四立柱道路模擬試驗迭代控制點選擇方法研究
2016-08-02 07:59:55張愛龍伊斯武喻鎮濤滕今仙國家汽車質量監督檢驗中心襄陽襄陽441004
汽車科技 2016年2期
張愛龍,伊斯武,喻鎮濤,滕今仙(國家汽車質量監督檢驗中心(襄陽),襄陽,441004)
?
四立柱道路模擬試驗迭代控制點選擇方法研究
張愛龍,伊斯武,喻鎮濤,滕今仙
(國家汽車質量監督檢驗中心(襄陽),襄陽,441004)
摘 要:四立柱道路模擬試驗通過迭代過程完成整車垂向運行狀態模擬,選擇的迭代控制點越多,模擬精度越高,但采集道路信號的工作量越大,迭代過程也越復雜。為了兼顧模擬精度、試驗工作量及迭代難度,本文對迭代控制點的選擇方法展開了研究,首先對四立柱常用迭代控制點之間的關系進行了分析及驗證;進一步提出以輪心垂直加速度和減振彈簧應變作迭代控制點為一種較優的選擇方法;最后進行了相應的四立柱迭代試驗驗證。
關鍵詞:四立柱道路模擬;迭代控制點;信號分析;迭代試驗

張愛龍畢業于南開大學,控制理論與控制工程專業,碩士學位,主要從事汽車結構疲勞試驗技術研究,曾獲襄陽市科技進步三等獎一次。
1 引言
在乘用車開發過程中,各開發階段樣車都需要開展整車耐久性試驗。整車耐久性試驗一般通過試驗場道路試驗來驗證,整個測試周期長,人力投入高。為了減少對整車道路試驗的依靠,提高產品試驗場整車道路試驗的通過率,在開發試驗過程中,需增加整車道路模擬耐久性試驗。整車道路模擬耐久性試驗具有非常接近整車道路試驗工況的特點,同時試驗周期短,重復好,能夠提前發現整車耐久性的問題并驗證解決效果,縮短開發周期[1-2]。
四立柱道路模擬試驗通過迭代過程完成整車垂向運行狀態模擬[3-5],即利用試驗臺架在整車的四個輪胎接地點位置施加豎向位移激勵整車,并反復修正位移激勵量,直到整車的振動狀態逼近在試驗道路上行駛的振動狀態。四立柱試驗通常選擇輪心垂直加速度、懸架正上方車身垂直加速度、減振器位移和減振彈簧應變作為整車振動狀態考核指標。臺架模擬試驗前在整車的相應位置布置加速度計、位移傳感器及應變片,并到實際道路試驗工況上面采集相應的信號;進一步在四立柱上通過迭代直到收集的臺架響應信號與道路上采集的信號一致[6]。
臺架響應與道路采集信號的一致性直接決定了道路模擬試驗的準確性。通常迭代選擇的控制信號點越多,模擬精度越高,但是前期采集信號的工作量越大,迭代過程也越復雜。為了兼顧模擬精度及試驗工作量和迭代難度,本文對迭代控制點的選擇方法展開了研究,首先對四立柱常用迭代控制點之間的關系進行了分析及驗證;進一步提出以輪心垂直加速度和彈簧應變作迭代控制點為一種較優的選擇方法;最后進行了相應的四立柱迭代試驗驗證。
2 四立柱常用迭代控制點關系分析
整車四立柱前懸常用迭代控制點的布置如圖1所示,定義輪心垂直加速度、懸架正上方車身垂直加速度、彈簧應變、減振器位移量分別為adown、aup、?及S。
根據胡可定律,彈簧應變與減振器位移變化量成比例,即

其中K為常系數。而

vdown、vup分別為輪心和懸架上車身垂直速度。將式(3)

代入式(2)可得式(4)

結合式(4)與式(2)可得式(5)


圖1 前懸迭代控制點分布
3 迭代控制點關系分析驗證
利用道路采集的數據對分析得出的彈簧應變與減振器位移變化量之間的比例關系(式(1))及彈簧應變與輪心和懸架上車身垂直加速度的關系(式(5))進行驗證。為了避免驗證數據重復使用,提高驗證的準確性,式(1)與式(5)的驗證使用不同車型所采集的數據。
風神某越野車型在比利時工況采集的右前減振彈簧應變與減振器位移變化量信號歷程的局部段如圖2所示,由50至55 s的放大視圖可見應變與位移曲線變化趨勢相似。選取三個時間點位置求取應變位移的比值,取平均得到比例系數K為40.1,將整段位移歷程乘以該系數,得到的信號歷程與應變信號放在同一視圖,局部如圖3所示。按比例轉換后的位移曲線與應變曲線吻合度較高,驗證了彈簧應變與減振器位移的比例關系。

圖2 某越野車型右前彈簧應變及減振位移歷程

圖3 通過比例系數轉換后的位移信號及應變信號局部視圖
對風神某轎車車型在比利時路工況采集的右前輪心、懸上車身垂直加速度求差如圖4所示,按照式(4)對差值進行二重積分的結果如圖5、圖6所示:

圖4 某轎車型右前輪心、懸上車身垂直加速度差

圖5 對差值關于時間求積分得到速度差

圖6 對差值關于時間求二重積分得到位移差
通過圖6中100至110 s的局部放大圖可見加速度差的二重積分與彈簧的應變曲線相似。選取三個時間點位置求取應變、二重積分的比值,取平均得到比例系數K為20.6,將整段二重積分歷程乘以該系數,得到的信號歷程與應變信號放在同一視圖,局部如圖7所示。按比例轉換后的二重積分曲線與應變曲線吻合度較高,驗證了式(5)應變與輪心和懸架上車身垂直加速度的關系。

圖7 通過比例系數轉換后的二重積分及應變信號局部視圖
4 四立柱迭代控制點選擇
式(1)表明彈簧應變與減振位移有較好的比例關系,兩種信號只需選擇一種。目前用于測量整車減振器位移的傳感器主要有拉線式和拉桿式,均需要在懸架上下端各定一個點來固定位移傳感器的兩端,受空間的約束,安裝使用復雜,一種拉線式位移傳感器的固定方式如圖8所示。而彈簧應變的測量較簡單,只需要在彈簧上面布置應變花,如圖9所示。因而采用減振彈簧應變作為一種迭代控制點。
式(5)表明彈簧應變與輪心和懸架上車身的垂直加速度有固定的關系,由于輪心的加速度幅值較大,靈敏度高,采用輪心垂直加速度作為另外一種迭代控制點。
兼顧模擬精度和工作復雜度,以輪心垂直加速度和彈簧應變作為四立柱迭代控制點為一種較優的選擇方法。

圖8 一種拉線式位移傳感器的雙約束點固定方式

圖9 彈簧應變花布置
5 四立柱迭代試驗驗證
按照選擇的迭代控制點,在風神某轎車車型進行四立柱道路模擬試驗。以四個輪心垂直加速度和四個減振彈簧應變作為信號點,比利時路工況的迭代結果如圖10所示,臺架響應信號與道路信號時間歷程的均方根(RMS)正則化均小于10%,達到迭代要求。

圖10 某轎車車型四立柱迭代結果
利用迭代獲取的驅動信號激勵臺架,得到懸架上車身的垂直加速度與道路上實際采集的信號對比如圖11所示。懸架上車身的垂直加速度沒有進行迭代,僅為監測點,但最終臺架響應信號與道路采集信號能夠匹配,說明輪心垂直加速度和彈簧應變能夠達到約束懸上車身垂直加速度的作用,進一步表明以輪心垂直加速度和彈簧應變作為四立柱迭代控制點能夠兼顧模擬精度和工作復雜度,為一種較優的選擇方法。
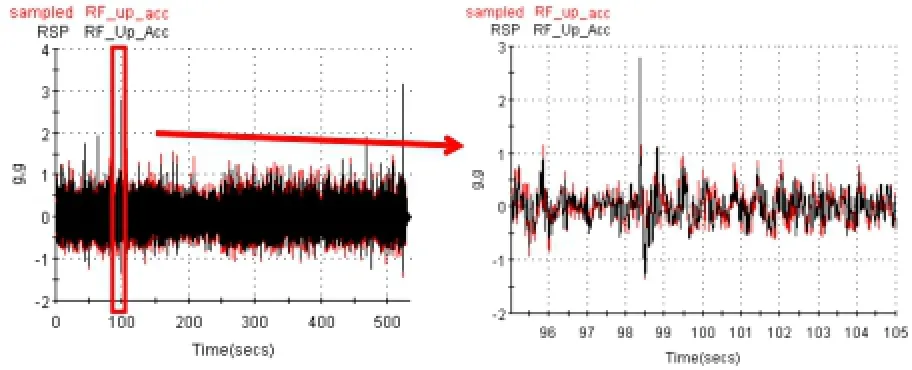
圖11 臺架響應和實際采集懸架上車身的垂直加速度對比
6 結論
本文對四立柱道路模擬試驗常用迭代信號的關系進行了分析,利用實際道路采集信號驗證了兩個比例關系:(1)彈簧應變與減振器位移變化量之間的比例關系;(2)彈簧應變與輪心和懸架上車身垂直加速度差值關于時間的二重積分的比例關系。在此基礎上,兼顧四立柱道路模擬精度和工作復雜度,本文提出以輪心垂直加速度和彈簧應變作為迭代控制點為一種較優的選擇方法,并通過具體的迭代試驗進行了驗證。
參考文獻:
[1] Ledesma, R., Jenaway, L., Wang, Y., and Shih, S ., Development of Accelerated Durability Tests for Commercial Vehicle Suspension Components, SAE Technical Paper 2005-01-3565.
[2] 耿永生. 整車道路模擬試驗控制技術[J].自動化應用,2011(3):28-31.
[3] 錢立軍,吳道俊,楊年炯等. 基于室內道路模擬技術的整車加速耐久性試驗的研究. 汽車工程,2011,33(2):91-96.
[4] 陳忠良,崔紅偉,駱紅云等. 室內整車可靠性道路模擬試驗方法. 北京汽車,2010,2(2):10-13.
[5] 汪斌,過學迅,李孟良等. 基于迭代學習控制的道路模擬算法. 汽車工程,2010, 32(8):686-689.
[6] 石鋒,王紅鋼,劉再生等. 路譜臺架試驗研究.振動與沖擊, 2012,31(19):10-14.
中圖分類號:U467.1
文獻標識碼:A
文章編號:1005-2550(2016)02-0088-05
doi:10.3969/j.issn.1005-2550.2016.02.015
收稿日期:2015-12-18
Research on Iteration Signals Selecting of Four-channel Road Simulation Test
ZHANG Ai-long, YI Si-wu, YU Zhen-tao, TENG Jin-xian
( National Automobile Quality Supervision and Test center (Xiangyang), Xiangyang 441004, China )
Abstract:Iteration process is used by four-channel road simulation test to match the vertical vibration status of vehicle. The more iteration control signals are used, the higher simulation accuracy will be, however that will lead to a more difficult iteration at the same time. Taking account of simulation accuracy, workload and iteration difficulty, how to select iteration control signals is researched by the paper. Firstly, relationship between generally used iteration control signals is analyzed and verificated; Then vertical acceleration at wheel centre and strain on damper spring are recommended as preferable iteration control signals. Finally, an actual four-channel road simulation test is used to verify the recommendation.
Key Words:four-channel road simulation; iteration control signals; signal analysis; iteration test