四輪獨立驅動電動車控制系統設計與研究
2016-08-28 02:08:06趙志剛駱志偉胡小龍楊松樸
微特電機 2016年11期
趙志剛,駱志偉,胡小龍,何 剛,楊松樸
(北京航天發射技術研究所,北京 100076)
四輪獨立驅動電動車控制系統設計與研究
趙志剛,駱志偉,胡小龍,何 剛,楊松樸
(北京航天發射技術研究所,北京 100076)
四輪獨立驅動電動汽車由于采用4個輪轂電機作為驅動電機,車輪的轉速和轉矩可以通過電機反饋得出,能夠實現單個車輪的獨立控制,在車輛控制策略制定、主動控制安全和制動能量回饋等方面具有明顯優勢。通過驅動力矩和和制動力矩的合理計算和分配控制以達到提高整車經濟性能的目的;通過輪速補償估算策略,使得四輪獨立驅動電動車的滑轉率計算更加準確,對于提高車輛行駛安全性具有十分重要的價值。
四驅電動車;轉速估算;滑轉率控制
0 引 言
四驅電動車采用輪轂電機的驅動方式,具有很多優點,比如每個車輪可以進行單獨驅動控制、車輪的轉速和轉矩可以測得、比傳統汽車機構簡單等顯著特點,從而能夠更好地運用車輛動力學原理,制定車輛控制策略,實現車輛的主動安全控制和能量回收利用,獨立驅動控制逐漸成為電動汽車發展的熱點。
本文簡要介紹了四驅電動車控制系統的組成,通過驅動力矩和和制動力矩的合理計算和分配控制以達到提高整車經濟性能的目的;通過輪速補償估算策略,使得四輪獨立驅動電動車的滑轉率計算更加準確,對于提高車輛行駛安全性具有十分重要的價值。
1 四驅電動車控制系統
四輪獨立驅動電動車采用4個輪轂電機作為驅動電機,車輪可以進行單獨控制,車輪的轉速和轉矩可以通過電機反饋得出,在車輛控制策略制定、主動控制安全和制動能量回饋等方面具有明顯優勢。
1.1硬件構成
四輪電驅車驅動系統由驅動控制系統、能量管理系統和監視系統組成。
驅動控制系統負責由驅動控制器根據采集的模擬信號判斷駕駛員意圖及車輛行駛狀態,對各驅動電機進行轉矩控制,給各電機控制器下發控制信號,完成電機驅動行駛控制。組成部分包括啟動開關、油門踏板、制動踏板、方向盤、集中控制器、電機控制器、驅動電機等。
能量管理系統負責實現多能量源管理、回饋制動、智能配電、蓄電池健康管理技術等功能。組成部分包括蓄電池組、充電機、智能配電器、集中控制器、制動控制單元等。
健康管理系統負責收集整車工作狀態及故障信息。實現整車健康管理、安全監視及數字儀表顯控。組成部分包括數字儀表、集中控制器、數字儀表等。
根據油門狀態對應輸出功率,通過比例換算得到給定的目標功率。根據電機當前轉速及轉矩給定確定電機是否達到了給定功率。在沒有達到給定功率時,驅動控制器按電機額定轉矩給各電機控制器下發轉矩指令。當達到給定功率時,以恒功率(給定功率)為限定條件,根據當前電機轉速動態計算轉矩給定值,轉矩給定值隨電機轉速增大而反比減小。各電機采用以功率為控制給定的等轉矩驅動策略,考慮整車動力性需求后期可根據軸荷不同進行轉矩補償。
整車功率流、信號流結構圖如圖1、圖2所示。
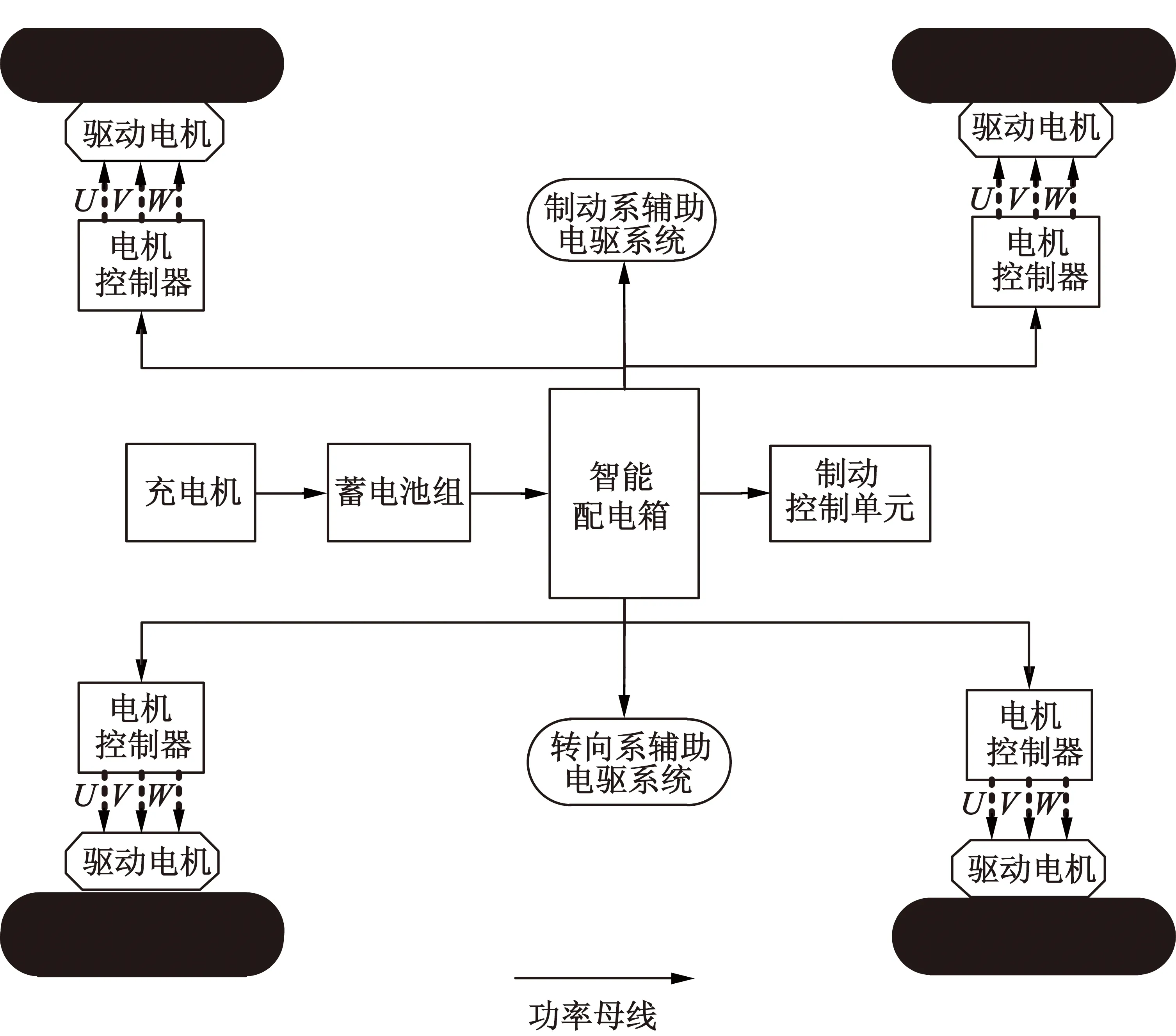
圖1 整車功率流結構圖
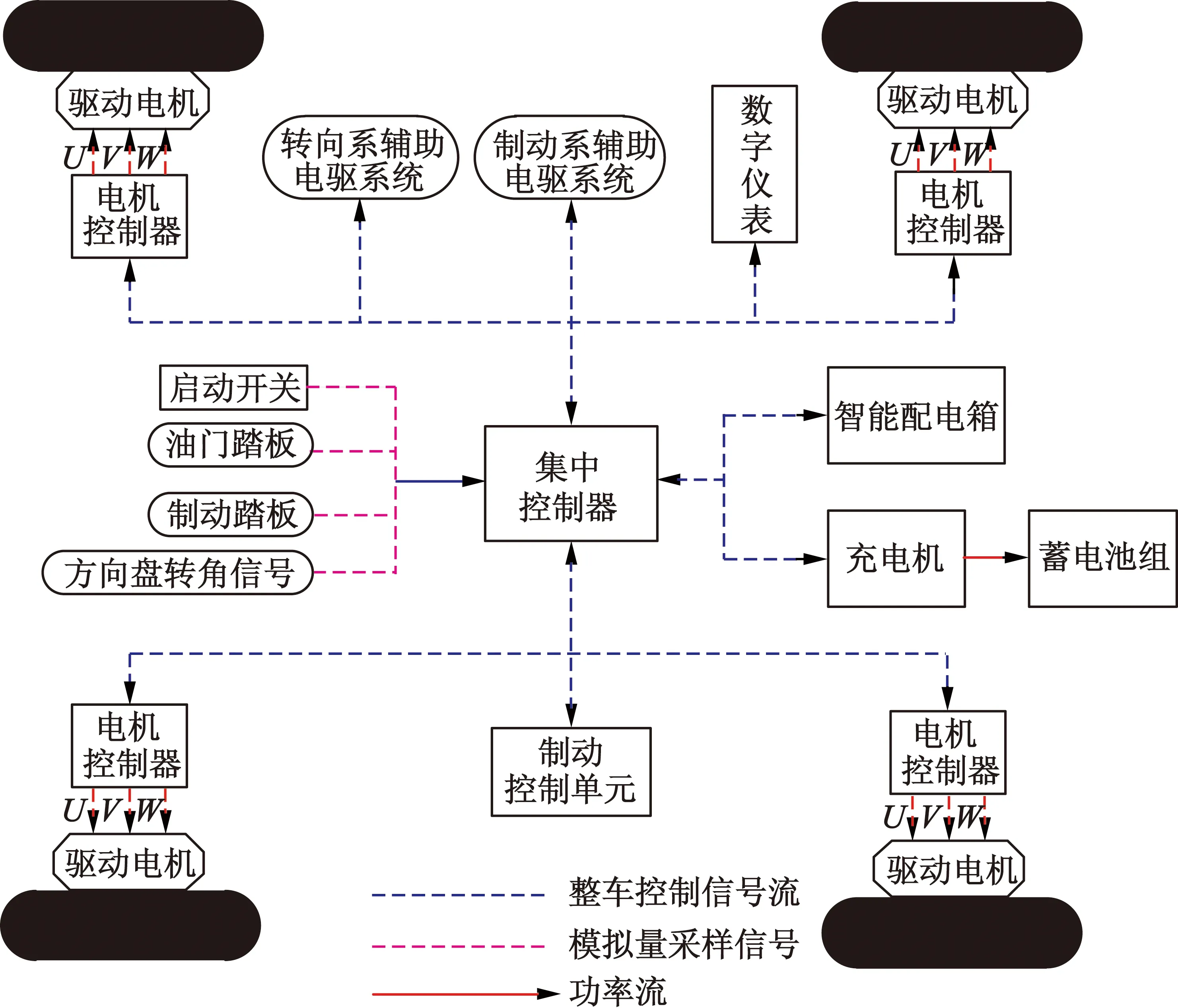
圖2 整車信號流結構圖
1.2軟件方案
通過基于全輪獨立驅動電動車極值輪速滑轉率估算方法簡化了全輪獨立驅動滑轉率的基礎輪速難以選擇的問題,通過基于胎壓監測的輪速補償技術解決了輪胎外徑差異帶來的計算量擾動問題,解決了全輪獨立驅動電動車滑轉率難以計算問題的方法。
若滑轉率>0.2,說明驅動力過大,需要降低該輪的驅動力;若滑轉率<-0.2,說明該輪被拖滑,需要增加該輪的驅動力。滑轉率計算原理如圖3所示。在車輛處于驅動狀態時,比較四輪的轉速并求出最小值,作為計算車速的基值;在車輛處于制動狀態是,比較四輪的轉速并求出最大值,作為計算車速的基值,從而有效地解決了滑轉率計算時車速難以選擇的問題。輪胎的胎壓是輪速一個十分重要的參數,由于胎壓的不同也會引起四輪轉速存在差異,通過檢測輪胎壓力的方法對輪速進行修正補償,對于更為準確估計輪胎轉速具有重要作用,補償原理如圖4所示。
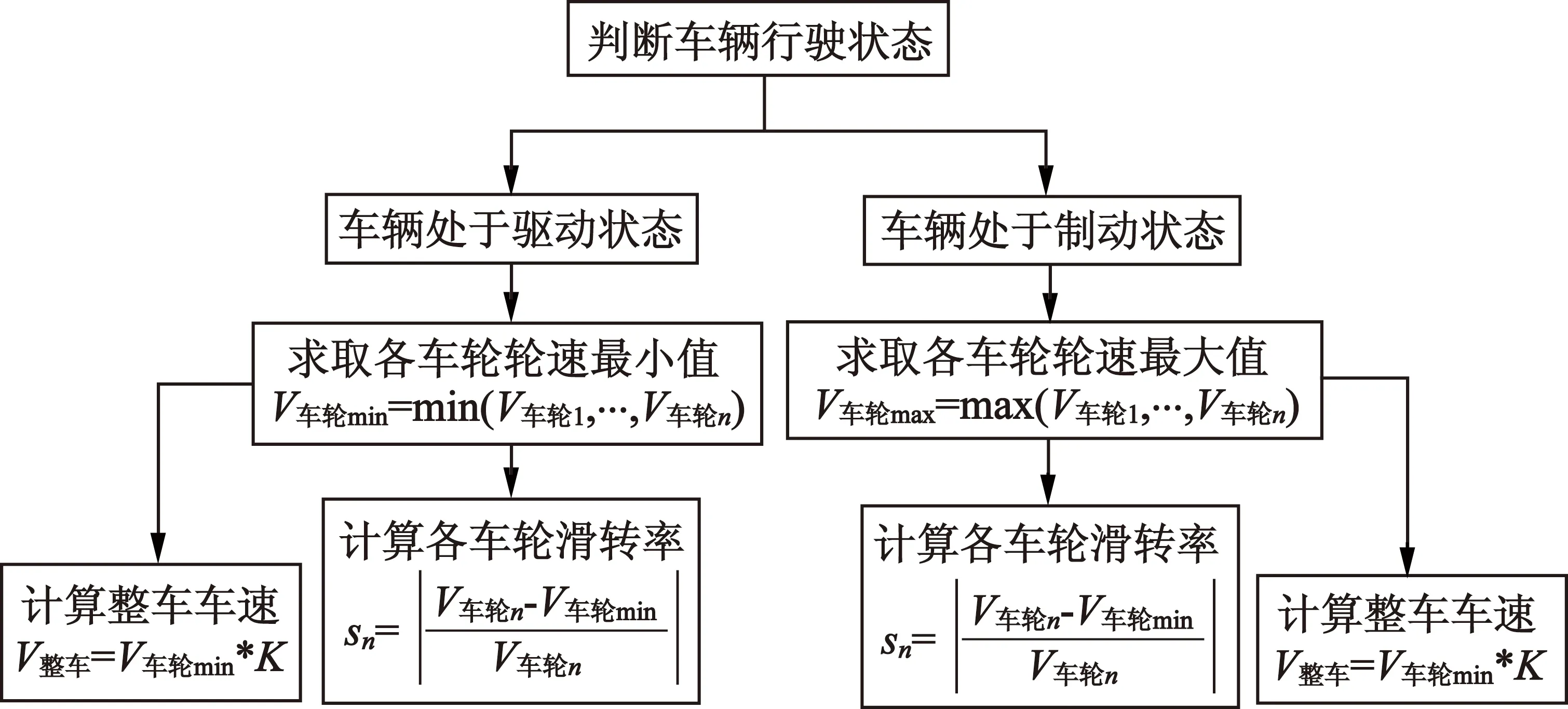
圖3 車速及滑轉率計算框圖

圖4 基于胎壓的輪速修正計算框圖
2 實驗結果
四驅電動車的實物如圖5所示。為了驗證路面行駛各輪力矩分配策略的有效性,進行了路面左轉彎、右轉彎試驗,實際的力矩分配效果如圖6、圖7所示。

圖5 四驅電動車實物圖

圖6 左轉彎(轉向角15°)時各輪轂電機轉矩分配
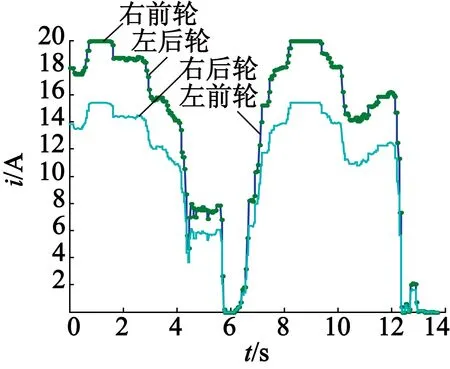
圖7 右轉彎(轉向角15°)時各輪轂電機轉矩分配
通過上述試驗數據可以看出,在不同的轉彎工況下,電子差速控制策略在試驗臺架上得到了驗證,各輪轂電機轉矩以轉向角為基準,按對應比例關系分配到內側和外側輪轂電機,試驗平臺轉向穩定,試驗平臺行駛平順。
當車輛行駛到附著系數不良的路面(如積水地面、冰雪地面等),或當駕駛人進行復雜操作(如高速轉向等)或因其他某種原因使四輪力矩分配不當時,可能產生車輪滑轉的危險現象,因此要對車輛進行滑轉率控制。滑轉率控制的目標是將各輪滑轉率控制在20%以內(從車輛動力學的角度考慮,當各輪滑轉率達到20%時,是輪胎相對于地面附著力開始下降的臨界點)。正常驅動行駛時,當滑轉率超過0.2,說明驅動力過大,則降低該輪的驅動力;制動運行時,當滑轉率超過0.2,說明該輪被拖滑,則增加該輪的驅動力。通過試驗驗證了各車輪發生滑轉時的控制效果,圖8、圖9、圖10分別給出了各輪空轉時滑轉率控制的效果。
從上述試驗數據中可以看出,當各車輪出現滑轉時,滑轉率控制策略生效,通過控制各輪轂電機轉矩,各車輪轉速得到有效控制,各輪滑轉率被控制在20%以內。
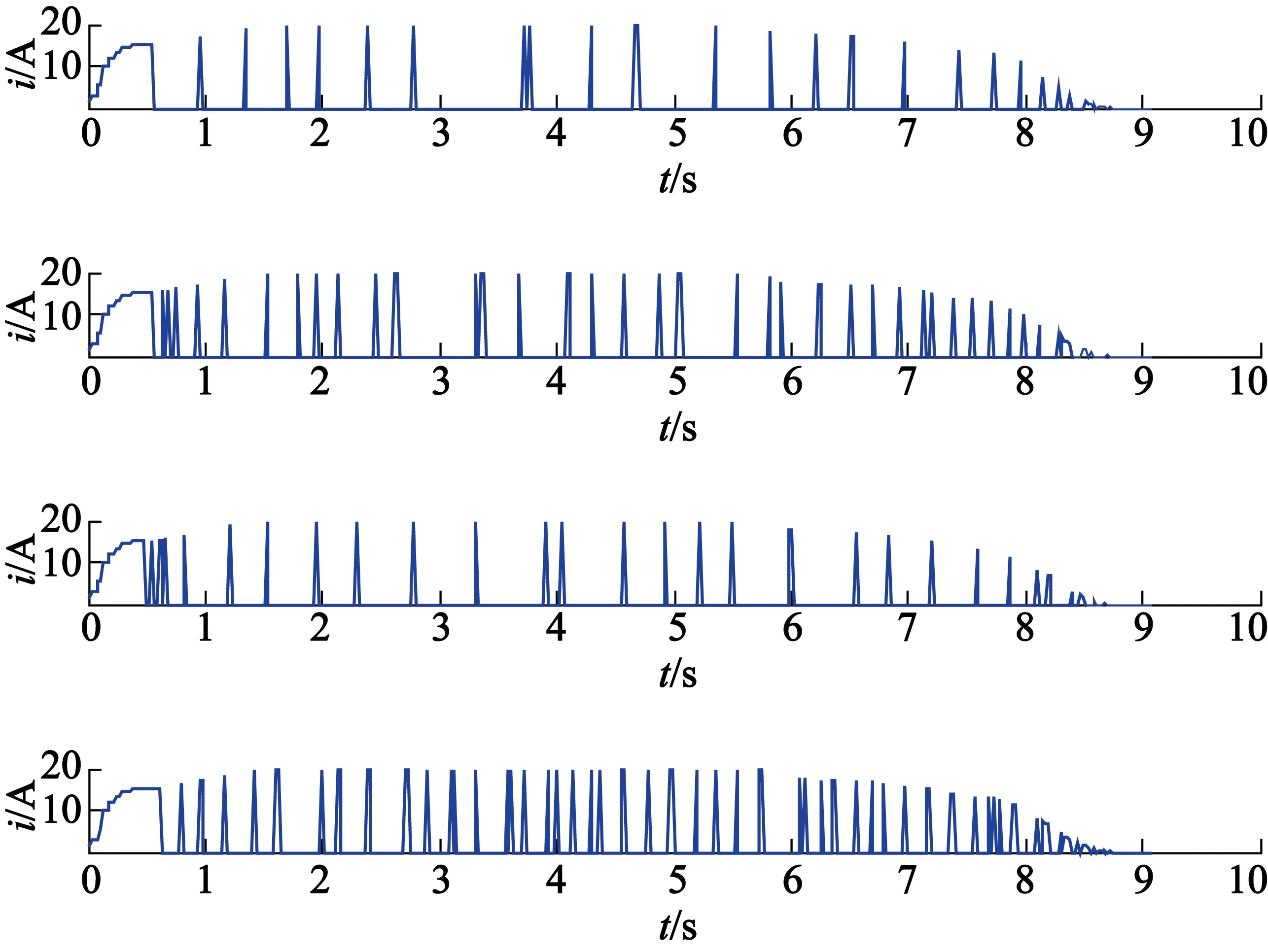
圖8 各輪滑轉時的轉矩控制效果圖
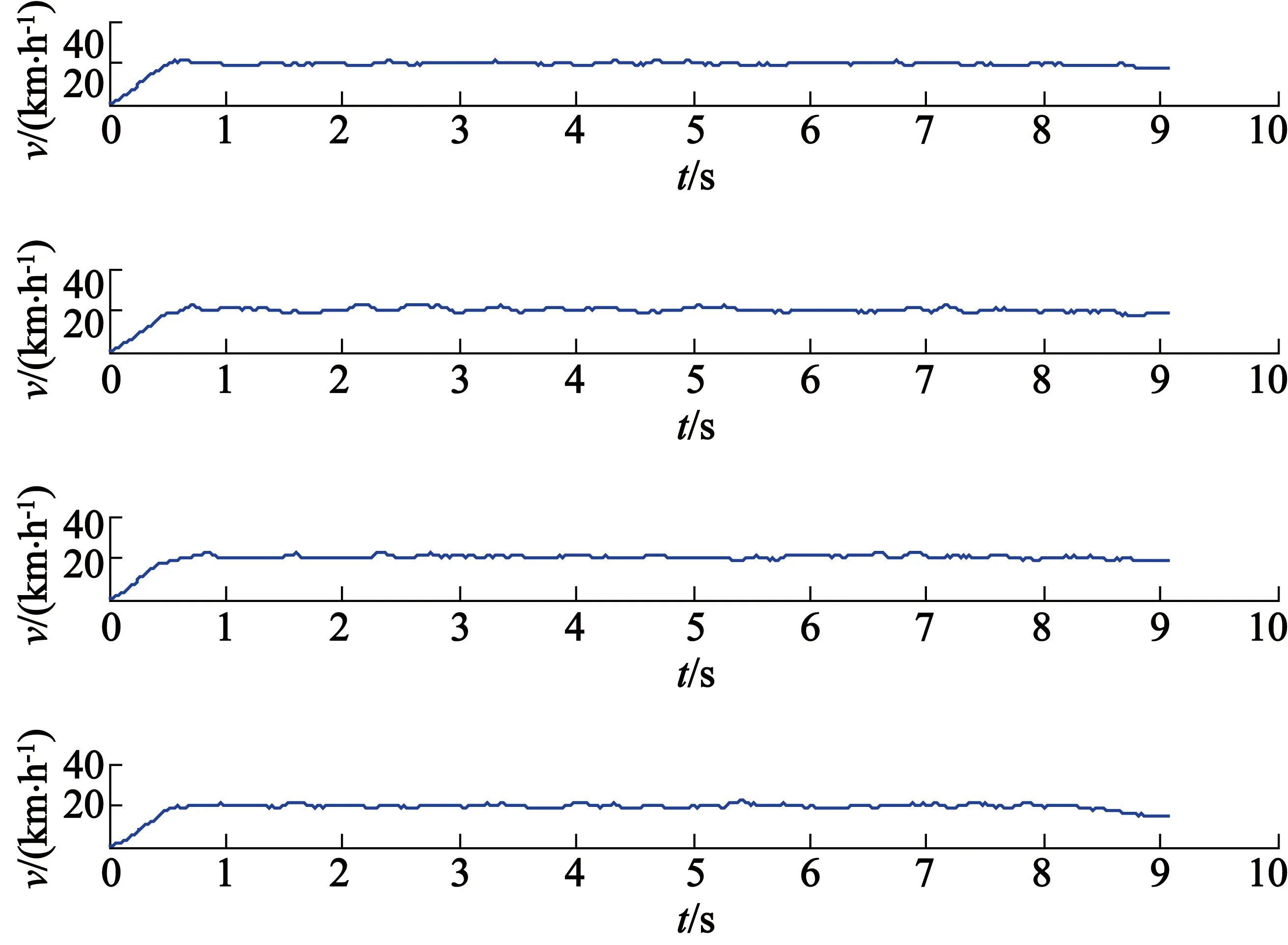
圖9 各輪滑轉時的輪速控制效果圖
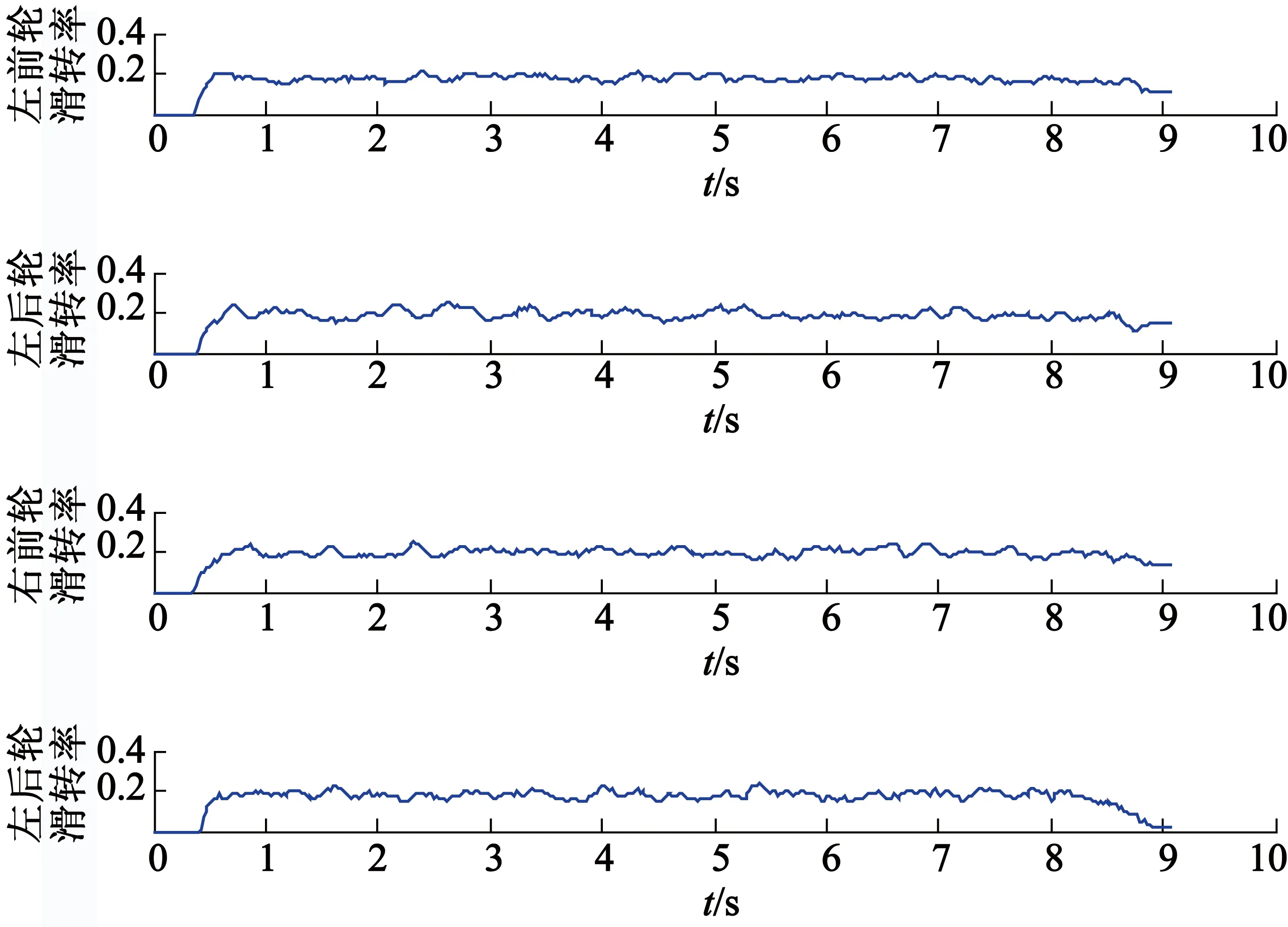
圖10 各輪滑轉時的滑轉率控制效果圖
3 結 語
本文研究了四輪驅動電動車轉矩分配、車輛轉速合理計算達到改善系統最佳運行經濟性的問題。給出了車輛速度計算的方法以及優化措施,通過路面試驗測試證明了該方法的有效性,對于車輛穩定性設計具有一定參考價值。
[1] 趙志剛,林輝,張慶超,等.電動舵機伺服控制器的設計與研究[J].微特電機,2013,41(9):44-46.
[2] 王恩德,黃聲華.表貼式永磁同步電機伺服系統電流環設計[J].中國電機工程學報,2012,32(33):82-88.
[3] 李剛.線控四輪獨立驅動輪轂電機電動汽車穩定性與節能控制研究[D].長春:吉林大學,2013.
[4] 廖凌宵.四輪獨立驅動電動汽車控制策略的研究[D].武漢:武漢理工大學,2010:12.
[5] 周勇.四電動輪獨立驅動電動車ABS/ASR控制策略研究[D].西安:西北工業大學,2006:14.
[6] GENG C,MOSTEFAI L,MOULOUD D,et al.Direct yaw-moment control of an in-wheel-motored electric vehicle based on body slip angle fuzzy observer[J].IEEE Transactions on Industry Applications,2009,56(5):1411-1419.
DesignandResearchoftheFour-WheelDriveElectricVehicle
ZHAOZhi-gang,LUOZhi-wei,HUXiao-long,HEGang,YANGSong-pu
(Beijing Institute of Space Launch Technology,Beijing 100076,China)
Wheel independent drive electric cars thanks to four-wheel motor as the drive motor, wheel speed and torque can be obtained by the motor feedback, enables independent control of individual wheels, the vehicle control strategy development, security and active control of braking energy feedback so has obvious advantages. Reasonable and calculating the drive torque and braking torque distribution control and the vehicle to achieve improved economic performance of the object; wheel speed estimated by the compensation policy, so that four-wheel independent drive electric cars slip rate calculation more accurately, to improve vehicle security has a very important value.
four-wheel drive electric vehicle; rotational speed estimation; slip rate control
2016-05-30
TM35
:A
:1004-7018(2016)11-0051-03
趙志剛(1989-),男,碩士,研究方向為電力電子與電力傳動。