疏水表面冷凝的毛細力微操作液滴動態分配
2016-06-28 01:18:18范增華榮偉彬王樂鋒孫立寧
哈爾濱工業大學學報 2016年7期
關鍵詞:分配
范增華, 榮偉彬, 王樂鋒, 孫立寧
(機器人技術與系統國家重點實驗室(哈爾濱工業大學), 哈爾濱 150080)
疏水表面冷凝的毛細力微操作液滴動態分配
范增華, 榮偉彬, 王樂鋒, 孫立寧
(機器人技術與系統國家重點實驗室(哈爾濱工業大學), 哈爾濱 150080)
摘要:為實現毛細力操作液滴獲取,提出基于疏水表面冷凝的毛細力微操作液滴分配方法,研究微對象轉移進程中(拾取-釋放)所需的操作液滴條件. 針對操作液滴分配任務,建立液橋拉伸進程中的模型. 基于VOF(volume of fluid)方法,建立平面-平面、平面-球面配置模式下的動態模型,分析操作液滴的動態獲取過程. 仿真結果表明:接觸角和提升速度均對輔助液滴的獲取率和斷裂距離起到重要作用,液滴趨向于接觸角小的端面,提升速度可促使液滴在兩平面均分. 液橋體積對輔助液滴獲取率的影響較小,液橋斷裂距離與液橋體積成正比變化. 實驗研究了平面-平面、平面-球面配置下的操作液滴動態分配進程,驗證了所提出方法的可行性.
關鍵詞:微操作;毛細力;液滴;動態液橋;分配
可靠、無損、柔順的微對象轉移方法是微操作機器人的關鍵技術[1-4],基于操作液滴的毛細力微對象操作方法具有特有的柔順性[5-8],能夠避免微對象操縱中產生的表面應力集中,避免潛在的破壞和操作失效. 基于毛細力操作的微液滴獲取方式可概括為3種:蘸取式[9],毛細管式[10]和浸潤式. Obata等[11]提出利用操作探針分配后的液滴作為拾取介質,用于抓取微對象,并在待釋放位置分配輔助液滴用于輔助釋放,從理論角度證明了所提出方案的可行性. Wang等[12]利用毛細管末端產生的彎月面實現微對象的柔順拾取和轉移,需添加外源供液裝置提供毛細管路液體,并通過外源壓力調節毛細管末端彎月面的形態. Fuchiwaki等[13]通過將操作探針浸潤在液體管道內,利用探針伸出管道后的末端殘留液滴作為毛細力夾持的操作液滴條件,但只能被動地改變操作探針的尺寸和形狀來獲取所需操作液滴.
為實現操作液滴的分配,在前述疏水表面冷凝的毛細力柔順拾取方法研究工作的基礎上[14-15],本文提出基于疏水表面冷凝的毛細力微操作液滴分配方法. 確立毛細力操作液滴分配的實施方案,建立了操作液滴分配模型,并對分配過程進行VOF動態求解,分析影響操作液滴獲取能力的因素. 最后通過實驗驗證所提出方法的可行性.
1疏水表面冷凝的毛細力操作液滴分配原理
毛細力操作液滴的分配在拾取階段對應于操作探針上的拾取液滴,在基于液滴的輔助釋放階段則是指分配在基底上的輔助液滴. 疏水表面冷凝的毛細力操作液滴分配的基本原理如圖1所示. 經過表面刻蝕和氟化處理的操作探針具有疏水功能,一方面有利于產生橢球形液滴;另一方面可保證初始分配液滴在微操作探針端面的穩定性[16],避免發生側移.
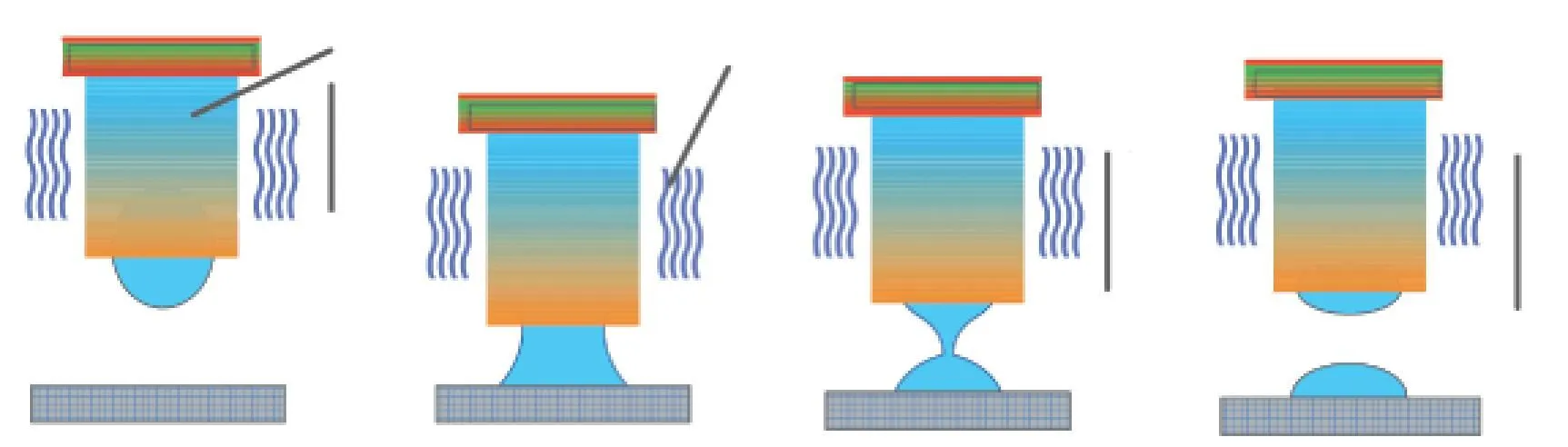
(a)初始形成 (b)接觸基底 (c)液橋拉伸 (d)分配完成
在制冷模塊的作用下操作探針端面冷凝產生初始分配液滴,如圖1(a)所示. 冷凝初始液滴形成后,操作探針下移直至與操作基底接觸,并形成液橋,如圖1(b)所示. 待液橋穩定后,操作探針以一定的速度提升,拉伸液橋,如圖1(c)所示. 液橋繼續拉伸,直至其斷裂,此時可在操作探針和操作基底分配相應體積的操作液滴,如圖1(d)所示. 操作基底上分配的液滴相對于分配前的冷凝液滴比為基底分配液滴的獲取率. 該操作液滴的獲取方式不需外源輔助裝置,且可實現整個操作進程中微液滴的控制,保證了毛細力操縱中微液滴的獲取需求.
2操作液滴分配模型
以曲率半徑分別為R1和R2的操作基底和操作探針間的液橋為分析對象,研究基底輔助液滴的獲取能力,圖2為液橋斷裂時的模型示意圖.

圖2 分配液橋斷裂模型
液橋兩端的極限位置坐標分別為(0,y1)和(x2,y2),斷裂點的坐標為(xc,yc),斷裂距離為s. 若操作基底和操作探針末端輪廓等效為球形,則左右兩側的體積v1、v2分別為
式中:h1、h2分別為液橋包圍左右對象的球缺高度,Y1(x)、Y2(x)分別為左右液橋輪廓方程.
判斷液橋斷裂的準則,可用斷裂點前后液橋表面積相等判定,即液橋的表面積與分離后兩對象上獲取液滴的表面積之和相等,可表示為
式中:dc為液橋斷裂距離,S1和S2分別為斷裂后兩液滴的表面積.
基底輔助液滴的獲取率vratio表示分配后基底占有操作液滴的能力,可表示為
本文采用基于VOF(Volume of Fluid)的方法求解氣-液界面動態變化,分析液橋的動態斷裂過程. 在Fluent環境下建立液橋的多相流VOF模型,仿真分析毛細力操作液滴獲取的動態變化過程. VOF求解下的守恒方程為

液橋在操作探針與基底間形成,待液橋穩定后,操作探針施加分離速度v,直至液橋被拉斷. 液橋分離過程中,待分配輔助液滴的基底約束為固定端面. 本文針對微操作探針-操作基底的配置方式,建立了相應的平面-平面和平面-球面動態模型,進行毛細力操作液滴獲取能力的影響因素分析. 圖3為兩平面間毛細力操作液滴的動態分配過程,主要包括液橋的初始化和液橋的動態拉伸. 示例中的液體介質為去離子水,探針和操作基底與拉伸液體介質的接觸角均為30°,拉伸速度為0.1 m/s,液體的體積為50 pL.
隨著初始化進程的進行,氣液界面不斷進化,直至滿足所設置的參數條件,在t=1.9e-4 s時達到平衡. 初始化進程完成后,采用動網格(Dynamic Mesh)方法對初始化后的液橋進行拉伸操作,以此分析操作液滴的獲取能力. 在t=2.7e-4 s時液橋斷裂,操作探針和基底分別獲取相應體積的液滴. 通過基于VOF模型的液橋動態模擬方法,能夠映射液橋形成及拉斷進程中的液橋輪廓的變化,為進一步分析毛細力操作液滴的獲取能力提供了必要前提條件.

t=0 s t=2.5e-6 s t=1.9e-4 s t=2.6e-4 s t=2.7e-4 s t=2.8e-4 s
圖3操作液滴動態分配過程
3 操作液滴動態分配分析
3.1平面-平面配置動態分配
動態仿真結果分析中,液橋的體積、斷裂距離等參數均對操作探針的半徑(R=100 μm)進行量綱一化處理,量綱一的體積用V表示.
3.1.1操作探針接觸角的影響
操作基底的接觸角θ1=45°,在此基礎上變化操作探針的固-液接觸角θ2,圖4為操作探針接觸角對輔助液滴獲取率和斷裂距離的影響. 隨著操作探針接觸角的增加,操作基底上輔助液滴的獲取率增加. 同時,液橋的斷裂距離則是先增大后減小,兩接觸角相等時(θ1=θ2=45°),斷裂后的液橋基本均分,且斷裂距離最大.

(b) 斷裂距離
3.1.2提升速度的影響
圖5分析了提升速度對基底輔助液滴獲取能力的影響. 實驗結果表明,當θ2<θ1(θ1=45°,θ2=40°)時,輔助液滴的獲取率在初始階段隨著提升速度的增大而增加,隨后逐步趨向平衡;斷裂距離則一直增大. 相反,當θ2>θ1(θ1=45°,θ2=50°)時,基底輔助液滴的獲取率則隨著提升速度的增大而減小,并趨于平衡;但斷裂距離則與提升速度成正比變化,如圖5 (b) 所示. 兩端面接觸角的變化主導了不同提升速度下輔助液滴獲取率的變化趨勢,促使操作液滴在兩表面均分.

(a) 輔助液滴獲取率

(b) 斷裂距離
3.1.3液橋體積的影響
圖6所示為不同液橋體積對輔助液滴獲取能力的影響. 相差5倍體積的液橋,在提升速度0.01 m/s時,其輔助液滴獲取率相近,沒有顯著性影響,斷裂距離則與液橋體積成正比變化.
(a) 輔助液滴獲取率

(b) 斷裂距離
3.2平面-球面配置動態分配
3.2.1基底曲率半徑的影響
圖7為基底曲率半徑對輔助液滴獲取率和斷裂距離影響的動態仿真結果.
(a) 輔助液滴獲取率
(b) 斷裂距離
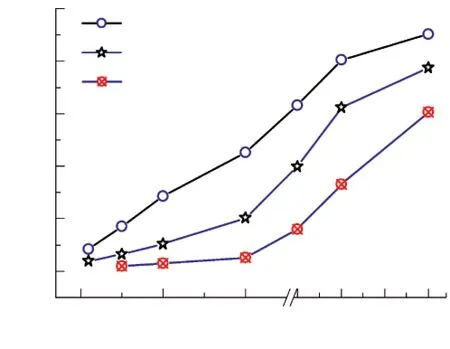
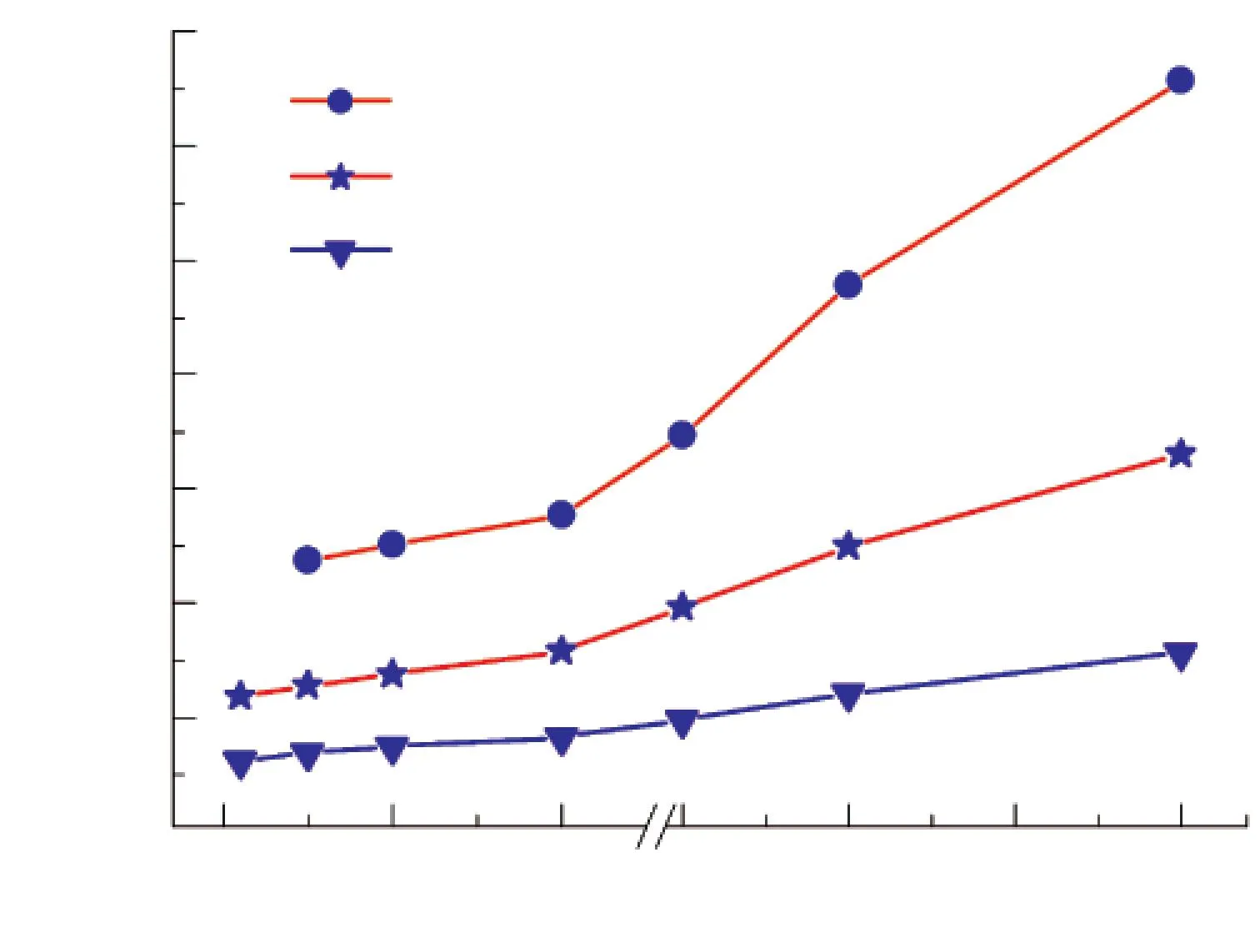
斷裂距離通過分別相對應的曲率半徑(Rs)進行量綱一化. 在均等固-液接觸角的情況下(θ1=θ2=60°),基底的曲率半徑越大,輔助液滴的獲取率持續增加. 與此同時,液橋的斷裂距離則隨著曲率半徑的增大而減小,如圖7 (b)所示,且操作基底半曲率徑越小,提升速度對斷裂距離的影響越大.
3.2.2基底接觸角的影響
動態模擬進程中,操作探針的接觸角恒為50°,基底的曲率半徑Rs=0.1 mm,液橋的量綱一的體積V=0.05. 動態仿真結果表明(圖8),隨著操作基底接觸角的增大,輔助液滴的獲取率逐漸減小. 液橋斷裂距離的最大值并非發生在兩接觸角相等處(θ1=θ2),因為操作基底曲率梯度產生的影響,故其實際接觸角包括表征接觸角和基底曲率引起的傾斜度. 在所述參數條件下,其最大斷裂距離發生在θ1=30°處,且較大的提升速度對應大的斷裂距離.

(a) 輔助液滴獲取率
(b) 斷裂距離
動態分配仿真結果表明:接觸角和提升速度對操作液滴的分配具有顯著影響,直接影響了初始液滴在基底上分配輔助液滴的能力. 動態分配過程中,兩對象間的液橋趨向接觸角小的端面,提升速度的增大則使斷裂后的液橋趨向均分.
4操作液滴分配實驗
4.1實驗裝置
在操作液滴分配動態模擬研究的基礎上,構建操作液滴分配實驗裝置. 主要包括六自由度電動平臺、光學顯微鏡、溫度傳感器、加濕器、溫度控制模塊、探針夾具、制冷片和水冷組件. 六自由度電動平臺實現操作進程中的精密位姿調整;相互垂直安裝的光學顯微鏡可實時獲取動態分配中的液滴信息;加濕器、溫度傳感器和溫度控制模塊共同控制冷凝環境條件;制冷片和水冷組件提供制冷源;探針夾具固定冷凝操作探針. 通過上位機控制,可實現操作液滴分配實驗中的液滴形成和動態分配.
4.2操作液滴動態分配實驗
圖9為平面-平面配置方式下操作液滴的分配過程,上位機控制制冷模塊和環境濕度可實現操作探針末端冷凝液滴的獲取,作為初始待分配液滴,如圖9(a)所示. 操作探針下移,直至冷凝液滴與待分配輔助液滴的基底接觸,兩對象間形成液橋,如圖9(b)所示. 液橋穩定后,操作探針上移拉伸液橋,如圖9(c)所示. 液橋最終斷裂,并實現液滴在基底上的分配,如圖9(d)所示. 該動態分配過程中操作探針的提升速度為50 μm/s,液橋與探針和基底的接觸角分別為70°和53°. 實驗結果表明基底分配液滴的占有率達到90%,因為基底的接觸角小,且提升速度較小,故拉斷后的液滴大部分趨向基底面. 與前述仿真分析中接觸角的主導作用效果一致.

(a)液滴形成 (b)液橋形成 (c)液橋拉伸 (d)液橋斷裂
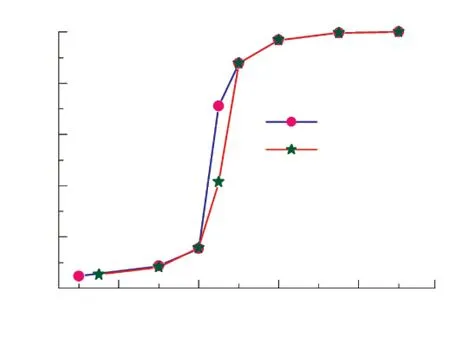
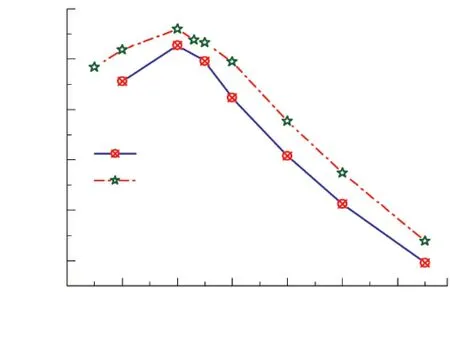
圖10為提升速度對基底輔助液滴獲取率的影響. 實驗結果表明,基底輔助液滴的獲取率隨著提升速度的增大而減小,斷裂后的液橋趨向均分(基底輔助液滴的獲取率為0.5). 實驗結果的變化趨勢與圖5(θ2>θ1)中仿真分析結果一致.

圖10 提升速度對基底輔助液滴獲取率的影響
雖然提升速度可控制分配后的基底輔助液滴獲取率,但當兩接觸角相等,即液橋兩端的材料屬性一致時,提升速度的改變不會影響動態分配后的操作液滴占有比,初始分配液滴則均分在兩端面上. 由圖11中不同提升速度下的實驗結果可知(液滴在兩端面的接觸角θ1=θ2=40°),初始分配液滴基本均分在兩接觸端面,與動態仿真實驗結果一致. 且由圖11(a)液橋斷裂前的輪廓信息可知,液橋凹月面上下對稱分布,斷裂點在液橋中心處.

(a) v=10 μm/s (b) v=50 μm/s (c) v=500 μm/s
雖然在均等接觸角下提升速度對操作液滴的分配率沒有影響,但由圖11斷裂瞬間的圖像信息可知,斷裂距離隨著拉伸速度的增加而增大. 此外,液橋體積對斷裂距離具有主導作用,圖12為操作探針的提升速度50 μm/s下,不同初始液滴體積對液橋斷裂距離的影響. 實驗結果表明,斷裂距離隨著液橋體積的增加而增大,與圖6的動態仿真分析結果一致.

圖12 液橋體積對斷裂距離的影響
此外,針對平面-球配置方式進行了操作液滴的分配實驗研究,如圖13所示,直徑500 μm的微球對象膠粘在基底平面上. 操作探針和微球對象間形成液橋(圖13(a));操作探針以200 μm/s的提升速度拉伸液橋,圖13(b)為液橋斷裂前的輪廓信息,液橋斷裂點靠近微球處;斷裂后分配在微球上的液滴微小(圖13(c)),且在室溫下快速消失. 因為球體表面曲率對液橋接觸角產生較大影響,如圖13(a)中的球面實際接觸角約為123°,遠大于該時刻下的探針接觸角53°,故斷裂后的液橋幾乎不能分配在球面基底上,與動態仿真結果一致.

(a)液橋形成 (b) 斷裂前 (c) 分配后
操作液滴的動態分配實驗表明,疏水表面冷凝的毛細操作液滴動態分配方法可實現液滴的可靠分配,通過控制接觸角、提升速度和液橋體積可實現對基底分配液滴量的控制. 實驗和動態仿真研究中參數影響的一致性證明了基于VOF法的液滴動態分配模擬的有效性.
5結論
1)本文提出一種疏水表面冷凝的毛細力操作液滴分配方法,通過冷凝控制獲取初始操作液滴,保證了毛細力操作液滴分配所需的先決條件,可實現基底輔助液滴的分配.
2)針對操作液滴的分配,基于VOF計算方法模擬液橋的拉斷進程,并以基底輔助液滴的獲取率分析動態分配后操作液滴的獲取能力. 建立了平面-平面、平面-球面模式下的動態液橋進化模型,分析了接觸角、提升速度、液橋體積等因素對基底輔助液滴獲取率和斷裂距離的影響. 實際接觸角的差異對基底輔助液滴獲取率影響較大,液橋趨向接觸角較小的端面,最大斷裂距離發生在兩接觸角相等處. 提升速度增大促使斷裂后的液橋趨向均分,斷裂距離則一直增大.
3)構建實驗平臺,完成了所提出方法的動態實驗分析,可實現操作液滴的分配. 分配后的液滴趨向接觸角小的端面,提升速度的增大促使分配在兩表面的液滴均分,與動態仿真結果一致,驗證了所提出方法的可行性和有效性. 下一步將改變基底表面曲率半徑和操作探針形狀,開展進一步的實驗研究.
參考文獻
[1] WASON J D, WEN J T, GORMAN J J, et al. Automated multiprobe microassembly using vision feedback[J]. IEEE Transactions on Robotics, 2012, 28(5): 1090-1103.
[2] LI X, CHEAH C C, HU S, et al. Dynamic trapping and manipulation of biological cells with optical tweezers[J]. Automatica, 2013, 49(6): 1614-1625.
[3] CHEN Haoyao, SUN Dong. Moving groups of microparticles into array with a robot-tweezers manipulation system[J]. IEEE Transactions on Robotics, 2012, 28(5): 1069-1080.[4] LENDERS C, GAUTHIER M, COJAN R, et al. Three-DOF microrobotic platform based on capillary actuation[J]. IEEE Transactions on Robotics, 2012, 28(5): 1157-1161.[5] DOPFER D, PALZER S, HEINRICH S, et al. Adhesion mechanisms between water soluble particles[J]. Powder technology, 2013, 238: 35-49.
[6] FANTONI G, HANSEN H N, SANTOCHI M. A new capillary gripper for mini and micro parts[J]. CIRP Annals-Manufacturing Technology, 2013, 62(1): 17-20.
[7] AL A A, JAGTIANI A, VASUDEV A, et al. Soft microgripping using ionic liquids for high temperature and vacuum applications[J]. Journal of Micromechanics and Microengineering, 2011, 21(12): 125025-125032.
[8] VASUDEV A, ZHE J. A capillary microgripper based on electrowetting[J]. Applied Physics Letters, 2008, 93(10): 103503-103505.
[9] LUTFURAKHMANOV A, LOKEN G K, SCHULZ D L, et al. Capillary-based liquid microdroplet deposition[J]. Applied Physics Letters, 2010, 97(12): 124107-124109.
[10] LAMBERT P, SEIGNEUR F, KOELEMEIJER S, et al. A case study of surface tension gripping: the watch bearing[J]. Journal of Micromechanics and Microengineering, 2006, 16(7): 1267-1276.
[11]OBATA K J, MOTOKADO T, SAITO S, et al. A scheme for micro-manipulation based on capillary force[J]. Journal of Fluid Mechanics, 2004, 498: 113-121.
[12]WANG Lefeng, CHU Zhaoqi, FAN Zenghua, et al. Simulation of liquid meniscus and microdrop formation of a capillary gripper for microparts transfer[J]. Advanced Materials Research, 2014, 971: 915-919.
[13]FUCHIWAKI O, KUMAGAI K. Development of wet tweezers based on capillary force for complex-shaped and heterogeneous micro-assembly[C]//2013 IEEE International Conference on Intelligent Robots and Systems. Tokyo: IEEE, 2013: 1003-1009.[14] 范增華, 榮偉彬, 王樂鋒, 等. 疏水表面冷凝的可控毛細力微對象操作方法與實驗[J]. 機器人, 2015, 37(6): 648-654.
[15] FAN Zenghua, WANG Lefeng, RONG Weibin, et al. Dropwise condensation on a hydrophobic probe-tip for manipulating micro-objects[J]. Applied Physics Letters, 2015, 106(8): 084105-084108.
[16] FAN Zenghua, RONG Weibin, WANG Lefeng, et al. A single-probe capillary microgripper induced by dropwise condensation and inertial release[J]. Journal of Micromechanics and Microengineering, 2015, 25(11): 115011-115020.
(編輯楊波)
Dynamic distribution of capillary microdroplet using water condensation on hydrophobic surface
FAN Zenghua, RONG Weibin, WANG Lefeng, SUN Lining
(State Key Laboratory of Robotics and System (Harbin Institute of Technology), Harbin 150080, China)
Abstract:A microdroplet distribution method based on water condensation on hydrophobic surface is presented to obtain micromanipulation droplet for capillary gripping. Accordingly, the droplet condition required in micro-objects transfer (pick-and-place) is investigated. Model of liquid bridge stretching is established during microdroplet dispensing. Two configurations (plane-plane, plane-sphere) of dynamic liquid bridge is modeled using VOF (Volume of Fluid) method to analyze the acquisition process of capillary micromanipulation droplet. Simulation results demonstrate that the contact angle and drawing velocity have a significant influence on the acquisition fraction of auxiliary droplet and rupture distance. The initial liquid bridge moves toward the surface with small contact angle after the formed liquid bridge rupture. Micromanipulation probes with big drawing velocity enable manipulation droplet to split on two surfaces equally. The impact of droplet volume on the acquisition fraction of auxiliary droplet is relatively small, but is proportional to the rupture distance. Configurations (plane-plane, plane-sphere) of dynamic liquid bridge are experimental investigated to verify feasibility of the proposed method.
Keywords:micromanipulation; capillary; droplet; dynamic liquid bridge; dispensing
doi:10.11918/j.issn.0367-6234.2016.07.002
收稿日期:2016-01-05
基金項目:國家自然科學基金創新研究群體科學基金(51521003); 機器人技術與系統國家重點實驗室(哈爾濱工業大學)自主研究課題(SKLRS201602C)
作者簡介:范增華(1986—),男,博士研究生; 榮偉彬(1972—),男,教授,博士生導師;孫立寧(1963—),男,博士生導師,長江學者特聘教授
通信作者:榮偉彬,rwb@hit.edu.cn
中圖分類號:TP24
文獻標志碼:A
文章編號:0367-6234(2016)07-0014-06
猜你喜歡
天水行政學院學報(2022年4期)2022-11-18 09:02:36
艦船科學技術(2022年13期)2022-08-11 09:30:02
鐵道通信信號(2020年9期)2020-02-06 09:15:22
漢語世界(The World of Chinese)(2019年3期)2019-07-01 02:37:48
數學大王·趣味邏輯(2019年5期)2019-06-13 20:27:43
小學科學(學生版)(2019年5期)2019-05-21 01:00:18
中學生數理化·中考版(2018年10期)2018-12-07 00:44:52
經濟技術協作信息(2018年30期)2018-11-22 06:20:24
中央社會主義學院學報(2017年1期)2017-04-16 05:34:07
中國衛生(2014年12期)2014-11-12 13:12:40