基于參數辨識的電動負載模擬器復合控制
2016-08-28 02:08:11王修巖張革文李宗帥
微特電機 2016年11期
關鍵詞:系統
王修巖,張革文,李宗帥
(中國民航大學,天津 300300)
基于參數辨識的電動負載模擬器復合控制
王修巖,張革文,李宗帥
(中國民航大學,天津 300300)
針對電動負載模擬器運行過程中系統存在的參數時變問題,同時為了保證力矩精確加載,提出了自適應控制器與前饋補償控制器相結合的復合控制策略。引入了彈性桿以提高加載精度與系統穩定性;將自調整遺忘因子遞推最小二乘法與神經網絡相結合進行在線辨識系統時變參數,結合系統性能指標設計了模型參考自適應控制器;采用舵機位置前饋補償,實現多余力矩的抑制。通過仿真驗證了該復合控制策略的可行性和有效性。
電動負載模擬器;參數辨識;自適應控制;前饋補償;彈性桿
0 引 言
電動負載模擬器作為半實物仿真設備,其用于模擬飛行過程中飛行器舵機所受到的力矩載荷,其與機械式、電液式負載模擬器相比較,存在穩定高、體積小、噪聲小、維護方便[1]等優點,但是在動態加載過程中,舵機運動會產生多余力矩,其嚴重影響系統的載荷譜跟蹤精度[2]。由于加載系統本身其他的不確定因素的存在,如:參數時變、摩擦擾動等,增加了精確跟蹤的困難性。
目前,針對抑制多余力矩和減少系統本身不確定因素的影響,實現有效地跟蹤指令信號,國內外學者已經提出來大量的控制方案[3-13]。對于抑制多余力矩,主要采用前饋補償方法對位置擾動進行抑制,且基于線性化的數學模型設計控制器,然而在實際應用中存在局限性[6],引入神經網絡控制與PID控制相結合,用于彌補線性PID控制的不足[8-9];針對時變參數對系統的影響,學者提出了一些非線性的滑模自適應[7]和反步自適應的控制方法,并得到了一定的應用,但是滑膜自適應控制易使得系統產生高頻振蕩,往往需要設計較為復雜的控制器用于消除抖振,而反步自適應控制方法較為復雜,物理實現較為困難[12]。為了設計精度較高的負載模擬器,所要迫切解決系統非線性、多余力矩和參數時變等問題。
本文在以前研究的基礎上,針對系統參數時變問題,將自調整遺忘因子遞推最小二乘法與神經網絡相結合進行系統時變參數的在線辨識,設計了模型參考自適應控制器,結合舵機位置前饋補償,解決了參數時變問題,同時有效地抑制了多余力矩。仿真驗證了控制策略的有效性。
1 電動負載模擬器系統構成
電動負載模擬器的加載系統是利用直流力矩電機以轉矩的形式加載到承載系統上,承載系統用來模擬飛行器的舵機系統。通過模擬舵機承受的鉸鏈力矩,來測試舵機的指令跟蹤性能,根據實驗測得的數據,進一步改進舵機系統結構的設計。系統結構如圖1所示,由(實驗)舵機、力矩傳感器、彈性桿、力矩電機等部分組成。根據位置傳感器提供的角位置信息,仿真計算機得出舵機輸出軸上所需承受的力矩,且將加載指令發送給加載控制器,通過驅動器作用在加載電機上。加載電機使用直流力矩電機,其具有軟機械特性和寬調速范圍的特點,以恒力矩輸出、響應速度快、線性度好、過載能力強。系統中引入彈性桿元件同于連接直流力矩電動機與舵機,用以減弱相互間耦合,抑制多余力矩,增強控制系統的穩定性。

圖1 電動負載模擬器結構圖
2 系統的數學模型
2.1直流力矩電機的數學模型
電機的電樞可以等效為一個線性電阻和一個電感元件串聯。將舵機運動作為外部擾動,根據電壓平衡方程和轉矩平衡方程,分析得出加載系統的動態結構圖,如圖2所示。

圖2 加載系統的結構框圖
圖2中,Rm為電樞電壓;Rm為電樞回路總電阻;θr為舵機輸出角位移;KT為扭矩系數;Lm為電樞回路總電感;ωm為直流力矩電機角速度;θm為直流力矩電機角位移;KPWM為輸入電壓放大系數;Kc為剛度系數;Bm為直流力矩電機阻尼系數;Jm為等效轉動慣量;im為電樞電流;Ke為反電動勢系數。由圖2可以得到加載電機輸出轉矩的傳遞函數表達式:

其中:
2.2彈性桿
彈性桿用于直流力矩電機與舵機的連接,有效的抑制外部擾動的高頻部分,改善系統進度。由于舵機軸所受到的力矩是通過彈性桿彈性形變的方式加載的,此時忽略其他連接部分的彈性因素,彈性桿傳遞的力矩與桿兩端彈性連軸器的扭轉角位移之差成線性比例,輸出力矩:
其中:KL為彈性桿的剛度系數N·m/(°);θm為電機輸出軸的角位移。
彈性桿的剛度為彈性剛度,彈性剛度的大小與系統的性能有關。剛度系統過小時,系統響應速度可能不滿足高頻負載的要求;剛度系數過大時,導致控制系統快速性降低,同時系統多余力矩增加。因此剛度系數需要合理選擇,考慮到系統的最大梯度、加載精度等因數,結合工程經驗,得出彈性桿剛度系數略大于系統最大加載梯度,如公式(5)所示[3]:
其中:Kg為加載梯度;ωmax,αmax,ωr max,αr max分別為直流力矩電機最大角速度和角加速度、舵機最大角速度和角加速度;J為電機輸出軸等效轉動慣量;fH為舵機最大工作頻率。
2.3整體的數學模型
由式(1)和式(4)得出加載系統的轉矩傳遞函數:


3 加載系統控制器設計
電動機系統在長期運行過程中,其繞組、溫度變化和趨膚效應都會引起系統參數(Rm,Lm)發生變化,且部件間的摩擦等也可能造成參數改變,影響控制精度。因此,需要對系統參數進行在線辨識,將辨識后的參數用于設計控制器,從而達到實時跟蹤理想輸入的目的。系統復合控制結構如圖3所示。
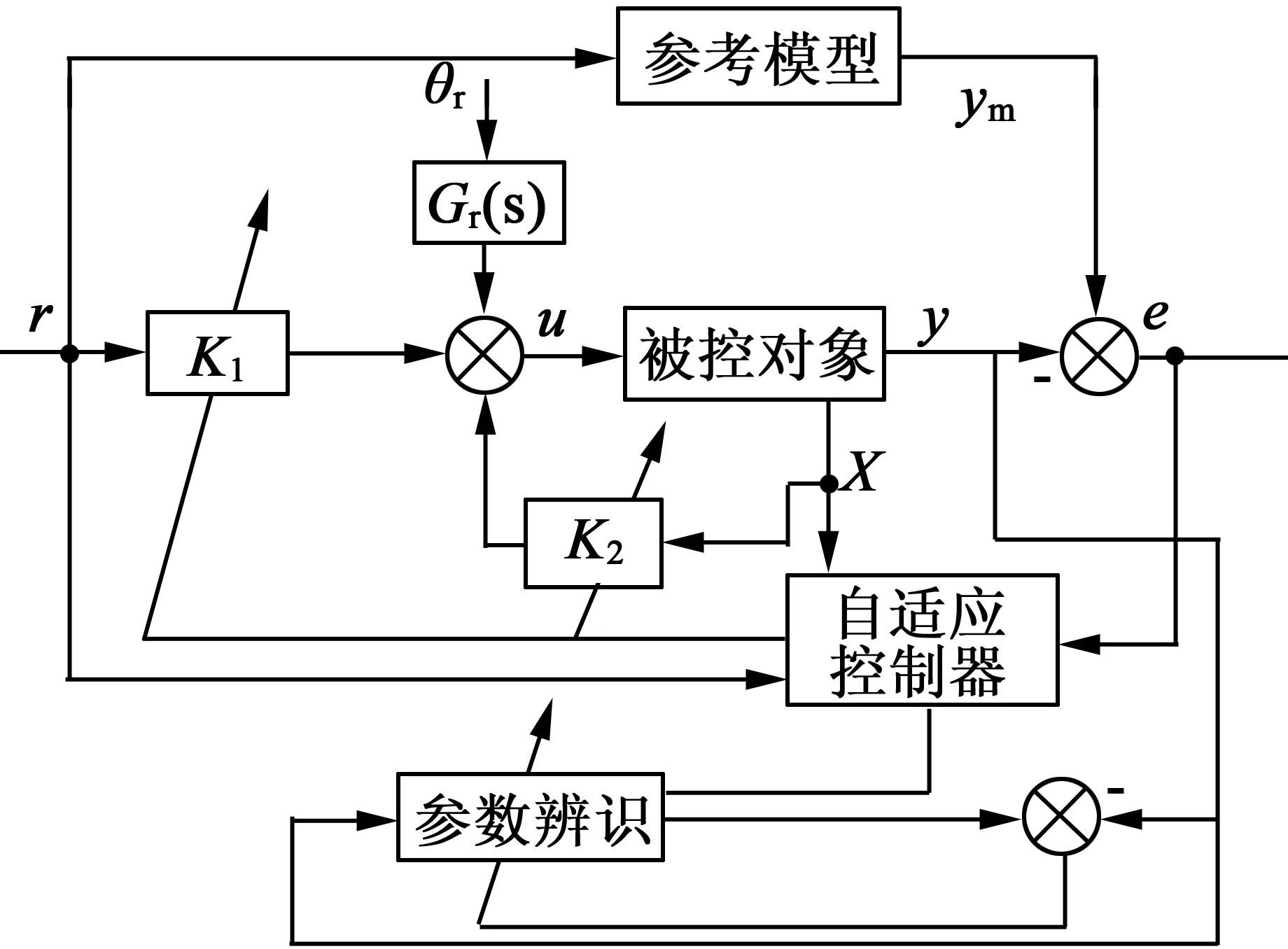
圖3 復合控制結構圖
3.1前饋補償控制器
由式(6)可以看出,在加載過程中舵機運動使得加載系統產生多余的力矩,多余力矩嚴重影響系統的加載精度,為了保證力矩的加載精度結合結構不變原理,文獻[3]提出了舵機位置前饋補償,去抑制多余力矩,減少系統噪聲,如圖4所示。根據結構不變性原理,控制器G1(s)應為比例和微分形式。

圖4 前饋補償力矩控制圖
3.2參數的在線辨識
3.2.1自調整遺忘因子遞推最小二乘法
系統采用RBF神經網絡自調整遺忘因子遞推最小二乘法處理參數時變問題,不但能夠解決傳統最小二乘法在參數辨識過程中的數據飽和問題[5],同時克服了定常遺忘因子難以及時跟隨動態變化的問題,同時利用RBF神經網絡的全局逼近性質和最佳逼近性質,更有效地跟蹤時變參數。將系統方程寫成:
其中:z-d為傳輸延時;ξ(k)為系統的總噪聲;u(k)為系統輸入;y(k)為系統輸出,且
A(z-1)=1+a1z-1+…+anz-n
B(z-1)=b0+b1z-1+…+bmz-m
式(7)又等于:
y(k)=-a1y(k-1)-…-any(k-n)+
b0u(k-d)+…+bmu(k-d-m)+ξ(k)=


3.2.2 預測誤差的RBF神經網絡
根據系統的部分原始參數進行在線辨識,圖5為參數跟蹤對比圖。
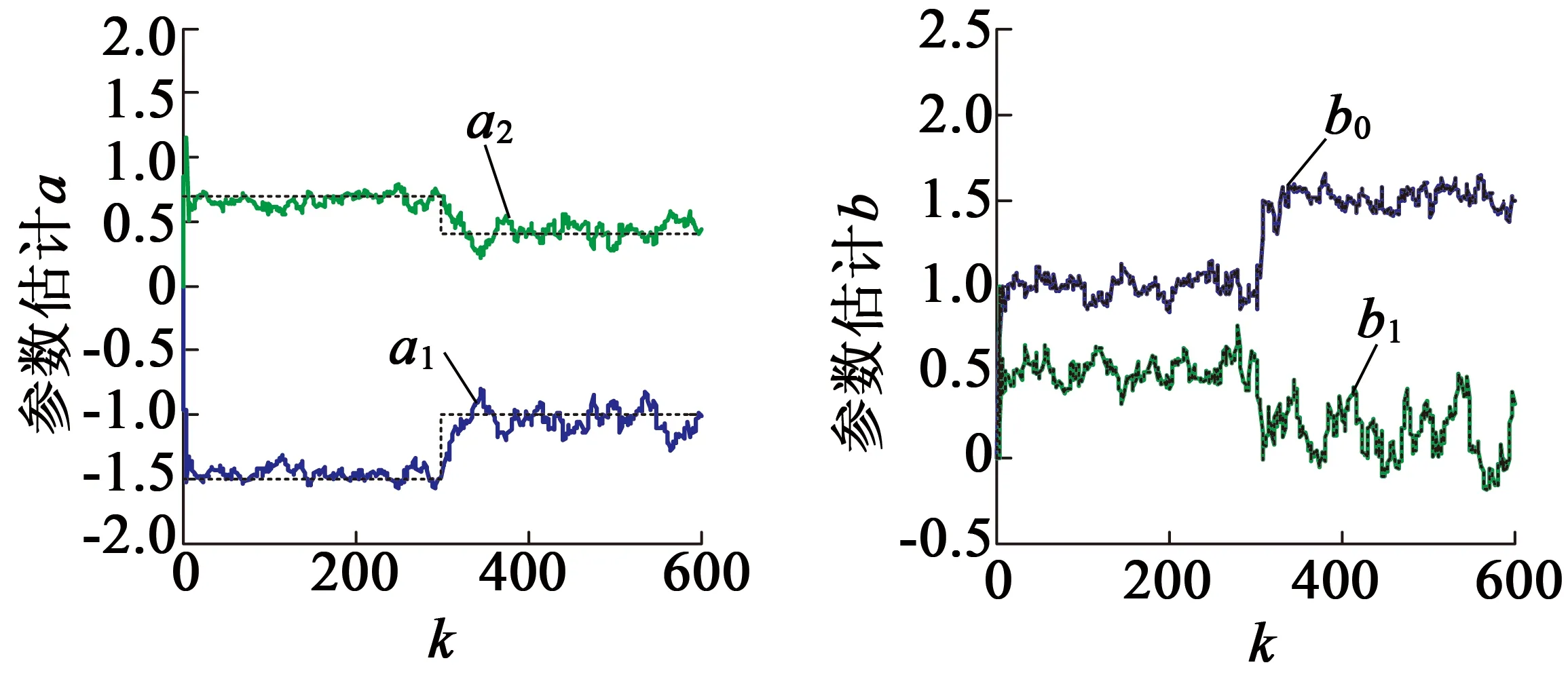
(a) 自調整遺忘因子的遞推最小二乘法
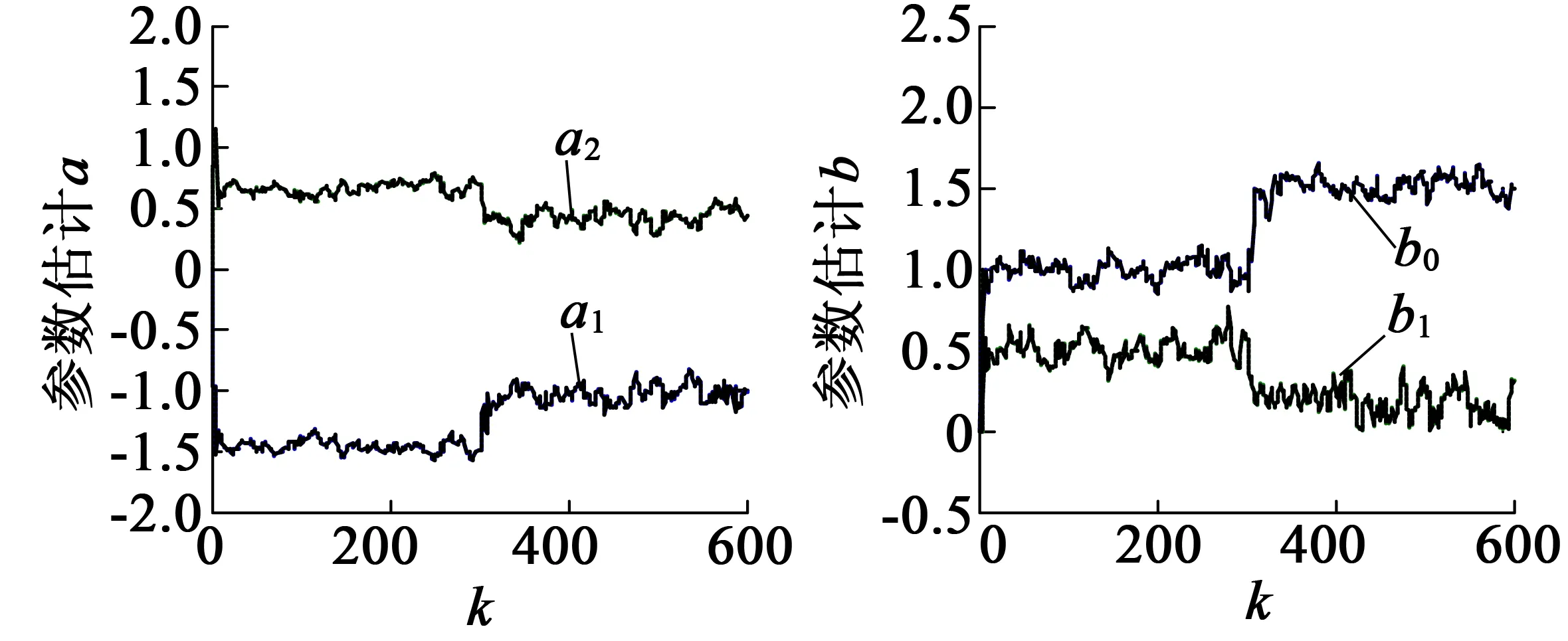
(b) RBF神經網絡自調整遺忘因子遞推最小二乘法
得到A=[1 -1.5 0.5],B=[1 0.5];在系統運行過程進行參數突變,在第301步時,參數變為A=[1 -1 0.4],B=[1.5 0.2],在辨識過程添加了噪聲干擾。通過圖5得知,參數突變時跟蹤的過程會出現波動,但自調整遺忘因子的遞推最小二乘法能夠較好的進行快速時變參數的辨識,但是在參數突變后參數的辨識受干擾影響較大,加入神經網絡后,參數跟蹤的效果有所提高,同時辨識過程受干擾的影響明顯減小。
3.3控制器設計

系統參數如表1所示。
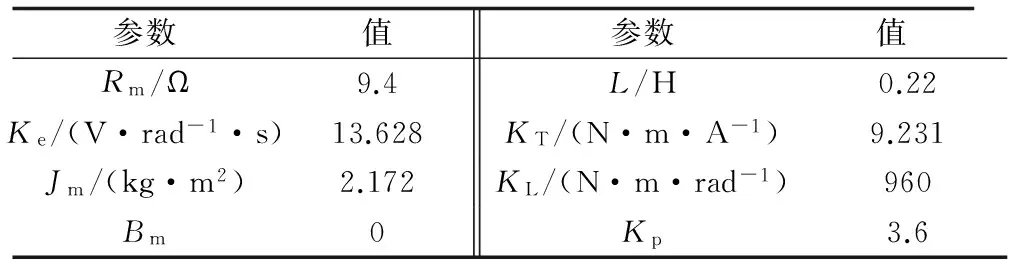
表1 系統參數
4 仿真結果與分析
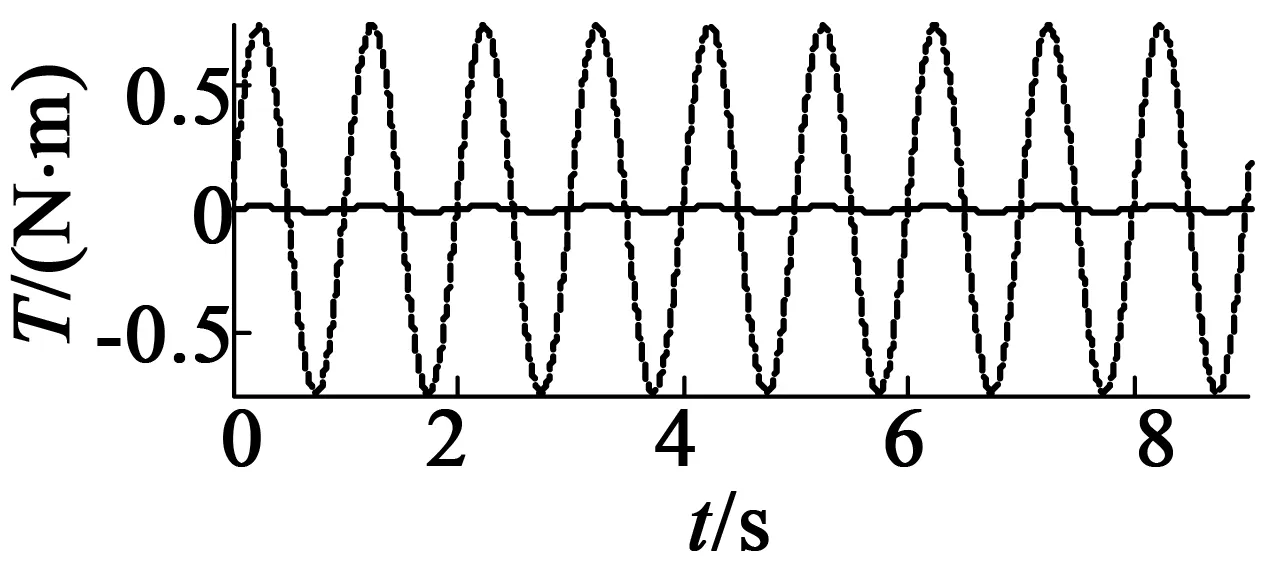
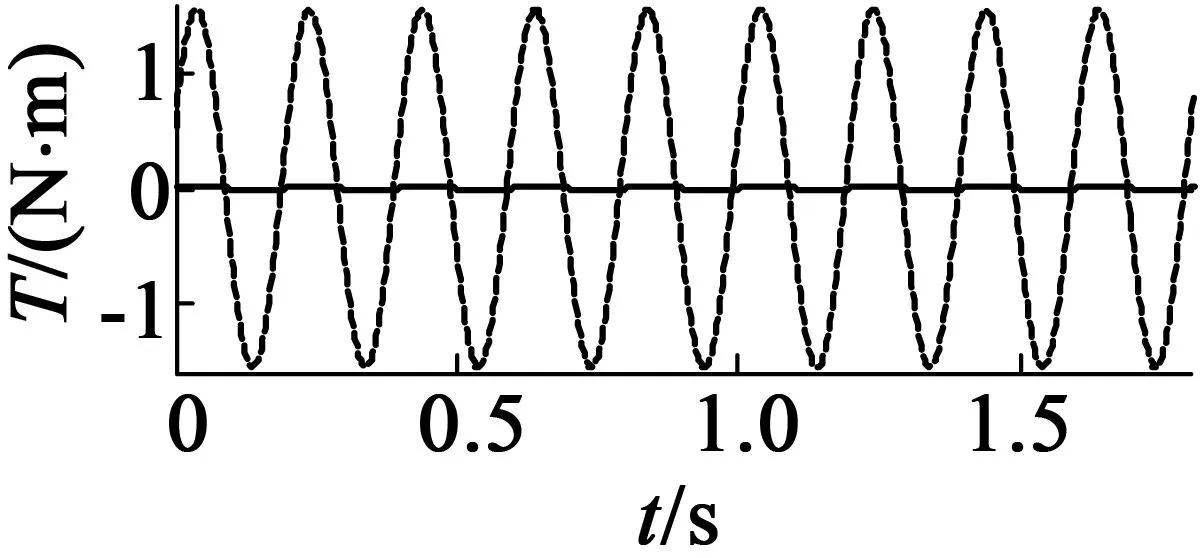
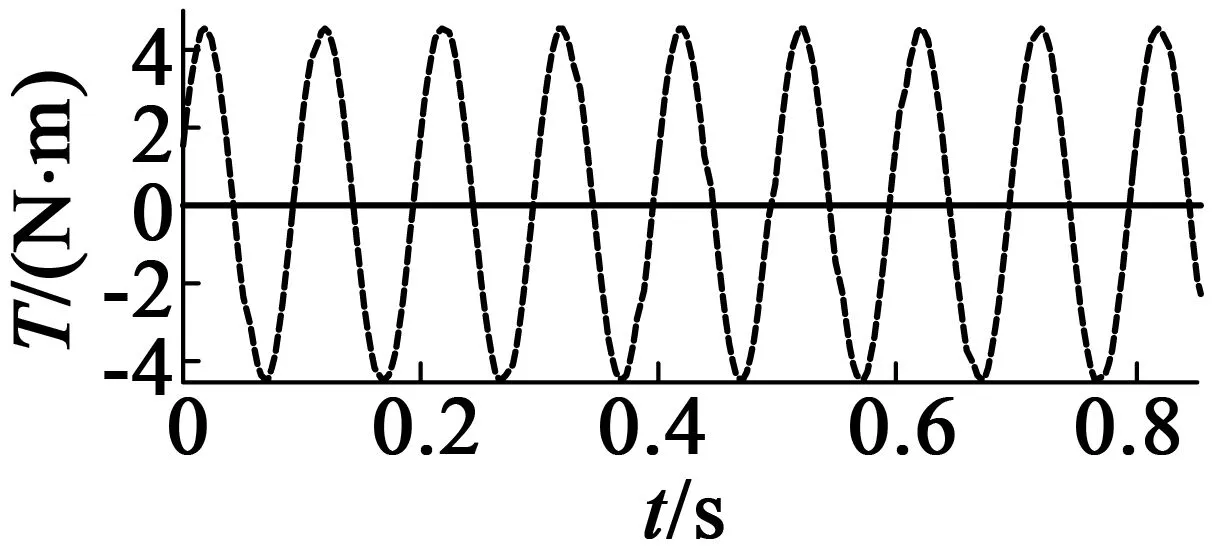
為了驗證復合控制策略能否達到評價指標的要求,本文進行了仿真實驗。對應圖6為三種頻率下的跟蹤效果,明顯看出采用復合控制方法得到好的跟蹤效果,如圖6(c)舵機按正弦規律運動,其幅值為0.4N·m,頻率為10Hz;加載系統跟蹤幅值20N·m,頻率10Hz的正弦波信號,跟蹤效果如圖6所示,虛線是跟蹤曲線,實線是理想曲線,幅值差1.9%,相位差為2.7°。容易滿足“雙十”指標[7]。將舵機位置前饋補償與復合控制比較,不同頻率下多余力矩抑制效果如圖7所示。
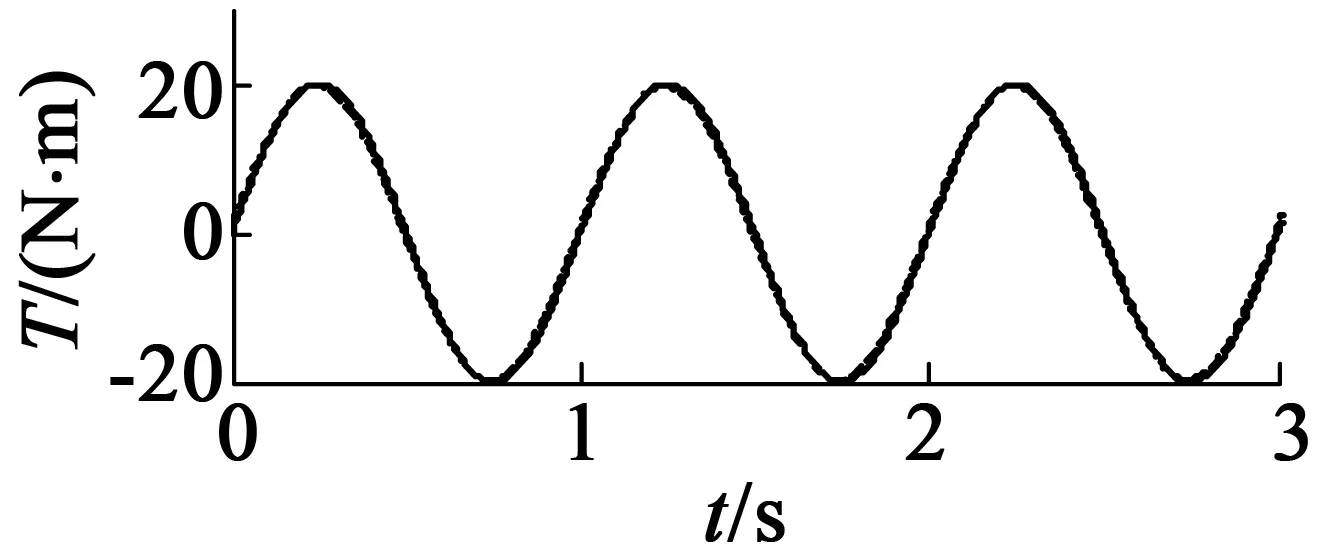
(a) 1 Hz力矩加載曲線

(b) 5 Hz力矩加載曲線
(c) 10 Hz力矩加載曲線
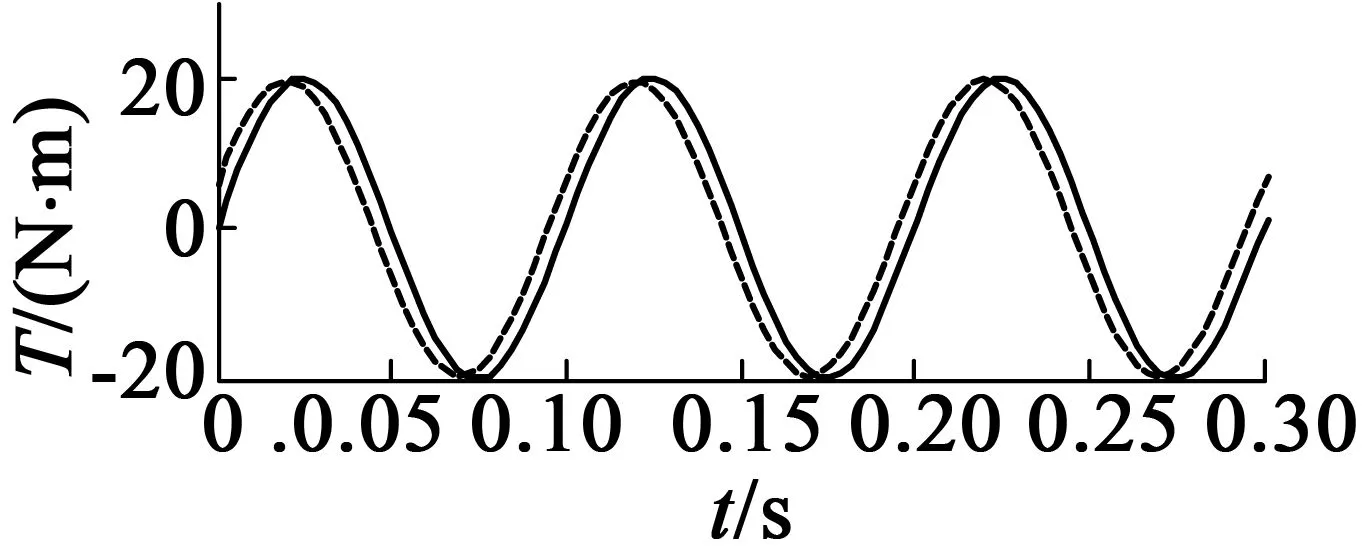
(a) 1 Hz力矩加載曲線
(b) 5 Hz力矩加載曲線
(c) 10 Hz力矩加載曲線
圖7中,虛線為舵機位置前饋補償下得出的多余力矩,實線是復合控制策略下得出的多余力矩,由圖能夠看出在復合控制策略下多余力矩抑制效果更好。
5 結 語
本文為提高電動負載模擬器力矩加載精度及系統穩定性,引入了彈性桿元件。針對電動負載模擬器長期運行系統存在參數時變的問題,通過將自調整遺忘因子遞推最小二乘法與神經網絡相結合在線辨識時變參數,設計了模型參考自適應控制器,提高了系統對輸入信號的跟蹤性能;同時,與前饋補償相結合,實現了多余力矩抑制,控制系統對外部干擾有較強的魯棒性;最后,通過仿真結果驗證了復合控制策略的有效性。
[1] 田巨,張科.電動負載模擬器的發展與現狀[J].微特電機,2014,42(5):70-74.
[2] 李成功,靳紅濤,焦宗夏.電動負載模擬器多余力矩產生機理及抑制[J].北京航空航天大學學報,2006,32(2):204-208.
[3] 牛國臣,王巍,宗光華.基于迭代學習的電動負載模擬器復合控制[J].控制理論與應用,2014,31(12):1740-1747.
[4] 任玉凱,楊瑞峰,郭晨霞,等.電動負載模擬器的復合控制策略研究[J].中國測試,2015,41(4):98-101.
[5] 王修巖,楊森,李宗帥.電動負載模擬系統的復合控制器設計[J].微特電機,2014,42(12):62-65.
[6] 李瑞,王明艷.電動負載模擬器抑制多余力的結構補償控制[J].機床與液壓,2013(3):62-64,40.
[7] 楊芳,袁朝輝.電液負載模擬器的自適應滑模控制方法[J].計算機仿真,2011,28(11):168-171.
[8] 沈東凱,華清,王占林.基于神經網絡的電動加載系統[J].航空學報,2002,23(6):525-529.
[9] 張健. 基于RBF神經網絡的電動負載模擬器控制策略研究[D].哈爾濱:哈爾濱工業大學,2006.
[10] 焦宗夏,華清,王曉東,等.負載模擬器的評價指標體系[J].機械工程學報,2002,38(11):26-30.
[11] 符文星,孫力,于云峰,等.電動負載模擬器控制系統設計[J].西北工業大學學報,2008,26(5):621-625.
[12] 張彪.電液負載模擬器多余力矩抑制及其反步自適應控制研究[D].哈爾濱:哈爾濱工業大學,2009.
[13] 王愛力.時變系統模型辨識方法的研究[D].無錫:江南大學,2008.
CompositeControlforElectricLoadSimulatorBasedonParameterEstimation
WANGXiu-yan,ZHANGGe-wen,LIZong-shuai
(Civil Aviation University of China,Tianjin 300300,China)
For the problem of parameters changing and in order to increase loading accuracy, a hybrid control method based on adaptive control and feed-forward control was proposed. The spring beam was used to improve the loading accuracy and the system stability. Using the parameters identified on-line by auto-regulation forgetting factor least square algorithm combined with neural-network and performance indicator of system, model reference adaptive control. The feed-forward compensation of the rudder angular displacement was introduced into the torque control to decrease surplus torque.The feasibility and effectivity of the method are also proved by simulation.
electric load simulation; parameter estimation; adaptive control; feed-forward compensation; spring beam
2015-08-03
國家自然科學基金委員會-中國民航局民航聯合研究基金項目(U1433107)
TM33;TM359.6
:A
:1004-7018(2016)11-0057-05
王修巖(1965-)男,博士,教授,主要從事檢測技術、智能控制方面的研究。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32