半主動連通式油氣懸架精確反饋線性化控制
2016-06-23 03:20:40曹旭陽操林林王殿龍
中國機械工程 2016年4期
曹旭陽 操林林 王殿龍
大連理工大學, 大連, 116024
半主動連通式油氣懸架精確反饋線性化控制
曹旭陽操林林王殿龍
大連理工大學, 大連, 116024
摘要:利用微分幾何法將連通式油氣懸架非線性系統模型精確線性化,建立了半主動連通式油氣懸架精確反饋線性化控制系統,利用AMESim和MATLAB/Simulink對半主動連通式油氣懸架進行了聯合仿真。仿真結果表明,半主動連通式油氣懸架與被動懸架相比,較好地改善了上車的振動性能,縮短了連通式油氣懸架在受沖擊作用時的穩定時間,減小了懸架上車的瞬時沖擊的最大值,提高了懸架的減振能力和抗側傾能力。半主動連通式油氣懸架改善了懸架動撓度,使懸架動撓度過渡平緩,降低了瞬時波動強度。
關鍵詞:半主動;連通式油氣懸架;非線性;聯合仿真
0引言
油氣懸架是由油液傳遞壓力,氣體作為彈性介質的一種懸架,廣泛應用于軍用車輛、工程機械、礦用自卸車和農業機械[1-2]。按照車橋懸架油缸是否互連,可以把油氣懸架分為獨立式油氣懸架和連通式油氣懸架,連通式油氣懸架由于可以實現左右懸架油缸油液的相互流動,從而可以大大提高懸架的側傾角剛度[3]。
相對于主動油氣懸架,半主動油氣懸架結構簡單、耗能低、實現方便,且性能優于被動油氣懸架,因此得到國內外學者的廣泛關注[4-5]。目前半主動油氣懸架的控制策略主要包括天棚阻尼控制[6]、模糊控制[7]、最優控制[8]、自適應控制[9]、神經網絡控制[10]等。對于油氣懸架的主動或半主動控制,大多數學者以獨立懸架為研究對象,并不涉及左右懸架油缸之間的油液流動問題,且控制變量較少,系統相對簡單。史俊武等[11]利用微分幾何法實現了導彈發射車油氣懸架的精確線性化,并得到了較好的主動控制效果,但其并不涉及左右懸架油缸連通問題。王洪禮等[12]應用微分幾何理論對主動懸架進行了控制研究,采用高次多項式擬合非線性彈性力與阻尼力,但是未給出力發生器模型。么鳴濤等[13]利用微分幾何法實現了半主動油氣懸架的精確線性化,并且利用線性二次型調節器實現了非線性狀態反饋最優控制,但是其懸架模型比較簡單,與實際液壓懸架模型有一定差距。方新[14]等分析了阻尼孔大小對連通式油氣懸架性能的影響,阻尼孔越小可越快速消除懸架的振動,但是在復原行程中,為了減小油缸小腔憋壓和復原行程的加速度,又要求阻尼孔越大越好,由于被動油氣懸架無法實現阻尼孔的實時調節,因此難以解決上述問題。為此,本文根據懸架的振動性能,實時調整阻尼孔大小,以適應懸架不同的工作狀態。由于要同時調整兩個阻尼孔的大小,因此,該懸架半主動控制系統是一個典型的多輸入多輸出(MIMO)非線性系統,本文采用微分幾何法將連通式油氣懸架非線性系統精確線性化,設計了精確反饋線性化控制系統,實現了對連通式油氣懸架的半主動控制,通過AMESim和MATLAB/Simulink軟件的聯合仿真實驗,驗證了系統的有效性。
1連通式油氣懸架系統建模
連通式油氣懸架左右兩側懸架油缸的無桿腔和有桿腔通過油路互連,當懸架向一側傾斜時,由于重力作用傾斜側承受更多的附加力,迫使傾斜側懸架油缸壓縮,而另一側由于液壓油向有缸腔流動,同樣會使其相對壓縮,這樣懸架的重心降低,從而提高了懸架的抗側傾能力。
1.1連通式油氣懸架動力學建模
圖1所示為連通式油氣懸架的動力學模型,主要由左右側懸架油缸、上車、左右側下車以及液壓回路組成。左右兩側的蓄能器主要為懸架系統提供油氣彈力,阻尼孔的作用是消除振動,單向閥的作用是在懸架受到沖擊作用的時候,能及時為有桿腔補油。圖1中,pl、pr、pl1、pr1、pl2、pr2、pl3、pr3分別為液壓懸架系統各個位置的壓力,lg1、lg2分別為各段管路的長度,dg1、dg2和Ag1、Ag2為對應管路的內徑和通流截面積,mlw、mrw為左右懸架下車承載質量,mb為上車承載質量,Fl、Fr分別為左右懸架的油氣彈力,zlr、zrr為左右路面干擾,zlw、zrw為左右懸架下車振動位移,zb為上車振動位移,θ為上車的側傾角,Kt為下車彈簧剛度,g為重力加速度,a為上車左右懸架油缸兩支點間距離的一半,J為上車轉動慣量。系統動力學公式如下:
(1)
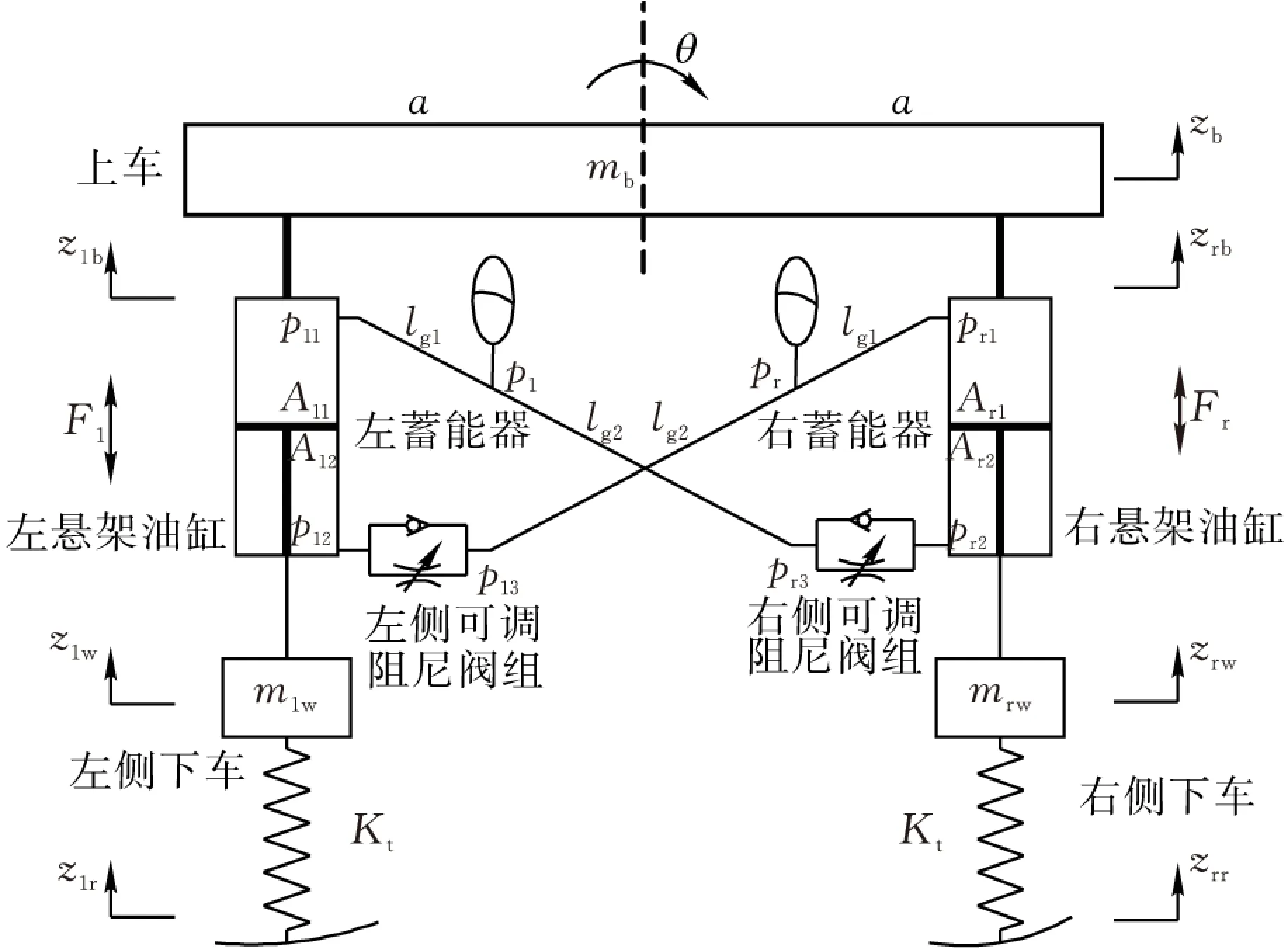
圖1 連通式油氣懸架動力學模型
1.2連通式油氣懸架非線性系統模型
對左右懸架油缸進行分析,有
Fl=pl1Al1-pl2Al2
(2)
Fr=pr1Ar1-pr2Ar2
(3)

考慮管路沿程損失,由流體力學相關知識可得[15]
(4)
(5)
(6)
(7)
其中,zlb、zrb分別為懸架上車左右兩側的振動位移,v1、v2分別為左右兩側懸架油缸和活塞的相對運動速度,vl1g、vr1g和vgr3、vgl3分別為左右懸架油缸無桿腔到蓄能器和蓄能器到可調阻尼閥各段管路內油液流速,λl1g、λgl3、λr1g、λgr3為各段管路的沿程阻力系數,具體根據符號下標與各段管路內油液流速相對應。
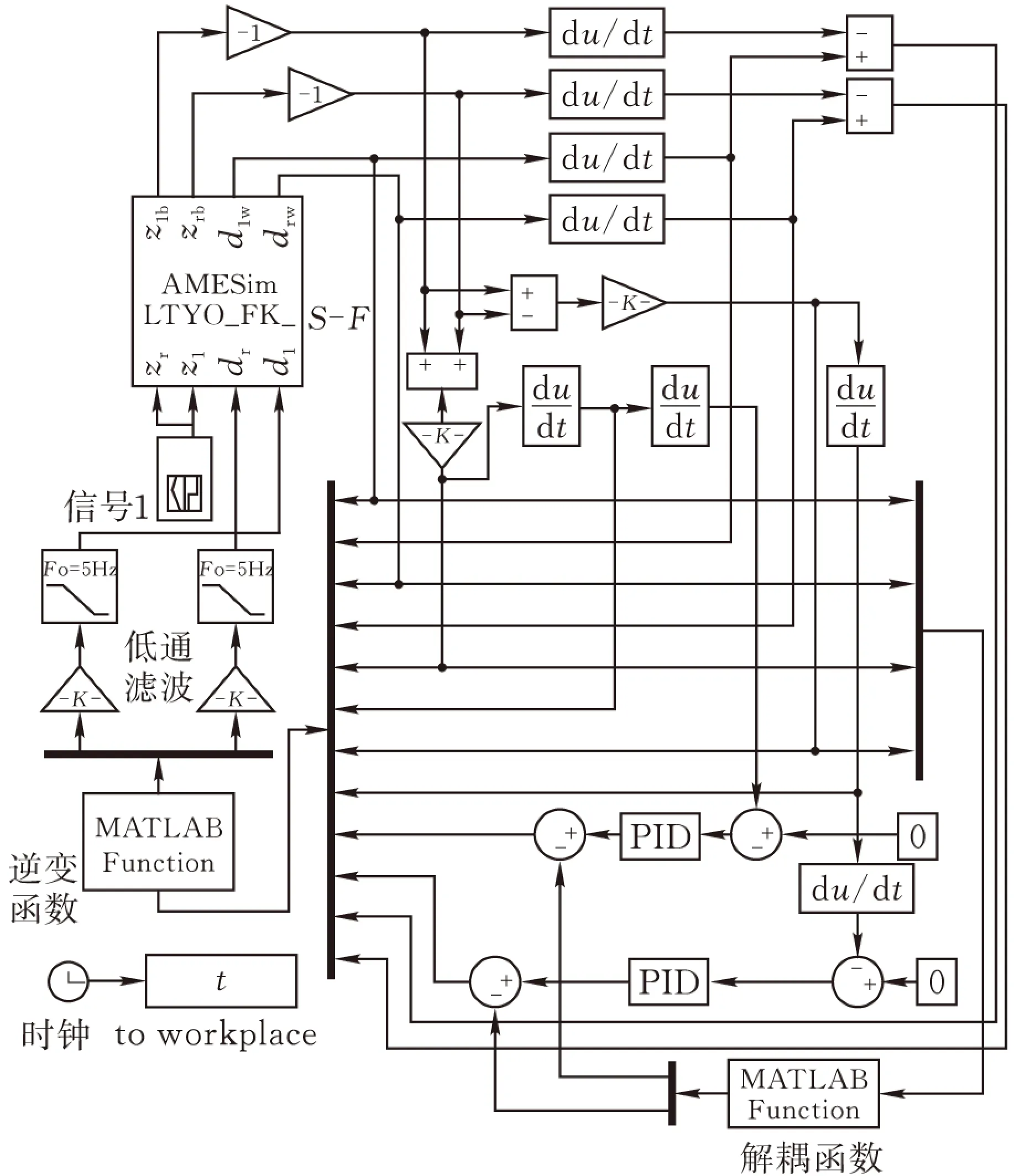
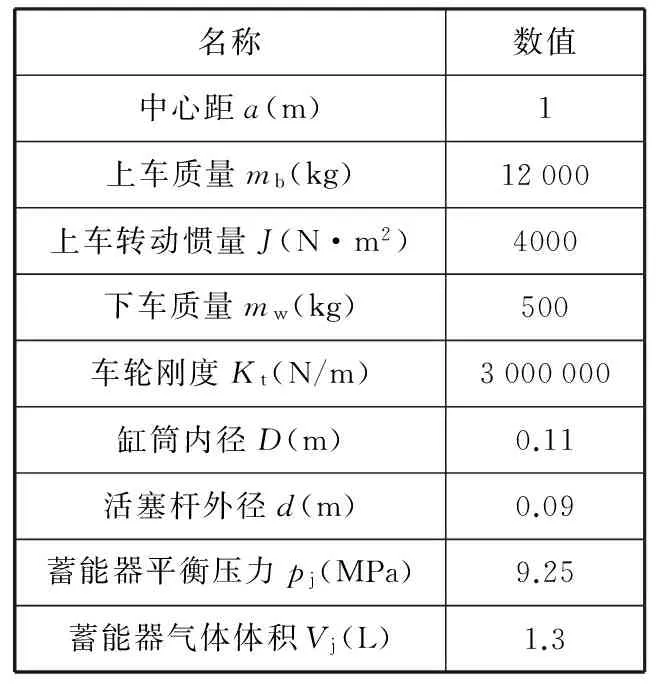
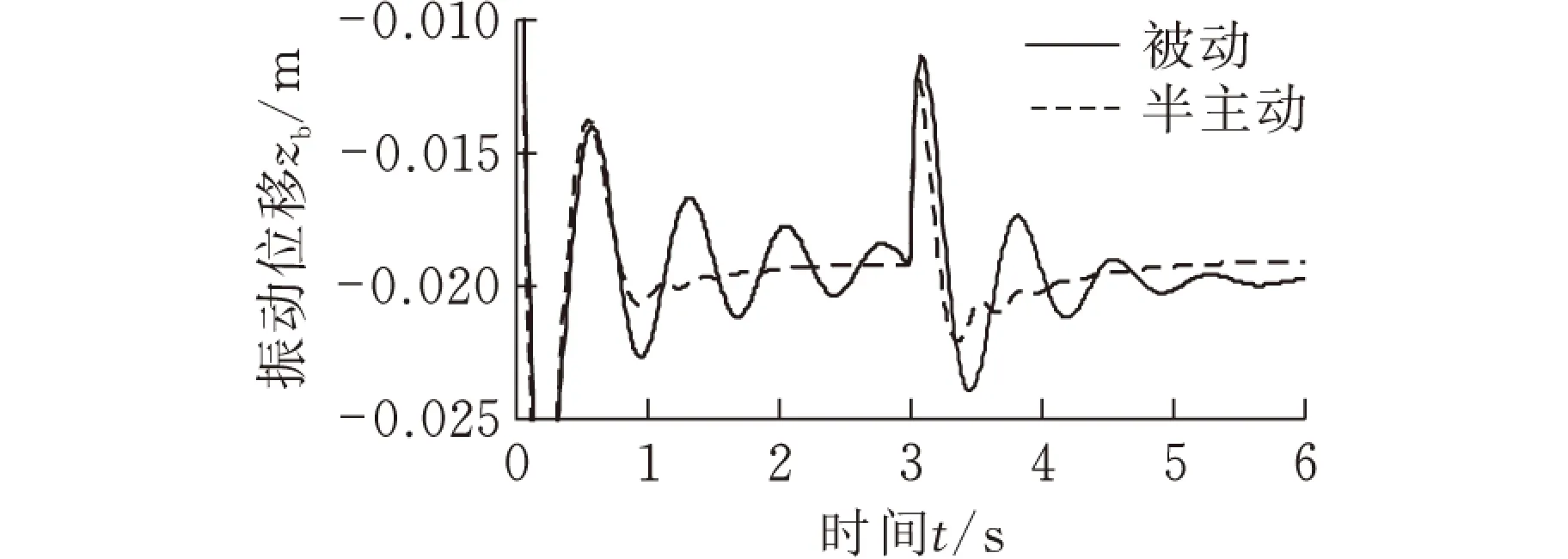
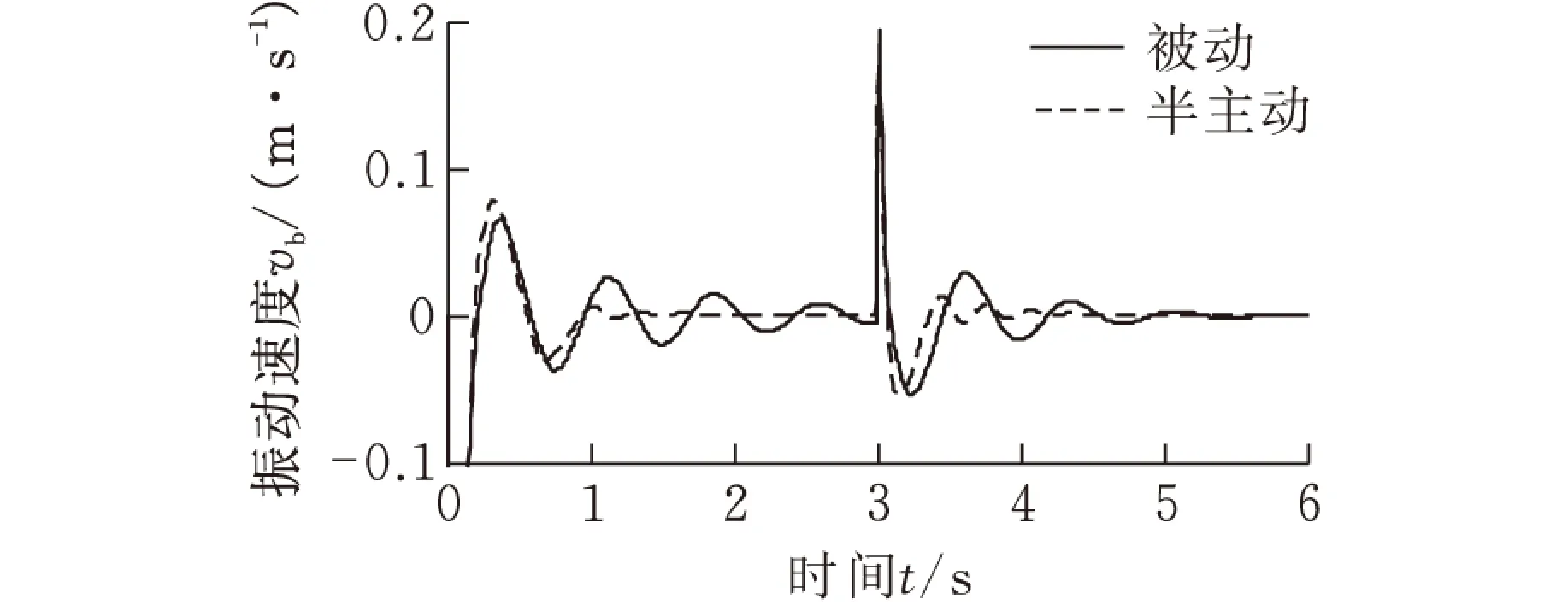
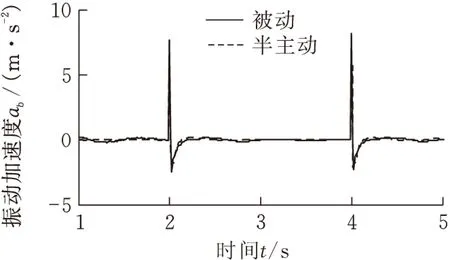
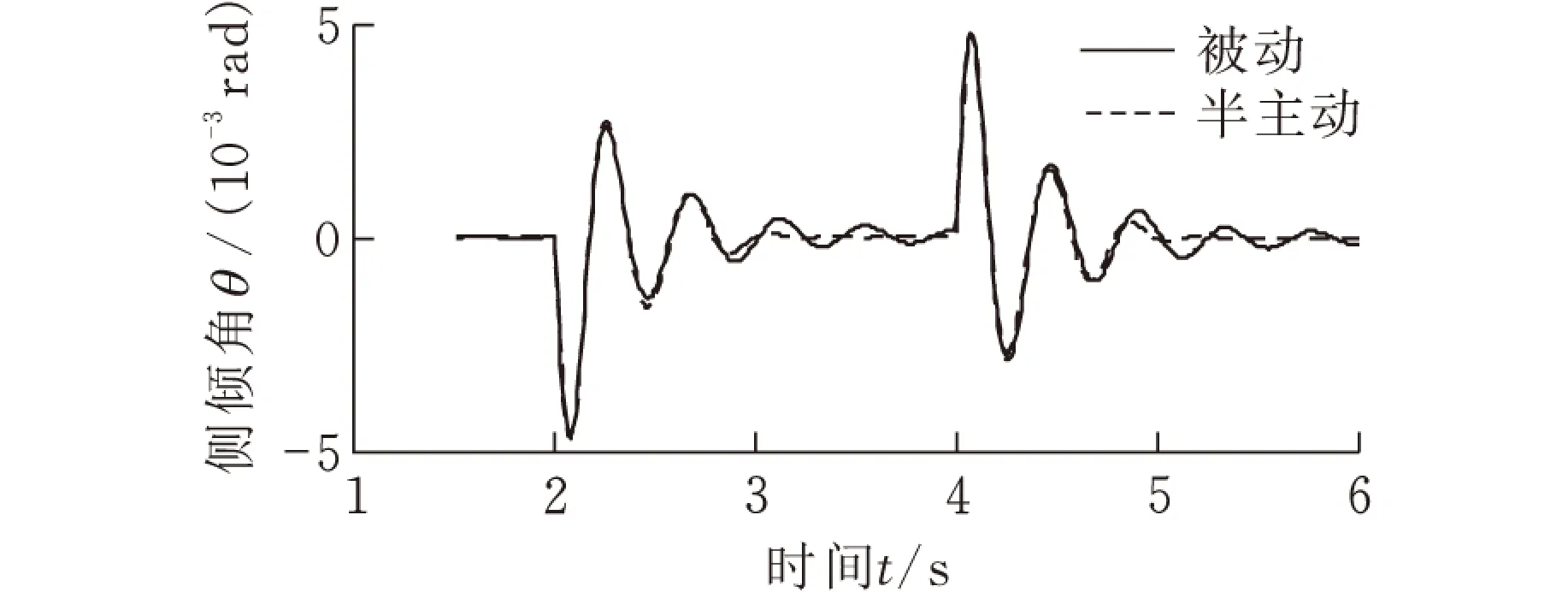
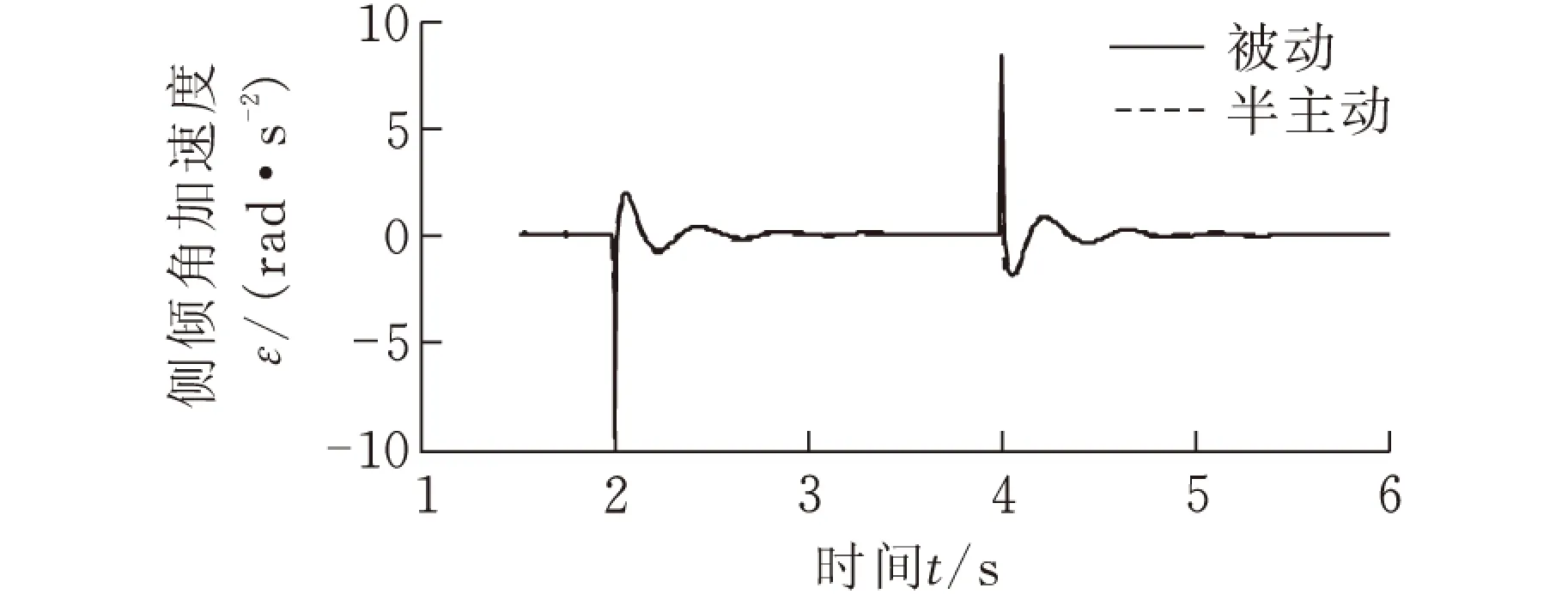
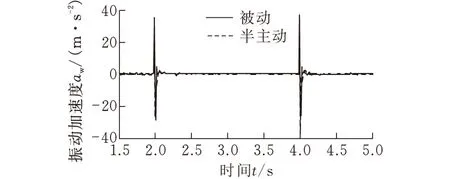
其中,D、d分別為懸架油缸有桿腔直徑和無桿腔直徑。一般油氣懸架系統的管路中雷諾數Re不會超過105[14],因此,管路中阻尼考慮了兩種狀態:Re≤2000和2000 其中,vg為管路內液體流速,dg為管路內徑,μ為液壓油運動黏度,m2/s,在北方用32號液壓油,在南方用46號液壓油。 軟管沿程阻力系數可由下式確定[3]: 其中,Δ為管壁表面粗糙度,橡膠軟管Δ取0.03mm,Δ/d為管壁的相對粗糙度。 左右兩側蓄能器和懸架油缸相互連通,在忽略油液的可壓縮性條件下,總的油液體積是一定的。對左側蓄能器進行分析,當懸架處于振動狀態時,忽略溫度變化,蓄能器內的氣體瞬時壓力pl可用理想氣體狀態方程描述[16-18],即 (8) 式中,pl、Vl分別為左側蓄能器瞬時壓力和瞬時氣體體積;pj、Vj分別為懸架處于平衡狀態時的蓄能器壓力和氣體體積;r為氣體多變指數。 蓄能器內氣體體積為 Vl=Vj-(zlw-zlb)A1+(zrw-zrb)A2 (9) 聯立式(8)、式(9)得左側蓄能器瞬時壓力為 (10) 同理,右側蓄能器瞬時壓力為 (11) 式中,pr、Vr分別為右側蓄能器瞬時壓力和瞬時氣體體積。 對單向閥和阻尼孔進行分析,將阻尼孔和單向閥間的油液流動簡化為小孔節流作用,根據小孔節流理論[15],可得 (12) (13) 式中,cz、cd分別為阻尼孔和單向閥的流量系數;Alz、Arz分別為左右阻尼孔開口面積;Ad單向閥開口面積;ρ為液壓油密度。 聯立式(2)~式(13),可得左右油氣懸架輸出力Fl和Fr: (14) (15) 其中 (16) (17) (18) (19) 由式(18)和式(19)可知,ψ1和ψ2為常量。并且從式(14)、式(15)中可以看出左右兩側油氣彈簧的輸出力分別受到對側蓄能器的影響,從而也說明連通式油氣懸架兩側油氣彈簧存在很強的耦合作用。接下來將以u1和u2為控制變量對連通式油氣懸架進行精確反饋線性化控制研究。然后,通過式(16)、式(17)反求得到實時狀態下的阻尼孔大小,最終實現對聯通式油氣懸架的半主動控制。 1.3連通式油氣懸架精確線性化 采用非線性系統精確線性化的微分幾何法對半主動連通式油氣懸架系統進行精確線性化。 選取狀態變量 路橋施工技術與其質量控制是非常重要的,為減少公路橋梁維修成本打下堅實而有力的基礎,對于行人的安全提供了重要保障,減少了橋梁斷裂和路面崩塌這樣的小概率危險性事件的發生,社會對于橋梁質量的高度認可,還可以增加其施工企業在這一行業的名氣與信譽度[1]。 (x1,x2,x3,x4,x5,x6,x7,x8)= 從而,可將狀態空間方程表示為下式所示的仿射非線性形式[11-12]: (20) 為了能夠實現系統輸入-輸出的線性化,選取輸出變量x5、x7,即上車的振動位移和側傾角,從而有 根據非線性系統的解耦條件,選取反饋變換[19-20]: (21) A(x)= (22) (23) 求解式(23)得 M=Vj-(x1-x5-ax7)A1+(x3-x5+ax7)A2 N=Vj-(x3-x5+ax7)A1+(x1-x5-ax7)A2 整理式(21)~式(23)可得線性系統方程: (24) 將上述線性系統用狀態空間描述如下: (25) 其中,z為干擾輸入向量。 2半主動連通式油氣懸架精確反饋線性化控制 圖2 連通式油氣懸架精確反饋線性化控制框圖 圖2為連通式半主動油氣懸架精確反饋線性化控制框圖,系統主要分為逆變器、解耦器、連通式油氣懸架三個部分。由式(24)可以看出,半主動連通式油氣懸架反饋線性化后不但實現了輸入輸出間的線性化,而且實現了兩個輸出的完全解耦,從而原系統被分解成兩個完全獨立的線性子系統。線性系統中新的控制變量ν1、ν2與系統輸出y5、y7之間有著二重積分的關系,而y5、y7分別為懸架上車的振動位移和側傾角,即控制變量ν1、ν2的大小將直接影響著上車振動加速度和側傾角加速度,因此系統選用上車振動加速度和側傾角加速度的理想值作為控制輸入,以二者的實際值作為反饋,通過PID調整后,再結合式(23),即可實現對連通式半主動油氣懸架的精確反饋線性化控制。 2.2半主動連通式油氣懸架仿真實驗 圖3 連通式油氣懸架AMESim仿真模型 圖4 連通式油氣懸架Simulink仿真模型 為了驗證控制系統的有效性,采用AMESim和MATLAB/Simulink對半主動連通式油氣懸架進行聯合仿真。圖2中連通式油氣懸架采用AMESim建模,模型如圖3所示,由于在AMESim中很難同時表示出上車垂直方向的振動和附加的側傾運動,因此將上車簡化為左右兩部分,側傾角則可用上車左右兩部分的相對運動間接表示。控制系統在Simulink中建模,如圖4所示。路面激勵采用“等腰三角形凸塊”[14],凸塊高40 mm,寬400 mm,車速為60 km/h。仿真數據采用LTM1500全路面起重機的油氣懸掛參數,其主要參數見表1。 2.3仿真結果對比分析 2.3.1同一時刻干擾作用下仿真結果對比分析 圖5所示為基于精確反饋線性化及PID控制的半主動連通式油氣懸架與被動連通式油氣懸架在左右懸架同時受干擾作用時上車振動位移、速度和加速度對比曲線。從圖5中可以看出,經半主動控制后的連通式油氣懸架能夠快速達到平衡,且消減了瞬時沖擊。通過對數據進行分析,上車的瞬時沖擊位移由-0.0114 m變化到-0.0123 m,之所以為負值,是由于重力作用下,懸架整體下降,最終平衡在-0.019 m的位置,最大振幅分別為7.6 mm、6.7 mm,降幅為11.8%。振動速度由0.19 m/s降低到0.17 m/s,降幅為10.5%。振動加速度最大值由17.92 m/s2降低到12.89 m/s2,降幅為28%。 表 1 仿真參數 (a) 上車振動位移 (b) 上車振動速度 (c) 上車振動加速度圖5 上車振動性能對比曲線(同一時刻干擾作用下) 圖6、圖7分別為左右懸架同時受干擾作用時下車的振動加速度和懸架動撓度對比曲線。由于加速度反映了下車的受力情況,所以對于下車的振動,在此更關注其加速度的大小。通過圖6可以看出,半主動控制的連通式油氣懸架在受沖擊作用時,沖擊加速度的振幅由被動時的66.8 m/s2降低到60.0 m/s2,降幅為10.2%。懸架動撓度的大小,反映了車輛的舒適性,從圖7中可以看出,經半主動控制后的連通式油氣懸架與被動油氣懸架相比,其動撓度過渡平緩,波動小,性能較好。 圖6 下車振動加速度(同一時刻干擾作用下) 圖7 懸架動撓度(同一時刻干擾作用下) 2.3.2不同時刻干擾作用下仿真結果對比分析 圖8所示為基于精確反饋線性化及PID控制的半主動連通式油氣懸架與被動連通式油氣懸架上車的振動性能對比曲線。從圖8可以看出,經過半主動控制后的連通式油氣懸架的上車振動性能相對于被動油氣懸架的上車振動性能明顯得到了改善,在一定程度上消減了瞬時沖擊作用,并明顯縮短了懸架在受干擾作用后的穩定時間。從數值上看,在2 s和4 s時刻,懸架受沖擊后的振動位移的振幅由被動油氣懸架的3.8 mm、2.35 mm降低到1.85 mm、1.9 mm,降幅為51%和19%;沖擊加速度的最大值則分別由被動懸架的7.67 m/s2、8.2 m/s2降低到7.65 m/s2、5.7 m/s2,2 s時刻基本上持平,4 s時刻降幅為30.1%。 (a)上車振動位移 (b)上車振動速度 (c)上車振動加速度圖8 上車振動性能對比曲線(不同時刻干擾作用下) (a)側傾角位移 (b)側傾角加速度圖9 懸架上車側傾角性能對比曲線 圖9所示為基于精確反饋線性化及PID控制的半主動連通式油氣懸架與被動連通式油氣懸架上車的側傾角位移和側傾角加速度對比曲線。圖9a表明,半主動控制的連通式油氣懸架相對于被動式油氣懸架并沒有消減懸架沖擊瞬間的側傾角最大位移,但是明顯縮短了上車側傾角的穩定時間。側傾角加速度對比曲線表明,半主動控制的連通式油氣懸架明顯消減了沖擊瞬間的側傾角加速度,在2 s和4 s時刻的沖擊中,懸架的側傾角加速度分別由被動時的-9.5 rad/s2、8.4 rad/s2變化到-7.4 rad/s2、6.9 rad/s2,降幅分別為22%和17.9%。由于側傾角加速度反映了懸架受到的慣性側傾力矩,側傾角加速度越大車輛越容易傾覆,從而說明,基于精確反饋線性化及PID控制的半主動連通式油氣懸架提高了車輛的抗側傾能力。 圖10、圖11所示分別為基于精確反饋線性化及PID控制的半主動連通式油氣懸架與被動連通式油氣懸架下車振動加速度和懸架動撓度對比曲線。懸架下車的振動加速度對比曲線表明,半主動控制后的連通式油氣懸架并沒有改善下車的振動加速度,從數值上看,在2 s和4 s沖擊瞬間的半主動控制油氣懸架下車的振動加速度分別由被動時的31.8 m/s2、36.8 m/s2分別增(減)到35.3 m/s2和33.85 m/s2,增(降)幅分別為11%和8%。此外,在4 s時刻,半主動控制的油氣懸架在回復行程的加速度由被動時的-25.9 m/s2變化到-37.5 m/s2,即說明半主動控制后懸架下車的振動性能沒有得到改善。之所以出現下車振動性能變差的情況,與控制系統的控制變量的選擇有密不可分的關系,對于懸架系統由于其變量較多,不可能保證所有的變量都能達到預期的控制效果,一部分變量的改善必定會造成其他一些變量性能的惡化,而本文中更加關注的是上車的振動性能、懸架的動撓度和懸架的側傾角,從而降低了對下車振動性能的要求,即當懸架下車的振動性能相對于被動油氣懸架沒有出現嚴重的惡化情況,仍然在接受范圍內的。 圖10 下車振動加速度(不同時刻干擾作用下) 圖11 懸架動撓度(不同時刻干擾作用下) 懸架動撓度的對比曲線表明,半主動控制的連通式油氣懸架的動撓度相對于被動油氣懸架無論是在消減瞬時沖擊,還是在縮短懸架的穩定時間上都得到了明顯的改善。從數值上分析,在2 s和4 s的沖擊瞬間,半主動控制的連通式油氣懸架的沖擊振幅由被動時的3.48 mm、3.66 mm降低到3.01 mm、2.90 mm,降幅分別為13.5%和20.8%。 3結論 (1)本文建立了連通式油氣懸架的非線性數學模型,在此基礎上利用微分幾何法將連通式油氣懸架非線性系統模型精確線性化,設計了半主動連通式油氣懸架精確反饋線性化控制系統,并對控制系統進行了AMESim/Simulink聯合仿真實驗。 (2)仿真結果表明,基于精確反饋線性化及PID控制的半主動連通式油氣懸架對上車的振動性能及懸架動撓度具有較好的改善作用,它縮短了連通式油氣懸架在受干擾作用后的穩定時間,消減了懸架上車的瞬時沖擊,提高了懸架的減振能力和抗側傾能力。此外,使懸架動撓度過渡平緩,降低了動撓度的瞬時波動。 (3)半主動控制的連通式油氣懸架對下車的振動性能改善并不明顯,在左右懸架同時受到激勵作用時,對下車的振動加速度有一定的改善,然而左、右懸架在不同時刻受到干擾作用時,下車振動加速度性能有一定的惡化,但在可接受范圍之內。 參考文獻: [1]吳仁智, 劉釗. 全路面起重機油氣懸架液壓系統技術分析[J]. 中國工程機械學報,2006, 4(1): 8-11. Wu Renzhi, Liu Zhao. Analysis on Hydraulic System and Technology Features of Hydro-pneumatic Suspension All Terrain[J]. Chinese Journal of Construction Machinery, 2006, 4(1): 8-11. [2]楊杰,陳思忠,吳志成,等.可調阻尼閥參數對油氣懸架阻尼特性的影響[J].農業機械學報,2009,40(2):12-17. Yang Jie, Chen Sizhong , Wu Zhicheng ,et al . Analysis on the Effect of Controllable Valve Parameters on Hydro-pneumatic Suspension Damping Characteristics [J] . Transactions of the Chinese Society for Agricultural Machinery , 2009,40(2):12-17. [3]王欣, 方新, 高順德. 連通式油氣懸掛系統剛度特性分析[J]. 機床與液壓, 2012, 40(9):55-57. Wang Xin, Fang Xin, Gao Shunde. Analysis on Stiffness Characteristic of a Connected Hydro-pneumatic Suspension System[J]. Machine Tool & Hydraulics, 2012,40(9):55-57. [4]吳光強, 黃煥軍, 葉光湖.基于分數階微積分的汽車懸架半主動控制[J]. 農業機械學報, 2014,45(7):19-24. Wu Guangqiang, Huang Huanjun, Ye Guanghu. Semi-active Control of Automotive Air Suspension Based on Fractional Calculus[J]. Transactions of the Chinese Society for Agricultural Machinery, 2014,45(7):19-24. [5]Crosby M J, Karnopp D C. The Active Damper a New Concept for Shock and Vibration on Control [J]. The Shock and Vibration Bulletin, 1973,43(4):119-133. [6]陳一鍇, 何杰, 張衛華. 多軸重型貨車懸架系統改進天棚控制策略[J].農業機械學報,2011,42(6):16-22. Chen Yikai, He Jie, Zhang Weihua. Modified Skyhook Damping Control of Multi-axial Heavy Truck Suspension System[J]. Transactions of the Chinese Society for Agricultural Machinery,2011,42(6):16-22 [7]蘭波,喻凡.車輛主動懸架模糊控制器的設計及其仿真分析[J].計算機仿真,2003,31(7):59-61. Lan Bo , Yu Fan . The Design of Fuzzy Logic Controller of Active Suspension and Simulation Analysis[J]. Computer Simulation, 2003,31(7):59-61. [8]Taghirad H D, Esmailzadeh E. Automobile Passenger Comfort Assured through LQG/LQR Active Suspension[J]. Journal of Vibration and Control, 1998, 4(5): 603-618. [9]陳龍, 李德超, 周孔亢. 自適應模糊控制技術在半主動懸架控制中的應用[J].農業機械學報, 2005, 36(4):5-8. Chen Long, Li Dechao, Zhou Kongkang. Application of Adaptive Fuzzy Control in Vehicle Semi-active Suspension System[J]. Transactions of the Chinese Society for Agricultural Machinery,2005, 36(4):5-8. [10]楊林,趙玉壯,陳思忠,等.半主動油氣懸架的神經網絡模型參考控制[J].北京理工大學學報,2011,31(1):24-28. Yang Lin , Zhao Yuzhuang , Chen Sizhong ,et al . Neural Network Model Reference Control for Semi-active Hydro-pneumatic Suspension[J]. Transactions of Beijing Institute of Technology , 2011,31(1):24-28. [11]史俊武, 李小偉, 張建武. 導彈發射車主動油氣懸架反饋線性化控制[J]. 系統仿真學報, 2009,21(23):7617- 7621. Shi Junwu, Li Xiaowei,Zhang Jianwu. Feedback Linearization Control for Missile Launch Vehicle Active Hydropneumatic Suspension[J]. Journal of System Simulation, 2009, 21 (23):7617-7621. [12]王洪禮,石磊. 汽車懸架系統非線性振動的主動控制[J]. 機械強度, 2000, 22(3): 164-166. Wang Hongli, Shi Lei. Active Control for Nonlinear Vibration of Automotive Suspension[J]. Journal of Mechanical Strength, 2000,22(3):164-166. [13]么鳴濤,李釗,顧亮,等.基于微分幾何法的半主動油氣懸架LQR控制[J].北京理工大學學報,2011,31(5):519-523. Mo Mingtao,Li Zhao,Gu Liang.LQR Control for Vehicle Semi-active Hydro-pneumatic Suspension Based on Differential Geometry Theory[J].Tansactions of Beijing Institute of Technology, 2011,31(5):519-523. [14]方新. 連通式油氣懸架系統特性研究[D]. 大連:大連理工大學, 2011. [15]王惠民. 流體力學[M]. 北京: 清華大學出版社, 2005. [16]Sarshari E, Sedigh A K, Sadati H. Optimal Control of Ride Comfort of a Passenger Car: Comparison between the Hydro Active and the Fully Active Suspension Systems[J]. SAE Technical Paper, 2010-01-1913. [17]Sarshari E, Asadi N. Design of Hydro-active Optimal Suspension for a Passenger Vehical[C]//Proceedings of the ASME 2010 International Mechanical Engineering Congress & Exposition.Texes:IMECE 2010-40630. [18]Sarshari E, Sedigh A K. Selection of Sensors for Hydro-active Suspension System of Passenger Car With Input-Output Pairing Considerations[J]. Journal of Dynamic Systems, Measurement, and Control, 2013, 135(1): 11004. [19]崔平遠,薛小平,陳沖.非線性系統精確線性化的微分幾何法[J].飛行力學,1993,11(2):1-9. Cui Pingyuan,Xue Xiaoping,Chen Chong.Differential Geometric Approach for Exact Linearization of Nonlinear Systems[J].Flight Dynamics,1993,11(2):1-9. [20]崔平遠, 薛小平. 多輸入非線性系統的狀態反饋線性化[J].哈爾濱工業大學學報,1993,25(3):84-90. Cui Pingyuan,Xue Xiaoping.Linearization with State Feedback for Multi-input Nonlinear System[J].Journal of Harbin Institute of Technology,1993,25(3):84-90. (編輯王艷麗) ISSN1004-132X CHINAMECHANICALENGINEERING (TransactionsofCMES) Vol.27,No.4,2016thesecondhalfofFebruary Semimonthly(SerialNo.436)EditedandPublishedby:CHINAMECHANICAL ENGINEERINGMagazineOffice Add:P.O.Box772,HubeiUniversityofTechnology,Wuhan,430068,ChinaDistributerAbroadby:ChinaInternationalBook TradingCorporation(P.O.Box399,Beijing) Code:SM4163 ExactLinearizationandFeedbackControlofSemi-activeConnectedHydro-pneumaticSuspension CaoXuyangCaoLinlinWangDianlong DalianUniversityofTechnology,Dalian,Liaoning, 116024 Abstract:Based on differential geometry theory, the nonlinear system was transformed to a linear one, and the linear feedback control system of semi-active connected hydro-pneumatic suspension was done. With the software AMESim and MATLAB/Simulink, the co-simulation model of semi-active connected hydro-pneumatic suspension was completed. The simulation results show that the semi-active connected hydro-pneumatic suspension improves the property of upper vehicle, which decreases the stable time of instantaneous impact and the maximum values of instantaneous impact and enhances the ability of vibration damping and overturning resistance. Moreover, it improves suspension dynamic flexibility, which makes the suspension vibrate more smoothly and reduces the instantaneous vibration intensity. Key words:semi-active; connected hydro-pneumatic suspension; nolinearity; co-simulation 收稿日期:2015-02-02 基金項目:工信部聯裝[2012]533號 中圖分類號:U463 DOI:10.3969/j.issn.1004-132X.2016.04.024 作者簡介:曹旭陽,男,1974年生.大連理工大學機械工程學院副教授。主要研究方向為起重機液壓控制設計與仿真。發表論文40余篇。操林林,男,1990年生。大連理工大學機械工程學院碩士研究生。王殿龍,男,1962年生。大連理工大學機械工程學院教授、博士研究生導師。