基于高程補償的BLUE算法在塔康中的應用研究
2016-08-15 08:10:09王金根陳治平趙溫波
系統工程與電子技術 2016年8期
關鍵詞:方法
盛 琥, 王金根, 陳治平, 曹 燕, 趙溫波
(陸軍軍官學院無人機系, 合肥 安徽 230031)
?
基于高程補償的BLUE算法在塔康中的應用研究
盛琥, 王金根, 陳治平, 曹燕, 趙溫波
(陸軍軍官學院無人機系, 合肥 安徽 230031)
基于塔康系統的斜距、方位和高程可對目標定位,但較大的量測誤差影響定位精度。為提高估計精度,研究塔康中最佳線性無偏估計(best linear unbiased estimation, BLUE)濾波器的實現。建立地面站對目標的量測模型,并分析量測轉換誤差特性,推導出對應的BLUE濾波模型;針對目標從地面站上空過頂時出現無效量測的問題,通過對高程量測補償的方法予以克服,解決傳統算法在強非線性量測下誤差較大的弊病。與經典方法的性能對比表明,改進算法有效地抑制了強非線性量測下的濾波發散,有很強的魯棒性和實時性。
塔康系統; 最佳線性無偏估計; 非線性濾波; 量測轉換
0 引 言
塔康系統根據斜距、方位和高程量測估計目標位置,采用濾波技術后可提高估計精度。由于塔康系統的量測相對目標狀態是非線性的,因此要解決非線性量測下的濾波跟蹤問題。針對該問題有幾種技術途徑:擴展卡爾曼濾波(extented Kalman filter, EKF)、無味濾波(unsented Kalman filter, UKF)[1]、粒子濾波(particle filter, PF)[2]和量測轉換(converted measurements Kalman filter,CMKF)等[3]。EKF將非線性函數在狀態預測值附近展開,舍棄高階項后濾波計算;雖然簡單直觀,但濾波精度不高。UKF對狀態模型做無味變換,再用變換后的估計量濾波以減小誤差;其優勢在于無需微分計算,依據非線性模型就能估計誤差統計特性;但這種基于高斯假設的方法的估計性能還不夠好,濾波效果受參數影響較大。PF通過尋找一組在狀態空間傳播的隨機樣本粒子,對后驗概率密度函數進行逼近,以樣本均值代替積分操作以獲得狀態的最小方差估計;該方法對非線性濾波問題有很強解決能力,但計算量大,實時性差。量測轉換方法提出較晚,但因為計算量小、精度高而受到廣泛關注。
量測轉換將非線性量測表達成直角坐標系的偽線性形式,并估計轉換誤差統計特性后濾波跟蹤,該方法針對雷達目標跟蹤產生諸多成果:文獻[3]提出從極坐標系或球坐標系轉換到直角坐標系中有一個加性的量測轉換偏差,需做去偏處理,并估計出偏差大小和去偏誤差協方差矩陣,稱為去偏量測轉換。文獻[4]得出量測轉換偏差的本質是乘性的且依賴于角度誤差特性,并擴展到量測噪聲對稱非高斯分布的情況,提出無偏量測轉換方法。文獻[5]指出文獻[4]存在轉換兼容問題,提出修正無偏量測轉換方法。文獻[6]指出前述方法的缺陷,提出最佳線性無偏估計(best linear unbiased estimation, BLUE)器。文獻[7]對非線性濾波方法(EKF、UKF、CMKF)比較后得出BLUE濾波器在計算量和跟蹤性能上最佳的結論。量測轉換還用于導航[8]、測角定位、測斜距變化率定位[9-10]以及多雷達定位中[11-15]。
綜上可見,現有非線性濾波方法中量測轉換的性能較好,其中BLUE濾波性能最佳[7],因此研究塔康中的BLUE濾波器實現。研究發現,塔康中的BLUE濾波器大多數情形下跟蹤良好,但目標從地面站上空過頂時,即強非線性量測下,量測方程容易失效,導致狀態估計不能收斂。下文分析塔康系統中量測轉換誤差的統計特性,估計BLUE濾波模型參數,用高程量測補償的方法解決其在強非線性量測下的濾波發散問題。
1 基于量測補償的自適應BLUE
本節分析塔康中各坐標軸的量測轉換誤差特性,估計BLUE濾波模型參數,針對目標從地面站上空過頂時的量測失效問題,通過對高程量測補償的方法予以克服,提出一種自適應BLUE濾波方法。
1.1塔康系統量測模型及誤差分析

(1)
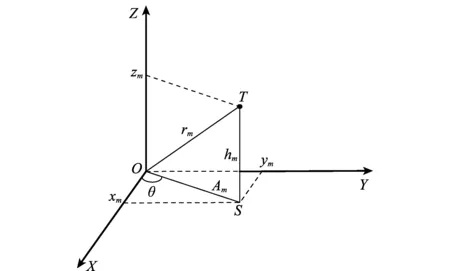
圖1 塔康導航系統量測示意圖
將方程組式(1)的非線性量測轉換到直角坐標系,有zk。
(2)
式中,Am為rm在XOY平面的投影,為簡化計算,先分析Am的誤差統計特性。
(3)

(4)
(5)
(6)

(7)
(8)

1.2基于高程補償的BLUE算法模型
推導BLUE模型參數前,先簡要介紹BLUE估計,它基于線性無偏最小方差準則,用于目標跟蹤時,有
(9)
(10)
式中

對于線性系統,其狀態方程為
(11)
(12)

針對出現的不合理量測,常規做法是舍棄無效量測,遞歸到下一時刻濾波估計,但容易導致濾波發散。為克服該問題,采取以下措施:BLUE濾波前根據目標當前位置,判斷rm>hm的出現概率,如果概率太低,則在高程量測加入偏置?h,使rm>hm出現概率增大,量測方程合理。另外要指出的是:補償斜距量測也可以達到同樣效果,但補償高程的方法得到的表達式最簡單。已知斜距r和高程h的情況下,rm>hm的概率為
(13)

(14)

(15)
對照組患者有效率為33.3%(10例),進步率為40.0%(12例),無效率為26.7%(8例),治療總有效率為73.3%(22例);實驗組患者有效率為66.7%(20例),進步率為30.0%(9例),無效率為3.3%(1例),治療總有效率為96.7%(29例)。實驗組患者治療效果高于對照組患者,組間比較;差異有統計學意義(x2=6.405,P<0.05)。
(16)
(17)
式中
(18)

(19)
(20)

(21)
由式(8)得到
(22)
結合式(18)計算S11
S11中與真實狀態x、y、z有關的量都用預測值代替,即
基于以上近似,計算S11近似值為
類似的得到其他元素的估計為
至此得到BLUE濾波模型中所有參數。
1.3自適應BLUE算法流程

(23)
(24)
(25)
塔康中BLUE算法濾波流程如圖2所示。
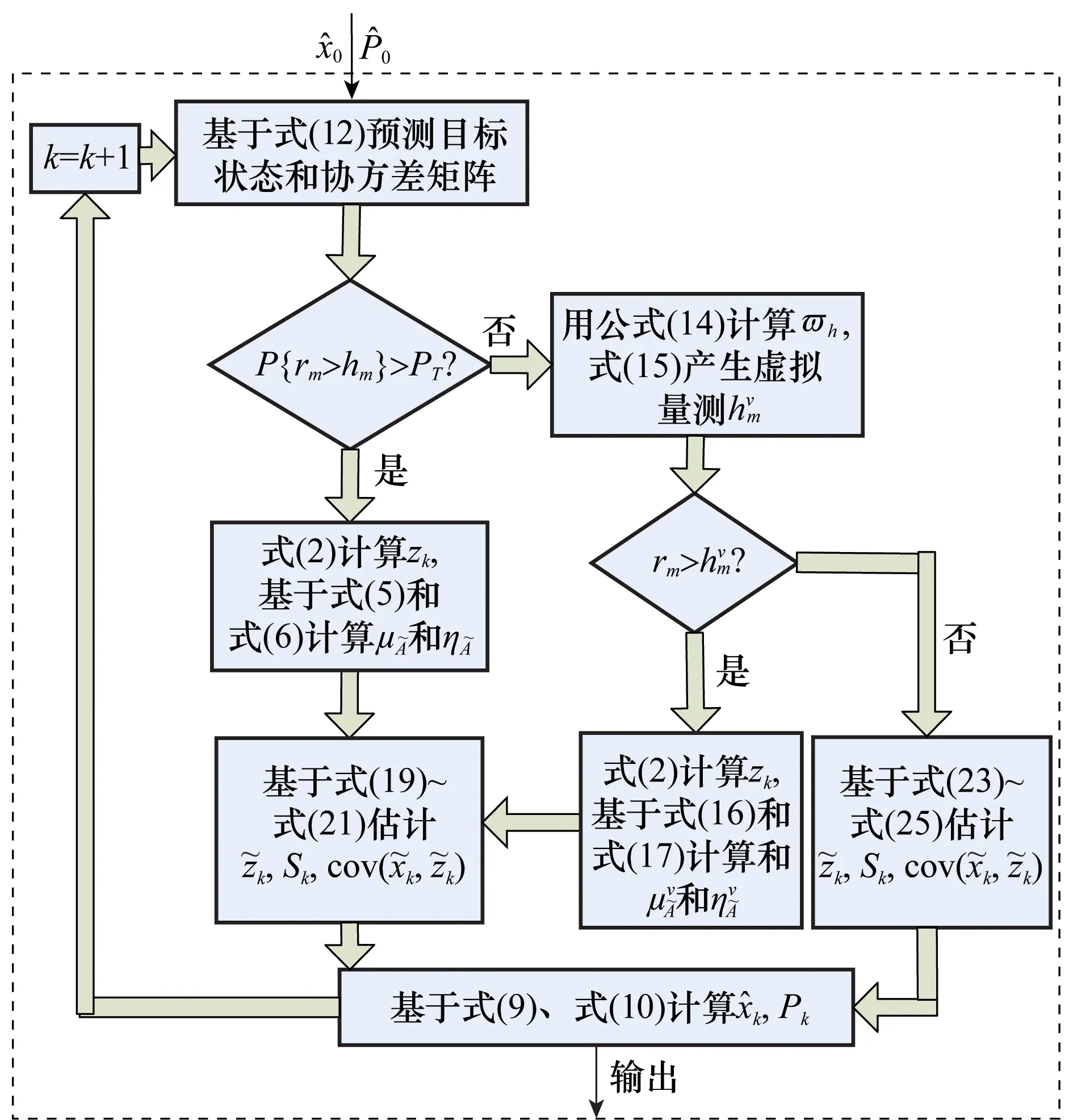
圖2 自適應BLUE濾波流程
2 仿真實驗與分析
為驗證所提算法的效果,以經典BLUE濾波器和量測轉換Kalman濾波器(converted measurement Kalman filter, CMKF)為參考檢驗性能。3種算法對遠場目標的跟蹤性能相似,因此僅測試對近場目標的跟蹤性能,具體設置如下:地面站位于原點,目標起始位置均值(-8,0.2,5)km,標準差(20,20,20)m,起始速度均值(80,0,0)m/s,標準差(2,2,2)m/s。假設目標運動中高度變化不大,沿各坐標軸的過程噪聲設置為(0.3,0.3,0.03)m/s2。斜距量測精度100 m,高程精度80 m,方位精度0.01。概率閾值PT=97.5%,置信區間ρT=1.96。采樣周期1s,仿真時長200s,仿真500次的結果如圖3所示。圖3(a)是仿真中各時刻無效量測出現概率分布圖。圖3(b)和圖3(c)是算法位置和速度跟蹤誤差對比。除以上參數,歸一化估計誤差均方值(averagenormalizedestimationerrorsquared,ANEES)[6]也是評估算法置信度的重要指標,ANEES為1時,濾波誤差和估計協方差陣匹配,濾波一致性最好。圖3(d)是算法ANEES對比圖。
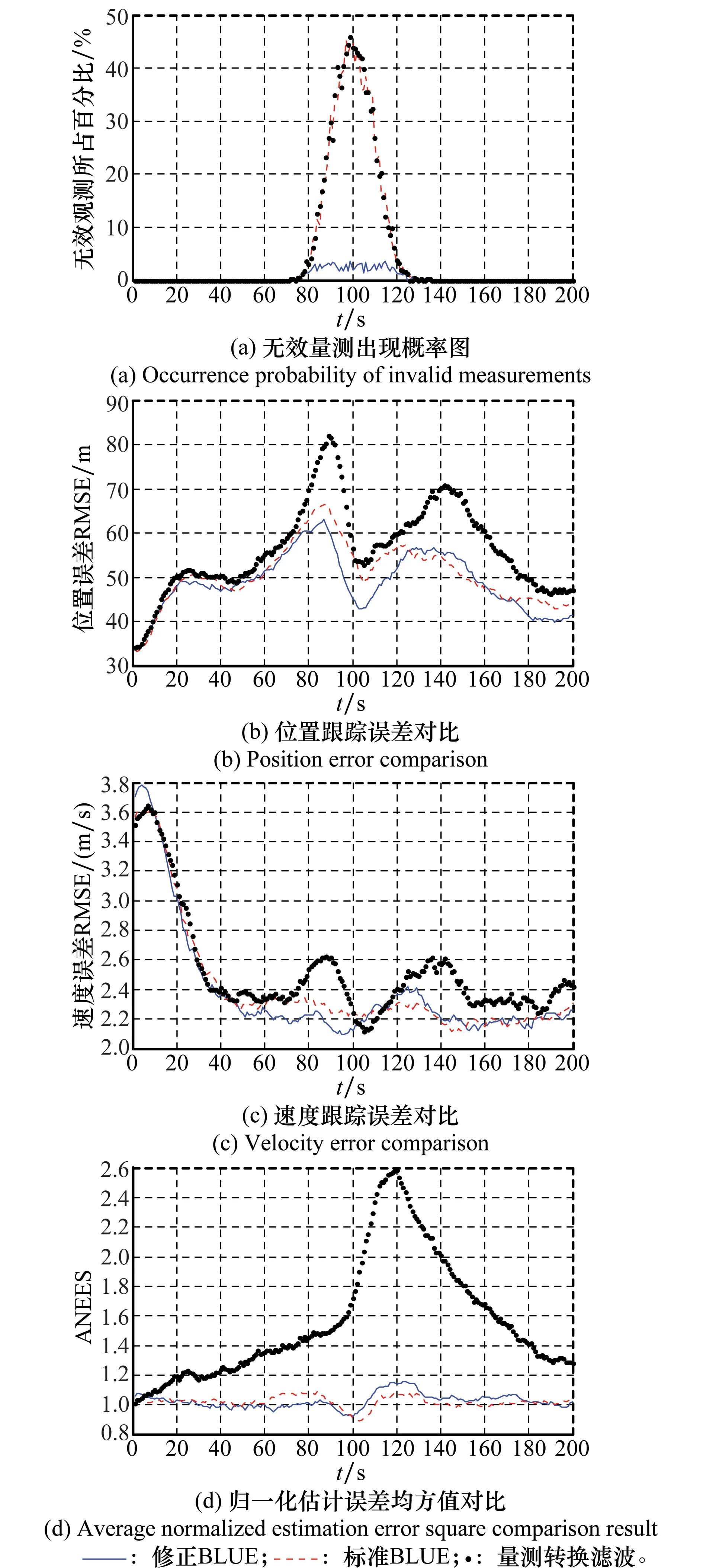
圖3 場景1的跟蹤仿真結果
在跟蹤過程的中段,目標以較大的概率從地面站上空飛過,此時容易出現無效量測。圖3(a)可見,目標位于地面站頂部時,BLUE算法得到的無效觀測的概率接近50%,而修正BLUE算法通過高程量測補償大大降低了無效量測的出現概率(約為2.5%,這與設置的概率閾值吻合)。由圖3(b)和圖3(c)中可見,無效量測轉換為有效量測后,顯著提高目標過頂時的跟蹤精度,另外由圖3(d)可見,修正BLUE算法的濾波一致性也很好(約等于1)。
為考察所提算法在不同狀態噪聲下的跟蹤性能,場景2中,其他條件不變,將沿各坐標軸的過程噪聲增大一個量級,設置為(1,1,0.1)m/s2,仿真500次的相關結果如圖4所示。
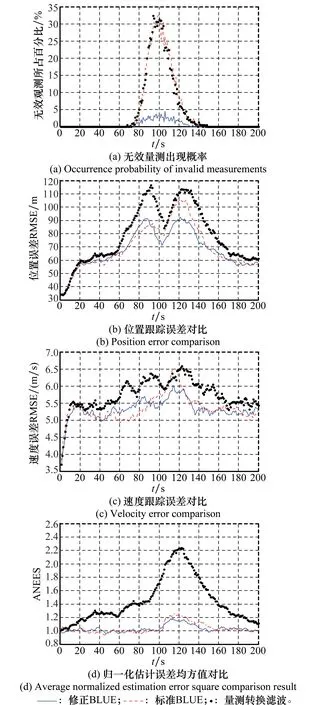
圖4 場景2的跟蹤仿真結果
由場景2仿真結果可見,增大狀態噪聲后,修正BLUE濾波器在跟蹤過頂目標時(即強非線性量測條件下)的估計精度和置信度等指標高于其他方法,證明算法有較好的魯棒性。除了估計精度和穩健性,計算復雜度也是性能評測所關心的指標,3種算法在奔騰雙核4 GHz計算機上,Matlab 7.11環境中蒙特卡羅仿真500次的運行時間分別如下。
由表1結果可見,修正BLUE濾波器每次跟蹤約需0.13 ms,計算量比標準BLUE高20%,比CMKF高60%,但濾波性能優于兩者;其他非線性方法(如UKF、PF)雖然性能較好,但計算量相比BLUE和CMKF會有量級上的差異[11],因此修正BLUE濾波方法的綜合表現優異,有很好的自適應性和實時性。
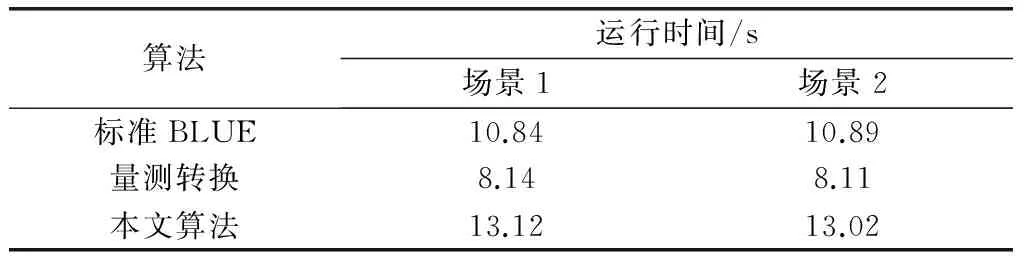
表1 各算法仿真500次的運行時間對比
3 結 論
BLUE濾波方法在雷達、聲吶等系統中已經得到應用,但在其他導航或定位系統中尚未推廣。本文分析塔康導航系統的誤差源和量測轉換誤差特性,推導出BLUE濾波模型參數,通過高程量測補償的方法克服無效量測出現時的估計發散問題,實現一種穩健高效的濾波方法。與其他非線性濾波方法的仿真對比表明,修正BLUE濾波器在不同狀態噪聲水平下對目標穩健跟蹤,在強非線性量測下的估計精度較高,且實時性較好,有廣闊的應用前景。
[1] Julier S J, Uhlmann J K. Reduced sigma point filters for the propagation of means and covariances through nonlinear transformations[C]∥Proc.oftheAmericanControlConference, 2002:887-892.
[2] Wang F S, Lu M Y, Zhao Q J, et al. Particle filtering algorithm[J].ChineseJournalofComputers,2014,37(8):1679-1695.(王法勝,魯明羽,趙清杰,等.粒子濾波算法[J].計算機學報,2014,37(8):1679-1695.)
[3] Lerro D, Bar-Shalom Y. Tracking with debiased consistent converted measurements vs. EKF[J].IEEETrans.onAerospaceandElectronicsSystems, 1993, 29(3):1015-1022.
[4] Mo L B, Song X Q, Zhou Y Y, et al. Unbiased converted measurements for tracking[J].IEEETrans.onAerospaceandElectronicsSystems, 1998, 34(3):1023-1027.
[5] Duan Z S, Han C Z, Li X R. Comments on unbiased converted measurements for tracking[J].IEEETrans.onAerospaceandElectronicsSystems, 2004, 40(4):1374-1377.
[6] Zhao Z L. Best linear unbiased filtering with nonlinear measurements for target tracking[J].IEEETrans.onAerospaceandElectronicsSystems, 2004, 40(4):1324-1336.
[7] Katkuri J R, Jilkov V P. A comparative study of nonlinear filters for target tracking in mixed coordinates[C]∥Proc.ofthe42ndSoutheasternSymposiumonSystemTheory, 2010: 202-207.
[8] Bordonaro S V, Bias P W. Elimination in tracking with converted position and Doppler measurements[C]∥Proc.ofthe51stIEEEConferenceonDecisionandControl, 2012:4089-4094.
[9] Bordonaro S V,Yaakov Bar-Shalom P W, Unbiased tracking with converted measurements[C]∥Proc.oftheIEEERadarConference, 2012:741-745.
[10] Spitzmiller J N. Tracking with spherical-estimate-conditioned debiased converted measurements[C]∥Proc.oftheIEEERadarConference, 2010:134-139.
[11] Sheng H, Wang J G, Wang L M, et al. Application of converted measurements Kalman filter in TACAN navigation[J].JournalofSignalProcessing, 2015,31(1): 34-38.(盛琥,王金根,王立明,等. 量測轉換卡爾曼濾波在塔康導航中的應用[J].信號處理, 2015,31(1): 34-38.)
[12] Bordonaro S, Willett P, Bar-Shalom Y. Decorrelated unbiased converted measurement Kalman filter[J].IEEETrans.onAerospaceandElectronicsSystems, 2014:50(2): 1431-1444.
[13] Zhou G J, Pelletier M, Kirubarajan T, et al. Statically fused converted position and Doppler measurement Kalman filters[J].IEEETrans.onAerospaceandElectronicsSystems,2014:50(1):300-318.
[14] Mao Y H, Li X R, Duan Z S. Unbiased measurement model conversion for tracking with multiple radars or sonar[C]∥Proc.ofthe31stChineseControlConference, 2012: 897-903.
[15] Sheng H, Zhao W B, Wang L M, et al. Maneuvering target tracking algorithm based on converted measurement and input estimation[J].SystemsEngineeringandElectronics, 2015,37(1): 31-36.(盛琥,趙溫波,王立明,等. 基于量測轉換與輸入估計的機動目標跟蹤算法[J].系統工程與電子技術, 2015,37(1): 31-36.)
Application research of altitude compensation based BLUE algorithm in TACAN
SHENG Hu, WANG Jin-gen, CHEN Zhi-ping, CAO Yan, ZHAO Wen-bo
(Unmanned Aerial Vehicle Department, Army Officer Academy, Hefei 230031, China)
Target position can be located with tactical air navigation (TACAN) system’s range, azimuth and altitude measurements, but the location precision is unfavorable because of large measurement errors. For the purpose of decreasing location errors, the implementation of the best linear unbiased estimator (BLUE) filter in the TACAN system is investigated. After building the measurement model of target positioning and analyzing the statistics characteristic of converted measurement errors, a corresponding BLUE filter model is derived. To circumvent the possible occurrence of invalid measurements, an altitude compensation technique is proposed to decrease estimation errors in strong nonlinearity cases. Simulation comparisons with other classical algorithms show the adaptive BLUE filter can solve the measurement ineffectiveness problem and overcome filter divergence effectively for short-range target tracking, thus proving its superiority over others in robustness and efficiency.
tactical air navigation (TACAN) system; best linear unbiased estimation; nonlinear filtering; converted measurements
2015-11-05;
2016-02-27;網絡優先出版日期:2016-06-07。
國家自然科學基金(61273001);安徽省自然科學青年基金(1208085QF109)資助課題
TN 966
A
10.3969/j.issn.1001-506X.2016.08.07
盛琥(1980-),男,講師,博士,主要研究方向為衛星導航、無源定位、機動目標跟蹤。
E-mail:tigersh_2000@aliyun.com
王金根(1972-),男,副教授,博士,主要研究方向為SAR成像技術。
E-mail:wjg1288@sina.com
陳治平(1967-),男,教授,博士,主要研究方向為無線電偵察。
E-mail:czp1967@sina.com
曹燕(1977-),女,講師,碩士,主要研究方向為新型計算機控制系統與控制網絡。
E-mail:cy961102@163.com
趙溫波(1972-),男,副教授,博士,主要研究方向為目標跟蹤理論。
E-mail:896355034@163.com
網絡優先出版地址:http://www.cnki.net/kcms/detail/11.2422.TN.20160607.1605.018.html
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56