基于Targetlink自動代碼生成的混合動力汽車巡航控制策略
2016-08-16 06:03:47單金榮張新豐周文太同濟(jì)大學(xué)汽車學(xué)院上海0804科力遠(yuǎn)混合動力技術(shù)有限公司上海分公司上海050
汽車科技 2016年4期
單金榮,張新豐 ,周文太(. 同濟(jì)大學(xué)汽車學(xué)院,上海 0804;. 科力遠(yuǎn)混合動力技術(shù)有限公司上海分公司,上海050)
基于Targetlink自動代碼生成的混合動力汽車巡航控制策略
單金榮1,2,張新豐1,周文太2
(1. 同濟(jì)大學(xué)汽車學(xué)院,上海 201804;2. 科力遠(yuǎn)混合動力技術(shù)有限公司上海分公司,上海201501)
為了縮短混合動力汽車巡航控制策略的開發(fā)周期從而達(dá)到有效降低開發(fā)成本的目的,使用MATLAB/Simulink和dSPACE/Targetlink工具采用基于模型的設(shè)計(jì),根據(jù)混合動力汽車動力系統(tǒng)特點(diǎn),設(shè)計(jì)了混合動力系統(tǒng)與巡航控制相結(jié)合的協(xié)同控制算法,完成了混合動力巡航控制策略建模和自動代碼生成,并把生成的高效C代碼下載到產(chǎn)品級控制器中,實(shí)現(xiàn)了混合動力汽車不同工況下的智能巡航控制。試驗(yàn)結(jié)果表明,車輛各工況下的巡航車速穩(wěn)定控制在目標(biāo)需求范圍內(nèi),達(dá)到了設(shè)計(jì)要求;通過采用自動代碼生成技術(shù)大大縮短了開發(fā)周期,提高了系統(tǒng)開發(fā)效率。
電動汽車;控制策略;自動代碼生成;巡航
單金榮
同濟(jì)大學(xué)汽車學(xué)院,在讀碩士,科力遠(yuǎn)混合動力技術(shù)有限公司上海分公司,主管工程師,主要從事混合動力系統(tǒng)開發(fā)工作。
1 前言
巡航控制(Cruise Control System簡稱CCS)技術(shù)經(jīng)過半個(gè)多世紀(jì)的發(fā)展,其基于傳統(tǒng)內(nèi)燃機(jī)的控制技術(shù)已趨于成熟,混合動力汽車作為新型動力節(jié)能裝置改變了傳統(tǒng)汽車動力系統(tǒng)結(jié)構(gòu),基于傳統(tǒng)內(nèi)燃機(jī)的巡航控制技術(shù)已不再適用,如何將電動汽車控制技術(shù)與巡航控制技術(shù)有機(jī)結(jié)合,實(shí)現(xiàn)二者協(xié)調(diào)工作是系統(tǒng)開發(fā)者要解決的。
傳統(tǒng)的汽車電控系統(tǒng)開發(fā)采用串行模式[1],通過硬件設(shè)計(jì)、手寫代碼和臺架試驗(yàn)進(jìn)行控制策略開發(fā)、驗(yàn)證,該模式最大缺點(diǎn)是代碼可移植性差、系統(tǒng)開發(fā)周期長,無法滿足當(dāng)前激烈的市場競爭。本文采用計(jì)算機(jī)輔助設(shè)計(jì)并行開發(fā)模式[2],軟件設(shè)計(jì)及離線仿真都可以不依賴于硬件,利用圖形化建模和自動代碼生成工具(Targetlink或Embedded coder)將混合動力巡航控制策略變成高效的C代碼,并編譯下載到目標(biāo)控制器中,實(shí)現(xiàn)混合動力系統(tǒng)巡航控制。相比傳統(tǒng)電控系統(tǒng)開發(fā),具有開發(fā)周期短、效率高的特點(diǎn)。
2 基于模型的設(shè)計(jì)
某混合動力汽車動力系統(tǒng)結(jié)構(gòu)如圖1所示,該動力系統(tǒng)是一個(gè)嚴(yán)格意義上的無極變速機(jī)構(gòu)(e-CVT)[3],其主要由改進(jìn)型的拉維奈爾赫式四軸雙行星排齒輪機(jī)構(gòu)[4]、雙電機(jī)和減速機(jī)構(gòu)等組成。
拉維奈爾赫式齒輪機(jī)構(gòu)各主要元件通過與動力部件發(fā)動機(jī)、驅(qū)動電機(jī)、發(fā)電機(jī)和輸出軸的剛性相連,組成了某混合動力汽車動力系統(tǒng)。其中,發(fā)動機(jī)與齒輪機(jī)構(gòu)的行星架相連,發(fā)電機(jī)與小太陽輪相連,驅(qū)動電機(jī)與大太陽輪相連,齒圈與無級變速箱輸出軸相連。根據(jù)雙行星排結(jié)構(gòu)特性建立行星排各軸扭矩方程:
扭矩平衡方程:
其中,Tc、Jc、αc、Tice分別為行星架扭矩、轉(zhuǎn)動慣量及加速度、發(fā)動機(jī)扭矩,Ts1、Js1、αs1、Tge分別為小太陽輪扭轉(zhuǎn)、轉(zhuǎn)動慣量及加速度、發(fā)電機(jī)扭矩,Ts2、Js2、αs2、Tdr分 別為大太陽輪扭轉(zhuǎn)、轉(zhuǎn)動慣量及加速度、驅(qū)動電機(jī)扭矩,Tr、Jr、αr、Tout分別為齒圈扭矩、轉(zhuǎn)動慣量及加速度、輸出軸扭矩,i1、i2為前行星排及后行星排傳動比,其值為3.2和2.4。各軸轉(zhuǎn)速方程:
式中,ns1、ns2、nc、nr分別為小太陽輪、大太陽輪、行星架、齒圈轉(zhuǎn)速。各軸加速度方程:
式中i表示行星齒輪傳動比,as1、as2、ac、ar為小太陽輪、大太陽輪、行星架、齒圈的加速度。
公式1-1~1-10體現(xiàn)了雙行星排動力機(jī)構(gòu)各元件的扭矩、轉(zhuǎn)速、功率平衡關(guān)系,是任何狀態(tài)下該動力系統(tǒng)各動力部件都要滿足的固有特性方程。因此,雙行星排動力系統(tǒng)的控制就轉(zhuǎn)變?yōu)椴煌到y(tǒng)輸入條件下瞬態(tài)方程的解耦計(jì)算。
發(fā)動機(jī)作為混合動力汽車巡航控制系統(tǒng)的主要?jiǎng)恿υ粗唬绕湓谥懈咚傺埠綍r(shí),是主要的控制對象,系統(tǒng)控制策略也主要是圍繞發(fā)動機(jī)最優(yōu)控制展開的[5],根據(jù)當(dāng)前電池能力建立發(fā)動機(jī)需求扭矩方程:
式中,Tice為發(fā)動機(jī)需求扭矩,Tmem是 上一個(gè)步長的發(fā)動機(jī)扭矩,PBchg為 當(dāng)前動力電池允許充電功率,PBout為當(dāng)前動力電池實(shí)際發(fā)生功率,Kp為算法系數(shù) ωice是 發(fā)動機(jī)曲軸旋轉(zhuǎn)角速度(rad/s)。
電機(jī)作為電動汽車電氣驅(qū)動系統(tǒng)的核心,是把電能轉(zhuǎn)換為機(jī)械能的動力部件,本文所基于的某混合動力汽車采用永磁同步電機(jī),具有控制精度高、功率密度大、效率高、轉(zhuǎn)矩脈動小、體積小和重量輕等優(yōu)點(diǎn)[6]。根據(jù)雙行星排四軸結(jié)構(gòu)可知,已知任意兩軸特性參數(shù)就可以計(jì)算出剩余兩軸的參數(shù),因此經(jīng)公式1-2~1-5推導(dǎo)出的發(fā)電機(jī)、驅(qū)動電機(jī)扭矩方程為:
進(jìn)一步行食管電生理檢查,予心房S1S2程序刺激,設(shè)置S1S1間期為400 ms,S1S2間期為360 ms,S1S2間期每次遞減10 ms,可誘發(fā)出心動過速,誘發(fā)窗口為S1S2 400/280 ms,誘發(fā)出心動過速與自發(fā)心動過速一致(圖4),予頻率為250 次/min的S1S1連續(xù)刺激可終止心動過速。期間患兒未訴心前區(qū)不適,無頭暈、黑蒙、暈厥,無嘔吐等不適。考慮患兒年齡小,為首次發(fā)作,但發(fā)作時(shí)心率明顯增快,遂予酒石酸美托洛爾片10 mg/d口服以預(yù)防心動過速發(fā)作,定期門診隨訪,必要時(shí)行射頻消融術(shù)。隨訪半年,無復(fù)發(fā)。
式中ωc為行星架角速度,rc為 行星架旋轉(zhuǎn)半徑ωs1ωs2分別是小太陽輪、大太陽輪角速度,rs1、rs2分別為小太陽輪、大太陽輪半徑。
3 巡航控制策略
本文的混合動力系統(tǒng)巡航控制擬采用車速閉環(huán)PID變參數(shù)控制方法,通過將當(dāng)前車速和設(shè)定車速的差值線性放大、積分和微分等數(shù)值處理,得到整車巡航狀態(tài)下驅(qū)動需求扭矩Tr,再經(jīng)巡航扭矩分流算法得到行星排各動力部件扭矩,通過各動力部件扭矩的執(zhí)行最終實(shí)現(xiàn)混合動力汽車巡航駕駛。PID控制器原理如圖2所示:
根據(jù)該雙行星排混合動力系統(tǒng)特點(diǎn),設(shè)計(jì)巡航狀態(tài)下整車工作模式有純電動模式、發(fā)動機(jī)起動模式、混合動力模式、發(fā)動機(jī)停機(jī)模式。模式轉(zhuǎn)換示意圖如圖3所示:
限于篇幅這里選取混合動力系統(tǒng)中高速巡航時(shí)較為典型的整車混動模式進(jìn)行巡航控制策略設(shè)計(jì),混合動力模式下雙行星排等效杠桿圖如4所示。從圖可知該模式下杠桿位置有多種,杠桿位置取決于整車車速、電池荷電狀態(tài)等因素。
混合動力巡航模式下系統(tǒng)控制的重點(diǎn)為發(fā)動機(jī)控制。巡航駕駛時(shí)系統(tǒng)根據(jù)當(dāng)前齒圈轉(zhuǎn)速nr、輸出軸期望扭矩Tr,通過查發(fā)動機(jī)特性曲線得到混動巡航模式下發(fā)動機(jī)的期望轉(zhuǎn)速、期望轉(zhuǎn)矩,如圖5所示為發(fā)動機(jī)特性脈譜圖。
考慮混動工況下動力電池荷電狀態(tài)SOC的均衡控制及電池、電機(jī)能力,對發(fā)動機(jī)期望轉(zhuǎn)矩、輸出軸期望扭矩Tr進(jìn)行修正,在SOC較高時(shí)控制系
統(tǒng)給動力電池少充電或不充電,在SOC較低時(shí)提高發(fā)動機(jī)期望扭矩,給動力電池多充電,得到修正后的發(fā)動機(jī)期望扭矩Tice'和修正后的輸出軸期望扭矩Tr'。利用公式1-12、1-13計(jì)算出驅(qū)動電機(jī)和發(fā)電機(jī)扭矩,再經(jīng)CAN總線把發(fā)動機(jī)扭矩發(fā)送給發(fā)動機(jī)控制單元(EMS),把電機(jī)期望扭矩發(fā)送給電機(jī)控制單元(MCU),最終實(shí)現(xiàn)整車混合動力巡航狀態(tài)下驅(qū)動行駛,圖6為混動模式下巡航控制流程圖:
4 自動代碼生成
dSPACE的Targetlink是一款用于自動代碼生成的工具,能夠?qū)⒂蒑ATLAB/Simulink/Stateflow等圖形化軟件開發(fā)工具所建立的控制模型快速生成產(chǎn)品級代碼,生成的代碼可讀性好,可靠性高[7]。圖8為基于Targetlink的自動代碼生成流程圖:
Targetlink自動代碼生成是基于模型的代碼生成,模型的建立可以基于MATLAB/Simulink搭建(生成代碼前需轉(zhuǎn)換為Targetlink格式),也可以利用Targetlink環(huán)境下的模塊庫直接建模。為了檢驗(yàn)變量定標(biāo)、模型效能檢測和代碼生成環(huán)境設(shè)置可以對模型執(zhí)行離線仿真,也稱為模型在環(huán)(MIL);一旦模型在環(huán)測試通過,就可以進(jìn)行自動代碼生成。為了檢驗(yàn)?zāi)P头抡骐A段所設(shè)定的定標(biāo)精度、范圍是否合適,可以進(jìn)行飽和度和溢出檢測,也叫軟件在環(huán)(SIL);為了進(jìn)一步優(yōu)化代碼和檢驗(yàn)控制器硬件設(shè)計(jì)生成,可以對高級C代碼進(jìn)行處理器在環(huán)(PIL)測試。經(jīng)過測試、優(yōu)化后的代碼就可以與控制器底層代碼集成編譯、鏈接,生成可執(zhí)行文件,下載到目標(biāo)控制器中。
4.1模型轉(zhuǎn)換
由第3節(jié)的圖1.7可知,巡航控制算法模型是在MATLAB/Simulink環(huán)境下搭建的,不能直接用于Targetlink代碼生成,需進(jìn)行模型轉(zhuǎn)換,把MATLAB環(huán)境下的數(shù)據(jù)類型從浮點(diǎn)數(shù)變成定點(diǎn)數(shù),便于微處理器進(jìn)行定點(diǎn)存儲和計(jì)算。轉(zhuǎn)換后的Targetlink模型如圖9所示:
4.2變量定標(biāo)
模型轉(zhuǎn)換為Targetlink格式后為獲得數(shù)據(jù)的定點(diǎn)存儲和計(jì)算,需對算法模型中所有變量進(jìn)行精度和大小設(shè)置,此過程即“變量定標(biāo)”。Targetlink定標(biāo)所基于的數(shù)值算法原理為:
其中Y為變量,a是對應(yīng)y的最低有效位,y0是設(shè)定的偏移。Targetlink軟件能夠提供a的定標(biāo)方式有三種:2的冪數(shù)定標(biāo);任意定標(biāo);含0偏和不含0偏。三種定標(biāo)方式的優(yōu)缺點(diǎn)如表1所示:
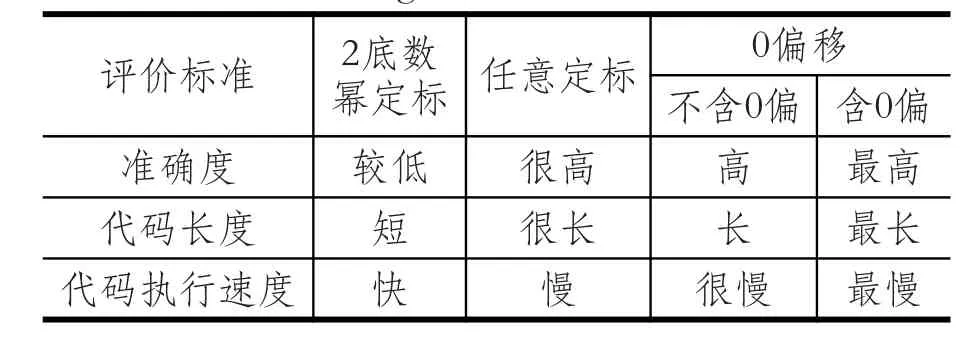
表1 Targetlink定標(biāo)方式比較
從表1可知,2底數(shù)冪定標(biāo)方式代碼長度最短,因此代碼執(zhí)行速度最快,而含0偏的任意定標(biāo)精確度最高,但由于代碼太長,代碼執(zhí)行速度最慢。因此控制模型的變量定標(biāo)要結(jié)合不同系統(tǒng)的特點(diǎn),在精度和實(shí)時(shí)性(代碼速率)上做取舍,以期達(dá)到最佳的軟件控制效果。所以本文依據(jù)電動汽車巡航控制對系統(tǒng)算法實(shí)時(shí)性比準(zhǔn)確度要高的特點(diǎn),盡量選用2底數(shù)冪定標(biāo)而不選用含0偏的任意定標(biāo)方式。
5 試驗(yàn)驗(yàn)證
混合動力巡航控制策略由圖形化模型轉(zhuǎn)換為C代碼后,與整車控制器底層代碼集成、編譯和鏈接后生成可執(zhí)行文件,并下載到目標(biāo)控制器中。本文采用ETAS的INCA作為標(biāo)定工具,基于XCP協(xié)議完成電動汽車巡航控制系統(tǒng)參數(shù)MAP標(biāo)定,在某款混合動力汽車上實(shí)現(xiàn)智能巡航控制。巡航控制策略整車試驗(yàn)驗(yàn)證曲線如圖10~12所示:
從圖10可知當(dāng)前車速能較好的跟隨巡航目標(biāo)車速(穩(wěn)態(tài)誤差在2km/h以內(nèi))。工況開始階段由駕駛員操控車輛,車速從0緩慢加大到60km/h,進(jìn)入混合動力巡航工況后駕駛員操作持續(xù)加按鈕(RESET)和持續(xù)減鍵SET后車速持續(xù)加速和減速,系統(tǒng)運(yùn)行在巡航加速和巡航減速的工況(5000~15000秒之間);當(dāng)持續(xù)短按加減速按鈕時(shí),系統(tǒng)則以一定的速率(如2km/h)加減車速。
圖11中為不同工況下巡航需求扭矩與實(shí)際執(zhí)行扭矩曲線對比圖,穩(wěn)態(tài)工況下二者基本一致。工況開始階段系統(tǒng)運(yùn)行在非巡航狀態(tài),巡航需求扭矩為0,此時(shí)系統(tǒng)響應(yīng)駕駛員踏板操作;進(jìn)入巡航工況后在駕駛員長按下巡航減速鍵后系統(tǒng)實(shí)際執(zhí)行扭矩短暫偏離目標(biāo)扭矩(約15000~17000秒),此時(shí)實(shí)際扭矩由于系統(tǒng)原因輕微受限,系統(tǒng)穩(wěn)定后扭矩執(zhí)行一致。
圖12是全工況下動力電池需求功率與電池實(shí)際輸出功率對比曲線和動力電池荷電狀態(tài)情況。由圖可知,系統(tǒng)實(shí)際使用功率在預(yù)期范圍內(nèi),電池實(shí)際功率與需求功率吻合,SOC穩(wěn)定在目標(biāo)范圍內(nèi)(0.35~0.75)。
以上測試結(jié)果表明混合動力汽車巡航狀態(tài)下車輛實(shí)際車速始終跟隨巡航設(shè)定車速,且車速誤差控制較好,穩(wěn)定控制在2km/h之內(nèi);巡航工況下系統(tǒng)需求扭矩與實(shí)際執(zhí)行扭矩基本一致、動力電池荷電狀態(tài)控制在目標(biāo)范圍內(nèi),混合動力巡航系統(tǒng)控制達(dá)到了設(shè)計(jì)要求。
6 結(jié)論
本文基于模型的設(shè)計(jì),開發(fā)了混合動力整車巡航工作模式及不同工況下巡航控制策略,完成了巡航系統(tǒng)MATLAB/Simulink建模、離線仿真;在Simulink模型轉(zhuǎn)換為Targetlink模型的基礎(chǔ)上,進(jìn)行了巡航控制策略自動代碼生成,把生成的C代碼與控制器硬件代碼集成、編譯和鏈接后形成可執(zhí)行文件下載到產(chǎn)品級整車控制單元,完成了混合動力車輛巡航控制策略試驗(yàn)驗(yàn)證,試驗(yàn)結(jié)果表明:
采用自動代碼生成技術(shù)生成的C代碼長度適中、高效;巡航駕駛時(shí)實(shí)際車速與巡航設(shè)定車速誤差在可控范圍內(nèi),車速跟隨度達(dá)到設(shè)計(jì)要求。
[1]魏學(xué)哲,戴海峰,孫澤昌. 汽車嵌入式系統(tǒng)開發(fā)方法、體系架構(gòu)和流程[J]. 同濟(jì)大學(xué)學(xué)報(bào)(自然科學(xué)版),2012,40(7):1064-1070.
[2]張奇. 基于V模式的dSPACE 電機(jī)控制器開發(fā)[J].實(shí)驗(yàn)室研究與探索,2014,33(11):141-145.
[3]王晨,趙治國,張彤等. 復(fù)合功率分流式e_CVT結(jié)構(gòu)優(yōu)化及驗(yàn)證[J].中國公路學(xué)報(bào),2015,28(3):117-126.
[4]公彥軍等. 拉維娜行星齒輪機(jī)構(gòu)的運(yùn)動分析和傳動效率計(jì)算[J]. 設(shè)計(jì)與研究,2010,9:9-11.
[5]王笑樂,干頻,陳凌珊等. 增程式電動汽車發(fā)動機(jī)多工作點(diǎn)控制策略[J]. 江南大學(xué)學(xué)報(bào)( 自然科學(xué)版),2015,14(1):56-63.
[6]李周清,李婷婷,紀(jì)小莊. 電動汽車用永磁同步電機(jī)的選型研究[J].微特電機(jī),2015,43(6):50-54.
[7]涂成姣. 基于Targetlink的自動代碼生成及其在電池管理系統(tǒng)開發(fā)中的應(yīng)用[J].研究與開發(fā),2014,04:040-044.
專家推薦
何華強(qiáng):
本論文整體來說體系結(jié)構(gòu)比較完整,從物理系統(tǒng)建模、控制系統(tǒng)開發(fā)、定點(diǎn)化及代碼生成、整車測試,基本按照V流程的過程進(jìn)行了介紹,實(shí)用性和科學(xué)性比較吻合工程實(shí)際需求。
本文較為詳細(xì)的介紹了基于行星輪系統(tǒng)的混合動力巡航控制算法,并取得了較好的控制
Cruise Control Strategy of HEV Based on Automatic Code Generation of Targetllink
SHAN Jin-rong1,2,ZHANG Xin-feng1,ZHOU Wen-tai2
(1. College of Automobile,Tongji University,Shanghai 201804; 2. Keliyuan Hybrid Technology (Shanghai)Co.,Ltd,Shanghai 201501,China)
For the sake of reducing development costs effectively by shortening lead time of HEV control system,cooperative control algorithms between HEV and cruise control were designed by use of model-based approach,models of cruise control strategy for HEV and auto-code generation were finished with MATLAB/Simulink and dSPACE/Targetlink,the efficient C code for HEV Cruse system were writed into ECUs. The test results showed that cruise speed was steadily controlled within certain range,meeting the design requirements; the results indicated that the technology of auto-code generation was effective in cutting down iteration and raising efficiency of system development.
HEV; control strategy; auto-code generation; cruise
2016-05-04
U469.72
A
1005-2550(2016)04-0065-06
10.3969/j.issn.1005-2550.2016.04.012
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
能源工程(2020年6期)2021-01-26 00:55:22
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
山東冶金(2019年3期)2019-07-10 00:54:04
消費(fèi)導(dǎo)刊(2018年10期)2018-08-20 02:57:02
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
通信電源技術(shù)(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03