高精度UWB/SINS組合室內定位系統研究
2016-06-27 01:24:41劉見輝劉鳳英
導航定位學報 2016年2期
關鍵詞:卡爾曼濾波
劉見輝,王 冬,劉鳳英,王 靜
(1.山東科技大學 測繪科學與工程學院,山東 青島 266590;2.貴州省交通規劃勘察設計研究院股份有限公司,貴陽 550000)
高精度UWB/SINS組合室內定位系統研究
劉見輝1,王冬1,劉鳳英1,王靜2
(1.山東科技大學 測繪科學與工程學院,山東青島266590;2.貴州省交通規劃勘察設計研究院股份有限公司,貴陽550000)
摘要:針對水利工程泥沙沉積規律模擬測量實驗,提出INS和掃描儀相結合的測量系統,同時在該測量系統中又加入了基于UWB的室內定位技術來解決INS誤差積累的問題。通過軌跡發生器和松組合形式的卡爾曼濾波器,對組合定位系統進行模擬仿真。結果表明該組合定位系統中INS和UWB優勢互補,抑制誤差的同時提高了室內定位系統的定位精度。
關鍵詞:UWB;捷聯慣性導航系統;卡爾曼濾波;組合導航;室內定位
0引言
為了研究河流和水庫等水利工程的泥沙沉積規律,許多相關科研機構建立了水利工程泥沙沉積實驗室。這種類型的實驗工作中一個重要工作就是測量河床或者水庫在放水前后的幾何尺寸變化大小,從而建立水利工程的泥沙沉積模型[1-2]。對于水利設施模型的測繪,如果采用水準儀和經緯儀或全站儀,按照傳統的測量方法進行實地測量,會存在諸多問題,比如采樣點分布不連續、精度低、作業時間長、工作量浩大等缺點。特別是在測量過程中,制約了水動力、泥沙沉積的過程研究,直接影響泥沙沉積模型的科學結論。
針對此問題曾有學者提出基于攝影測量的定軌移動掃描系統,但該系統存在諸多不足之處:首先需要大量的像控點,而在像控點的測量中往往存在較大的誤差;其次移動設備的位置具有很大的不確定性,攝影測量設備在軌道上行進的過程中會產生晃動、傾斜問題,特別是在周期性觀測過程中由于姿態、位置的不確定性給后續的解析計算帶來很大不利因素[2]。
由于傳統測量方式對于水利模型測量的種種不適,所以迫切需要研究出一種新的測量方式。在實驗室前幾代研究模型的基礎上提出慣性導航系統(inertial navigation system,INS)與掃描儀相結合的測量方式,用INS提供的位置、姿態信息來實現掃描儀的精確定位。INS可以與全球定位系統(global positioning system,GPS)組合定位;但是由于室內GPS信號質量太差,INS不能如同室外情況下使用GPS/INS組合系統來減小隨時間而逐漸積累增大的定位誤差,無法單獨實現室內精確定位的要求。要實現水利模型的高精度測量,必須為掃描儀提供準確的位置、姿態信息;因此就有了室內情況下精確定位、定姿問題。本文針對這個問題特提出超寬帶與INS相結合的室內定位組合定位系統。
1組合定位系統介紹
超寬帶(ultra-wide band,UWB)以其隱蔽性好、截獲率低、處理增益高、多徑分辨能力強、傳輸速率高、系統容量大、功耗低等特點逐漸引起人們重視,成為無線定位的熱點[3]。UWB信號的這幾種特點,注定了它在室內定位研究上的優勢。因此,基于UWB超寬帶技術的室內定位技術逐漸成為人們的一個研究重點。但是測距信號易受周圍環境影響,特別是非視距傳播(non-line of sight,NLOS)很大程度上降低了系統的定位精度。捷聯慣性導航系統 (strapdown inertial navigation system,SINS)是一種自主式導航定位系統,并且有較高的數據更新率,其主要缺點是隨著時間的積累,本身的誤差將會變大,即只能夠在短時間內保持高精度[4]。本文選擇將慣性導航技術和UWB室內定位技術相結合的組合定位方式,來提高定位精度。
組合定位原理如圖1,系統有2個獨立的測量系統,即SINS和UWB測距設備構成的定位系統:INS采用基于微機電系統(microelectromechanical systems,MEMS)的SINS,實時輸出INS的位置,姿態信息;UWB系統測量移動站到基站的距離,然后通過到達時間差(time difference of arrival,TDOA)算法,進行定位解算獲取移動站的坐標。選取2個系統的位置差值作為觀測量,設計采取松組合方式的擴展卡爾曼濾波器進行解算,將解算出來的結果再反饋給INS,用來保證INS的定位精度。
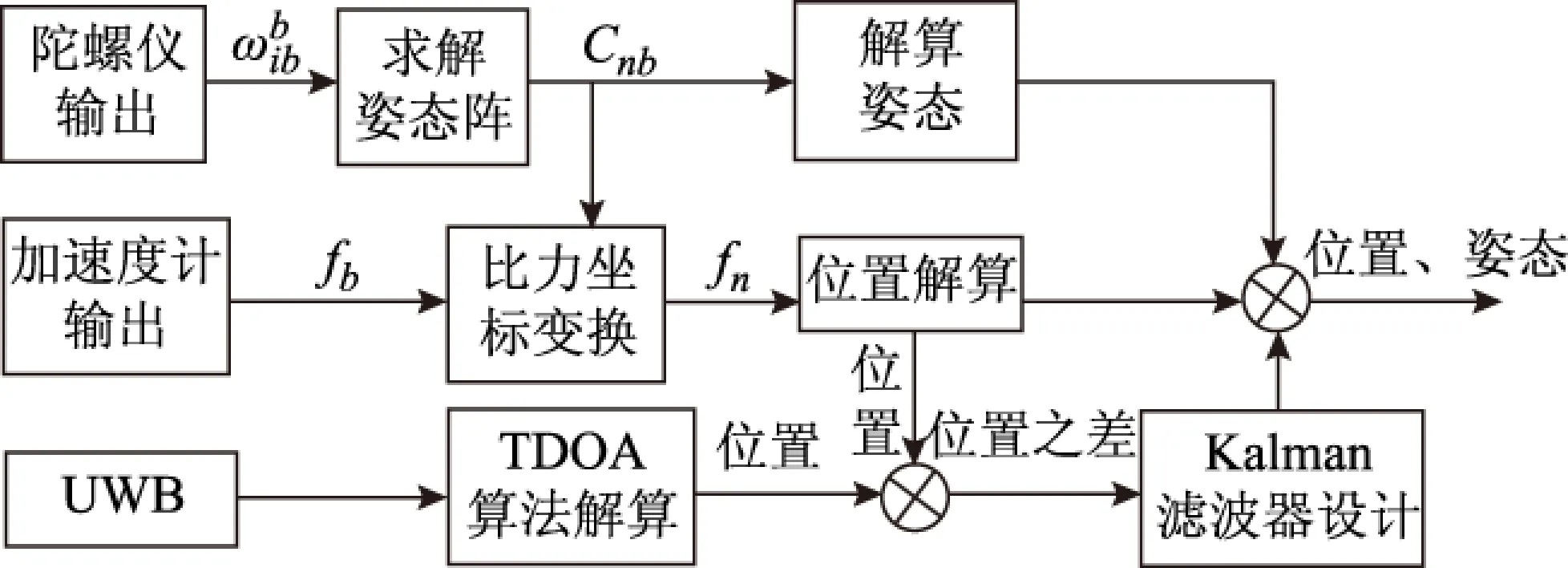
圖1 組合導航定位系統原理
2UWB定位技術
2.1TDOA定位原理
TDOA定位算法的基本思想是測量移動臺發射信號到達不同基站的時間差來計算出一系列距離差,再利用雙曲線的特性——線上的點到2焦點距離之差為定值計算出移動站位置信息[5]。TDOA 定位的雙曲線模型如圖2所示。
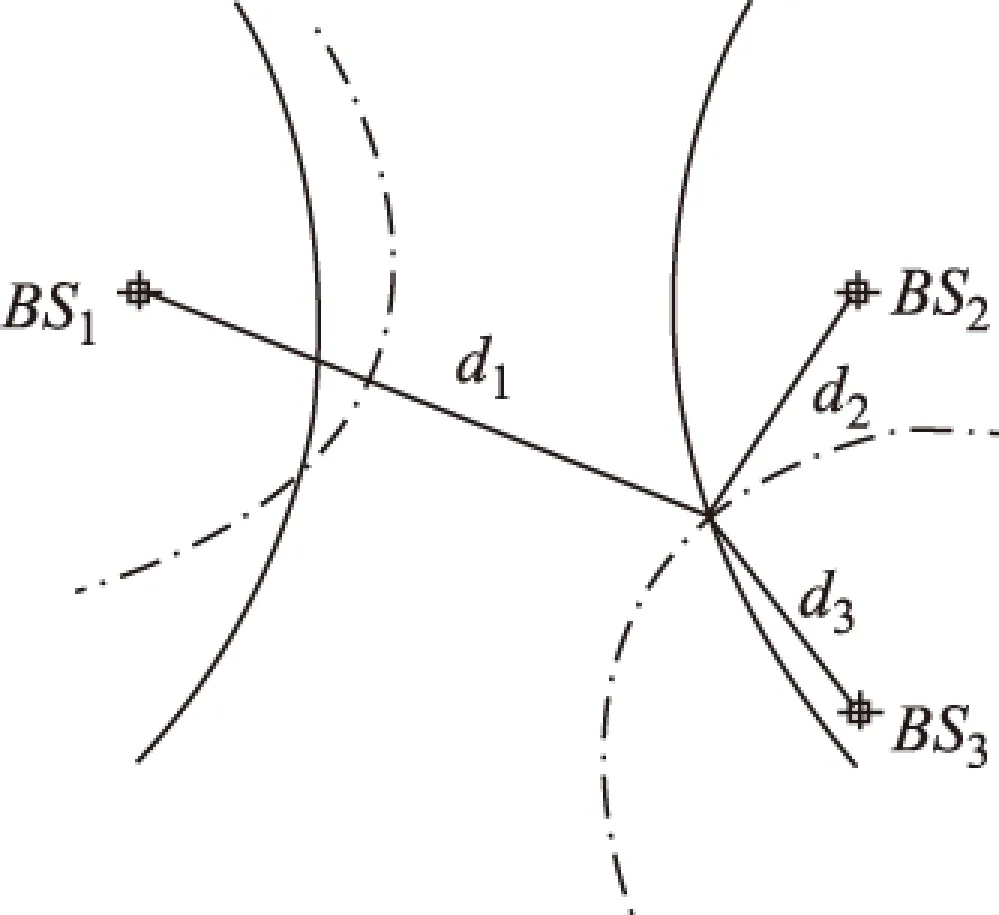
圖2 TDOA定位原理
假設有3個參考節點BS1、BS2和BS3,移動站到各參考節點的距離分別是d1、d2和d3。移動站到BS1和BS2之間的距離差d21=d2-d1,依據雙曲線原理,移動站位于以BS1、BS2為焦點,以d21為焦距的雙曲線上;同理可知移動站也必然位于以BS1、BS3為焦點,以d31為焦距的雙曲線上[6]:因此2條雙曲線的交點就是移動站的位置。需要注意的是,2條雙曲線的焦點會有2個,需要通過先驗信息篩選出正確坐標值。
此外,在2維坐標系里,TDOA定位利用至少4個基站接收到移動站發出的信號來確定移動站的位置坐標,3空間里則至少需要5個參考基站[7]。參考基站的位置很重要,盡量從上下2個方向使基站的覆蓋范圍包圍試驗場,而不要使所有的參考基站都位于同1個平面范圍內。
2.2影響UWB定位精度的因素
影響UWB無線定位精度的個重要因素是在無線電波的傳播過程中,發射機和接收機之間由于障礙物的阻礙會使得信號無法按照直射路徑進行傳播,而只能通過由衍射、折射、反射等方式部分被接收機所接收而產生的NLOS傳播誤差[8];如果應用NLOS情況下得到的測量值對目標進行估計,必然會存在很大的不準確性從而影響到達時間(time of arrival,TOA)或TDOA的定位精度,使得基于TOA或TDOA算法的定位估計成為有偏估計:因此就需要根據需求對測量值進行處理再實施定位。多徑效應和NLOS傳播是影響室內定位精度的主要因素,而采用UWB方式極短時間的窄脈沖則時間、空間分辨率都很強,并且具有較好的多徑分辨率。在定位系統中,如何減小由于NLOS傳播產生的誤差是提高定位精度的關鍵之一[8-9]。
本文采用基于卡爾曼濾波的TDOA定位算法首先對來自不同基站的距離測量值進行濾波處理,采用Wylie方法對含有非視距誤差的距離測量值進行判別或重構;然后使用正弦濾波對使用線性化最小二乘法計算出的移動臺的位置進行處理,從而得到平滑軌跡[10]。
利用Kalman濾波器對相應范圍內各個基站BSi(i=1,2,…,M)與移動臺MS之間的距離值進行處理,其狀態方程與觀測方程為:
X(k+1)=ΦX(k)+Γu(k);
(1)
Z(k)=HX(k)+v(k)。
(2)
v、u為零均值的觀測噪聲和過程噪聲;T為采樣周期;在卡爾曼濾波算法中:
狀態一步預測為

(3)
狀態估計為

(4)
濾波增益為

(5)
一步預測均方誤差為

(6)
估計均方差為
Pk=(I-KkHk)Pk|k-1。
(7)

3誤差模型
3.1SINS誤差模型
陀螺是INS的主要部件之一,SINS的誤差主要來源于陀螺的漂移。短時間內,白噪聲和量化噪聲對角誤差的影響最大[11-12]。陀螺建模誤差包括3項,分別為常值誤差、隨機誤差和一階馬爾科夫過程誤差[9]。陀螺誤差模型為
ε=εe+εr+ωg。
(8)
在組合導航設計中,加速度計誤差模型一般只考慮分量相對較小的偏置誤差i(i=x,y,z)[12-13]。所以加速度計誤差模型為
i=bi+ωai(i=x,y,z)。
(9)
在考慮到SINS測量誤差的同時,還要考慮到儀器本身的誤差,包括儀器刻度誤差、INS元件的安裝誤差等。
3.2UWB測距設備誤差模型
由于本文采用了TDOA算法,各測距設備的常值誤差將抵消;并且通過分析TDOA的定位原理和實驗測量數據可以發現UWB測距設備的噪聲信號的相關性比較小,馬爾科夫相關時間較大,故UWB測距設備的誤差模型為隨機誤差。
3.3Kalman濾波器模型
本文濾波器模型采用在非線性系統中應用最廣的擴展卡爾曼濾波算法。擴展卡爾曼濾波的基本思想是通過對非線性系統進行線性化,并且忽略其高階項誤差,將系統模型轉變為誤差形式的狀態方程和測量方程;然后再利用標準卡爾曼濾波方程對狀態誤差進行估計[14]。
假設非線性的觀測模型為
Z(t)=h(X(t))+V(t),
(10)
式中h(x)為狀態向量的非線性函數,對其進行線性化并寫出離散化形式,則

(11)
經過線性化后的誤差狀態模型和觀測模型可以采用標準卡爾曼濾波方程進行濾波解算[15]。
4系統仿真與結果分析
為了評定組合定位系統的性能,根據學校3D實驗室實際情況本文設置如下仿真環境:仿真目標物運動軌跡如圖3,實驗場地為長150 m、寬10 m的矩形區域,軌跡起始點為(0,3),沿圖中曲線勻速運動,速率為0.3 m/s,運動到點(120,3) 結束,共用時379.26 s;4個基站在矩形區域的4個角上,測量移動站到各個基站的距離為UWB定位解算提供數據源;由微型慣性測量組合(miniature inertial measurement unit,MIMU)組成的微SINS位于移動站上,分別感知載體的角速度和加速度,為INS解算提供數據源。
INS仿真條件與文獻[10]實驗條件一致。UWB測距隨機零偏均方根為0.1 m。設置的3個工作階段,見表1。
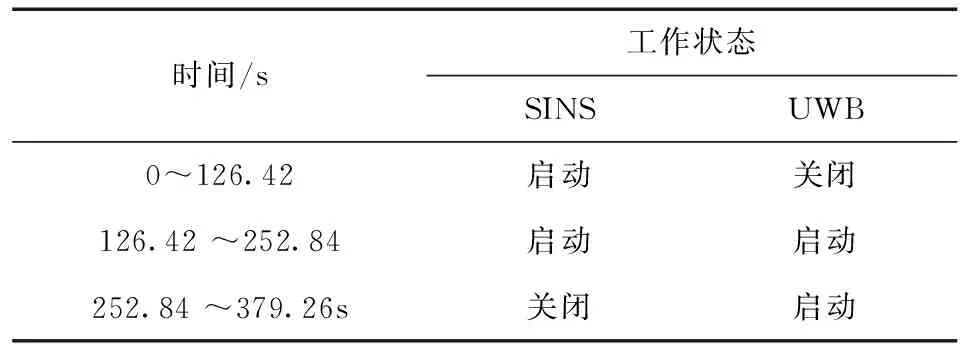
表1 組合定位系統子系統工作狀態
按照以上條件進行仿真,定位效果如圖3,圖4所示。
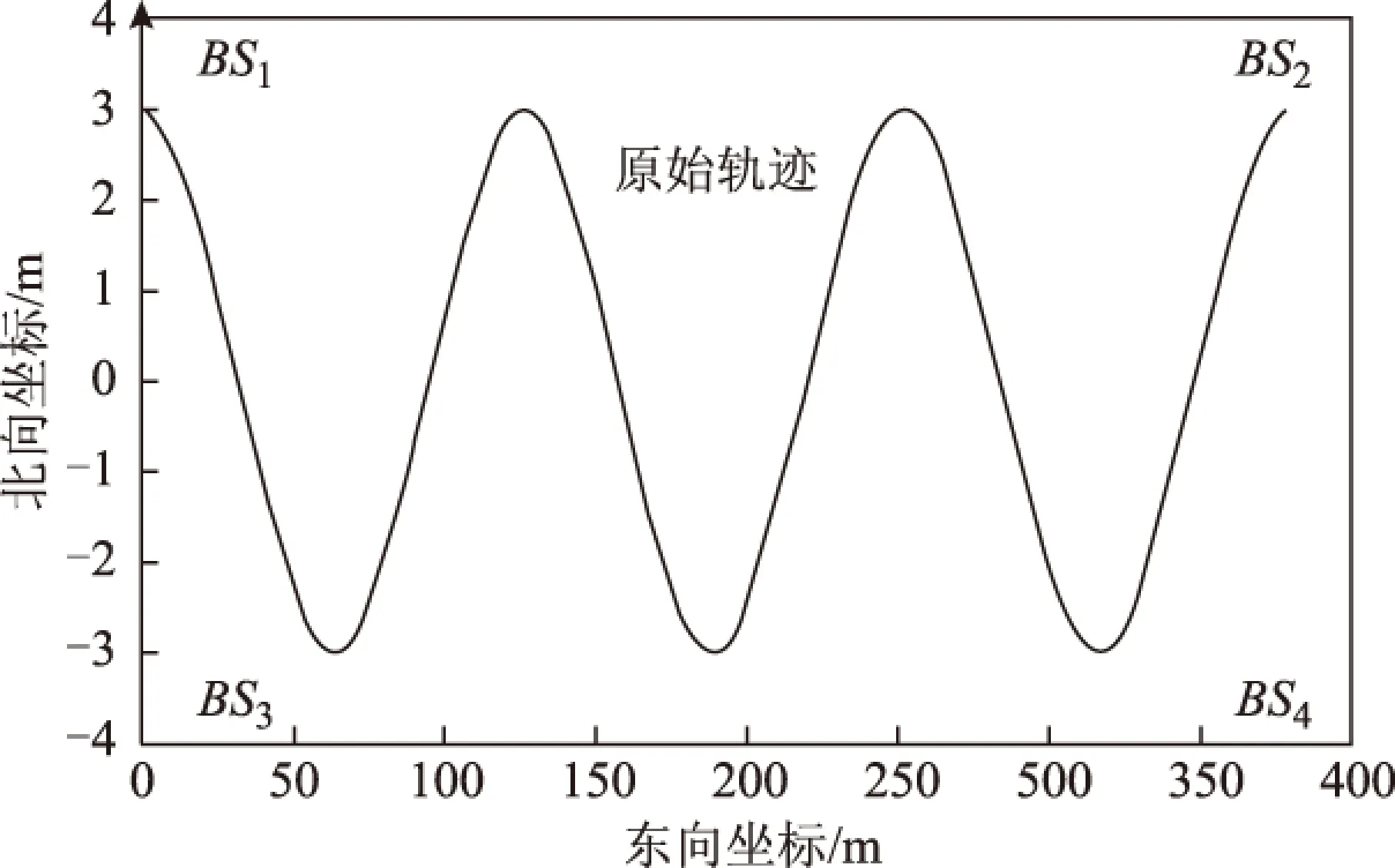
圖3 仿真目標運動路線
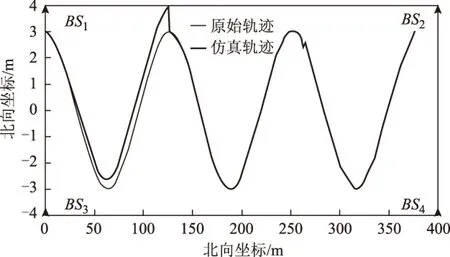
圖4 仿真定位效果
將定位誤差分解成東向和北向2個方向,誤差分布圖如圖5、圖6所示。在第1階段,MINS正常工作,定位軌跡較平滑,但是由于僅僅是MINS在運行,所以INS的定位誤差隨時間逐漸累積,在42.03 s時,定位誤差累積到了1 m;在第2階段,MINS和UWB共同正常工作,2個系統進行組合定位,UWB間斷定位抑制MINS的誤差累計,MINS對UWB進行平滑處理,抑制UWB的信號跳變,將定位精度控制在5 cm左右;在第3階段,MINS出現故障,UWB單獨定位,由于缺乏MINS的平滑處理,UWB的單獨定位出現了較大的波動性。
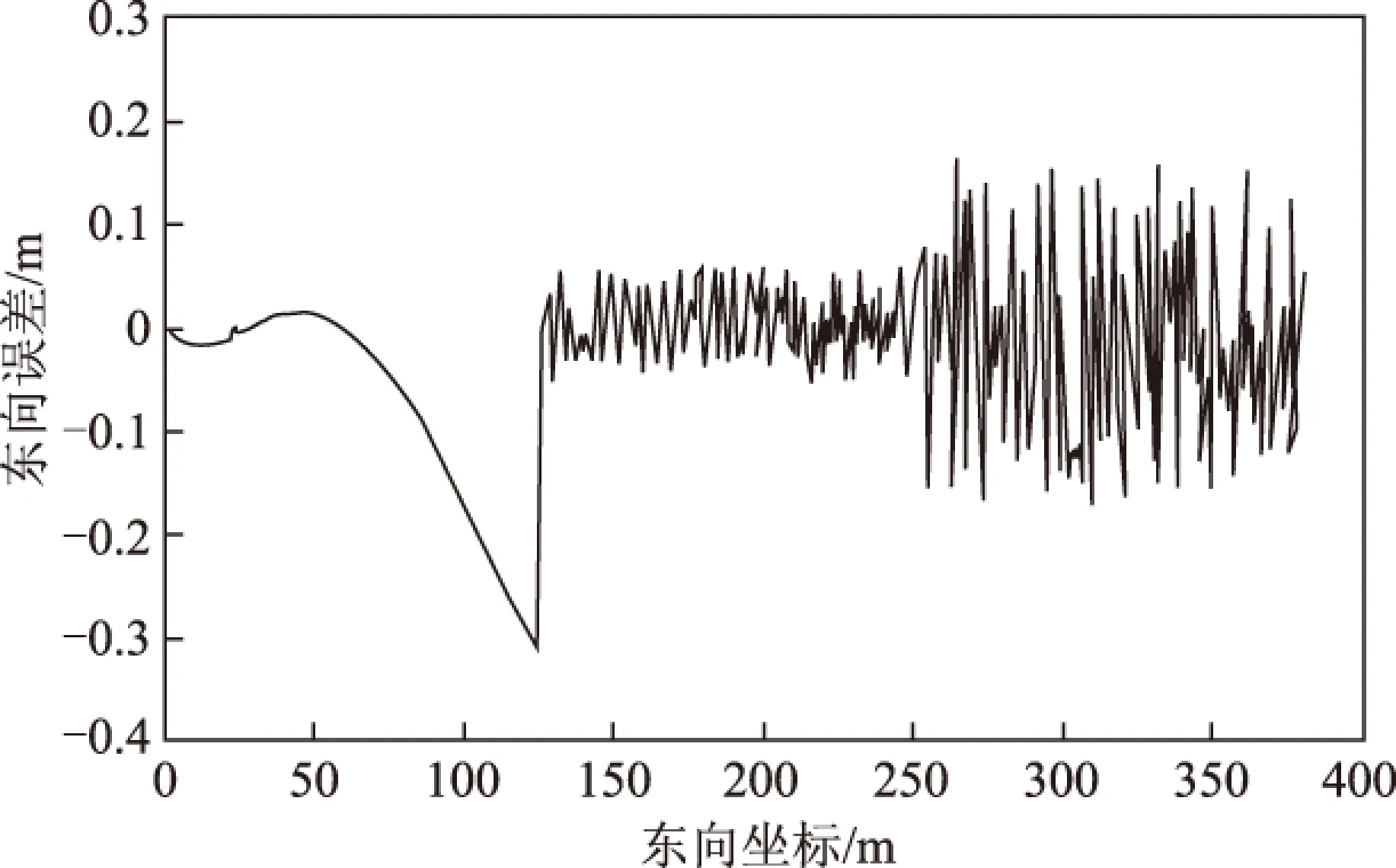
圖5 東向定位誤差曲線
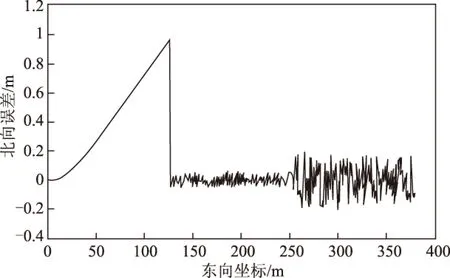
圖6 北向定位誤差曲線
經結果分析,比較3個階段的定位效果可知:第1、3階段當2個子系統單獨工作時定位結果都存在較大的誤差;第2階段當采用INS和超寬帶組合定位時,2個子系統通過互補使定位精度得到很大提高,實現了較高精度室內定位的要求。
5結束語
本文通過構建松組合形式的卡爾曼濾波器,對UWB/INS組合定位系統進行仿真,結果表明此組合系統充分發揮各自的優勢,削弱了INS和UWB系統的自有誤差,大大提高了系統的定位精度。另外,在測距階段,通過提高在NLOS情況下非視距測量值的判別能力和重構能力,優化定位算法,減小采樣周期,可以使定位結果更加準確、平滑。本文所研究的組合定位系統不僅可用于水利模型實驗室,同樣可用于其他類型的對室內定位有較高要求的環境中。
參考文獻
[1]石波,李國玉,景冬,等.基于RFID技術的POS輔助室內定軌移動攝影測量方法研究[J].大地測量與地球動力學,2012,4(32):129-134.
[2]李國玉.室內定軌移動攝影測量控制系統的設計與實現[D].青島:山東科技科技大學,2011:12-14.
[3]陳思,張邦寧,郭道省.超寬帶技術的抗干擾抗截獲性能研究[C]//中國電子學會.軍事電子信息學術會議論文集.武漢:中國電子學會,2006:313-316.
[4]喬洋,趙育善,趙金才.慣性導航/雙星組合導航的可行性研究[J].上海航天,2003,20(4):34-37.
[5]蔚娜.蜂窩網絡中動態選擇基站的無線定位算法[J].現代電子信息技術理論與應用,2005(1):361-364.
[6]杜海兵,王民北.數據融合技術在無線移動定位中的應用[J].計算機工程與應用,2005,6(1):153-155.
[7]海燕,張葡青.無線定位技術的物理基礎及其關鍵技術分析[J].中山大學學報:自然科學版,2005,44(3):42-45.
[8]史巖,朱濤,傅軍.基于WPS/GPS/MIMU組合的無縫定位技術研究[J].計算機測量與控制,2014,22(10):3388-3391.
[9]賀廣宇.UWB高精度定位中的信道估計及均衡技術研究[D].西安:西安電子科技大學,2010:31-34.
[10]傅軍,朱濤,史巖.高精度RNS/SINS組合定位算法研究[J].計算機仿真,2014,31(6):115-119.
[11]楊彬,金毅,高娜.INS軌跡發生器誤差引入研究[J].導彈與航天運載技術,2015(2):102-106.
[12]盧舒勃.民用飛機導航傳感器濾波算法研究[D].上海:上海交通大學,2011:32-36.
[13]王明昊,王仕成,牟建華.SINS/天文組合導航[J].彈箭與制導學報,2009,4(2):87-90.
[14]楊靜,張洪鉞,李驥.預測濾波器理論在INS非線性對準中的應用[J].中國慣性技術學報,2003,12(6):44-52.
[15]李鵬程.組合導航及其濾波算法研究[D].西安:西安電子科技大學,2010:42-45.
Study on indoor locating system of high-accuracy UWB/SINS combination
LIU Jianhui1,WANG Dong1,LIU Fengying1,WANG Jing2
(1.College of Geosciences and Technology,Shandong University of Science and Technology,Shandong Qingdao 266590,China;2.Guizhou Transportation Planning Survey & Design Academy Co.,Ltd.,Guiyang 550000,China)
Abstract:Through the simulation measuring experiment of sediment deposition rule in water conservancy project,this paper puts forward a measurement system which combines inertial navigation with scanner.Meanwhile,the indoor positioning system technology based on the UWB was joined in the measurement system to solve the problem of inertial navigation error accumulation.Then a simulation of combined positioning system was carried out according to the track generator and the loosely coupled integration Kalman filter.The result indicated that the inertial navigation of combined positioning system and UWB would have complementary advantages by depressing the error accumulation and improving the positioning accuracy of indoor positioning system as well.
Keywords:UWB;SINS;Kalman filtering;integrated navigation;indoor positioning
收稿日期:2016-01-05
第一作者簡介:劉見輝(1986—),男,河南周口人,碩士研究生,研究方向為3S集成與應用。
中圖分類號:P228
文獻標志碼:A
文章編號:2095-4999(2016)02-0053-05
引文格式:劉見輝,王冬,劉鳳英,等.高精度UWB/SINS組合室內定位系統研究[J].導航定位學報,2016,4(2):53-56,86.(LIU Jianhui,WANG Dong,LIU Fengying,et al.Study on indoor locating system of high-accuracy UWB/SINS combination[J].Journal of Navigation and Positioning,2016,4(2):53-56,86.)DOI:10.16547/j.cnki.10-1096.20160211.
猜你喜歡
測控技術(2018年11期)2018-12-07 05:49:38
測控技術(2018年12期)2018-11-25 09:37:34
電測與儀表(2017年20期)2017-12-19 05:14:28
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
中國慣性技術學報(2017年1期)2017-06-09 08:15:14
電測與儀表(2016年21期)2016-04-11 12:42:44
電源技術(2016年9期)2016-02-27 09:05:39
江蘇科技大學學報(自然科學版)(2015年4期)2015-12-17 12:42:50
電源技術(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36