一種基于坐標變換的手勢識別算法及運用
2016-08-08 00:49:45齊彥甫劉文滔
桂林理工大學學報 2016年2期
齊彥甫,陳 以, 陳 輝,劉文滔,林 玲
(桂林電子科技大學 電子工程與自動化學院,廣西 桂林 541004)
?
一種基于坐標變換的手勢識別算法及運用
齊彥甫,陳以, 陳輝,劉文滔,林玲
(桂林電子科技大學 電子工程與自動化學院,廣西 桂林541004)
摘要:現有的手勢識別都是采用空間算法計算手勢的空間運動軌跡,模塊較多、算法復雜、成本較高;同時對于車載娛樂影音系統而言功能過于繁雜,而且成本高顯得華而不實。本文提出了一種基于坐標變換的手勢識別算法及其在實際車載娛樂影音系統的運用。此算法主要用于車載娛樂影音系統的手勢識別模塊,其特點是可迅速準確識別駕駛員的手勢狀態,使其在不影響駕駛的情況下,更加方便地進行娛樂影音系統的各種操作。
關鍵詞:手勢識別;車載娛樂影音系統;二維坐標;最小二乘法
隨著汽車保有量的迅速增加,人們對汽車安全的重視程度越來越高。車輛在行駛過程中,駕駛員操作車載GPS、DVD等娛樂系統時,必須騰出手來按鍵或者觸摸HMI界面點擊圖標,同時還要低頭查看操作界面,然后選擇所需求的功能,這樣在駕駛過程中會不可避免地產生安全隱患,嚴重者甚至會造成不可挽回的人身財產損失[1-3]。
而針對技術本身而言,現有的手勢識別都是采用空間算法計算手勢的空間運動軌跡,算法復雜、模塊較多、成本較高[4-6]。目前為止, 大多數研究都集中在靜態手勢識別技術,而動態識別技術不僅要對手勢進行跟蹤,還要進行識別,其難點主要是手勢目標檢測和識別[7];同時對于車載娛樂影音系統而言,功能過于繁雜而且成本較高顯得華而不實[8]。因此,在保證駕駛員安全駕駛的同時,為方便其對娛樂影音系統的操作,筆者提出了一種基于坐標變換的手勢識別算法,并在實際車載娛樂影音系統進行運用。此算法主要用于車載娛樂影音系統的手勢識別模塊,其特點是可低成本、迅速、準確地識別車主的手勢,如接近、離開、左滑、右滑等狀態,使駕乘人員在不影響駕駛的情況下,更加方便地進行娛樂影音系統的各種操作。
1系統硬件結構
算法應用于某款車載娛樂影音系統的硬件結構原理圖如圖1所示。手勢識別模塊選用3個ISL29004紅外傳感器,通過感應手勢變化觸發產生中斷,形成負脈沖下降沿信號,然后利用HUB芯片PCA9545將多路中斷集成一路輸出,采用IIC通信協議將數據傳輸到ARM9處理器進行處理。
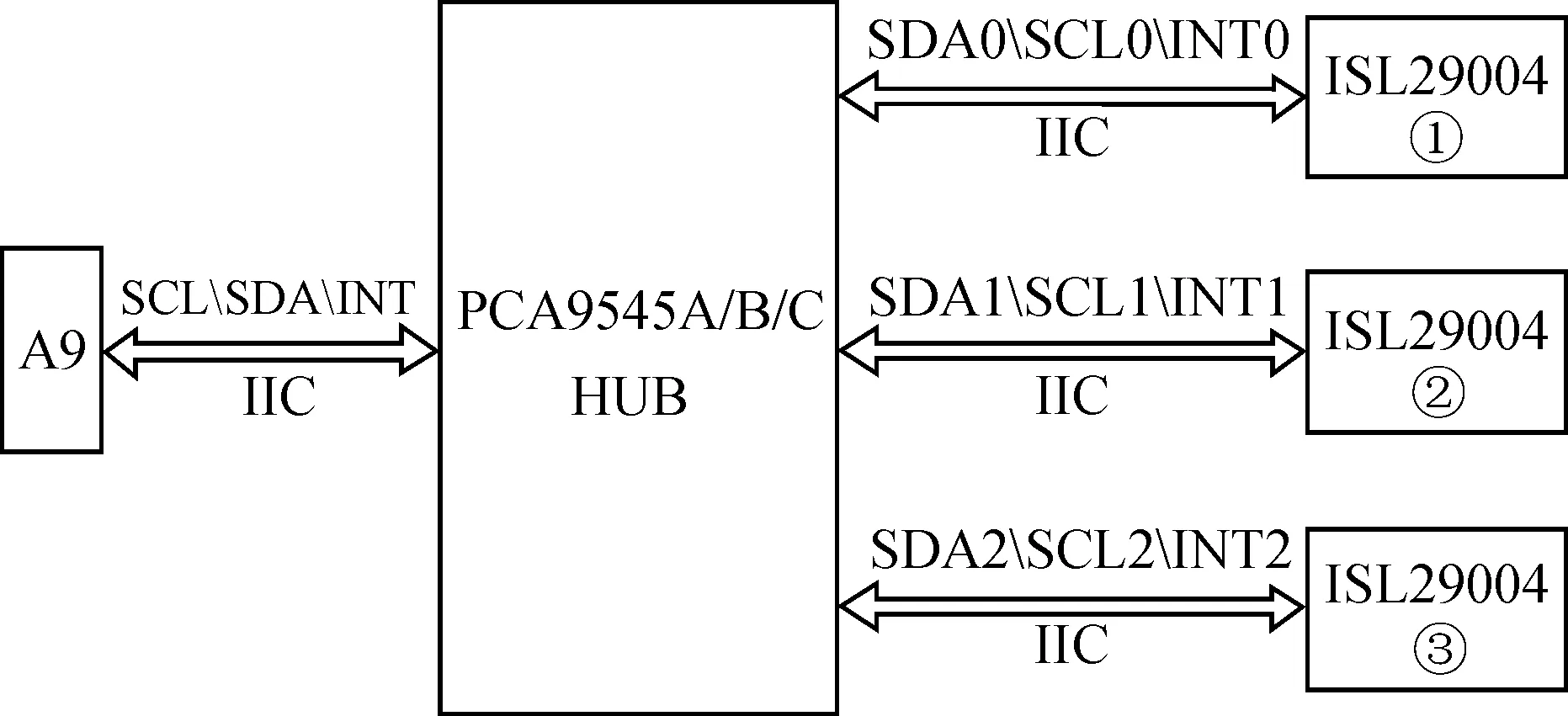
圖1 硬件原理框圖Fig.1 Block diagram of hardware
2手勢識別算法描述
2.1二維坐標系的建立
建立一個二維坐標系:x軸代表水平方向,z軸代表垂直方向,建立這樣的坐標系的目的在于可以將手勢的動作擬化到坐標系上。x軸可擬化為手勢的左滑和右滑,z軸可擬化為手勢的接近和離開,具體如圖2所示。
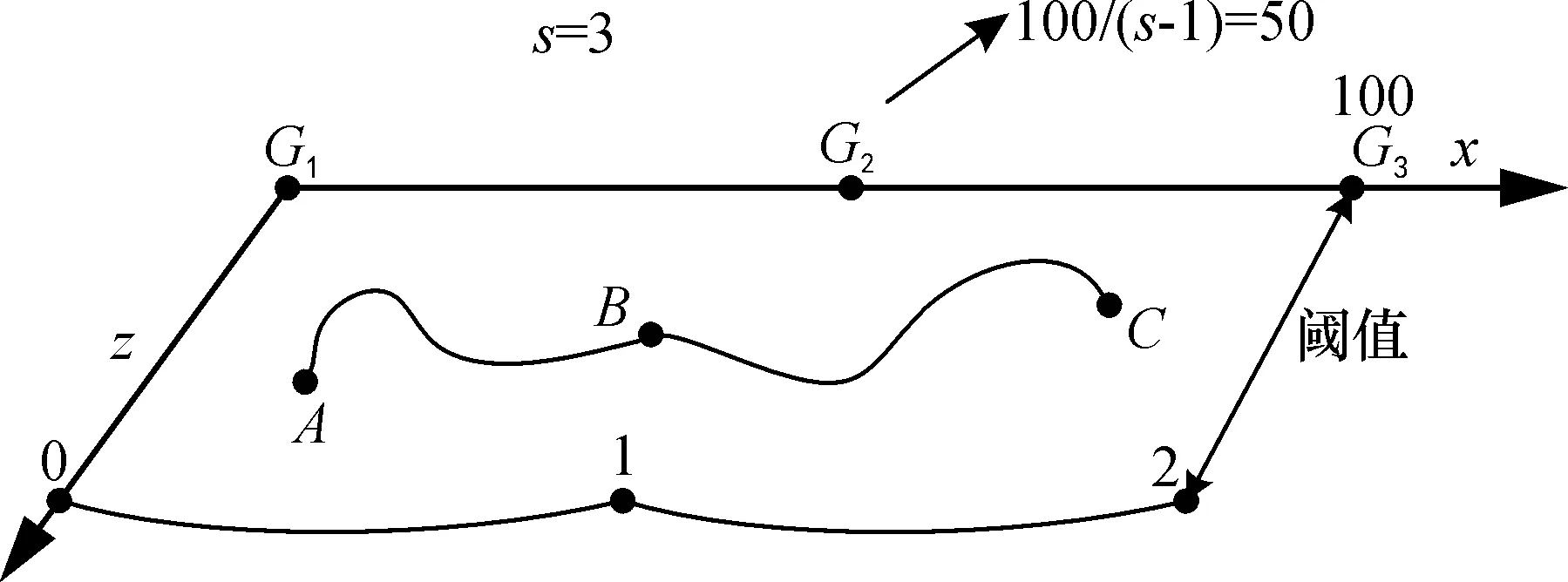
圖2 二維坐標變換圖Fig.2 Two-dimensional coordinate transformation diagram
為方便計算此硬件系統,選用3個紅外傳感器,可根據距離擬化標尺。其中G1、G2、G3分別代表紅外傳感器1、2、3的位置;0、1、2相連所繪制的曲線為紅外觸發中斷的閾值;ABC為模擬的手勢移動曲線;s為紅外傳感器的個數。
為提高手勢判斷精確性,需要盡可能多的數據來進行分析,因此采用定時器來設定采樣頻率。創建一個線程,然后設定一個定時器,固定頻率采樣。一旦觸發中斷,系統定時采樣,然后根據算法計算,判斷手勢動作。
2.2一維數據映射為二維坐標系(x, z)值方法
當中斷觸發,系統定時采集紅外數據。如圖3所示,以當前手勢在B點為例,采樣點數據有3個,即傳感器1值為m、傳感器2值為n、傳感器3值為p。設計算法如下:
(1)為方便等分換算, 將z軸G1G4段擬化為0~255,x軸G1G3段擬化為0~100坐標值的二維坐標系;
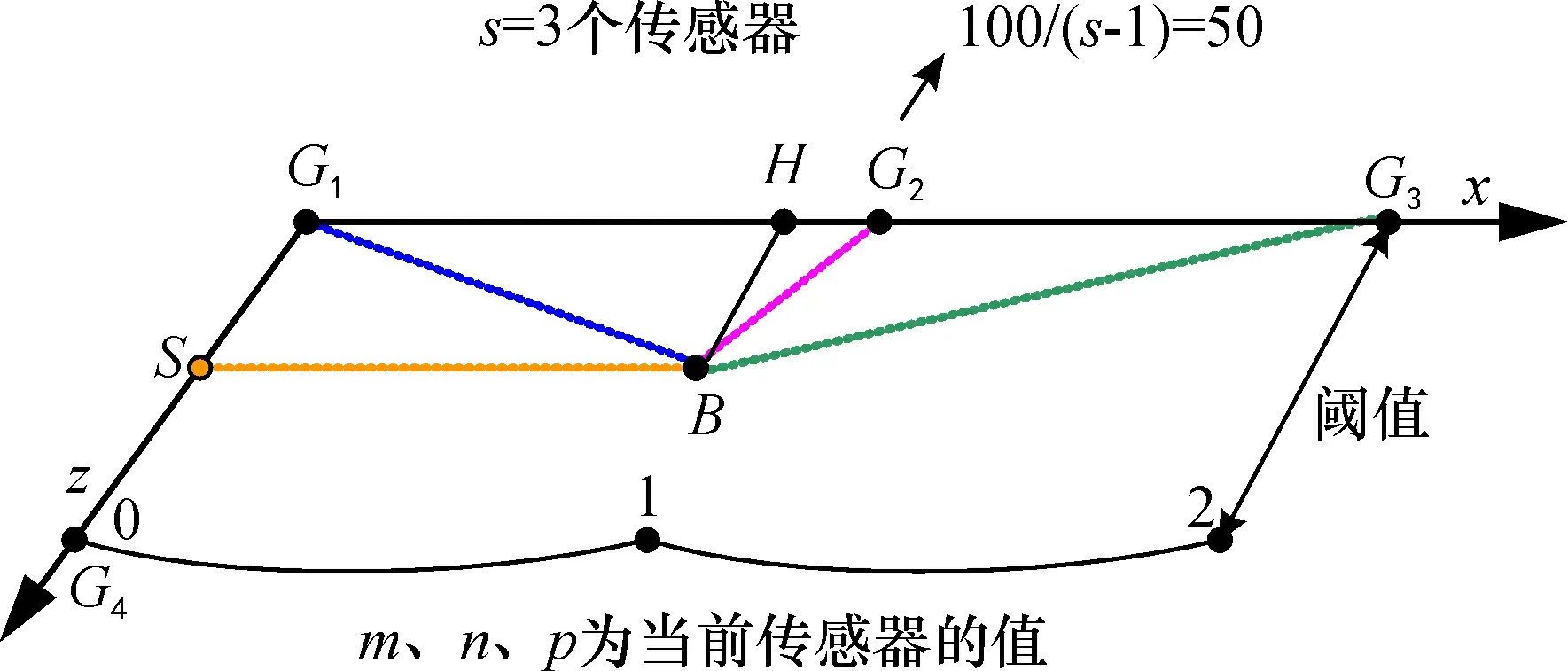
圖3 二維坐標變換原理圖Fig.3 Two-dimensional coordinate transformation principle diagram
(2)針對x軸的映射關系:
步驟1:觀測紅外值,有n>m>p(m、 n、 p為對應當前紅外傳感器的值);
步驟2:將手勢B定位在G1G2段范圍(忽略傳感器G3的影響);
步驟3:將手勢B點映射到x軸靠近G2;
步驟4:手勢B點映射到x軸的值為50n/(m+n)。n的數值是紅外傳感器G2輸出的數值,由于傳感器數值與感應距離成反比,將G1G2線段分成m+n等份,每份的值為1/(m+n), B點映射到x軸上的點為H, G1H段映射單位值為n/(m+n), HG2映射單位值為m/(m+n), 則B點映射到x軸的值為 G1H=50n/(m+n)。
(3)針對z軸的映射關系:
步驟1:取最大紅外傳感器的值n;
步驟2:手勢B點映射到z軸的值為100(1-n/255)。 由于傳感器數值與z軸感應距離成反比,將z軸的有效區域G1G4段255等分, 每份的值為1/255, B點映射到z軸上的點為S, 映射G1S段的單位值為(1-n/255), 則B點映射到z軸的值為100(1-n/255)。
3手勢識別判斷算法優化
3.1使用最小二乘法優化算法
考慮到紅外傳感器值浮動偏差,單純比較相鄰兩組數據的x、z軸的值很可能出現誤報,因此擬采用多組數據分析,然后通過最小二乘法將多組數據歸一化為最接近的一條直線,通過該直線的斜率來判斷手勢狀態。
最小二乘法擬化直線原理[7]:設x和y之間的函數關系為y=bx+a。式中有2個待定參數, b代表斜率, a代表截距。 對于等精度測量所得到的N組數據(xi, yi), 其中: i=1, 2, …, N; xi(采樣次數)值被認為是準確的, 所有的誤差只聯系著yi(x, z軸的值)。 利用最小二乘法把觀測數據擬合為直線。
用最小二乘法估計參數時, 要求觀測值yi的偏差的加權平方和為最小。 對于等精度觀測值的直線擬合來說, 可使下式的值最小:
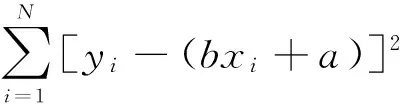
分別對上式a、 b求偏導,


整理后得到方程組:
方程組第一式乘以∑xi, 第二式乘以N, 然后相減,得

便可求得直線參數a和b的最佳估計值:


然后根據斜率b的大小來判斷滑動趨勢。
中斷觸發,系統定時采集一次紅外數據。假設采樣16次為1組數據,以x軸為例,建立與次數相關的二維坐標系,如圖4所示。

圖4 最小二乘法直線擬化Fig.4 Least squares method of line fitting
映射到x軸的值隨著采樣次數的增大而變化。采用最小二乘法將采集到的16組數據歸化為最接近的一條直線y=bx+a,通過斜率b來判斷手勢狀態:當b>0時,自左向右滑動;當b<0時,自右向左滑動。

3.2軟件算法原理及實際運用說明
軟件算法原理如圖5所示。其中傳感器采集到相關數據,然后經過此算法的處理,最終得出用戶需要輸入的準確命令,傳給HMI作相應的界面邏輯跳轉處理。
由于此項目硬件只采用3個傳感器,故x軸變量與采樣時的值不對應,需要建立映射關系,從右向左滑動時x軸的值變小,但實際采樣其數據是觸發哪個傳感器, 則相應的x值就出現峰值,其他的兩個傳感器x值很小。
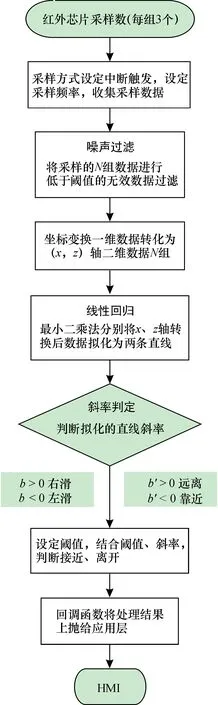
圖5 軟件算法原理Fig.5 Software algorithm schematic diagram
在實際運用中需要對此算法作如下說明:(1)此算法建模方法適用于紅外傳感器在車機上等距安裝的機型;(2)建模坐標系與實物有一定差距,建模時忽略紅外傳感器安裝位置與車機外沿的一段距離;(3)經過實車測試,在坐標系外圍的區域感應效果不明顯,考慮忽略,但不影響后續手勢數據分析,如z軸左側靠近G1和G3右側會有小部分區域有感應,設計算法時會采用優化方法處理;(4)經過實車測試,2個紅外傳感器覆蓋到的區域感應距離相應會有一定的疊加,實時傳感器數值會相對大一些,但效果不太明顯,設計算法時暫不考慮; (5)供應商提供的紅外芯片資料有提及該型號芯片對外界光源影響不太敏感,可忽略外界環境對數值影響。
4軟件設計
4.1系統軟件架構框圖
本文提出的手勢識別算法運用的系統軟件架構框圖如圖6所示。 手勢識別模塊采用3層驅動模型: APP、 MDD和PDD。 其中APP層: 主要是提供上層HMI應用接口, HMI通過相關的宏選擇開啟手勢識別功能; MDD層: 負責相關邏輯處理; PDD層: 負責處理數據轉化和相關算法優化并封裝成固定的接口供HMI調用, 同時也負責硬件相關配置, 如HUB芯片寄存器、 ISL29044A芯片寄存器等。
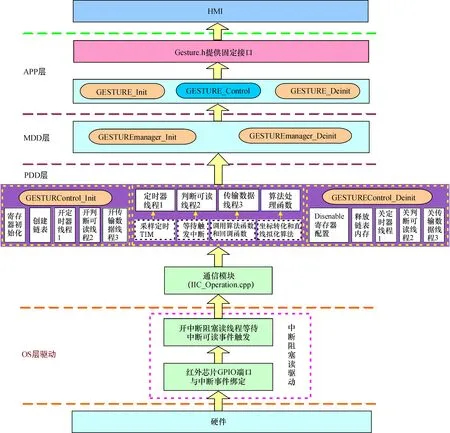
圖6 系統軟件架構Fig.6 System software architecture diagram
4.2系統用例圖
手勢識別算法運用的系統用例圖如圖7所示。當用戶上下左右前后滑動手勢的時候,手勢識別模塊能準確的識別到用戶當前的手勢,并通過相應的消息機制通知應用層作相應的動作響應。
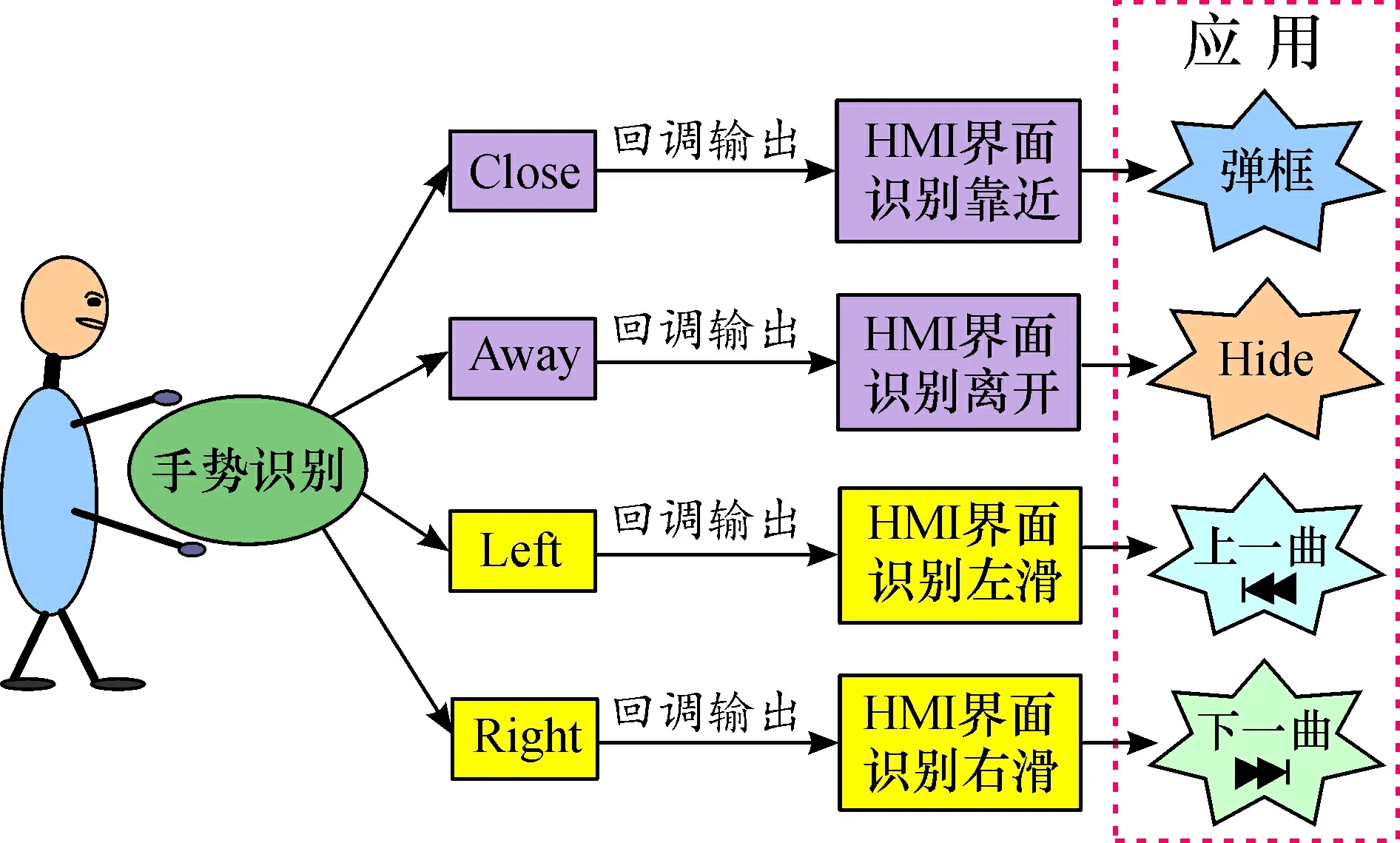
圖7 系統用例圖Fig.7 System use case diagram
4.3手勢識別基本邏輯
HMI與MW(中間件)交互流程圖如圖8所示。當手快速靠近傳感器時, 傳感器將觸發一次中斷致使HUB產生一個脈沖,然后通過IIC將采樣數據傳輸給ARM進行算法處理。
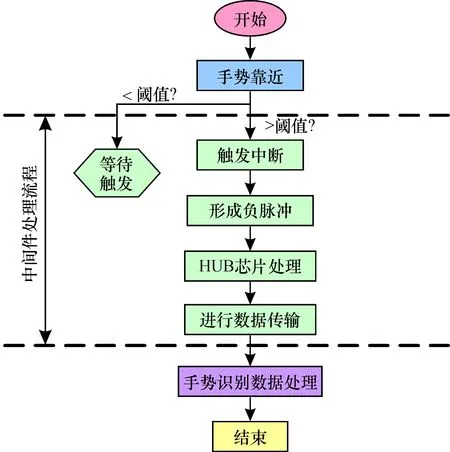
圖8 交互流程圖Fig.8 HMI and MW interaction flow diagram
4.4手勢識別固定接口描述
APP層固定接口Gesture_Control提供給HMI幾個固定接口函數, 包含: GESTURE_CTL_START開始; GESTURE_CTL_EXIT退出; GESTURE_CTL_SET_CALLBACK_FUNCTION回調; GESTURE_GET_CLOSE靠近; GESTURE_GET_AWAY離開;GESTURE_MOVE_LEFT左滑;GESTURE_MOVE_RIGHT右滑; GESTURE_MOVE_UP上滑;GESTURE_MOVE_DOWN下滑。
4.5系統相關類圖
實際編碼運用中編寫的相關類見圖9。 圖中是對系統相關類圖的介紹, 主要是系統實現所定義的函數以及函數接口的依賴, 其中主要有手勢函數的定義以及其對應的構造函數和析構函數, 手勢管理函數主要是對手勢的接近、 離開、 左滑、 右滑等狀態進行判斷并作出相應的處理。

圖9 相關類圖Fig.9 Related class diagram
4.6手勢識別總邏輯流程圖
綜上軟件設計,整理出如圖10所示的詳細的運用此算法的軟件邏輯流程圖。
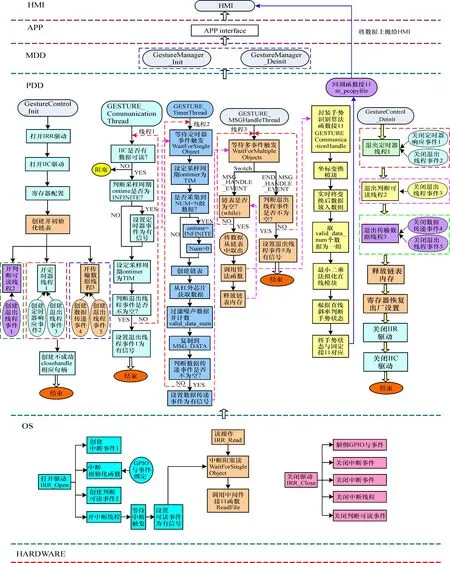
圖10 手勢識別軟件設計詳細邏輯流程Fig.10 Detailed logic flow chart gesture recognition software design
5結束語
本文算法目前主要用于車載娛樂影音系統的手勢識別模塊,其特點是可低成本迅速準確地識別駕駛員的手勢如接近、離開、左滑、右滑等狀態,使得駕駛員在不影響駕駛的情況下更加方便地進行娛樂影音系統的各種操作。從某大型汽車電子公司的售后跟蹤及反饋的數據看,此算法的運用受到了客戶的一致好評。
參考文獻:
[1]朱繼玉, 王西穎, 王威信, 等. 基于結構分析的手勢識別[J]. 計算機學報:自然科學版, 2006, 29(12): 2130-2137.
[2]周航, 阮秋琦. 基于表現特征的手勢識別[J]. 廣西師范大學學報:自然科學版, 2003, 2l(1):25-30.
[3]葛元, 郭興偉, 王林泉. 傅立葉描述子在手勢識別中的應用[J]. 計算機應用與軟件, 2005, 22(6): 12-13,92.
[4]路凱, 李小堅. 手勢識別研究概述[J]. 西安文理學院學報:自然科學版, 2006, 9(2): 91-94.
[5]張運德. 手勢識別技術的研究及應用[D]. 合肥: 安徽大學, 2013.
[6]李文生,解梅,鄧春健.基于多點手勢識別的人機交互技術框架[J].計算機工程與設計, 2011,32(6):2129-2133.
[7]馮志全, 蔣彥. 手勢識別研究綜述[J]. 濟南大學學報:自然科學版, 2013, 27(4): 336-341.
[8]孫麗娟, 張立材, 郭彩龍. 基于視覺的手勢識別技術[J]. 計算機技術與發展, 2008, 18(10): 214-216,221.
文章編號:1674-9057(2016)02-0395-07
doi:10.3969/j.issn.1674-9057.2016.02.035
收稿日期:2014-11-08
基金項目:廣西自然科學基金項目(2015GXNSFAA139299)
作者簡介:齊彥甫(1988—),男,碩士,研究方向:精密測量與智能控制。
通訊作者:陳以,教授,glcy1975@guet.edu.cn。
中圖分類號:TP368.1
文獻標志碼:A
Gesture recognition algorithm and application based on coordinate transformation
QI Yan-fu,CHEN Yi,CHEN Hui,LIU Wen-tao,LIN Ling
(School of Electronic Engineering and Automation,Guilin University of Electronic Technology, Guilin 541004,China)
Abstract:The present gesture recognition algorithms usually computes the space motion trajectory of gesture in 3D space, it includes not only many modules and algorithm complexity but also high cost. The function is too complicated and appears to be flashy without substance for in-car entertainment systems. This paper proposes a gesture recognition algorithm based on coordinate transformation and application of in-car entertainment systems. This algorithm is mainly used for gesture recognition module of in-car entertainment systems. The gesture state of the driver can be quickly and accurately identified without affecting driving and make various operations of entertainment system more convenient.
Key words:gesture recognition; in-car entertainment systems; two dimensional coordinate; the least square method
引文格式:齊彥甫,陳以, 陳輝,等.一種基于坐標變換的手勢識別算法及運用[J].桂林理工大學學報,2016,36(2):395-401.
