抗差自適應濾波算法在實時定軌中的應用
2016-06-27 02:03:23李鑄洋
導航定位學報 2016年2期
任 夏,李鑄洋,丁 陽
(1. 信息工程大學 導航與空天目標工程學院, 鄭州 450001;2. 地理信息工程國家重點實驗室,西安 710054;3. 61363部隊,西安 710054;4. 北京衛星導航中心, 北京 10094)
抗差自適應濾波算法在實時定軌中的應用
任夏1,2,李鑄洋3,丁陽4
(1. 信息工程大學 導航與空天目標工程學院, 鄭州450001;2. 地理信息工程國家重點實驗室,西安710054;3. 61363部隊,西安 710054;4. 北京衛星導航中心, 北京10094)
摘要:影響動力平滑定軌精度的因素包括觀測值質量和濾波方法。采用抗差自適應濾波算法以控制觀測值和動力學模型異常對定軌精度的影響,并以實測數據進行實驗。算例結果表明,基于抗差自適應濾波算法的動力平滑定軌可以有效控制觀測異常的影響,消弱定軌結果對狀態噪聲補償方法的依賴,比傳統的濾波定軌方法精度更高。
關鍵詞:動力平滑;觀測異常;抗差自適應濾波;定軌
0引言
基于全球定位系統(global positioning system,GPS)的動力平滑實時定軌方法是對GPS觀測信息和動力學模型信息的有效融合,既可以平滑幾何法定軌中大的隨機誤差,也可以在一定程度上控制動力學定軌的發散問題。動力平滑定軌可以直接以GPS單點定位結果作為濾波觀測值,通過卡爾曼(Kalman)濾波方法實時進行解算[1-3]。近年來,雖然GPS觀測值的精度已大大提高,但錯誤數據不可避免,尤其是偽距觀測值容易受到異常值的影響。此外,擴展Kalman濾波(extended Kalman filter,EKF)也不可避免地存在濾波發散的問題。學者們考慮通過平方根濾波等新型濾波方法解決EKF存在的不足[4-7]。自適應抗差濾波理論在衛星導航、定軌等多個面得到廣泛應用[8-12]。文獻[13]提出將自適應抗差濾波和sage濾波相結合,應用于衛星精密定軌中,并以仿真數據進行實驗。該方法適用于飛行器處于穩定狀態和非穩定狀態2種狀態,在穩定條件下使用sage濾波,而在非穩定狀態下通過構造等價權因子和自適應因子調節濾波觀測信息和動力學模型信息對定軌結果的貢獻。
基于已有的成果,本文基于重力反演與氣候實驗衛星(gravity recovery and climate experiment,GRACE)實測數據,對抗差自適應濾波算法在實時定軌中的作用和精度進行討論,重點分析了抗差估計對偽距觀測異常的探測和抑制作用,比較了擴展Kalman濾波和自適應濾波在動力平滑定軌中的精度和穩定性。
1抗差自適應濾波原理
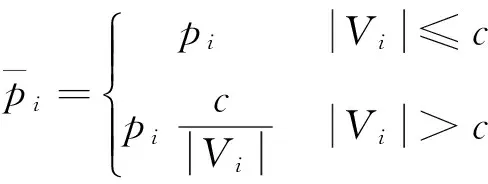
抗差自適應濾波建立在EKF的基礎上,適用于觀測模型與動力學模型誤差均不服從高斯白噪聲分布的情況。抗差自適應濾波對異常觀測值采用抗差估計原則,對動力學模型異常采用自適應因子進行調整,可用公式表述為

(1)

(2)
式中:Vi為標準化殘差;c為閾值;自適應因子αk為

(3)

通常,同時對等價權和自適應因子進行計算是不可行的,會造成濾波發散;因此抗差自適應濾波在動力平滑定軌中應用時,應先通過抗差算法進行GPS單點定位解算,控制觀測值粗差,用可靠的抗差單點定位結果確定自適應因子。狀態不符值

(4)
抗差自適應動力平滑定軌的過程如圖1表示。

圖1 抗差自適應濾波流程圖
2算例及分析
本文算例以GRACE-A衛星2013-07-01—03 3 d的偽距觀測數據(采樣間隔為10 s)為基礎,動力學模型考慮了地球引力(20階)和日月引力,狀態轉移矩陣是基于二體問題推導的。
2.1抗差單點定位精度分析

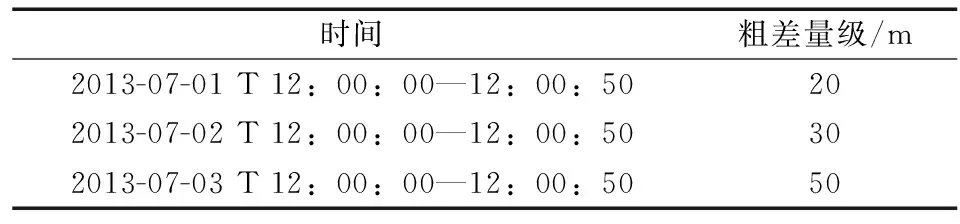
表1 加入粗差量級
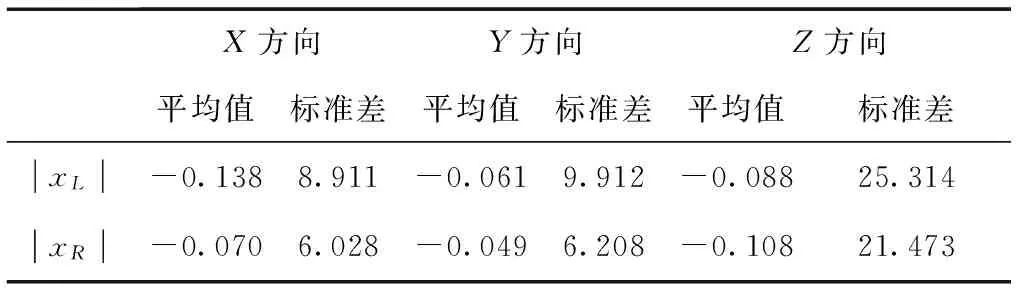
表2 單點定位統計結果 m
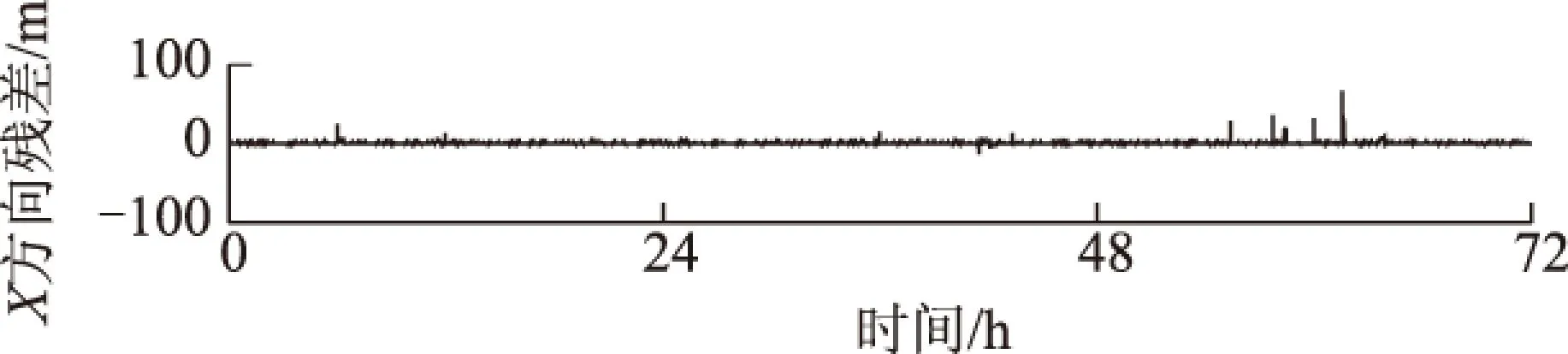
圖2 抗差單點定位與最小二乘單點定位精度比較(X方向)
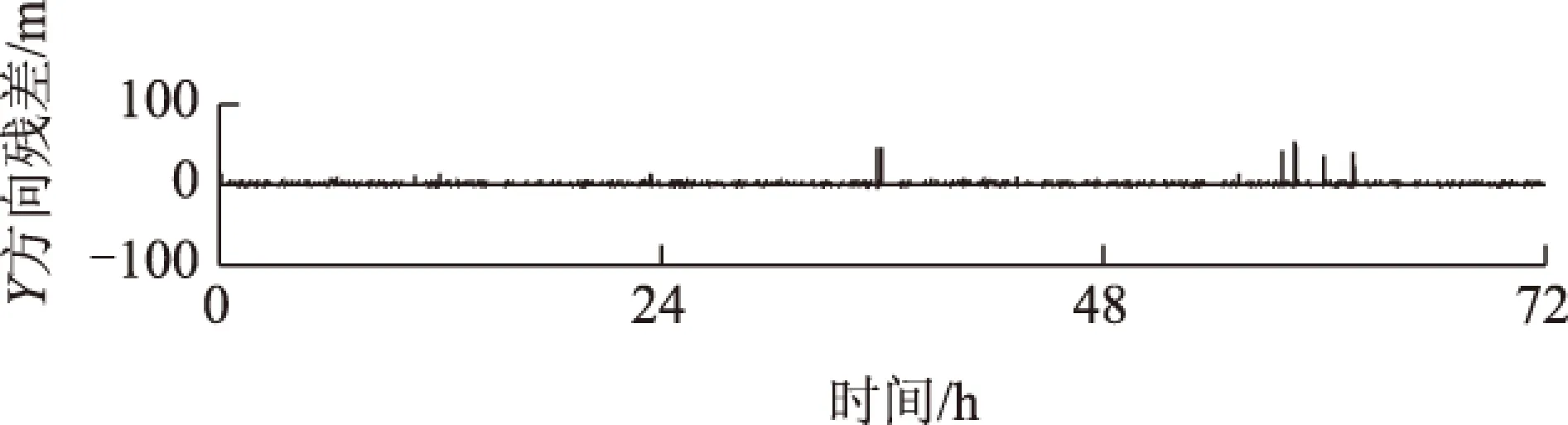
圖3 抗差單點定位與最小二乘單點定位精度比較(Y方向)
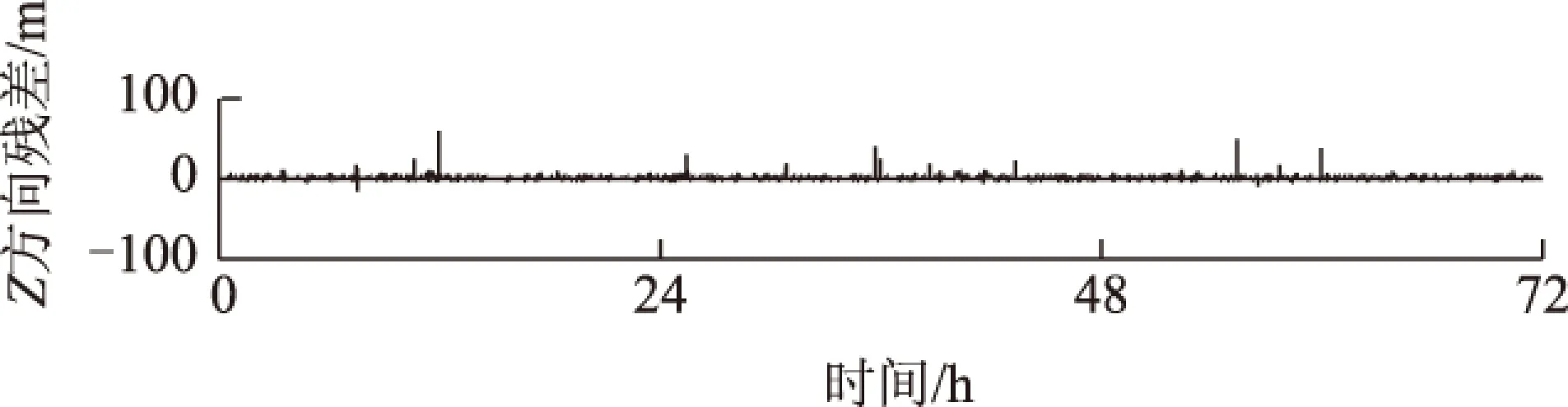
圖4 抗差單點定位與最小二乘單點定位精度比較(Z方向)
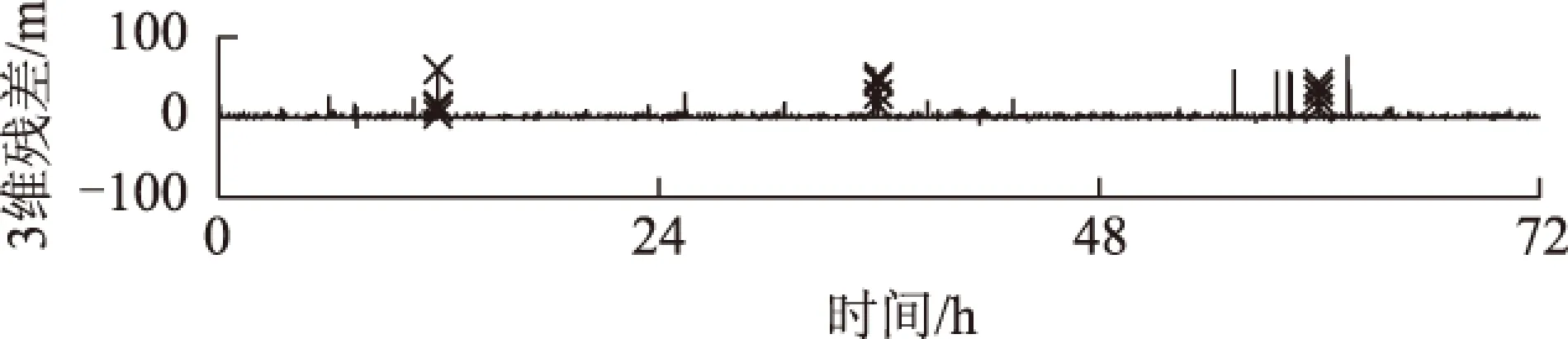
圖5 抗差單點定位與最小二乘單點定位在3維方向上的比較
分析xL-R的特性可知,xL-R可以直觀地反映抗差估計理論在單點定位中的作用效果。分析圖2~5中坐標值的正負可以看出:坐標值為正的點表明抗差估計后對最小二乘單點定位精度有所改進;而坐標值為負的點表明抗差估計后單點定位的精度有所下降。圖5中以叉形符號標記出人為加入粗差的歷元(即表1中的歷元),其結果表明:抗差估計可以精確地探測觀測異常的存在;并控制其對單點定位結果的影響。總體結果表明:對于觀測值正常的歷元,抗差單點定位結果與最小二乘單點定位結果一致;對于觀測值出現異常的歷元,抗差估計算法能夠改善點位坐標精度,對后期的濾波處理提供更充分、可靠的觀測信息。表2中的統計結果表明,抗差估計可以有效控制觀測粗差的影響,提高定軌精度。
2.2抗差自適應動力平滑定軌方法
采用2.1中的數據,分別在表3中幾種不同的噪聲方案下比較擴展Kalman濾波(EKF),和抗差自適應濾波(R-AKF)的精度(以JPL軌道作為標準軌道),統計結果分別列于表4、表5。將方案一的EKF和R-AKF定軌與JPL軌道的比較結果繪于圖6、圖7。
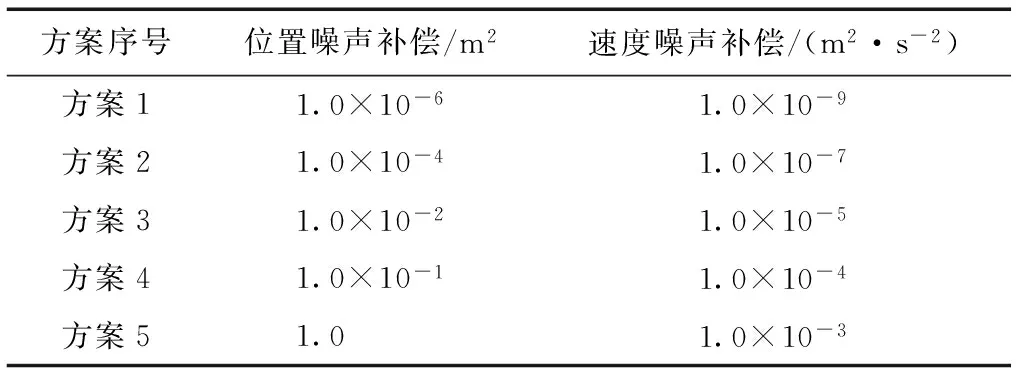
表3 5種濾波方案

表4 不同方案下的EKF濾波統計結果 m
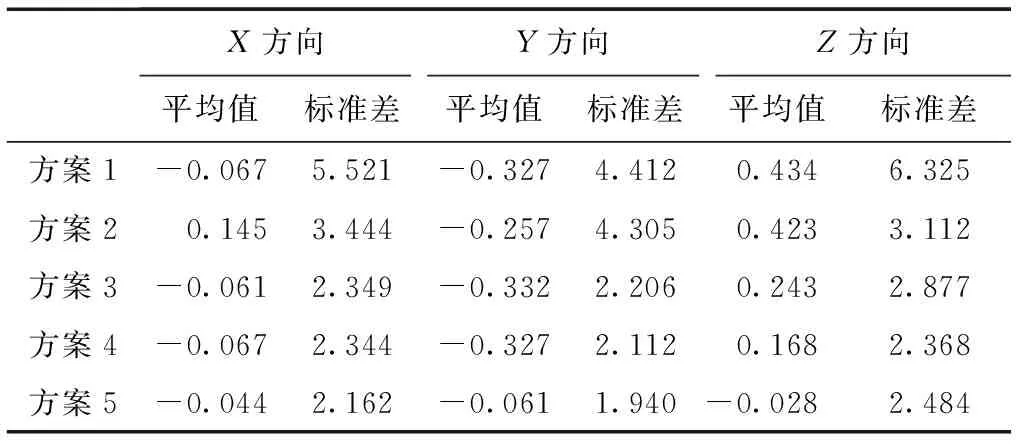
表5 不同方案下的AKF濾波統計結果 m
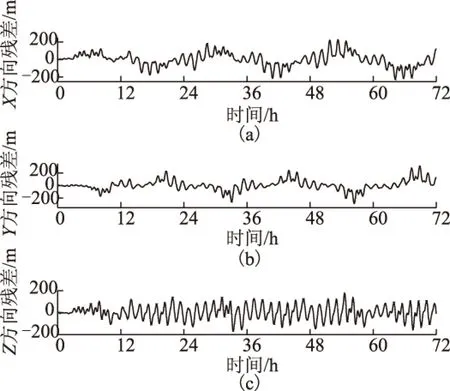
圖6 方案一中EKF濾波與JPL軌道的位置比較結果
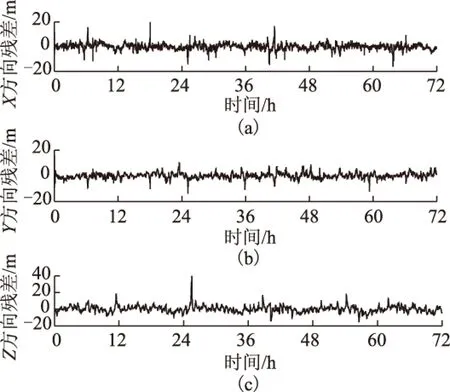
圖7 方案一中AKF濾波與JPL軌道的位置比較結果
通過對表4、表5及圖6、圖7的分析可以得出以下結論:
1)抗差估計可以有效控制異常觀測值對單點定位結果的影響,對精度的改善效果較為明顯;
2)對比不同方案下的EKF濾波結果和AKF濾波結果可以發現,EKF濾波對狀態噪聲補償方案依賴性較強,當狀態噪聲補償不合理時,會出現濾波發散的情況,AKF濾波結果穩定,在不同的噪聲補償方案下都能夠獲得較好的結果;
3)抗差自適應濾波可以充分利用GPS觀測信息,定軌結果穩定。
3結束語
本文通過理論結合實驗,分析了抗差自適應濾波算法對GPS觀測異常的抑制作用,實驗結果表明采用抗差自適應濾波算法進行動力平滑定軌計算,可以在有效控制偽距中粗差對定軌精度的影響的同時,解決經典濾波方法的發散問題。與EKF濾波相比,R-AKF濾波精度較高,穩定性較好。
參考文獻
[1]呂從民.星載GPS實時星定軌方法研究[D].北京:中國科學院空間科學與應用研究中心,2004:6-8.
[2]ASHKENAZI V,CHEN W,HILL C,et al.Real-time autonomous orbit determination of LEO satellites using GPS[C]//The Institute of Navigation.Proceedings of the 10th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION-GPS-97).Manassas,VA:The Institute of Navigation,1997:755-761.
[3]BERTIGER W,HAINES B,KUNAG D,et al.Precise real time low Earth orbiter navigation with GPS[EB/OL].(1999-05-26)[2014-10-28].http://ipnpr.jpl.nasa.gov/progress_report/42-137/137B.pdf.
[4]秦顯平,楊元喜.自適應濾波在LEO星載GPS實時定軌中的應用[J].測繪科學技術學報,2009,34(2):231-235.
[5]秦顯平,楊元喜.平方根濾波/平滑/雙向濾波在LEO星載GPS定軌中的應用[J].武漢大學學報·信息科學版,2009,34(10):1176-1180.
[6]楊元喜,秦顯平.自適應定軌與約化動力定軌理論分析與比較[J].測繪科學與工程,2013,33(1):1-4.
[7]文援蘭,楊元喜,王威.衛星精密軌道抗差估計的研究[J].空間科學學報,2001,21(4):341-350.
[8]李沖,黃觀文,譚理,等.抗差自適應卡爾曼濾波在GPS精密單點定位中的應用[J].測繪科學,2011,36(4):22-23.
[9]YANG Yuanxi,HE Zhengbin,XU Guochang.Adaptively robust filtering for kinematic geodetic positioning[J].Journal of Geodesy,2001,75(2):109-116.
[10]CUI Xianqiang,YANG Yuanxi.Adaptive robust filtering with classified adaptive fators[J].Progress in Natural Science,2006,16(8):846-851.
[11]YANG Yuanxi,CUI Xianqiang.Adaptively robust filter with multi adaptive factors[J].Survey Review,2008,40(309):260-270.
[12]YANG Yuanxi,WEN Yuanlan.Synthetically adaptive robust filtering for satellite orbit determination[J].Science in China Ser.D Earth Sciences,2004,47(7):585-592.
[13]楊元喜.自適應動態導航定位[M].北京:測繪出版,2006:116-124.
Application of robust adaptive Kalman filtering on real-time orbit determination
REN Xia1,2,LI Zhuyang3,DING Yang4
(1. Institute of Navigation and Aerospace Engineering, Information Engineering University, Zhengzhou 450001, China;2.State Key Laboratory of Geo-Information Engineering,Xi’an 710054, China;3. Troops 61363, Xi’an 710054, China;4.Beijing Satellite Navigation Center, Beijing 100094,China)
Abstract:Observation quality and filtering method are two factors that affect the accuracy of dynamic smoothing orbit determination.This paper adopted robust adaptive filtering to control both observation and dynamic model errors.The experiment was based on real measured data,and the result showed that this algorithm could decrease the effect of observation outliers and reduce the rely of orbit precision on state noise compensation with better stability and precision.
Keywords:dynamic smoothing;observation outliers;robust adaptive filtering;orbit determination
收稿日期:2015-01-25
基金項目:國家自然科學基金項目(41274040,41374019)。
第一作者簡介:任夏(1989—),女,陜西西安人,博士研究生,研究方向為衛星定軌。
中圖分類號:P228
文獻標志碼:A
文章編號:2095-4999(2016)02-0026-04
引文格式:任夏,李鑄洋,丁陽.抗差自適應濾波算法在實時定軌中的應用[J].導航定位學報,2016,4(2):26-28,35.(REN Xia,LI Zhuyang,DING Yang.Application of robust adaptive Kalman filtering on real-tie orbit determination[J].Journal of Navigation and Positioning,2016,4(2):26-28,35.)DOI:10.16547/j.cnki.10-1096.20160206.