基于模糊PID主從式方法的多電機同步控制
2016-08-18 07:36:22周武能
網(wǎng)絡安全與數(shù)據(jù)管理 2016年15期
潘 亮,周武能,張 楊
(東華大學 信息科學與技術(shù)學院,上海 201620)
?
基于模糊PID主從式方法的多電機同步控制
潘亮,周武能,張楊
(東華大學 信息科學與技術(shù)學院,上海 201620)
通過對多電機同步控制結(jié)構(gòu)和控制策略的傳統(tǒng)PID控制算法與模糊PID控制算法的分析,提出了模糊PID主從式同步控制方法,并通過MATLAB/Simulink進行建模仿真。仿真結(jié)果表明,與傳統(tǒng)PID同步控制算法相比,采用模糊PID主從式同步控制方法具有更好的同步性能表現(xiàn),并能夠有效地改善系統(tǒng)的穩(wěn)定性和動態(tài)性能,而且具有良好的魯棒性。
多電機;同步控制;PID;模糊控制
0 引言
多電機系統(tǒng)廣泛應用于工業(yè)、農(nóng)業(yè)和交通運輸業(yè)中,在工業(yè)生產(chǎn)中的地位也越來越重要。為了獲得高質(zhì)量的產(chǎn)品,減少輪廓誤差,提高系統(tǒng)操作的安全性,通常,同步是多電機系統(tǒng)的最基本的要求[1-2]。在最近幾十年里,很多種同步控制策略被應用在多電機控制系統(tǒng)中。參考文獻[3]中運用混沌速度同步控制器,通過對兩臺電機的轉(zhuǎn)速偏差進行補償,有效地改善了系統(tǒng)同步性能。參考文獻[4]中針對一個雙線性電機伺服系統(tǒng)提出了交叉耦合的智能滑模控制;為了簡化控制結(jié)構(gòu),ZHAO D Z等人研究了一種混合滑模控制的膜毗鄰耦合的多電機同步控制[5],Xiao Yong等人針對多電機系統(tǒng)提出了一種通用的同步控制器,通過在最優(yōu)控制結(jié)構(gòu)中整合交叉耦合技術(shù)實現(xiàn)[6]。除此之外,很多其他的控制策略也被運用在多電機同步控制系統(tǒng)中,比如自適應控制、魯棒控制、神經(jīng)網(wǎng)絡控制、變增益控制等。通常耦合的多電機系統(tǒng)中很少考慮驅(qū)動裝置的動態(tài)模型,針對以上不足,本文提出了模糊PID主從式同步控制方法,該方法能夠有效改善系統(tǒng)的穩(wěn)定性和動態(tài)性能,并具有良好的魯棒性。在實際應用中,多電機的同步性能會因各驅(qū)動特性的不匹配、負載的擾動等因素的影響而惡化,因此同步控制方法的好壞直接影響著系統(tǒng)的可靠性與穩(wěn)定性。由于多電機系統(tǒng)應用越來越廣泛,方式靈活,所以多電機同步控制系統(tǒng)的研究已經(jīng)成為眾多學者研究的熱點。
1 多電機同步控制結(jié)構(gòu)
鑒于多電機的重要性,近幾十年以來,多電機系統(tǒng)吸引了大量學者廣泛的研究興趣,多種多電機同步控制策略被相繼提出,比如自適應控制、魯棒控制、神經(jīng)網(wǎng)絡控制、變增益控制、無模型控制等都取得了比較理想的控制效果。這些同步控制策略主要基于兩種多電機同步控制結(jié)構(gòu)——機械同步結(jié)構(gòu)和電子同步結(jié)構(gòu),前者主要通過物理部件進行連接,像皮帶、鏈條、齒輪等,成本比較高,其弊端是電機在工作過程中,一旦工作環(huán)境發(fā)生變化,就會導致機械總軸震動,而且實施起來也有一定的困難,因此,這種同步方式現(xiàn)在用得越來越少。
鑒于機械結(jié)構(gòu)的一些弊端,學者們又提出了電子同步控制結(jié)構(gòu)[7],這種控制結(jié)構(gòu)成本比較低,實施起來也相對容易很多,因此在多電機系統(tǒng)中應用越來越廣泛。電子同步控制結(jié)構(gòu)又可細分為兩種,第一種是主從控制方式,它的控制思想是:讓從電機跟蹤主電機運行,因此系統(tǒng)中只給定主電機輸入信號,其輸出信號送入從電機的輸入中,當沒有擾動因素影響時,該控制結(jié)構(gòu)可以達到比較理想的控制效果。它的弊端是,主從電機之間沒有反饋,因此整個控制系統(tǒng)相當于開環(huán)控制結(jié)構(gòu),主從電機中任何一個在工作過程中受到擾動因素的影響,都會出現(xiàn)較大的同步誤差,甚至導致系統(tǒng)不穩(wěn)定。
在實際生產(chǎn)過程中,當主電機在運行中受到擾動或發(fā)生故障時,都會影響到后面的從電機,針對這種情況人們提出并行同步控制思想。相對于主從控制方式,并行控制結(jié)構(gòu)的優(yōu)點在于,系統(tǒng)中所有的電機采用相同的輸入?yún)⒖妓俣龋鉀Q了主從控制存在的問題。
2 基于模糊PID的同步控制
傳統(tǒng)PID由于結(jié)構(gòu)和算法相對簡單,且易于實現(xiàn),在工業(yè)生產(chǎn)中有著廣泛的應用,它的不足之處是一般需要知道被控對象的精確數(shù)學模型,而且算法的參數(shù)整定也比較困難,再加上不具備自適應能力,一旦工作環(huán)境發(fā)生變化,就需要對參數(shù)重新進行整定[8]。隨著制造業(yè)的不斷發(fā)展,人們對產(chǎn)品的各方面性能要求越來越高,控制系統(tǒng)也必將越來越復雜,現(xiàn)代的控制系統(tǒng)多存在非線性、強耦合、時變性等特性,傳統(tǒng)的控制方法已難以滿足控制的要求。為了解決這一難題,學者們提出了多種智能PID控制方法[9],比如專家PID、遺傳算法PID、神經(jīng)網(wǎng)絡PID等。然而由于控制器的計算速度有限,這些算法很難用到實時的控制對象中。本文采用兩輸入(誤差和誤差的變化率)的模糊控制器,它能夠根據(jù)控制系統(tǒng)的誤差及誤差的變化率自動調(diào)節(jié)PID的3個參數(shù),因為它具有自動調(diào)節(jié)其參數(shù)的能力,所以相比其他控制器而言,具有更好的控制性能表現(xiàn)。
3 模糊PID主從式同步控制策略
傳統(tǒng)的主從式電機同步控制方法由于兩個電機之間沒有轉(zhuǎn)速的反饋,所以整個控制系統(tǒng)相當于開環(huán)結(jié)構(gòu),當主電機在運行過程中受到擾動時,其速度就會發(fā)生較大的變化,由于傳統(tǒng)的PID控制方法,控制過程一旦確定就無法改變,因此,兩個電機之間就會出現(xiàn)較大的同步誤差,甚至導致控制系統(tǒng)的不穩(wěn)定。本文在此基礎上,提出了模糊PID主從式同步控制方法,從電機采用模糊PID控制器,以兩個電機之間的轉(zhuǎn)速差及差值變化率作為模糊控制器的兩個輸入,輸出PID 3個參數(shù)的增量。由于模糊PID具有自適應性[10],因此它能在線調(diào)整PID控制器的3個參數(shù),當主電機受到擾動或從電機自身受到擾動時,從電機仍然能夠較好地跟隨主電機的速度,整個控制系統(tǒng)的同步性能大大提高。模糊PID主從式同步控制結(jié)構(gòu)如圖1所示。
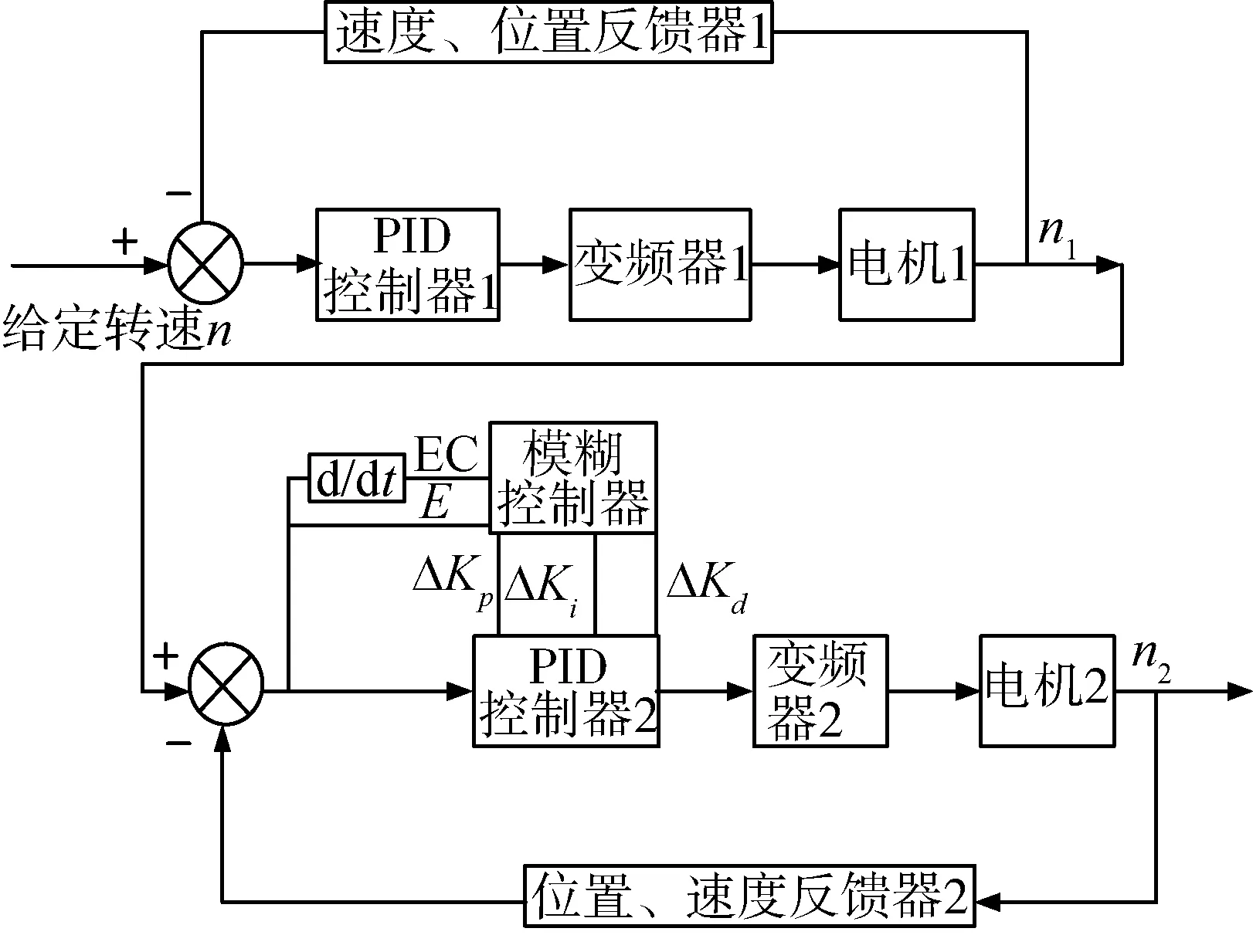
圖1 模糊PID主從式同步控制結(jié)構(gòu)圖
首先確定PID控制器的3個參數(shù)與偏差E以及偏差變化EC之間的模糊關(guān)系,這個控制規(guī)則很重要,一般有如下經(jīng)驗[11]:(1)當|E|較大時,為使系統(tǒng)具有較好的跟蹤性能,應取較大的Kp與較小的Ki,同時為避免系統(tǒng)響應出現(xiàn)較大的超調(diào),應對積分作用加以限制,通常取Ki=0。(2)當|E|和|EC|處于中等大小時,為了使系統(tǒng)響應具有較小的超調(diào),Kp應取得小些。在這種情況下,Kd的取值對系統(tǒng)響應的影響較大,Ki的取值要適當。(3)當|E|較小時,為使系統(tǒng)具有較好的穩(wěn)定性能,Kp與Ki均應取得大些,同時為避免系統(tǒng)在設定值附近出現(xiàn)振蕩,KD的取值相當重要,一般在|EC|較小時,Kd的取值應該較大些;|EC|較大時,Kd的取值應該較小些。然后在運行時實時檢測E及EC的值,根據(jù)先前確定的模糊關(guān)系,利用模糊推理的方法,在線修改PID控制器的3個參數(shù),使PID參數(shù)可自整定,以滿足不同E和EC對控制參數(shù)的要求,從而使控制系統(tǒng)有良好的動態(tài)、穩(wěn)態(tài)性能。
模糊控制器的核心部分是模糊規(guī)則,它是對工程人員的實際操作經(jīng)驗和技術(shù)知識的總結(jié),因此,合適的模糊規(guī)則表的建立尤為重要。本文在建立模糊規(guī)則時,偏差、偏差的變化以及控制量的論域均為{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6},模糊語言集可表示為{NB:負大,NM:負中,NS:負小,Z:零, PS:正小, PM:正中,PB:正大}。E和EC隸屬函數(shù)如圖2所示。
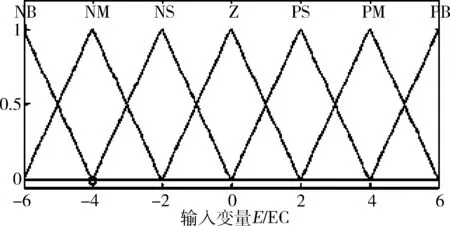
圖2 隸屬函數(shù)
根據(jù)控制規(guī)則、相關(guān)技術(shù)知識以及不斷的試驗結(jié)果,得到模糊控制規(guī)則表,如表1所示。
4 系統(tǒng)實驗仿真
本文搭建了基于傳統(tǒng)PID控制的主從式多電機同步控制方法和基于模糊PID的主從式多電機同步控制方法,并利用MATLAB/Simulink進行建模仿真,以表2所示的兩臺電機為例。選取等腰三角形作為隸屬度函數(shù)分布,可得各模糊子集的隸屬度賦值,再確定論域和語言值,然后根據(jù)各模糊子集隸屬度表和參數(shù)模糊控制模型,運用模糊推理設計PID 參數(shù)的模糊矩陣,仿真結(jié)果如圖3、圖4所示。
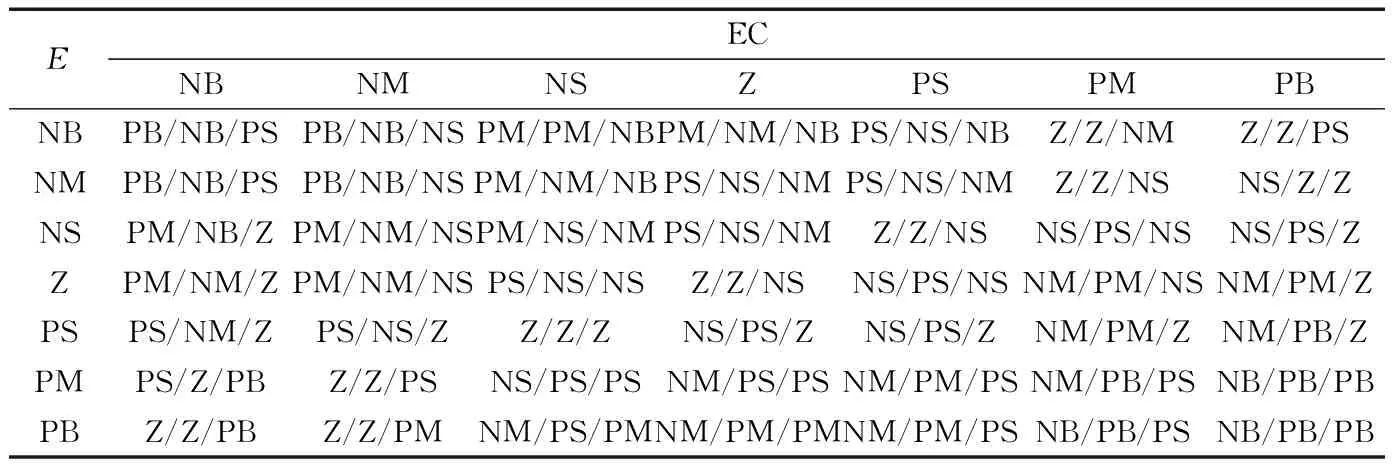
表1 ΔKp、ΔKi、ΔKd的控制規(guī)則
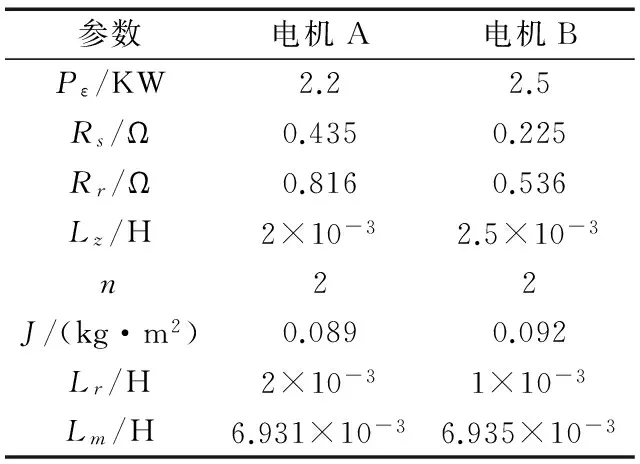
表2 兩臺三相交流異步電機參數(shù)
圖3、圖4分別為在傳統(tǒng)PID和模糊PID控制下,雙電機位置控制系統(tǒng)在斜坡信號作用下的A、B電機的位置跟蹤誤差曲線仿真圖。
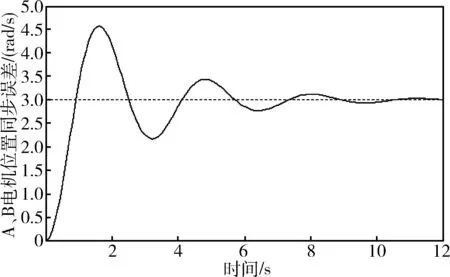
圖3 PID 控制器雙電機同步系統(tǒng)的位置跟蹤仿真結(jié)果
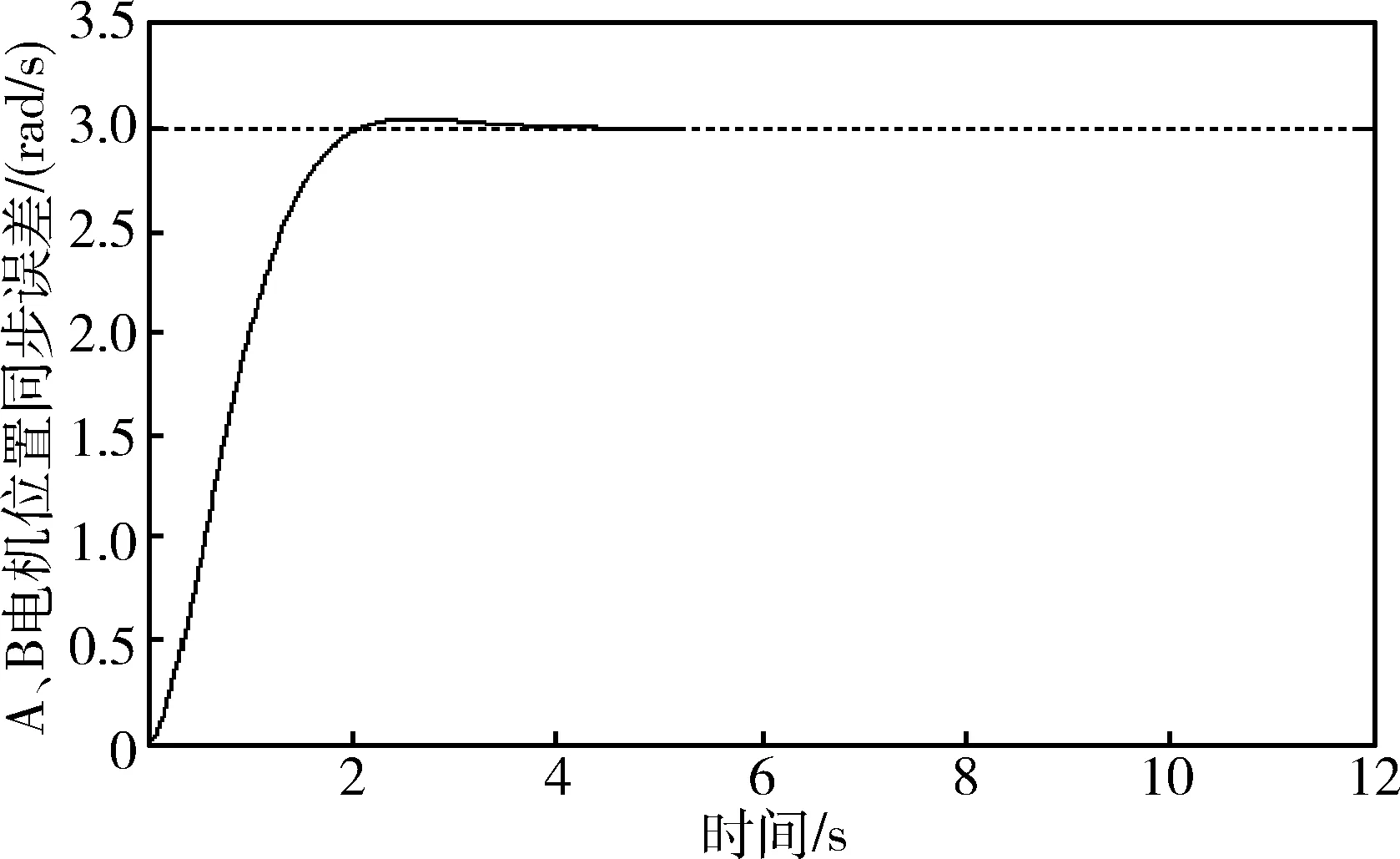
圖4 模糊PID 控制器雙電機同步系統(tǒng)的位置跟蹤仿真結(jié)果
比較圖3和圖4可知,在模糊PID控制下的控制系統(tǒng)有較好的控制性能,與傳統(tǒng)PID控制系統(tǒng)相比,其穩(wěn)態(tài)誤差更小,同時它的調(diào)整時間也遠小于傳統(tǒng)的PID控制。可見,在多電機同步控制系統(tǒng)中,采用基于模糊PID主從式同步控制策略,可以有效地改善系統(tǒng)的性能,使系統(tǒng)具有更好的穩(wěn)定性和較小的調(diào)節(jié)時間。
5 結(jié)束語
本文通過對幾種常見的多電機同步控制策略進行闡述及特點分析,在傳統(tǒng)主從式多電機同步控制的基礎上,提出了模糊PID主從式同步控制方法用于兩臺電機的同步控制,并以兩臺三相異步電機為例進行建模仿真。仿真結(jié)果表明,采用基于模糊PID主從式的多電機同步控制方法具有更小的同步誤差和更好的穩(wěn)定性,應用范圍更加廣泛。
[1] 吳其華,徐邦荃.多電機同步傳動控制系統(tǒng)分析 [J].兵工自動化,2003,22(1):20-24.
[2] 姜曉平,朱奕,傘冶.大功率隨動試驗臺多永磁同步電機同步控制[J]. 電機與控制學報,2014,18(4):89-95.
[3] ZHANG Z,CHAU K T,WANG Z. Chaotic speed synchronization control of multiple induction motors using stator flux regulation[J].IEEE Transaction on Magnetics, 2012,48 (11):4487-4490.
[4] LIN F J,CHOU P H,CHEN C S,et al.DSP-based cross-coupled synchronous control for dual linear motors via intelligent complementary sliding mode control[J]. IEEE Transaction on Industrial Electronics, 2012,59(2):1061-1073.
[5] ZHAO D Z, LI C W,REN J.Speed synchronization of multiple induction motors with adjacent cross-coupling control[J]. IET Control Theory and Application, 2010,4(1):119-128.
[6] Xiao Yong,Zhu Kuanyi,LIAW H C. Generalized synchronization control of multi-axis motion system[J].Control Engineering Practice, 2005,13(7):809-819.
[7] 王國亮.基于模糊PID補償器的多電機同步控制策略研究[D].沈陽:東北大學,2006.
[8] 劉金琨. 先進PID控制及其MATLAB仿真[M].北京:電子工業(yè)出版社,2008.
[9] 常滿波,胡鵬飛.基于MATLAB的模糊PID控制器的設計與仿真[J].機車電傳動,2002(5):34-36.
[10] 張建民,王濤,王忠禮.智能控制原理及應用[M].北京:冶金工業(yè)出版社,2004.
[11] 諸靜.模糊控制理論與系統(tǒng)原理[M].北京:機械工業(yè)出版社,2005.
The multi-motor synchronous control based on fuzzy PID master-slave method
Pan Liang,Zhou Wuneng, Zhang Yang
(College of Information Science & Technology, Donghua University, Shanghai 201620, China)
In this paper, through analyzing the traditional PID control algorithm and fuzzy PID control algorithm of the multi-motor synchronous control structure and control strategy, a method of fuzzy PID master-slave synchronous control is proposed. Furthermore, modeling and simulation is established by MATLAB/Simulink. Results show that compared with the traditional PID synchronous control algorithm, fuzzy PID master-slave synchronous control method is of better synchronization performance, and can effectively improve the stability and dynamic performance of the system, and has good robustness.
multi-motor; synchronous control; PID; fuzzy control
TP23
A
10.19358/j.issn.1674- 7720.2016.15.001
2016-04-03)
潘亮(1990-),男,碩士研究生,主要研究方向:智能控制、基于模糊PID的多電機同步控制。
周武能(1959-),男,博士,教授,博士生導師,主要研究方向:神經(jīng)網(wǎng)絡穩(wěn)定性與同步、復雜網(wǎng)絡穩(wěn)定性與同步、傳感器網(wǎng)絡協(xié)同與控制、魯棒控制、工業(yè)過程控制。
張楊(1992-),男,碩士研究生,主要研究方向:計算機網(wǎng)絡融合與系統(tǒng)集成、半主動懸掛控制系統(tǒng)。
引用格式:潘亮,周武能,張楊. 基于模糊PID主從式方法的多電機同步控制[J].微型機與應用,2016,35(15):5-7.
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
能源工程(2020年6期)2021-01-26 00:55:22
北京測繪(2020年12期)2020-12-29 01:33:58
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
通信電源技術(shù)(2016年1期)2016-04-16 04:57:26
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
