了明確規定,詳細定義了總線網絡層與網絡管理、拖拉機電子控制單元(electronic control unit,ECU)規范、農機具信息規范、虛擬終端規范、任務控制器規范以及信息管理系統數據通信規范。協議還顧及到農業機械自身的特點以及與精準農業的鏈接,為實現農業機械的網絡化和智能化提供了平臺。
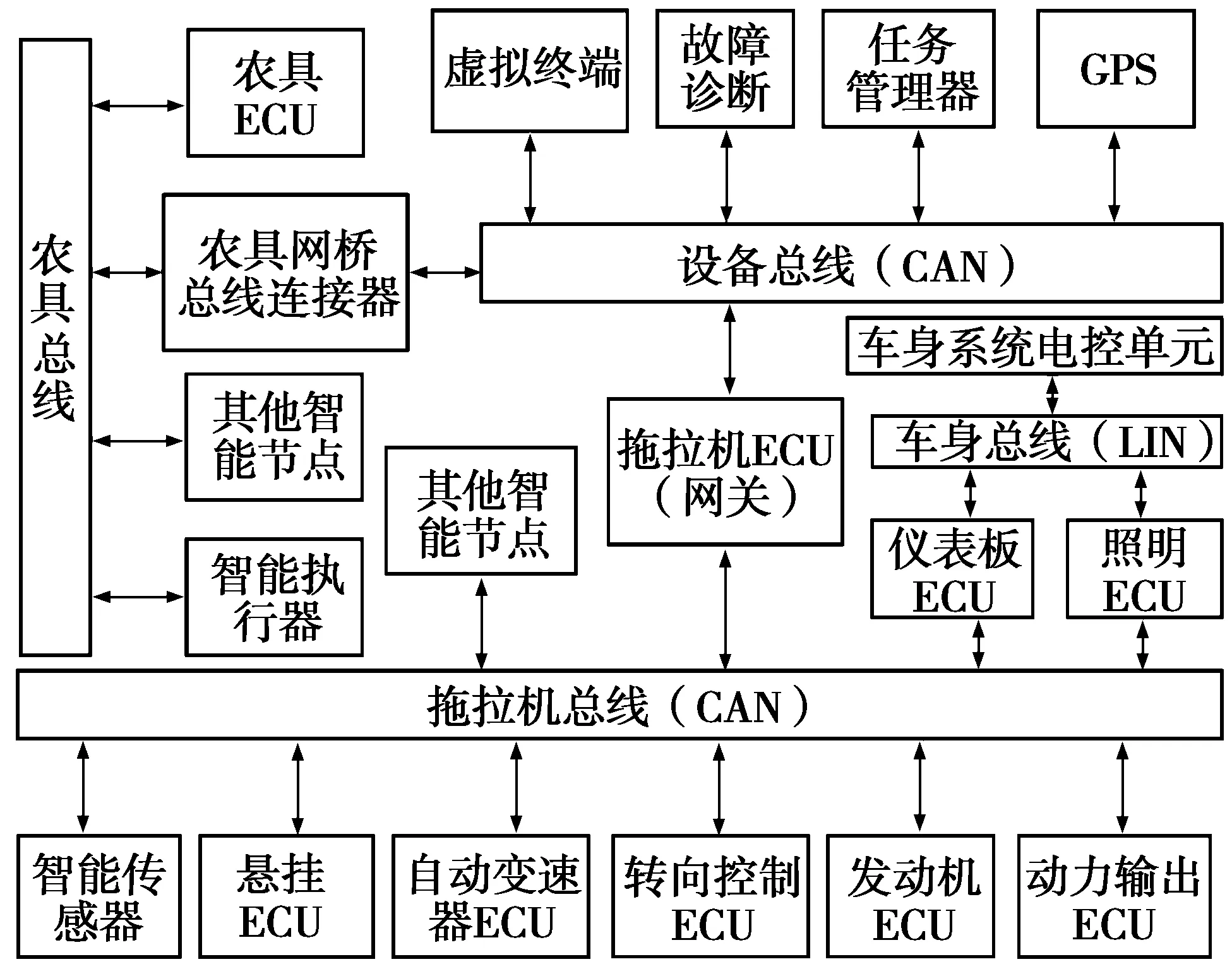
圖1 拖拉機CAN網絡結構圖
拖拉機CAN網絡被ISO 11783協議分成了拖拉機總線與農具總線兩個組成部分,如圖1所示[12-13]。拖拉機總線主要用于牽引控制ECU、發動機ECU和變速器ECU等拖拉機主要部件節點的通信;農具總線用于任務控制器、虛擬終端、農具ECU和管理計算機接口等附件設備節點的通信,兩部分總線通過拖拉機ECU網關連接,完成拖拉機與農具節點之間的通信。
2拖拉機AMT系統CAN接口硬件設計
2.1CAN接口電路設計
接口硬件對整個系統起著支持和承載的關鍵作用,拖拉機系統CAN接口設計,必須滿足網絡系統的數據傳輸協議,方可實現與其他節點的正常通信。基于ISO 11783協議規范的CAN網絡電平特性和物理連接,本文設計了拖拉機AMT系統CAN接口電路,如圖2所示。
TMS320F28335芯片集成有兩個增強型CAN模塊(eCAN,包含eCAN-A和eCAN-B兩個接口),設計中選用eCAN-A接口。SN65HVD230是工作電壓為3.3 V的 CAN收發器,與TMS320C28xTM系列數字信號處理器(digital signal processor,DSP)工作電壓相同,在電源設計方便的同時,可與TMS320C28335中央處理器(central processing unit,CPU)配套使用。CPU與收發器相應引腳相連,進行數據的發送和接收,具體連接方法如圖2所示。
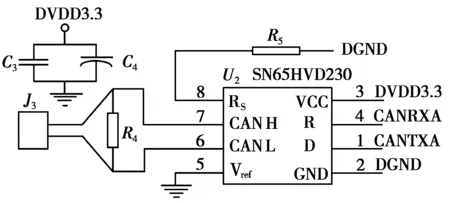
圖2 拖拉機AMT系統CAN接口電路圖
設計中將收發器引腳RS連接一端接地斜率電阻,可有效解決電磁干擾現象,為了消除電路網絡中的中頻和高頻寄生耦合,引腳VCC接3.3 V電壓和容抗分別為0.1 μF和10 μF的退耦電容。將120 Ω的電阻接入CAN H和CAN L導線終端,起到抑制網絡中信號反射的作用。在CPU和收發器之間加裝隔離光耦可增強節點抗干擾能力,但是信號在每個節點都要通過光耦2次,會導致信號延遲。因此,設計中通過增加抗干擾軟件代碼替代了光耦隔離元器件,以提高系統的抗干擾性能。
2.2CAN接口信號完整性分析
在CAN接口電路設計中,考慮到拖拉機AMT控制器工作頻率高和元器件間距小等特性,單憑經驗布線容易出現信號反射和串擾現象,影響系統穩定工作。通過信號完整性分析檢測系統抗干擾能力,可彌補經驗布線的缺失。
阻抗的不連續性會使信號發生反射,設計中使用串聯終端匹配技術,為每個驅動器配備一個電阻來減少系統反射現象的發生。例如,將傳輸線特征阻抗設為50 Ω,則可在CUP和CAN收發器之間設置一個大小為50 Ω左右的匹配阻抗,使匹配電阻功耗最小,信號反射現象減弱,并利用分析工具Allegro PCB對CUP和CAN收發器傳輸線上的信號反射進行仿真。拖拉機AMT控制器采用6層核心板,由于印制電路板(printed circuit board,PCB)層間電介質層的厚度對傳輸線特性阻抗有重要影響,傳輸線阻抗特性的變化會產生不同程度的信號串擾。因此,設計中選取3種電介質厚度對信號串擾進行仿真。反射和串擾仿真波形如圖3和圖4所示。
圖3中,發射端與接收端波形基本吻合,信號的過沖和下沖現象都不嚴重,能夠確保系統穩定運行。圖4中,電介質層厚度d越小,產生的信號串擾越小,因此,核心板的電介質層厚度選為91.44 μm。
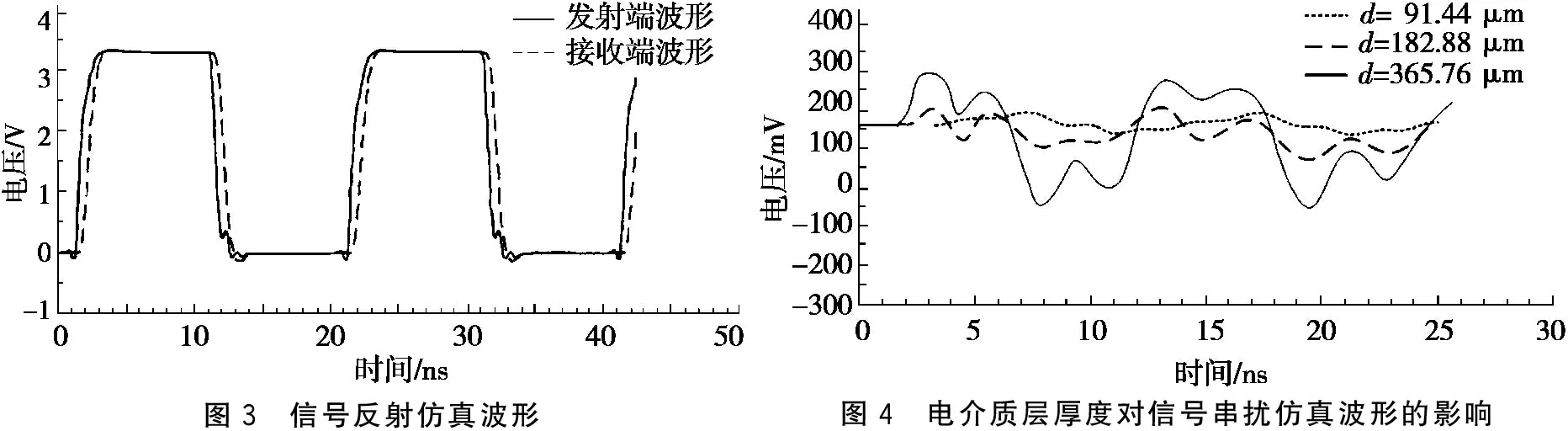
圖3 信號反射仿真波形圖4 電介質層厚度對信號串擾仿真波形的影響
3拖拉機AMT系統CAN接口軟件設計
3.1數據幀的定義
ISO 11783協議將CAN擴展格式數據幀劃分為幀起始、控制場、仲裁場、數據場、應答場、校驗場和幀結尾,對拖拉機及農具ECU通信內容和方式進行了詳細規范。協議第8部分動力傳動系信息以J1939/71為參考進行定義。本文以變速器擋位信息報文為例,對其數據幀仲裁場和數據場進行了定義。
變速器擋位報文是變速器控制器向總線發送的信息,默認優先級為6,數據長度為8字節,協議數據單元格式(PF)為240,數據頁為0。變速器擋位信息報文仲裁場具體數值如表1所示。

表1 變速器擋位信息報文仲裁場數值
注:P.默認優先級;R.保留位;DP.數據頁;PF8-3.PDU格式第8位到第3位;SRR.替代遠程請求位;IDE.識別符擴展位;PF2-1.PDU格式第2位到第1位;PS.特定協議數據單元;SA.源地址。
協議對數據場的每個字節進行了明確定義,表2列出了變速器擋位數據場各個字節的參數含義。

表2 變速器擋位數據場參數
采用同樣的方法可以獲得其余拖拉機及農具網絡節點的報文數據幀,其中,發動機ECU和自動變速器ECU節點數據信息如表3所示。

表3 節點報文數據幀
3.2CAN接口初始化
對位時間配置寄存器進行編程能夠確定總線通信速率,完成CAN模塊的初始化,與通信速率相關的信息如表4所示。

表4 通信速率相關的基本信息
注:BRP為波特率預定標器寄存器值加1。
系統通信速率為500 kb/s,位時間為2 000 ns,SYNC_SEG段為固定的1 TQ,PROP_SEG 取15 TQ,PHASE_SEG1取8 TQ,PHASE_SEG2取6 TQ。
4CANoe半實物仿真測試
Vector公司的CANoe系統為CAN總線的開發提供了集成模型創建、半實物仿真、在線物理仿真、系統分析和測試等功能。本文使用CANcaseXL的Channel1通道,將作為真實節點的拖拉機AMT控制器接入CANoe中,與發動機虛擬節點搭建CAN網絡仿真拓撲結構,經過建立數據庫、配置顯示面板和CAN總線編程語言(CAN access programming language,CAPL)編程完成半實物仿真測試。半實物仿真平臺由計算機、仿真器、AMT控制器和CANcaseXL接口卡組成。拖拉機CAN網絡仿真拓撲結構包含AMT_ECU與Engine_ECU兩個節點,采用ISO 11783標準對報文數據場中部分字節進行了數據設定。
運行半實物仿真平臺,進行系統工作過程監測,可得到所構建網絡的通信信息,結果見表5和表6。
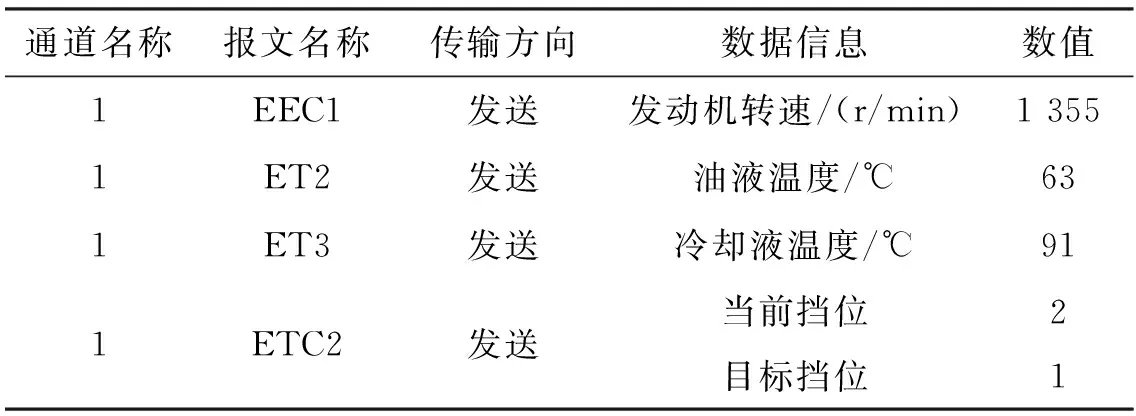
表5 拖拉機CAN通信運行結果
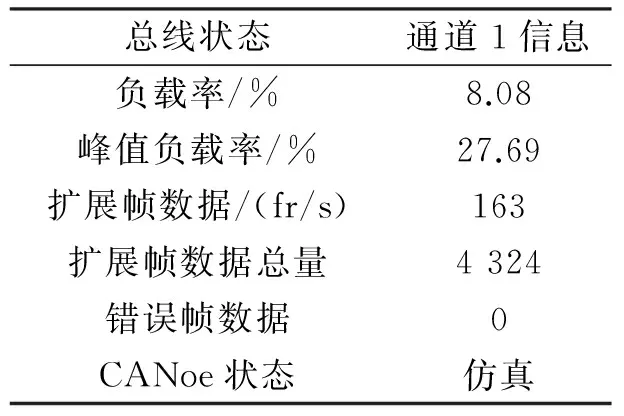
表6 半實物仿真總線狀態
表5顯示了CAN網絡上傳輸的各信號報文信息。從表5中可以看出:發動機ECU節點向總線發送了3條報文,報文EEC1中發動機轉速為1 355 r/min,報文ET2中發動機油液溫度為63 ℃,報文ET3中冷卻液溫度為91 ℃。變速器ECU向總線發送了1條報文,包含變速箱當前擋位與目標擋位兩個參數,表5中所示的當前擋位為2,目標擋位為1,系統完成了拖拉機AMT與發動機之間的通信功能。
從表6所示的半實物仿真總線狀態中可以看出:真實物理節點接入后,總線負載率為8.08%,峰值負載率為27.69%,錯誤幀數據量為0。由于測試中沒有設置抗干擾措施,峰值負載率較高。但總線負載率低于30%,滿足通信的實時性和可靠性要求,達到了總線網絡系統性能設計的目標。
5結束語
本文在分析拖拉機應用CAN總線技術必要性和可行性的基礎上,以拖拉機AMT控制器為例,基于ISO 11783協議對拖拉機AMT系統CAN接口硬件和應用層軟件進行了設計。利用Allegro PCB軟件對控制器信號的反射和串擾現象進行了信號完整性仿真分析,以AMT控制器為真實物理節點構建了CAN網絡半實物仿真平臺,實現了變速器控制器和發動機控制器數據的通信與共享。通過節點開發和系統仿真,為拖拉機控制系統的自動化研究提供了一定的途徑。
參考文獻:
[1]徐立友,周志立,彭巧勵,等.多段式液壓機械無級變速器方案設計與特性研究[J].中國機械工程,2012,23(21):2641-2645.
[2]方樹平,周志立,徐立友.串聯式混合動力拖拉機能量管理策略[J].河南科技大學學報(自然科學版),2015,36(6):61-66.
[3]ZHOU Z L,YAN X H,XU L Y,et al.Hardware design of tractor AMT controller based on DSP[J].JCIT:journal of convergence information technology,2013,8(10):567-574.
[4]Tractors and machinery for agriculture and forestry-serial control and communications data network-part 4:network layer:ISO 11783—4[S].Switzerland:ISO,2006.
[5]XU L Y,YAN X H,ZHOU Z L,et al.Design of CAN interface in tractor AMT control system based on DSP[J].Journal of convergence information technology,2013,8(10):575-582.
[6]周建軍,鄭文剛,李素,等.基于ISO 11783的拖拉機導航控制系統設計與試驗[J].農業機械學報,2010,41(4):184-188.
[7]周志立,夏先文,徐立友,等.電動拖拉機驅動系統設計[J].河南科技大學學報(自然科學版),2015,36(5):78-81.
[8]Tractors and machinery for agriculture and forestry-serial control and communications data network-part 8:power train messages:ISO 11783—8[S].Switzerland:ISO,2006.
[9]GAO C X,ZHANG Z,WANG Y F.The hardware design of switched reluctance drive system based on DSP TMS320LF2407A[J].Journal of convergence information technology,2012,7(15):227-235.
[10]XU L Y,ZHOU Z L,WANG B B.Study on matching strategies of hydro-mechanical continuously variable transmission system of tractor[J].International journal of digital content technology and its applications,2013,7(4):843-849.
[11]趙剡水,楊為民.農業拖拉機技術發展觀察[J].農業機械學報,2010,41(6):42-48.
[12]曹付義,鄧瑞濤,郭廣林,等.雙流傳動的拖拉機轉向工況換段過程[J].河南科技大學學報(自然科學版),2014,35(6):75-79.
[13]YU S Z,XU X D.An input and output monitoring system for FPGA-based hardware PLC[J].International journal of engineering inventions,2012,3(1):34-44.
基金項目:國家自然科學基金項目(51375145);河南省重點科技攻關計劃基金項目(142102210424);河南科技大學青年科學基金項目(2014QN017,2015QN001)
作者簡介:閆祥海(1985-),男,山西晉中人,助教,碩士,主要研究方向為車輛新型傳動理論與控制;周志立(1957-),男,通信作者,河南偃師人,教授,博士,博士生導師,主要研究方向為車輛新型傳動理論與控制.
收稿日期:2016-03-07
文章編號:1672-6871(2016)04-0071-05
DOI:10.15926/j.cnki.issn1672-6871.2016.04.015
中圖分類號:S232.3
文獻標志碼:A
猜你喜歡
卷宗(2016年10期)2017-01-21 15:31:51
大經貿(2016年11期)2017-01-06 13:07:55
中國新通信(2016年21期)2017-01-06 12:06:01
中國新通信(2016年21期)2017-01-06 10:28:25
中國科技博覽(2016年24期)2016-12-28 09:30:25
電子技術與軟件工程(2016年19期)2016-12-19 20:17:07
中國科技博覽(2016年23期)2016-12-09 17:52:00
中國科技博覽(2016年21期)2016-11-14 18:25:40
科技視界(2016年23期)2016-11-04 20:14:00
電腦知識與技術(2016年19期)2016-08-18 20:01:39