救援機器人操作臂的正運動學(xué)分析與仿真
2016-08-18 06:00:07韓訓(xùn)梅
中國教育技術(shù)裝備 2016年12期
關(guān)鍵詞:分析
◆韓訓(xùn)梅
救援機器人操作臂的正運動學(xué)分析與仿真
◆韓訓(xùn)梅
救援機器人是當前機器人研究領(lǐng)域中的一個熱點,它一般采用輪式或履帶式車體加裝操作臂的結(jié)構(gòu)。機器人可以在遠端被遙控從而實現(xiàn)半自主或自主作業(yè),廣泛應(yīng)用于各種危險的救援場合。在自主研制的救援機器人基礎(chǔ)上,根據(jù)作業(yè)環(huán)境特點及作業(yè)任務(wù)要求,對安裝在該救援機器人移動平臺上的操作臂進行運動學(xué)的正解、運動學(xué)仿真及優(yōu)化研究。
救援機器人;操作臂;運動學(xué)分析
10.3969/j.issn.1671-489X.2016.12.036
1 引言
近年來多發(fā)的天災(zāi)(如地震、火災(zāi))、人禍(如恐怖活動、武裝沖突等)帶來的危害,威脅著人們的安全,引起了社會的廣泛關(guān)注。在一些危險性大的災(zāi)難中,施救人員無法深入進行偵探或施救,而救援機器人的加入可以有效地提高救援的效率,降低施救人員的危險系數(shù)[1]。
操作臂的結(jié)構(gòu)和人的手臂相似,是由一系列的剛性連桿通過關(guān)節(jié)連接而成的,是機器人關(guān)鍵部件之一。它可以借助計算機編程實現(xiàn)各桿件各關(guān)節(jié)運動的自動控制,最終驅(qū)動末端執(zhí)行機構(gòu)手爪部件完成規(guī)定的任務(wù)[2]。安裝有操作臂的救援機器人可以代替人從事很多高危險性的作業(yè)。
2 運動學(xué)模型坐標系的建立
本文的研究對象救援機器人的操作臂位于移動平臺上,如圖1所示。操作臂是關(guān)節(jié)型結(jié)構(gòu),腰關(guān)節(jié)和大臂相連,大臂可旋轉(zhuǎn)、可擺動;大臂和小臂相連,小臂可擺動、可伸縮;小臂和手腕相連,手腕可擺動、可旋轉(zhuǎn),如圖2所示,共計六自由度。
操作臂的正運動學(xué)分析是指根據(jù)各運動副的已知運動參數(shù),求末端執(zhí)行機構(gòu)相對于給定坐標系的位姿[3]。對該操作臂進行運動學(xué)分析之前,首先要分析兩相鄰桿件之間的關(guān)系,即建立連桿坐標系。1995年,Denavit和Hartenberg提出用矩陣法,即D-H法,來建立連桿坐標系。D-H坐標系的模式有兩種,即固連坐標系前置模式和后置模式。這兩種不同的模式雖然會使導(dǎo)出的變換矩陣有所不同,但對最終各連桿的位姿分析沒有影響。本文將采用固連坐標系前置模式來建立連桿坐標系,如圖3所示。

圖2 操作臂

圖1 移動平臺
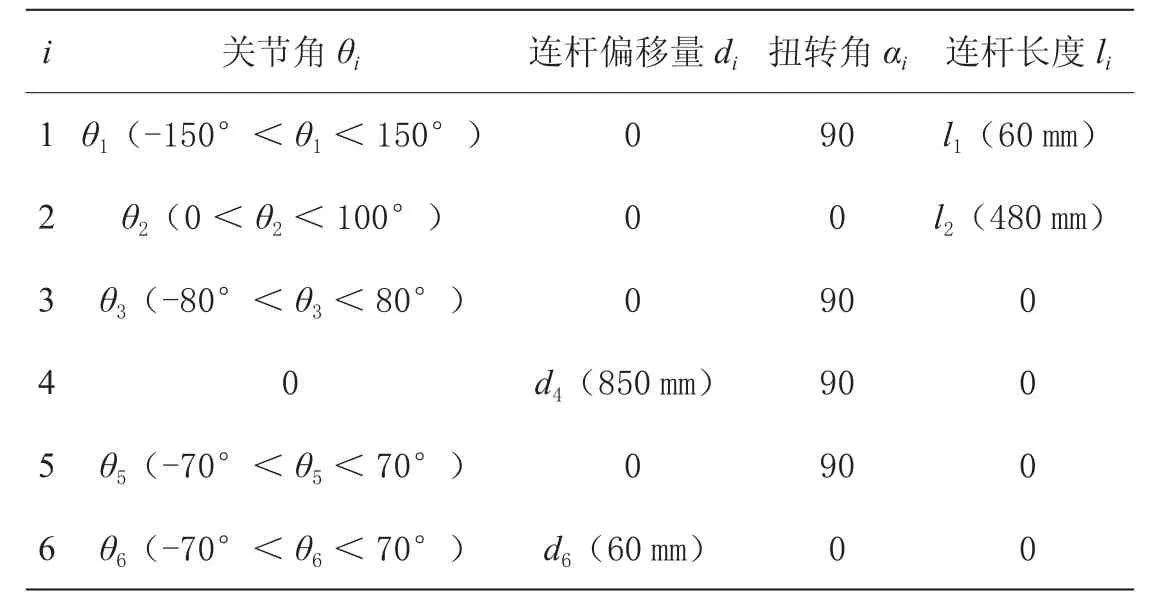
表1 操作臂D-H參數(shù)表
作者:韓訓(xùn)梅,三江學(xué)院機械工程學(xué)院專任教師、講師,主要從事數(shù)控技術(shù)和機電一體化專業(yè)課程的教學(xué)與研究工作(210012)。
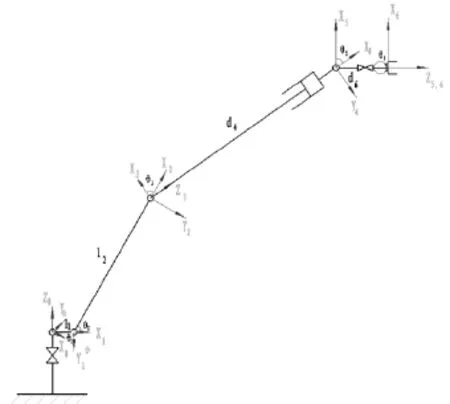
圖3 操作臂坐標系建立示意圖
3 運動學(xué)的正解
根據(jù)所建坐標系和操作臂各關(guān)節(jié)運動范圍,可得到操作臂D-H參數(shù)如表1所示。
由表1可以得到操作臂各個關(guān)節(jié)之間的連桿變換矩陣如下:

可得操作臂的坐標轉(zhuǎn)換矩陣:
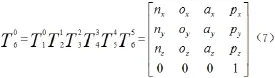
式中:
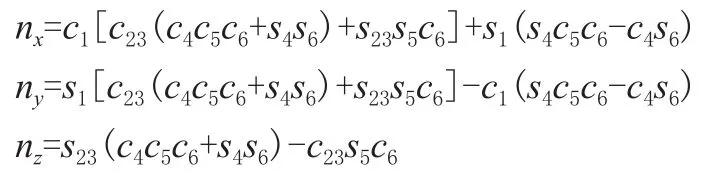
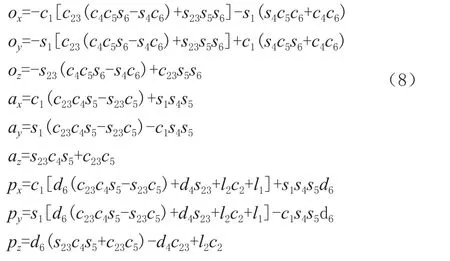
其中:

式7~式9即是操作臂的變換矩陣,描述了末端腕關(guān)節(jié)坐標系{6}相對于腰關(guān)節(jié)基準坐標系{0}的位姿,這是操作臂運動學(xué)的正解分析。
4 運動學(xué)仿真分析
根據(jù)上面得到的操作臂運動學(xué)正解的結(jié)果,下面借助ADAMS軟件對該操作臂進行運動學(xué)仿真。首先,將通過SolidWorks構(gòu)建的操作臂的模型導(dǎo)入到軟件ADAMS/View中;其次,對其各構(gòu)成部件的屬性和部件元素的屬性進行編輯;再次,根據(jù)實際運動情況添加約束和驅(qū)動,即生成完備模型[3],如圖4所示;最后進行運動學(xué)軟件的仿真,生成仿真曲線,如圖5~圖12所示。
通過分析各關(guān)節(jié)角加速度和角速度曲線,可知各關(guān)節(jié)均正常運行,操作臂運行軌跡光滑,速度和加速度平穩(wěn)。從圖中的加速度曲線可知,在啟動和停止階段,小臂伸縮、俯仰關(guān)節(jié),大臂俯仰關(guān)節(jié)和云臺的旋轉(zhuǎn)關(guān)節(jié)的加速度都有比較大的變化。開始時,加速度從零到最大值;結(jié)束時,加速度從最大值降到零。在中間運行階段,角加速基本保持平穩(wěn),大致呈線性變化。由于考慮了重力,各關(guān)節(jié)的角加速度是重力和驅(qū)動力矩共同作用的結(jié)果。
從各關(guān)節(jié)所受的力和力矩曲線可看出,各關(guān)節(jié)驅(qū)動力矩變化平穩(wěn),沒有沖擊現(xiàn)象。
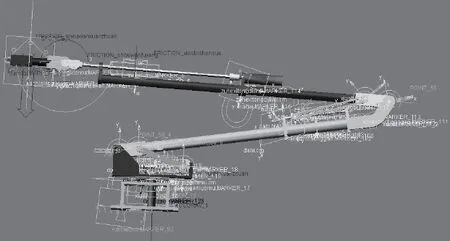
圖4 操作臂定義約束后模型
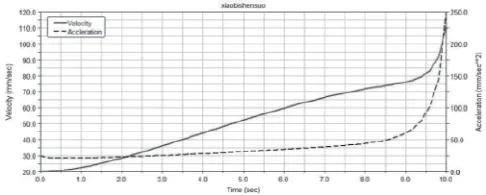
圖5 小臂伸縮關(guān)節(jié)速度、加速度圖
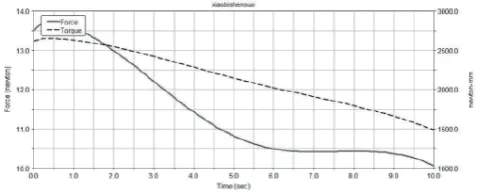
圖6 小臂伸縮關(guān)節(jié)受力、力矩圖
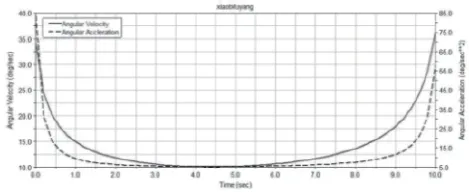
圖7 小臂俯仰關(guān)節(jié)速度、加速度圖
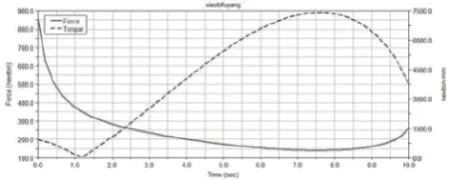
圖8 小臂俯仰關(guān)節(jié)受力、力矩圖
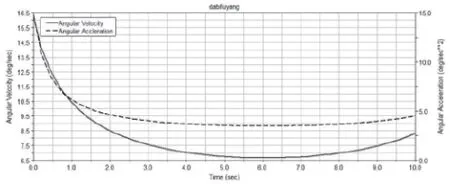
圖9 大臂俯仰關(guān)節(jié)速度、加速度圖
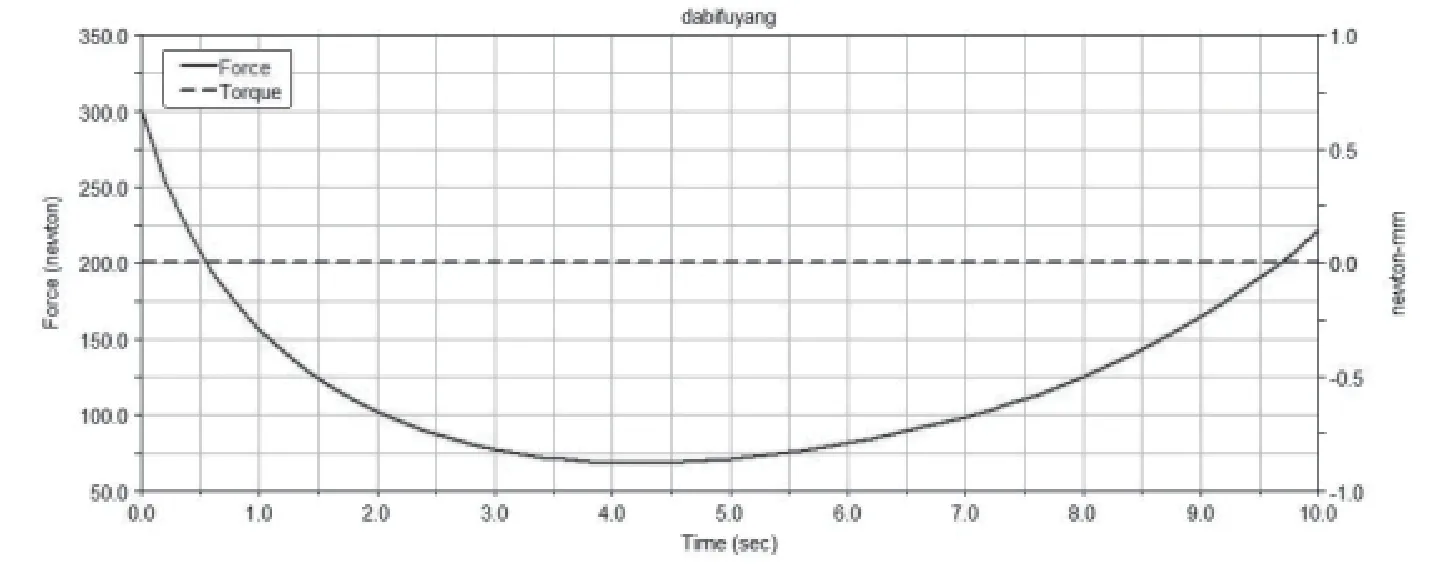
圖10 大臂俯仰關(guān)節(jié)受力、力矩圖
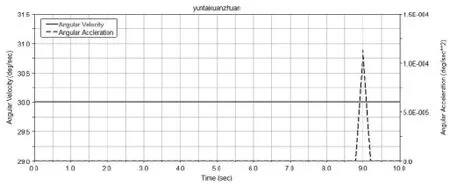
圖11 云臺旋轉(zhuǎn)關(guān)節(jié)速度、加速度圖
綜合以上兩點可知,操作臂各關(guān)節(jié)的運動是比較平穩(wěn)的,無劇烈振動,符合之前的理論分析。
5 結(jié)語
本文使用D-H建立了操作臂各關(guān)節(jié)坐標系,并求解出操作臂的位姿正解方程,后又借助ADAMS軟件對操作臂進行具體運動的仿真分析,最后結(jié)合作業(yè)過程中的一般抓取物體的實例,獲得操作臂各關(guān)節(jié)電機力矩的變化規(guī)律,以及角加速度、角速度的變化規(guī)律,為樣機設(shè)計中電機的優(yōu)化選擇提供了依據(jù),同時也為機器人教學(xué)創(chuàng)建了相應(yīng)的分析實例。■
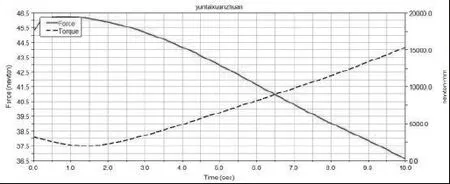
圖12 云臺旋轉(zhuǎn)關(guān)節(jié)受力、力矩圖
[1]劉金國,等.災(zāi)難救援機器人研究現(xiàn)狀、關(guān)鍵性能及展望[J].機械工程學(xué)報,2006,42(12):1-12.
[2]劉海江,姜冬冬,張春偉.采用ADAMS的五自由度拋光機械手仿真分析[J].現(xiàn)代制造工程,2010(12):50-53.
[3]曹俊琴.一種基于思維進化算法的神經(jīng)網(wǎng)絡(luò)求解機器人逆運動學(xué)問題[D].太原:太原理工大學(xué),2005:4.
[4]張艷麗.基于ADAMS的關(guān)節(jié)型機器人正運動學(xué)分析與仿真[J].沈陽航空工業(yè)學(xué)院學(xué)報,2009(4):31-33.
Forward Kinematic Analysis and Simulation of a Rescue Robot Manipulator//HAN Xunmei
Rescue robot is a hot topic in the fi eld of robotics research. It is commonly used wheeled or tracked vehicle body installation of the operating arm of the structure. The robot can be remote semiautonomous or autonomous operation, widely used in a variety of dangerous rescue situations. According to the requirements of the operating environment characteristics and job tasks, in combination with the self-developed rescue robot, kinematics, and trajectory planning and simulation of the operating arm mounted on a mobile platform is carried.
rescue robot; manipulator; kinematics
TP242.6
B
1671-489X(2016)12-0036-05
猜你喜歡
現(xiàn)代畜牧科技(2021年9期)2021-10-13 06:39:14
民用飛機設(shè)計與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22
當代經(jīng)濟研究(2016年5期)2016-12-01 03:12:05
現(xiàn)代農(nóng)業(yè)(2016年5期)2016-02-28 18:42:46
出版與印刷(2016年3期)2016-02-02 01:20:11
中國中醫(yī)藥現(xiàn)代遠程教育(2014年11期)2014-08-08 13:23:44
華北水利水電大學(xué)學(xué)報(社會科學(xué)版)(2014年3期)2014-04-16 04:38:31
終身教育研究(2014年5期)2014-02-28 01:23:06
