新型膠體材料在白芨溝礦火區下分層煤自燃預防中的應用
2013-03-15 11:15:40周光華黃盛初李玉民宋宜猛楊春寧
中國煤炭 2013年6期
周光華 黃盛初 李玉民 宋宜猛 楊春寧
(1.神華寧夏煤業集團有限責任公司,寧夏回族自治區銀川市,750011;2.國家安全生產監督管理總局信息研究院,北京市朝陽區,100029)
白芨溝煤礦2421-2綜放工作面位于南二采區四階段和南四采區六階段,北部為實體煤,東部北段為2321-1采空區。平均煤厚10.5 m。工作面走向長1488 m,傾斜寬152 m,煤層傾角015°。開采工藝為綜合機械化放頂煤開采,采高3m,放頂煤高度7m。由于2421-2綜放面布置在2421-1綜放面采空區之下,采動影響致使2421-2綜放面在開采過程中容易引起頂板破碎,產生上分層采空區漏風,導致上部采空區原有高溫浮煤加快氧化速度而引起自然發火。2421-2綜放工作面于2005年9月安裝回采后,工作面前方采空區由于浮煤氧化存在大量CO 氣體,且有局部高溫點出現。經及時在地面對應位置施工鉆孔灌漿、注三相泡沫等材料控制高溫區發展,工作面安全開采約660m,距1700回四川和1660運二川280m 處,其前方施工的探火鉆孔內發現CO 氣體超限,最高濃度達0.0188%。2421-2工作面探火、灌漿鉆孔平面布置如圖1所示。
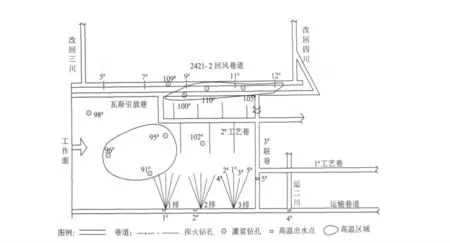
圖1 2421-2工作面探火、灌漿鉆孔平面布置示意圖
1 火區初步處理及效果分析
針對2421-2綜放面火區出現CO 超限情況,初期采用了常規治理方法處理,即通過圖1中地面91#鉆孔灌注黃泥漿液。但隨后在工作面運輸巷道發現多處高溫淋水點,且溫度多在26℃以上。經近1個月的黃泥灌漿,發現運輸巷道淋水溫度并沒有下降,2421-2回風巷道5#、7#等探孔CO 濃度不降反升,且瓦斯引發巷內出現大量霧氣。經分析是灌漿沒有到達高溫點位置,只經過火點邊緣帶出了高溫水汽。事后,白芨溝礦分析了此次黃泥灌漿滅火不成功的原因,主要是存在以下問題:傳統的黃泥灌漿系統中水土比為5∶1左右,漿液流失量大,且漿水存在嚴重的 “拉溝”現象,在較大空間內不能有效堆積,即不能到達高位火點;注水灌漿時,漿液順工作面傾斜方向流往低處,不能在高處積存。灌漿后形成固定的水流通道,很難再向其它地點滲流,不能熄滅高處大面積火源,且水和漿液從煤體表面流過,不能有效地降低塊煤內部溫度,停止注漿后,風流滲透流暢,復燃很快。
要解決以上問題,要求灌注的防滅火材料必須能夠在采空區內有效堆積,封堵流水通道,減少漏風,起到固留水分、降溫滅火作用。
2 高分子膠體滅火材料的特點
要治理2421-2 綜放面上部采空區的高溫區域,首先必須有效控制漏風,阻止向高溫區域供氧;其次是灌注材料應該能積聚在高溫區域內,起到降溫作用;再次是有效封堵流水通道,防止下部工作面開采時可能導致的 “潰漿”事故。為了更加有效、可靠地對該處隱患進行治理,根據對現有防滅火材料的性能比較,決定先通過地表鉆孔灌注FCJ-12復合膠體,對流水通道進行有效封堵后,再灌注MCJ12高分子滅火膠體進行滅火。
2.1 FCJ-12復合膠體的堵漏性能
FCJ12復合膠體添加劑是由線性親水性高聚物、交聯的高吸水樹脂和少量改善與煤體間潤濕性與阻化性的無機和有機材料組成。這種凝膠主要是線性高分子材料的水溶液,因此有一定的粘彈性,是復合性的彈性凝膠。FCJ-12復合膠體中水約占90%,膠體及其它約占10% ,混合后形成相對穩定的膠體狀態,不發生離析。FCJ-12復合膠體材料通過采用沉入度法及間接加入填充劑后,達到了純凝膠的強度,且在填充劑與純凝膠之間加強了粘附力作用、能量流散作用、吸附作用及溫度效應,增強了復合膠體的流動性;隨著加熱溫度的升高、加熱時間的延長,減緩流動性,增大強度。具備這兩個特性的復合膠體可有效地對漏風和流水通道進行封堵。
2.2 MCJ12高分子膠體滅火性能
MCJ12高分子膠體防滅火技術集堵漏、降溫于一體,防滅火效果佳,已成為煤層自燃火災治理的主要技術手段之一。膠體材料具有如下防滅火性能:
(1)固水性,純膠體中90%以上是水,易于流動的水被固結起來,充分發揮水的降溫滅火作用;
(2)熱降溫性,成膠過程是吸熱反應,煤溫上升使膠體中的水汽化,也吸收大量的熱;
(3)滲透和堵漏性,成膠材料是易于流動的液體,滲透到煤層縫隙中后形成膠體,堵住漏風通道;
(4)阻化性,促凝劑和基料本身都是阻化劑,兩者反應生成的材料也是阻化劑,膠體具有通用阻化劑的性能;
(5)熱穩定性,在1000℃以上的高溫下,膠體不熔化、不破裂,仍能保持完好,只是慢失水干裂;
(6)充填性能,增強劑 (黃土、粉煤灰等)用量增加,膠體耐壓性增強,在注漿口附近膠體堆積高度可略高于注漿口標高,通過改變出漿口的出口壓力可調節膠體泥漿的堆積高度;
(7)滅火安全性,由于膠體有束水作用,在用于撲滅煤火時,不會急劇產生大量的水煤汽而惡化工作環境或發生爆炸;
(8)有效期,正常情況下 (T<28℃,濕度>90%),膠體可長期保存在煤層中 (現場實測13個月仍完好),防止煤層自然發火或火區復燃;
(9)成膠時間可控性,最短成膠時間25s,慢的可控制在2h以上,便于針對不同發火情況和現場使用工藝對其進行適當調節。
3 滅火工藝及效果分析
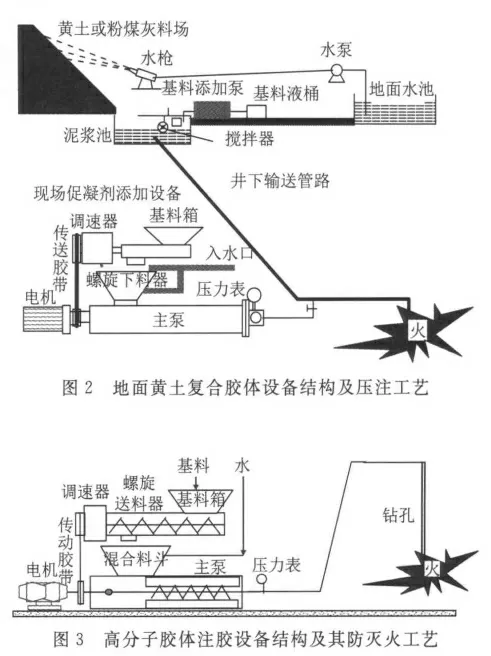
3.1 FCJ-12復合膠體材料壓注工藝
復合膠體材料的壓注如圖2所示。攪拌和混合工作主要在地面完成,首先利用地面制漿站將黃土和水按比例制成黃泥漿液,輸送至灌漿鉆孔處,然后接入復合膠體促凝劑添加設備在黃泥漿液中按照1%的比例加入FCJ-12復合膠凝劑,通過鉆孔注入火災隱患區。
3.2 MCJ12高分子膠體壓注工藝
MCJ12高分子滅火膠體注膠工藝如圖3所示。高分子膠體壓注機是一種專門將粉狀基料按比例分散開撒入水中,并攪拌使之均勻,最終配制成膠體的設備。MCJ12高分子滅火膠體配比完成后,通過地面鉆孔注入火災隱患區域即可。高分子膠體壓注機壓注泵的流量為定量泵,基料下料速度可通過調節調速器的轉速實現。由于這種膠體添加劑用量很少,注膠設備也比較輕便,因此注膠滅火快捷方便。這種膠體壓注機適合小范圍煤層自燃火災的快速撲滅。MCJ12高分子膠體材料的配比為0.8%-1%。
3.3 實施及效果分析
此次防滅火工作主要通過地面鉆孔實施。首先通過圖1中高溫區域內的91#、95#、96#、100#、105#、110#等地面鉆孔灌注FCJ-12 復合膠體,幾天后發現原井下2421-2運輸巷道幾處流水點流出的水呈現膠體狀,流水量逐漸減小。判斷是灌注的材料在采空區內形成膠體狀,逐漸將流水通道封堵,并固留了膠體中的水分。經過堵漏后,對高溫區域內的上述鉆孔開始灌注MCJ12高分子滅火膠體,發現運輸巷道1#、2#、4#等淋水點明顯消失,水溫由原來的28℃下降到18℃,瓦斯引放巷內溫度明顯下降,原有的霧氣逐漸消失。回風巷道5#、7#、9#等探火鉆孔內CO 氣體濃度逐漸下降至安全范圍,工作面加快了推進度,當月推進度達到60m。
4 結論
(1)傳統的礦用滅火注漿材料由于強度低易破碎脫水,不能有效地堆積和留存, 一定程度上影響了煤炭自燃火災防治的效果,因此不適合2421下分層綜放工作面的火區治理。
(2)FCJ-12 復合膠體材料具備良好的粘附力、固水性和流動性,能夠很好地達到封堵漏風和組織漿液流失作用,同時有一定的降溫效果,對隨后灌注MCJ12高分子膠體起到封存作用。
(3)MCJ12高分子膠體的防滅火技術集堵漏、降溫于一體,同FCJ-12 復合膠體材料同時使用有效地消除了常規灌漿不能達到高位火區的效果,封堵了漏風通道,控制了2421采空區高溫區域的發展,降低了CO 濃度,確保了2421下分層綜放面的安全開采。
[1] 徐精彩,文虎,鄧軍等.凝膠防滅火技術在煤層內因火災防治中的應用 [J].中國煤炭,1997 (5)
[2] 徐靜,張興華.新型高分子防滅火材料在煤礦井下的應用 [J].江蘇煤炭,2004 (1)
[3] 張哲瑞.膠體防滅火技術在高瓦斯綜放面的應用研究 [J].中國煤炭,2010 (8)
[4] 沈鐘,王果庭.膠體與表面化學 [M].北京:化學工業出版社,1997
[5] 張永祥,陳鴻漢.多孔介質溶質運移動力學 [M].北京:地震出版社,2000
[6] 文虎,朱興攀,金永飛等.馮家塔礦煤層隱蔽火源探測及防治技術研究與應用 [J].中國煤炭,2013(2)
[7] 張福喜,劉繼勇,張辛亥.稠化膠體防滅火技術在陽泉煤業集團的應用 [J].礦業安全與環保,2005(5)
