水下高速直線運動目標的雙參考源航跡估計方法研究
2016-07-01 09:15:41王謙侯宏尹韶平陳志菲西北工業大學航海學院陜西西安7007中國船舶重工集團公司第705研究所陜西西安70075中國科學院聲學研究所北京0090
兵工學報 2016年4期
王謙,侯宏,尹韶平,陳志菲(.西北工業大學航海學院,陜西西安7007;.中國船舶重工集團公司第705研究所,陜西西安70075;.中國科學院聲學研究所,北京0090)
?
水下高速直線運動目標的雙參考源航跡估計方法研究
王謙1,侯宏1,尹韶平2,陳志菲3
(1.西北工業大學航海學院,陜西西安710072;2.中國船舶重工集團公司第705研究所,陜西西安710075;3.中國科學院聲學研究所,北京100190)
摘要:針對噪聲源識別中水下近場高速直線運動目標的航跡估計問題,將雙脈沖源方法擴展到三維空間中。該方法利用公垂線最小化,將基線定位方法估計的兩個連續波脈沖參考源的定位結果投影到二維平面內,并結合已知的雙參考源間距等信息構造航跡參數的目標函數,進而利用遺傳算法估計三維空間內直線運動目標在各脈沖輻射時刻下的位置和航速。仿真結果表明,0 dB條件下當航向角和俯仰角均在[-40°,40°]內時,其估計偏差均在3. 8°以內,而正橫距離和深度差的估計偏差在5. 9 m以內。水庫實驗進一步驗證了該方法的有效性。
關鍵詞:聲學;參數估計;直線航跡估計;雙脈沖源;基線定位
侯宏(1966—),男,教授,博士生導師。E-mail:houhong@ nwpu. edu. cn
0 引言
對水下航行器等高速水下運動目標進行噪聲源識別時,需要預估其航跡以便對輻射噪聲解多普勒[1 -3],從而將動態噪聲信號還原成靜止聲源進行處理。精確的航跡估計不僅有利于解多普勒,也便于根據加裝在水下航行器上的已知參考源位置,解算噪聲源識別結果在水下航行器的對應位置。
在運動目標噪聲源識別時,陣列與航跡相距較近,此時多采用時頻分析方法或基線定位法估計航跡[4]。對于勻速直線運動目標,其時頻曲線參數與航跡參數間有較明確的對應關系,因此時頻分析方法,如利用Hough變換提取LOFAR譜圖中拋物線參數,或者估計瞬時頻率,可以反推航跡信息。時頻分析方法僅需要單個陣元,但是信噪比門限較高,非勻速直線運動情況下時頻參數的解讀較為困難。基線定位方法根據參考源輻射信號到達各陣元的時延差來定位目標,它又分為同步脈沖和異步脈沖定位法。前者需要參考源和接收端的時鐘同步到世界標準時間,后者與三子陣法原理相似,通過構造包含目標坐標和輻射時刻的超定方程進行定位[5 -6]。同步脈沖法對時鐘要求較高,異步脈沖法降低了硬件要求,但是定位精度相對較差。整體上基線定位方法相對成熟,實際工程中應用廣泛。
現有研究大多將水下航行器等運動目標看成分布式點源,在二維平面內作勻速直線運動。而實際中由于測噪船的漂移和水聽器陣列的吊放深度等因素,水下航行器航跡與陣列的幾何關系需要在三維空間中描述,并且水下航行器實航時是一個加速、勻速到減速的運動過程。文獻[7]中雙脈沖參考源(DPS)方法通過在目標上加裝兩個脈沖參考源,增加了雙源間距這個條件,從而提高了二維空間中異步脈沖法的定位精度,并且該方法適用于非勻速直線運動目標。本文重新定義了DPS方法中的雙源間距(DSS)算子和聲程差(PD)算子,并增加公垂線長度(CPL)最小化條件,從而將DPS方法擴展到了三維空間。
1 算法的提出
1. 1 問題的提出
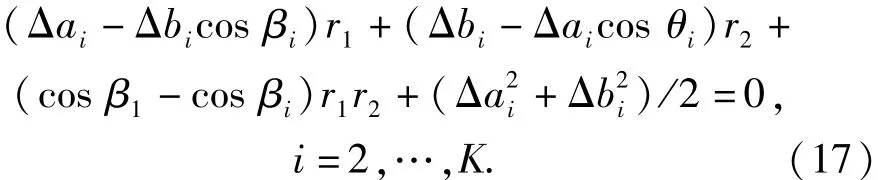
如圖1所示,假設陣列位于Oxz平面內,空間直線航跡PQ在Oxy平面的投影PU與x軸的夾角為航向角θ(取值范圍(-π/2,π/2)),PQ與PU的夾角為俯仰角φ(取值范圍(-π/2,π/2)),PU與y軸交點U的y坐標為正橫距離R0(R0>0),航跡與U點的垂直距離UQ為深度差H0,這樣航跡參數(θ,φ,R0,H0)就確定了空間直線航跡。本文假定目標在水下作直線運動,平面陣從測噪船垂直吊放入水,由于測噪船起伏漂移等因素使得航跡與陣列出現圖1所示情形。
圖1 加裝雙參考源的直線運動目標Fig. 1 Linear moving target with double reference source
假設目標上有兩個間距為r0的同時輻射連續波脈沖信號的參考源A和B,輻射周期均為Tc,載頻不同且都位于噪聲源識別分析頻帶以外。對接收信號濾波后可分離兩個連續波脈沖信號。對于某個連續波脈沖[8]有

式中:c為聲速;M為陣元數。Sm=(xm,ym,zm)和tm分別是第m個陣元的空間坐標和其接收到的脈沖信號前沿到達時刻,(xs,ys,zs)和ts則分別是聲源輻射該脈沖時的空間坐標和輻射時刻。(1)式中,xs、ys、zs和ts未知,陣元坐標Sm已知,脈沖前沿到達時刻tm可由接收信號的時域處理得到。當M>4時,(1)式成為超定方程組,從而可以解得聲源坐標(xs,ys,zs)和輻射時刻ts.與文獻[7]類似,利用不同時刻下基線定位方法得到的參考源的定向結果和輻射時刻,可以構造目標函數來估計航跡參數(θ,φ,R0,H0)。
1. 2 DPS方法
脈沖基線定位方法的測向精度較高,而測距結果波動較大。DPS方法僅利用其測向結果,使得基線定位結果分布于坐標原點和真實航跡直線所確定的航跡平面內,因此,該擬合平面包含的角度及深度等信息計算結果較為精確。由于基線定位算法的測距精度較差,導致水平定位結果精度較差。本文中DPS方法結合已知的雙參考源間距等約束條件來改善其水平定位結果,構造了DSS和PD兩個目標函數,并取它們的乘積作為DPS的目標函數來估計航跡參數。
1. 2. 1 將DSS算子擴展到三維空間中
圖2中假定Ek和Fk是第k個雙脈沖周期下兩個參考源的基線定位結果,二維空間內OEk和OFk這兩條定向直線與航跡相交,兩個交點的間距可直接作為雙參考源間距r0的估計值^r0k.三維空間中定向直線OEk與航跡通常是異面直線,同樣,OFk和航跡直線也是如此;并且,多個脈沖時刻下估計結果在任意平面的投影點E1、E2、E3…通常不在一條直線上,同樣,F1、F2、F3…也如此。為此,圖2中取定向直線與航跡間的公垂線在航跡上的垂足Ak和Bk作為Ek和Fk在航跡上的投影點,進而得到雙參考源間距估計值^r0k.
以Ak為例,要確定其坐標需要航跡PQ和定向直線OEk的方向向量。由圖1的幾何關系可得航跡PQ 與Oyz平面交點Q =[0,R0,H0],那么P點坐標為

這樣航跡PQ的方向向量為

對于第k個雙脈沖周期,假設由(1)式估計的脈沖聲源坐標為Ek=[xEk,yEk,zEk],則定向直線OEk的方向向量為

由(3)式和(4)式可得Ak點坐標為
將(4)式中Ek的坐標替換為Fk,即得另一垂足Bk的坐標,因此

式中:AkBk為Ak和Bk之間的距離,它是航跡參數(θ,φ,R0,H0)的函數;K為雙脈沖周期數。顯然,通過(6)式可將二維空間的DSS算子擴展到了三維空間,即

1. 2. 2 將PD算子擴展到三維空間中
對于某個頻率下的連續波脈沖聲源,其相鄰兩個周期的波形存在圖3所示的幾何關系。
圖3 相鄰連續波脈沖的聲程差示意圖Fig. 3 Schematic diagram of acoustic path difference of adjacent CW pulse
對于坐標為Sm的第m個陣元的接收信號,A聲源的相鄰兩個脈沖波形前沿時刻的差值Tm可由(1)式估計的tm得到,即Tm= tm2- tm1.由此得到相鄰脈沖的聲程差為

式中:SmA1和SmA2分別是Sm到A1和A2的距離。這里Ak的定義與圖2中相同,即定向直線OEk與航跡PQ的公垂線在航跡上的垂足。不同陣元下對每組相鄰脈沖均可得到類似(8)式的等式,這樣就把PD算子轉換到三維空間
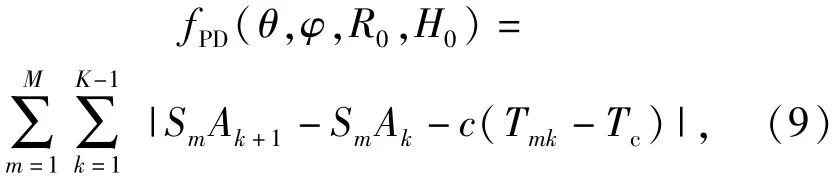
式中:Tmk為第m個陣元接收信號中第k和k + 1個脈沖之間的時間間隔,即Tmk= tm(k +1)- tm(k).
1. 2. 3 增加CPL最小化的限制條件
在真實航跡所在垂直平面,即圖1中的陰影平面內,平行于真實航跡的一些直線對應的DSS和PD算子值較為接近,從而難以確定航跡參數。因此公垂線最小化條件可以規避該情形,即最小化為

式中:dEk= EkAk,dFk= FkBk,即兩條公垂線的長度。其中[9]
上述各變量的定義與(4)式和(5)式中對應變量相同,類似的可以得到dFk的表達式。
1. 2. 4 三維空間的DPS方法
將上述3個算子結合在一起就得到三維空間的DPS方法

式中:fPD1和fPD2是分別針對兩個連續波脈沖聲源的PD算子。采用遺傳算法使上述目標函數最小化即可得到航跡估計結果。另外,(11)式采用相加而不是文獻[7]中相乘的方式得到DPS算子是因為CPL算子的值有可能很小,容易使相乘方式構造的DPS算子出現局部極小值。
為了準確估計相鄰脈沖間的目標航速,需要確定各脈沖輻射前沿時刻下雙參考源的坐標。以第一參考源為例,其坐標Ak可由航跡估計結果(θ,φ,R0,H0)代入(5)式得到,但是它對應的輻射時刻tE(k)通常不等于(1)式中的ts,因為ts對應的是脈沖基線定位結果Ek的輻射時刻。為此,需要根據各陣元的脈沖前沿到達時刻tEm(k)(m =1,…,M),以及Ak來反推tE(k),即

依此方法,可以得到Bk對應的輻射時刻tF(k).這樣相鄰兩個脈沖信號間目標的航速為

1. 3 理論分析
三維空間的DPS方法相當于將脈沖定位結果對應的定向直線OE和OF投影到平面OPQ上,進而在該平面內利用DSS和PD算子確定航跡參數,因此其核心仍是二維平面內的航跡擬合。在二維投影平面內估計正橫距離R'0和航向角θ'后,可根據平面OPQ在三維空間的位置得到航跡參數(θ,φ,R0,H0).
圖4給出了雙參考源A和B的兩組脈沖定位結果投影到平面OPQ后的幾何關系。假定目標從左向右作直線運動,r1和r3為第一參考源相鄰兩個脈沖對應的定向直線,r2和r4為第二參考源相鄰兩個脈沖對應的定向直線。由基線定向結果可得r1、r2和r3、r4所夾角度分別為β1和β2,它們正對的三角形邊長均為雙源間距r0.
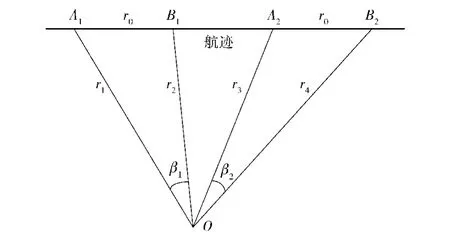
圖4 DPS方法原理示意圖Fig. 4 Schematic diagram of DPS method
由三角形三邊關系有

式中:r1、r2、r3、r4為未知量。若以三角形OA1B1為參考,OA2B2的對應邊長和夾角可改寫為r3= r1+Δa,r4= r2+Δb,β2=β1+Δβ,其中Δa、Δb分別為同一參考源在不同位置的距離估計差,Δβ為兩次估計夾角的差,代入(14)式得

整理得
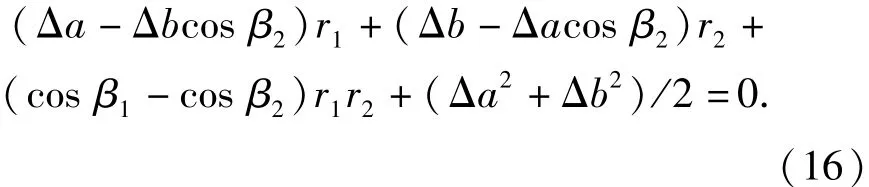
當有多組雙脈沖定向結果時,即有多個三角形OAiBi,i =1,…,K,可利用(16)式構建r1和r2的二元二次方程組
二維空間內DPS方法就是要尋找一條航跡直線與rk所在的定向直線相交,并盡可能保證AkBk= r0.而對于任意給定的航跡直線,(17)式中獨立的未知量僅有r1和r2.
當K =4時,通過簡單的變量代換可得
式中:Ui=Δai-Δbicos βi;Vi=Δbi-Δaicos βi;Wi=cos β0- cos βi;Xi=(Δa+Δb)/2.
(18)式、(19)式成立的條件是分母不為0,整理后得Wi/ Wj≠Ui/ Uj,Wi/ Wj≠Vi/ Vj,其中i≠j,這在實際中容易滿足。尤其是當K>4時,可采用非線性最小二乘求解(17)式得到r1和r2,從而得到二維空間航跡參數(θ',R'0),并換算到三維空間中的(θ,φ,R0,H0).
2 仿真
本文著重給出不同信噪比下,以及不同航向角和俯仰角下DPS方法在三維空間中的航跡參數估計性能。在圖1所示條件下,假定采用M = 9元均勻十字陣,其中垂直方向陣元數為2個,陣元間距d =0. 3 m.兩個間距r0= 0. 5 m的連續波脈沖聲源載頻f0=[6 000 Hz,7 000 Hz],脈沖周期均為Tc= 200 ms.水中聲速c = 1 500 m/ s,目標作航速υ= 20 m/ s的勻速直線運動,航跡參數(θ,φ,R0,H0)= [10°,15°,40 m,0 m],從中截取K =7組雙脈沖進行航跡參數估計。圖5給出了信噪比SNR =0 dB時的航跡估計結果,其中信噪比定義為雙脈沖源的能量和與背景噪聲能量的比值,基線定位方法是第一參考源定位結果則經過了Kalman平滑處理。圖5 中DPS估計的航跡參數為(θ,φ,R0,H0)= [10. 42°,15. 07°,39. 17 m,- 0. 01 m],即估計偏差為[0. 42°,0. 07°,0. 83 m,0. 01 m].

圖5 0 dB時DPS方法的航跡估計結果Fig. 5 Track estimation result of DPS method at 0 dB

圖6 不同信噪比下DPS方法的航跡參數估計性能Fig. 6 Track estimation performance of DPS method at different SNRs
相同仿真條件下,圖6給出了100次Monte Carlo實驗后,不同信噪比下DPS方法的航跡參數估計結果的平均絕對偏差。隨著信噪比的提高,DPS方法的航跡估計性能不斷提高,其中航向角θ和正橫距離R0的估計偏差大于俯仰角φ和深度差H0的估計偏差。這與平面陣對垂直于其所在平面的縱深方向的分辨能力較弱有關,因而航向角θ和正橫距離R0也更易受到基線定位方法測向偏差,以及聲程差估計偏差的影響。圖7和圖8分別給出了0 dB下100次Monte Carlo實驗后不同航向角和俯仰角下航跡參數的平均估計偏差,其中航向角θ和正橫距離R0的估計偏差仍大于相應的俯仰角φ和深度差H0的估計偏差。另一方面,隨著航向角θ和俯仰角φ的增大,即航跡直線與平面陣所在平面夾角增大時,航跡估計性能逐漸下降。在0 dB下,當航向角θ和俯仰角φ均在[-40°,40°]內時,θ和φ的估計偏差在3. 8°以內,而R0和H0的估計偏差在5. 9 m以內。
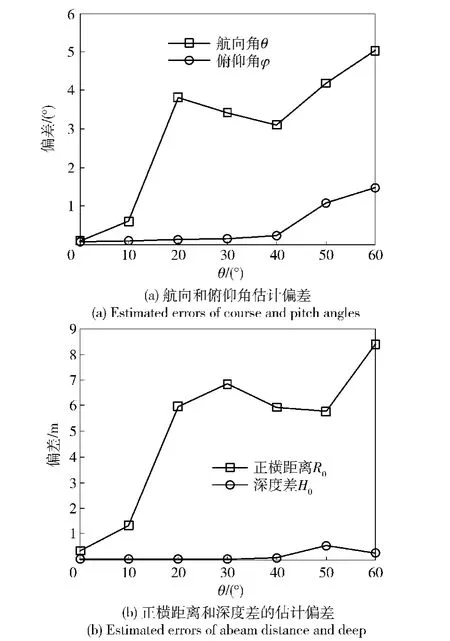
圖7 不同航向角下DPS方法的航跡估計性能Fig. 7 Track estimation performance of DPS method at different course angles
3 水庫實驗驗證
受限于實驗成本,下面以水庫中自由落體目標的航跡估計為例來驗證DPS方法。圖9給出了實驗示意圖,其中水聽器陣列與運動目標均在垂直面內,即(θ,R0)確定了航跡。水聽器陣列為6 m長的11元均勻十字陣,其中垂直方向陣元數為2個。運動目標為從水面開始作自由落體的金屬殼體,其上加裝兩個間距r0= 0. 4 m的脈沖參考源,連續波脈沖載頻為[7 000 Hz,10 000 Hz],脈沖周期均為200 ms.

圖8 不同俯仰角下DPS方法的航跡估計性能Fig. 8 Track estimation performance of DPS method at different pitch angles
圖10給出了兩次獨立實驗的航跡估計結果。兩次實驗中僅改變了陣列與航跡的間距R0,其他實驗參數和環境相同。兩次實驗的真實航跡參數(θ,R0)分別為(0°,31. 3 m)和(0°,23 m)。DPS方法的航跡估計結果分別為(- 5. 7°,32. 5 m)和(-5. 1°,21. 2 m),即正橫距離R0估計偏差在2 m以內,航向角θ估計偏差在- 6°以內。航向角估計偏差過大可能是由于錨定的浮船仍在水面上緩慢旋轉漂移,使得垂直吊放的線陣有一定傾斜度,因此上述實驗中真實航向角可能在-5°左右。
4 結論
本文在文獻[7]的雙參考源航跡估計方法基礎上,將原有的雙源間距和聲程差目標函數擴展到三維空間,并引入CPL最小化目標函數,從而將二維空間中的DPS方法推廣到了三維空間中。DPS方法相當于利用三維空間中基線定位方法的定向結果,以及已知的雙參考源間距等信息構造航跡參數的最優化目標函數,進而通過遺傳算法估計近場直線運動目標航跡。所得到的航跡信息包含各脈沖輻射時刻下目標的三維坐標,因而也可以得到各時段下直線運動目標的航速。仿真和水庫實驗驗證了DPS方法的有效性。

圖9 水庫航跡估計實驗示意圖Fig. 9 Schematic diagram of track estimation test in reservoir
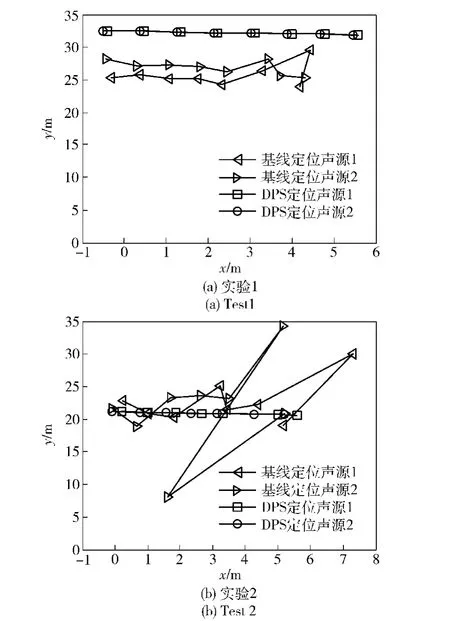
圖10 兩次水庫實驗的航跡估計結果Fig. 10 Two result of track estimation test in reservoir
參考文獻(References)
[1] Kim S M,Choi Y,Lim Y K. Nearfield noise identification with a passive array in the underwater anechoic basin at KRISO[C]∥OCEANS 2003. San Diego,CA,US:IEEE,2003:1389 -1394.
[2] Yoon J H,Kim D Y,Bae S H,et al. Joint initialization and tracking of multiple moving objects using Doppler information[J]. IEEE Transactions on Signal Processing,2011,59(7):3447 -3452.
[3] Tegborg V,Pettersson M I,Claesson I. Experimental results of passive imaging of moving continuous broadband sound sources within a sensor field[J]. IEEE Journal of Oceanic Engineering,2011,36(1):25 -36.
[4] 董利英,陳志菲.近場條件下脈沖基線定位性能影響因素分析[J].魚雷技術,2014,22(2):100 -104. DONG Li-ying,CHEN Zhi-fei. Influencing factors of pulse baseline positioning performance in near field[J]. Torpedo Technology,2014,22(2):100 -104.(in Chinese)
[5] Hu B,Yang D,Shi S,et al. Underwater moving noise source identification based on hybrid near-field acoustical holography [J]. Science China:Physics,Mechanics and Astronomy,2011,54(9):1570 -1578.
[6] Mei J D,Sheng X L,Guo L X,et al. Sea trial research on multisource underwater acoustic image measurement technology based on the sparse array[C]∥OCEANS 2010. Seattle,WA:IEEE,2010.
[7] Chen Z,Hou H,Yang J,et al. Linear track estimation using double pulse sources for near-field underwater moving target[J]. Journal of Marine Science and Application,2013,12(2):240 -244.
[8] 陳曉忠,梁國龍,王逸林,等.非同步水聲定位技術及其性能評價[J].聲學學報,2003,28(4):357 -362. CHEN Xiao-zhong,LIANG Guo-long,WANG Yi-lin,et al. Nonsynchronous underwater acoustic location and it’s performance evaluation[J]. Acta Acustica,2003,28(4):357 - 362.(in Chinese)
[9] 董玉久,潘秀英,楊欣欣.兩異面直線公垂線垂足位置的計算方法[J].哈爾濱科學技術大學學報,1990,14(1):84 -88. DONG Yu-jiu,PAN Xiu-ying,YANG Xin-xin. A calculation method for finding the foot of common perpendicular of lines on different places[J]. Journal of Harbin University of Science & Technology,1990,14(1):84 -88.(in Chinese)
Research on Double Reference Source Estimation Method for 3-dimension Space of Near-field Underwater Moving Target with Linear Track
WANG Qian1,HOU Hong1,YIN Shao-ping2,CHEN Zhi-fei3
(1. School of Marine Science and Technology,Northwestern Polytechnical University,Xi’an 710072,Shaanxi,China;2. The 705 Research Institute,China Shipbuilding Industry Corporation,Xi’an 710075,Shaanxi,China;3. Institute of Acoustics,Chinese Academy of Sciences,Beijing 100190,China)
Abstract:For the identification of noise source,the track information could be applied to Doppler compensation for the recorded noise emitted from moving vehicle. Linear track estimation of near-field underwater moving target by double pulse source(DPS)has been used successfully in 2-dimension. The use of DPS is extended to 3- dimension space in order to linearly track the target. The positioning result of double reference source obtained by the baseline positioning method is projected to a certain plane under the limitation of common perpendicular minimum length. The objective function of DPS is constructed with the known distance of double reference source. The track information in 3-dimension space is obtained by using genetic algorithm. The simulation results show that the estimated errors of azimuth and pitch angles are less than 3. 8°when their trace line lies under[-40°,40°]in case of 0 dB noise level. The estimated errors of abeam distance and depth difference are kept less than 5. 9 m at the same time.
Key words:acoustics;parameter estimation;linear track estimation;double reference source;baseline positioning
中圖分類號:TB568
文獻標志碼:A
文章編號:1000-1093(2016)04-0677-07
DOI:10. 3969/ j. issn. 1000-1093. 2016. 04. 015
收稿日期:2015-05-20
基金項目:海軍裝備預先研究項目(4011003010201)
作者簡介:王謙(1982—),男,高級工程師,博士研究生。E-mail:king2397@126. com;