基于聯(lián)合仿真的饋能懸架協(xié)調(diào)控制研究
2016-07-25 01:22:44蔣亦棟
環(huán)球市場 2016年22期
關(guān)鍵詞:模型
蔣亦棟
江蘇大學(xué)汽車學(xué)院
基于聯(lián)合仿真的饋能懸架協(xié)調(diào)控制研究
蔣亦棟
江蘇大學(xué)汽車學(xué)院
以饋能型半主動(dòng)懸架系統(tǒng)為研究對象,對其控制系統(tǒng)進(jìn)行設(shè)計(jì)及仿真研究,搭建饋能性半主動(dòng)懸架動(dòng)力學(xué)模型,設(shè)計(jì)了天棚加地棚控制算法,在上述基礎(chǔ)上搭建了Simulink和Admas聯(lián)合仿真模型,仿真結(jié)果符合饋能型半主動(dòng)懸架預(yù)計(jì)效果。
摘要:聯(lián)合仿真;饋能型半主動(dòng)懸架;天棚加地棚控制
引言:
饋能型懸架是一種能夠回收振動(dòng)能量的新懸架系統(tǒng)。其最基本的工作原理就是用饋能阻尼替代傳統(tǒng)被動(dòng)阻尼,將原本被耗散掉的機(jī)械能轉(zhuǎn)變?yōu)榭杀辉俅卫玫哪芰浚右曰厥铡T撓到y(tǒng)不但能降低燃油消耗、減少污染物的排放,而且還能提高車輛性能。該技術(shù)為未來汽車懸架系統(tǒng)電動(dòng)化提供了一種新的設(shè)計(jì)思路[1-2]。
本論文以饋能型半主動(dòng)懸架為研究對象,建立了饋能型半主動(dòng)懸架動(dòng)力學(xué)模型,并在此基礎(chǔ)上搭建了Simulink和Admas聯(lián)合仿真模型,為有效優(yōu)化懸架的饋能性,引入天棚加地棚控制算法對設(shè)計(jì)懸架進(jìn)行協(xié)調(diào)控制,仿真結(jié)果與預(yù)計(jì)相符。
1、饋能型半主動(dòng)懸架動(dòng)力學(xué)建模
將整車簡化為二自由度的單輪動(dòng)力學(xué)模型,如圖1所示。

圖1 半主動(dòng)饋能懸架系統(tǒng)單輪模型
依據(jù)建立的懸架單輪模型,得到系統(tǒng)的動(dòng)力學(xué)微分方程如式(1)所示:

其中m2為系統(tǒng)的懸掛質(zhì)量,m1為系統(tǒng)的非懸掛質(zhì)量,q為路面輸入位移,k為彈簧剛度,kt為輪胎剛度,c0為傳統(tǒng)阻尼器的阻尼系數(shù),F(xiàn)M為直線電機(jī)的電磁阻尼力,G0為路面不平度系數(shù),w(t)為均值為零的高斯白噪聲,v0為車速,f0為下截止頻率。
2、天棚加地棚控制
饋能懸架系統(tǒng)的半主動(dòng)控制采用天棚加地棚的控制策略,控制的原理如圖2所示。基于簧載和非簧載質(zhì)量得到的理想作動(dòng)力如式(2)所示。


圖2 饋能懸架半主動(dòng)控制原理圖
通過天棚加地棚的控制策略得到理想的電機(jī)參考作動(dòng)力Fref,與電機(jī)的電磁阻尼系數(shù)ki相除便得到繞組參考電流iref,輸送至半主動(dòng)回路控制器,經(jīng)運(yùn)算輸出兩路脈沖信號(hào)控制半主動(dòng)回路,使得電機(jī)繞組中的實(shí)際電流跟蹤理想的參考電流。
3、聯(lián)合仿真
基于Simulink/ADmas仿真環(huán)境搭建了饋能型半主動(dòng)懸架系統(tǒng)的單輪模型,針對B級(jí)和C級(jí)路面輸入車速分別為10m/s、20m/s四種工況進(jìn)行了聯(lián)合仿真,仿真分析了饋能型半主動(dòng)懸架的饋能特性,其仿真以針電機(jī)輸出端電壓和繞組電流作為懸架饋能效率評(píng)價(jià)指標(biāo)。仿真時(shí)間10s。仿真結(jié)果如表1所示。
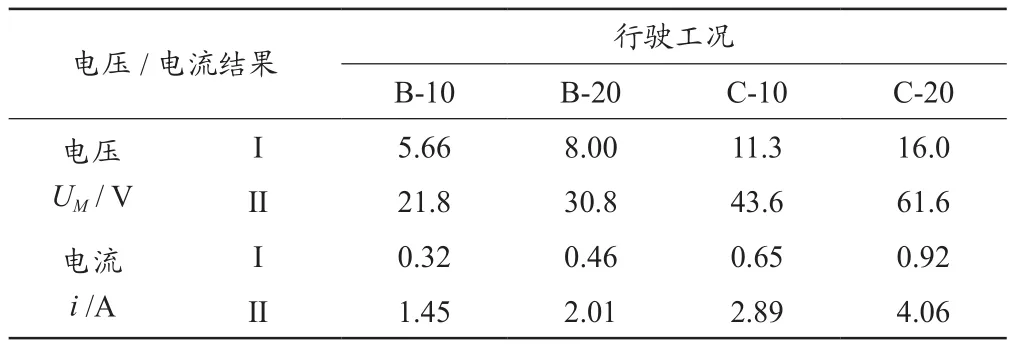
表1 電機(jī)輸出端電壓和繞組電流的均值及最大值
由表1可知,電機(jī)繞組中電流的變化趨勢與直線電機(jī)輸出端電壓一致。隨著車速的增加,直線電機(jī)輸出端電壓和繞組電流的值逐漸增大;隨著路面輸入工況的惡化,直線電機(jī)輸出端電壓和繞組電流的值逐漸增大。
4、結(jié)論
以饋能型半主動(dòng)懸架系統(tǒng)為研究對象,建立了Simulink和Admas聯(lián)合仿真模型,引入天棚加地棚控制算法對懸架饋能性進(jìn)行控制,仿真結(jié)果與預(yù)期相符。
[1]張勇超,喻凡,顧永輝,等.汽車電動(dòng)懸架的減振與饋能特性試驗(yàn)驗(yàn)證[J].上海交通大學(xué)學(xué)報(bào),2008.6: 874-877.
[2]陳星.基于電磁執(zhí)行器的智能懸架能量回收研究[D].重慶:重慶大學(xué),2011.
[3]于長淼,王偉華,王慶年.饋能懸架阻尼特性及其影響因素[J].吉林大學(xué)學(xué)報(bào),2010,40(6):1482-1486.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19