不同控制規(guī)律的雙閉環(huán)直流電機(jī)速度控制比較研究
2016-08-28 02:08:14張海明妥杏娃
微特電機(jī) 2016年11期
關(guān)鍵詞:系統(tǒng)
張海明,妥杏娃
(蘭州交通大學(xué),蘭州 730070)
不同控制規(guī)律的雙閉環(huán)直流電機(jī)速度控制比較研究
張海明,妥杏娃
(蘭州交通大學(xué),蘭州 730070)
雙閉環(huán)直流調(diào)速系統(tǒng)廣泛應(yīng)用于工業(yè)控制領(lǐng)域,本文研究了雙閉環(huán)直流調(diào)速系統(tǒng)的速度調(diào)節(jié)器在使用普通PI,模糊自適應(yīng)PI、Anti-Windup PI和模糊控制等方法的控制性能,通過在MATLAB/Simulink平臺仿真試驗(yàn),不同控制算法在電機(jī)起動(dòng)、抗負(fù)載擾動(dòng)和抗電網(wǎng)電壓擾動(dòng)等性能的特點(diǎn)進(jìn)行了對比研究。
直流電動(dòng)機(jī);模糊控制;模糊自適應(yīng)PI控制;Anti-Windup控制
0 引 言
直流調(diào)速系統(tǒng)一直在工業(yè)控制領(lǐng)域占主要地位[1]。高性能的調(diào)速系統(tǒng)應(yīng)具有良好的速度跟隨性能和抗負(fù)載等擾動(dòng)的調(diào)節(jié)性能。直流電動(dòng)機(jī)因?yàn)閿?shù)學(xué)模型較簡單,易控制、調(diào)速范圍較寬等特點(diǎn)一直能在工業(yè)領(lǐng)域廣泛應(yīng)用。實(shí)際應(yīng)用中,基于PI的雙閉環(huán)直流調(diào)速系統(tǒng)已廣泛應(yīng)用。但傳統(tǒng)PI控制是在線性區(qū)域設(shè)計(jì)的,只能保證線性區(qū)域內(nèi)有良好的特性,系統(tǒng)一旦輸入有突變或有大的擾動(dòng)時(shí),PI控制器會(huì)進(jìn)入飽和非線性區(qū)域,此時(shí)調(diào)速特性會(huì)變差。并且傳統(tǒng)的PI控制對系統(tǒng)參數(shù)變化敏感,當(dāng)控制系統(tǒng)的參數(shù)因溫度、老化等原因發(fā)生變化時(shí),一套固定參數(shù)的PI控制器不能滿足控制系統(tǒng)的動(dòng)、靜態(tài)性能。因此為改善傳統(tǒng)PID的不足,學(xué)者們提出了不同的策略:PID控制器的積分飽和現(xiàn)象可以用Anti-Windup 控制器消除[2],模糊自適應(yīng)PID[2,4-5]可以根據(jù)控制對象參數(shù)的變化進(jìn)行PID 參數(shù)的自整定。為了更進(jìn)一步提高控制效果,模糊控制算法廣泛的應(yīng)用于電機(jī)調(diào)速系統(tǒng)中,如文獻(xiàn)[3,6-7]。
盡管學(xué)者們對雙閉環(huán)直流調(diào)速系統(tǒng)針對不同控制方法進(jìn)行了分別研究,但是并沒有將各種方法進(jìn)行總結(jié)和對比研究。本文主要對比研究雙閉環(huán)直流調(diào)速系統(tǒng)的速度控制器在使用不同控制算法(如普通PI、模糊自適應(yīng)PI、Anti-Windup PI和模糊控制下的控制性能)的特性。通過研究不同速度控制器的跟隨性能、抗負(fù)載擾動(dòng)及抗電網(wǎng)電壓干擾性能。通過在MATLAB/Simulink平臺下仿真實(shí)驗(yàn)對比分析了各種控制器優(yōu)缺點(diǎn),為雙閉環(huán)直流調(diào)速系統(tǒng)在不同應(yīng)用場合的選用提供了理論參考依據(jù)。
1 直流電動(dòng)機(jī)控制系統(tǒng)
轉(zhuǎn)速、電流雙閉環(huán)直流調(diào)速系統(tǒng)是應(yīng)用最廣、性能較好的直流調(diào)速系統(tǒng)。為了實(shí)現(xiàn)轉(zhuǎn)速負(fù)反饋和電流負(fù)反饋分別起作用,系統(tǒng)設(shè)置了轉(zhuǎn)速外環(huán)(ASR)和電流內(nèi)環(huán)(ACR),具體結(jié)構(gòu)如圖1所示[10]。
在雙閉環(huán)控制系統(tǒng)中為使電動(dòng)機(jī)獲得最大的允許電流而加快電機(jī)的動(dòng)態(tài)過程,設(shè)計(jì)了ACR,而在ASR調(diào)節(jié)過程中ACR起著跟隨作用,為了研究方便,本文中的ACR采用普通PI。
通常,速度是調(diào)速系統(tǒng)的最終控制目標(biāo)。不同使用場合對調(diào)速性能要求是不一樣的。為了滿足各種應(yīng)用場合的需要,比較不同控制算法的特性,本文的速度控制器分別采用了普通PI、模糊自適應(yīng)PI及Anti-Windup PI和模糊控制器。
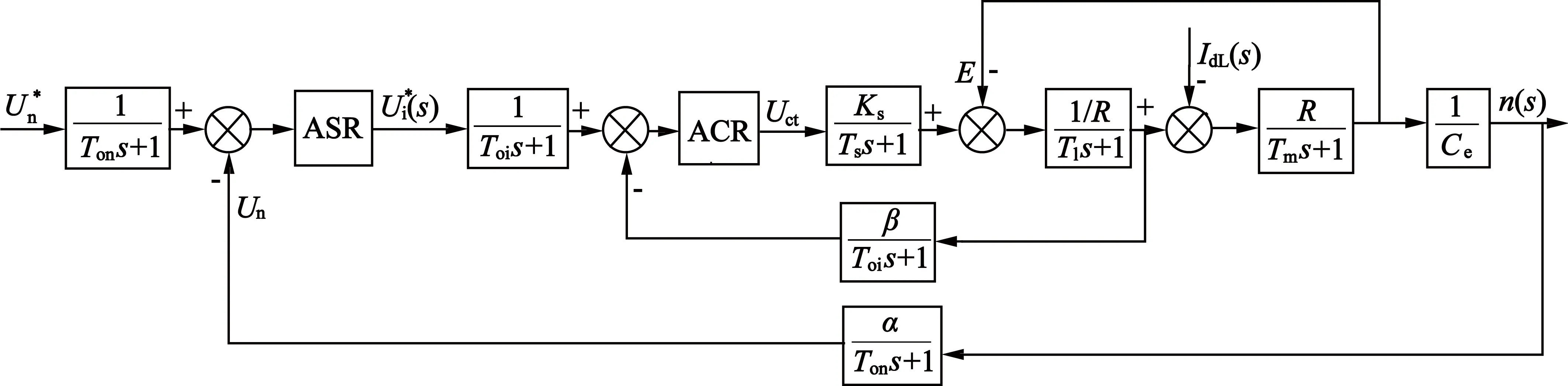
圖1 雙閉環(huán)直流電機(jī)調(diào)速系統(tǒng)
2 速度控制器設(shè)計(jì)
2.1普通PI控制器
普通PI控制由于其結(jié)構(gòu)簡單、容易實(shí)現(xiàn)是雙閉環(huán)控制系統(tǒng)最常用的控制方式,其傳遞函數(shù):

式中:Kp,Ki為比例和積分增益。Kp,Ki的參數(shù)通過工程設(shè)計(jì)方法并通過仿真找到最優(yōu)的值,具體參數(shù)如表1所示。

表1 PI控制器參數(shù)
2.2Anti-WindupPI控制器
當(dāng)速度給定輸入一個(gè)大階躍值或者負(fù)載突變時(shí),傳統(tǒng)PI控制器由于積分飽和原因無法使系統(tǒng)在實(shí)現(xiàn)響應(yīng)快速性的同時(shí)能滿足小超調(diào),使實(shí)際閉環(huán)的性能下降,這種現(xiàn)象被稱為Windup現(xiàn)象[11],這是因?yàn)楫?dāng)系統(tǒng)出現(xiàn)大的誤差輸入或長時(shí)間有一恒定的誤差輸入時(shí),由于積分作用,使速度控制器進(jìn)入飽和,此時(shí)速度環(huán)相當(dāng)于開路。本文用Anti-WindupPI控制以減小速度控制器飽和現(xiàn)象。
采用A.S.Hodel等提出的Anti-WindupPI控制算法,其控制規(guī)律為[12]:
(1)

u(t)=KPe(t)+KIφ
式中:KP,KI的取值分別為12和134.48。
2.3模糊自適應(yīng)PI控制器
在實(shí)際應(yīng)用中,被控對象隨著負(fù)載變化等干擾因素的影響或溫升等原因使電機(jī)本身參數(shù)發(fā)生變化時(shí),固定參數(shù)的PI控制器的控制效果會(huì)降低。模糊自適應(yīng)PI控制結(jié)構(gòu)如圖2所示,該控制器可以根據(jù)對象的變化實(shí)時(shí)修改PI參數(shù)以適應(yīng)控制要求。
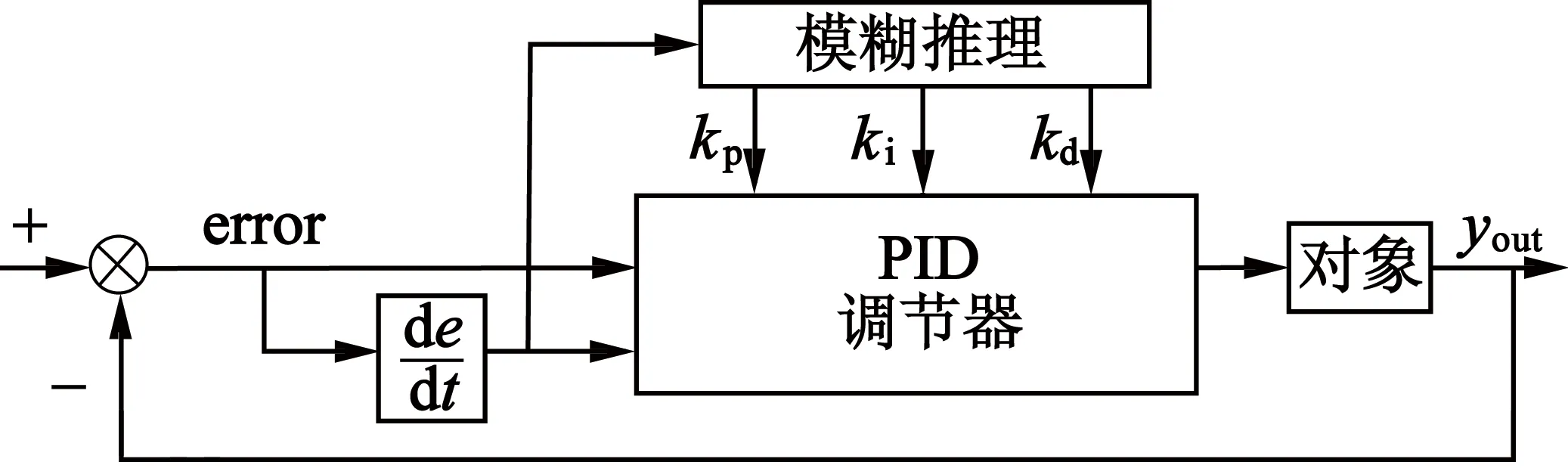
圖2 模糊自適應(yīng)PI控制器結(jié)構(gòu)
為了滿足不同時(shí)刻對PID參數(shù)自整定的要求,控制器以速度偏差(E)和速度偏差變化率(DE)為輸入,輸出為比例系數(shù)增益(ΔKp)和積分系數(shù)增益(ΔKi)。它們都用(NB,NS,ZO,PB,PS)來描述[4]。E論域?yàn)閇-10,10],DE論域?yàn)閇-500,500],ΔKp論域?yàn)閇-1,1],ΔKi論域?yàn)閇-1,1]。精確化方法選用重心法,四個(gè)變量的隸屬度函數(shù)皆為三角形。ΔKp和ΔKi的模糊控制規(guī)則如表2和表3所示。
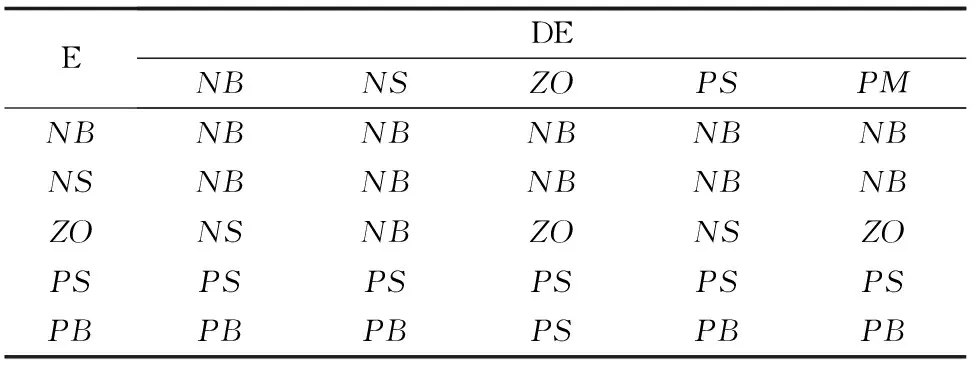
表2 ΔKp模糊控制規(guī)則
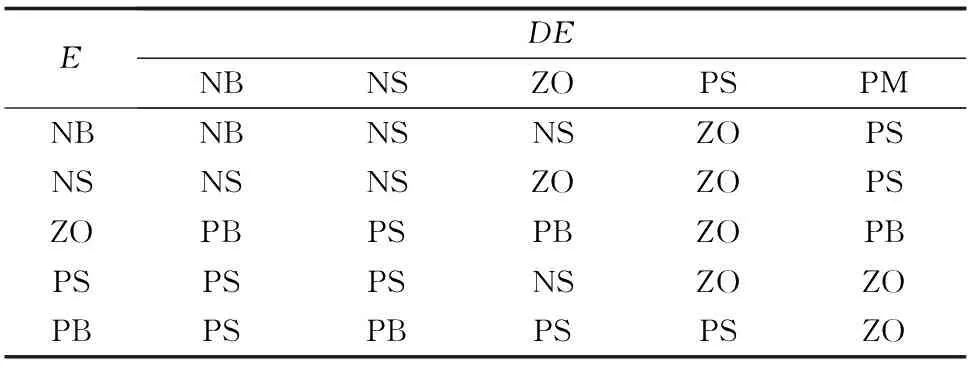
表3 ΔKi的模糊控制規(guī)則
模糊自適應(yīng)PI控制是找出PI控制器的輸入?yún)?shù)E和DE之間的模糊關(guān)系,通過運(yùn)行過程中不斷檢測E和DE對控制參數(shù)的不同要求,從而實(shí)時(shí)的修改PI控制器的參數(shù),而使被控對象有良好的動(dòng)、靜態(tài)性能。
2.4模糊控制
若被控制對象模型或參數(shù)不明確,易干擾或具有非線性,模糊邏輯控制器可以使系統(tǒng)的調(diào)速范圍變的更寬。模糊控制由于不需要建立控制對象精確的數(shù)學(xué)模型,作為一種人工智能手段,將輸入量按模糊規(guī)則自動(dòng)進(jìn)行推理,模仿專家經(jīng)驗(yàn)獲取問題的求解,具有良好的魯棒性。在雙閉環(huán)調(diào)速系統(tǒng)中速度調(diào)節(jié)器模糊控制器,如圖3所示。
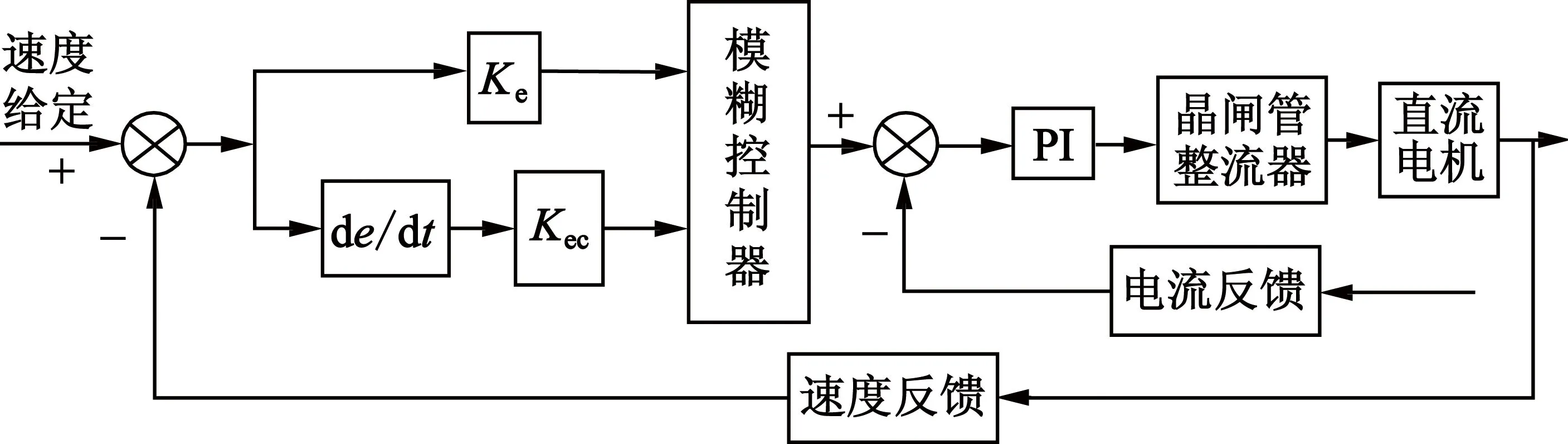
圖3 基于模糊PI控制的雙閉環(huán)直流調(diào)速系統(tǒng)的結(jié)構(gòu)圖
模糊控制器輸入為速度偏差(E)和速度偏差變化率(DE),輸出為控制信號(U),都用7個(gè)語言變量來描述,為(NB,NM,NS,ZE,PS,PM,PB)。E的論域?yàn)閇-10,10],DE的論域?yàn)閇-500,500],U的論域?yàn)閇-30,30]。模糊控制規(guī)則如表4所示。
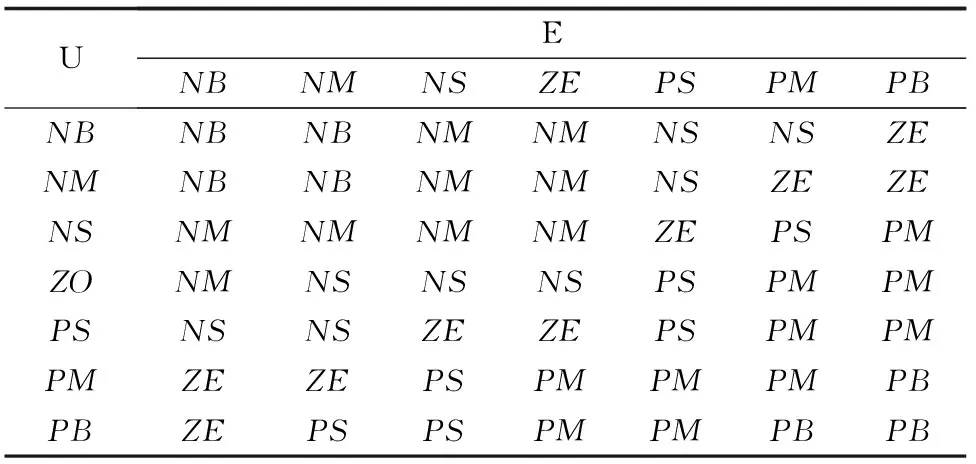
表4 模糊控制規(guī)則
3 仿真試驗(yàn)分析
為了比較不同控制器的跟隨性能和抗負(fù)載擾動(dòng)能力,在不同速度調(diào)節(jié)器作用下首先使系統(tǒng)空載啟動(dòng)并在0.8 s時(shí)突加負(fù)載擾動(dòng),速度和電樞電流響應(yīng)仿真結(jié)果如圖4所示。
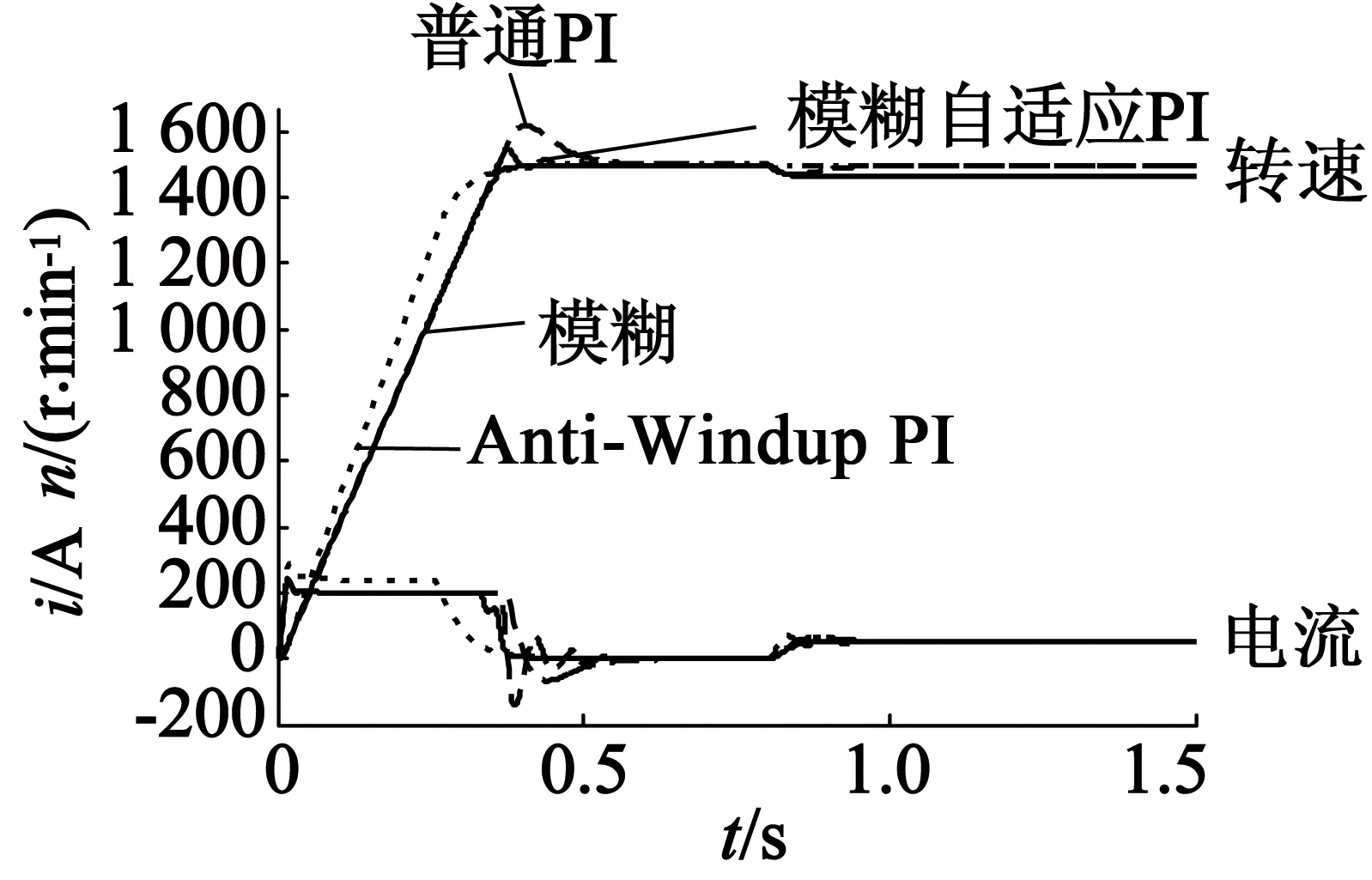
圖4 空載啟動(dòng)0.8 s加負(fù)載的響應(yīng)
仿真結(jié)果表明,空載啟動(dòng)時(shí),模糊控制的響應(yīng)速度最快,其次是Anti-Windup PI控制速度較快,模糊控制的調(diào)節(jié)時(shí)間是0.37 s,Anti-Windup PI控制的調(diào)節(jié)時(shí)間是0.42 s。模糊自適應(yīng)PI控制和普通PI的響應(yīng)比較慢,調(diào)節(jié)時(shí)間分別是0.51 s和0.54 s。普通PI的超調(diào)量最大,其次是模糊自適應(yīng)PI控制,它們的超調(diào)量分別是8%和3.2%,模糊自適應(yīng)PI的超調(diào)量盡管稍低于普通PI,但是模糊自適應(yīng)PI調(diào)節(jié)過程中振蕩次數(shù)較多。而模糊控制和Anti-Windup PI控制是在啟動(dòng)時(shí)是無超調(diào)的,啟動(dòng)時(shí)速度放大如圖5所示。
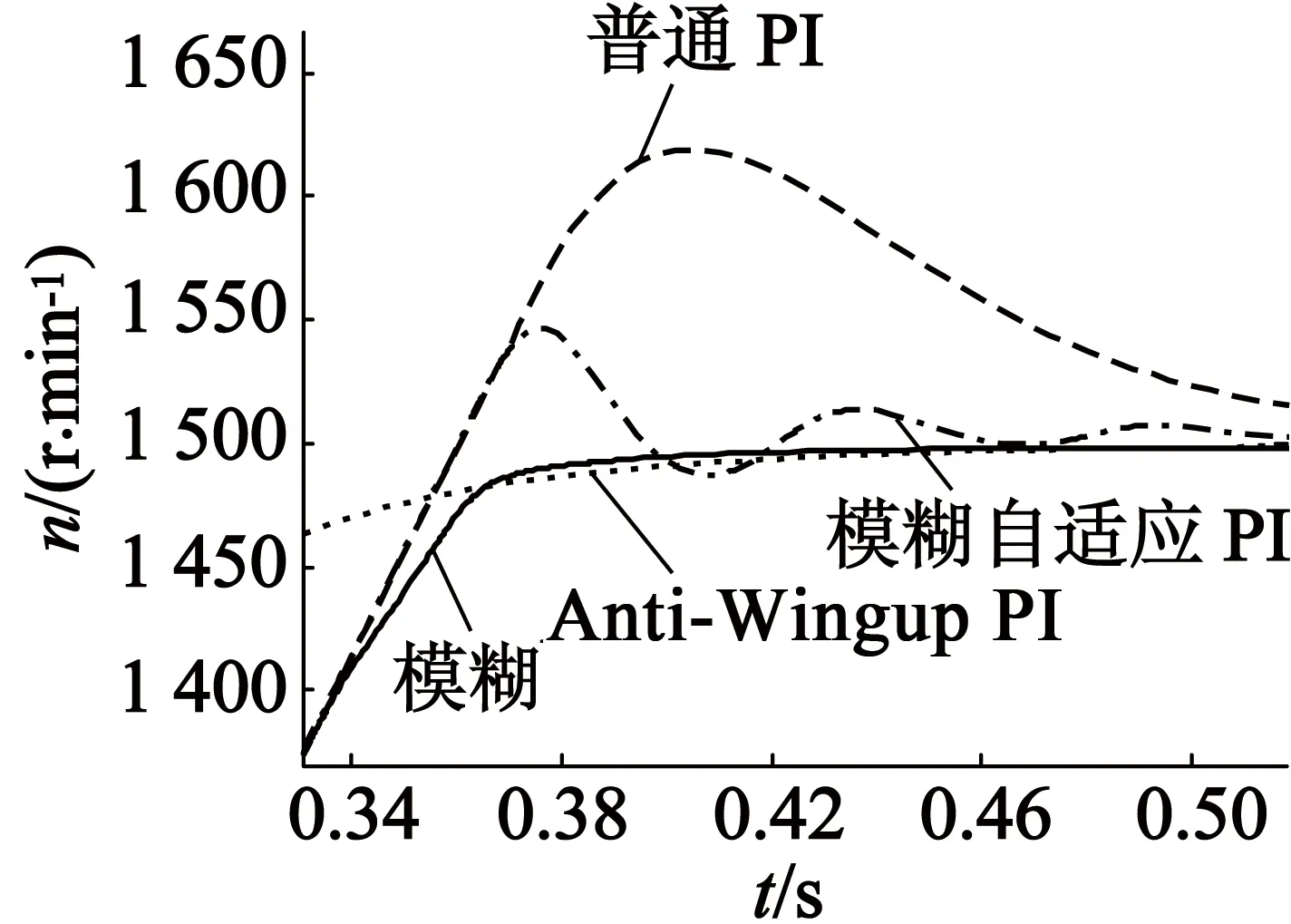
圖5 啟動(dòng)時(shí)的速度響應(yīng)
系統(tǒng)啟動(dòng)后在0.8 s突加負(fù)載擾動(dòng),在加載情況下,模糊自適應(yīng)PI控制盡管有小的振蕩,但響應(yīng)是最快的。其次是Anti-Windup PI和普通PI響應(yīng)較快。而模糊控制的響應(yīng)最慢,同時(shí)模糊控制在加載時(shí)的超調(diào)量也是最大,并且在系統(tǒng)穩(wěn)定時(shí)有靜差,而其他3種控制因有積分控制,在穩(wěn)定時(shí)是無靜差的。加載時(shí)的速度放大圖如圖6所示。
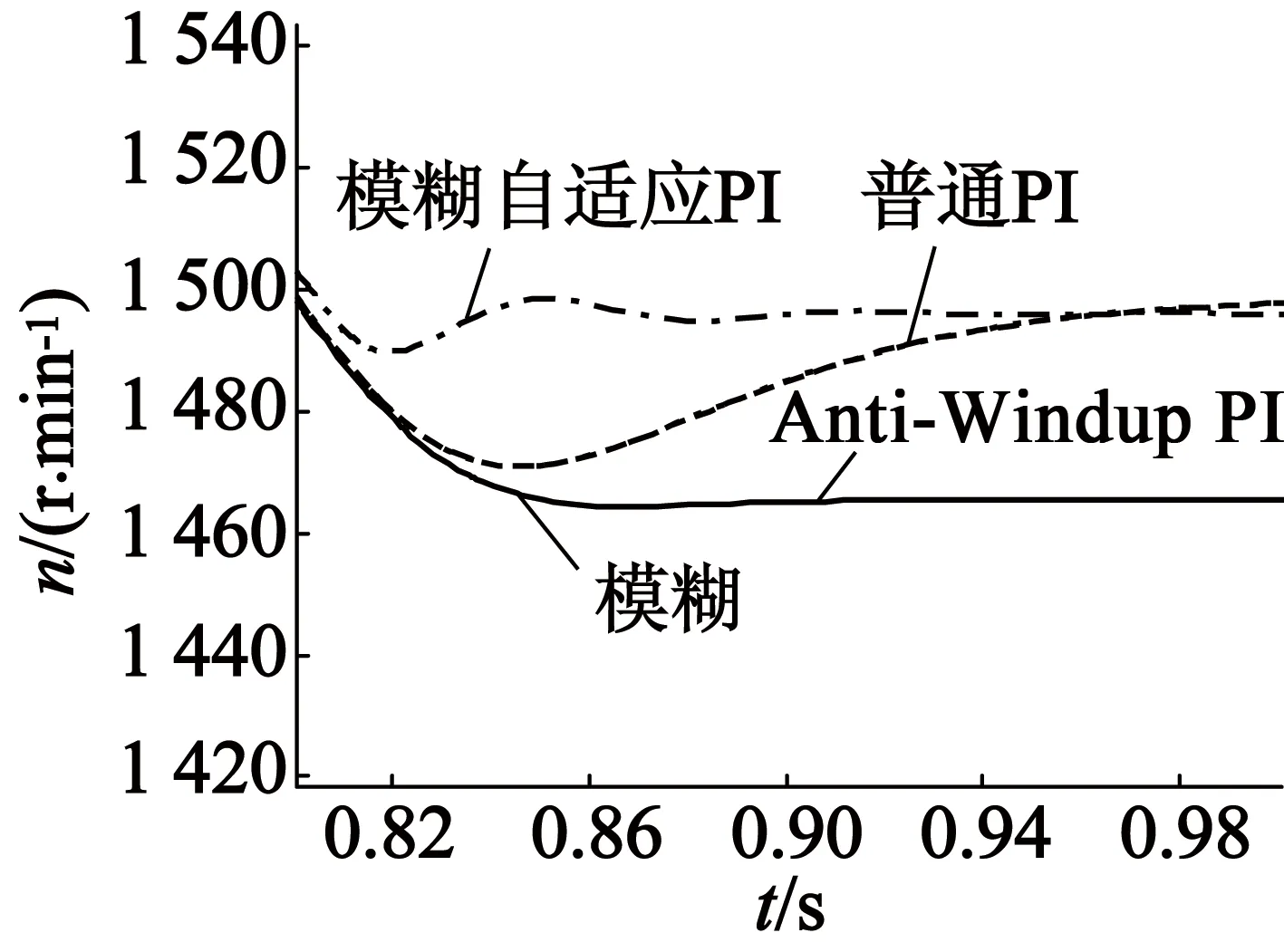
圖6 加載時(shí)速度響應(yīng)
直流電機(jī)的輸出轉(zhuǎn)矩正比于電樞電流,電樞電流直接決定著電機(jī)轉(zhuǎn)速的穩(wěn)定運(yùn)行。雙閉環(huán)直流調(diào)速系統(tǒng)中,速度調(diào)節(jié)器的輸出是電流調(diào)節(jié)器的給定輸入,速度調(diào)節(jié)器的輸出如圖7。由圖7可看出電流調(diào)節(jié)器的給定輸入和控制系統(tǒng)的速度輸出變化時(shí)相對應(yīng)的。
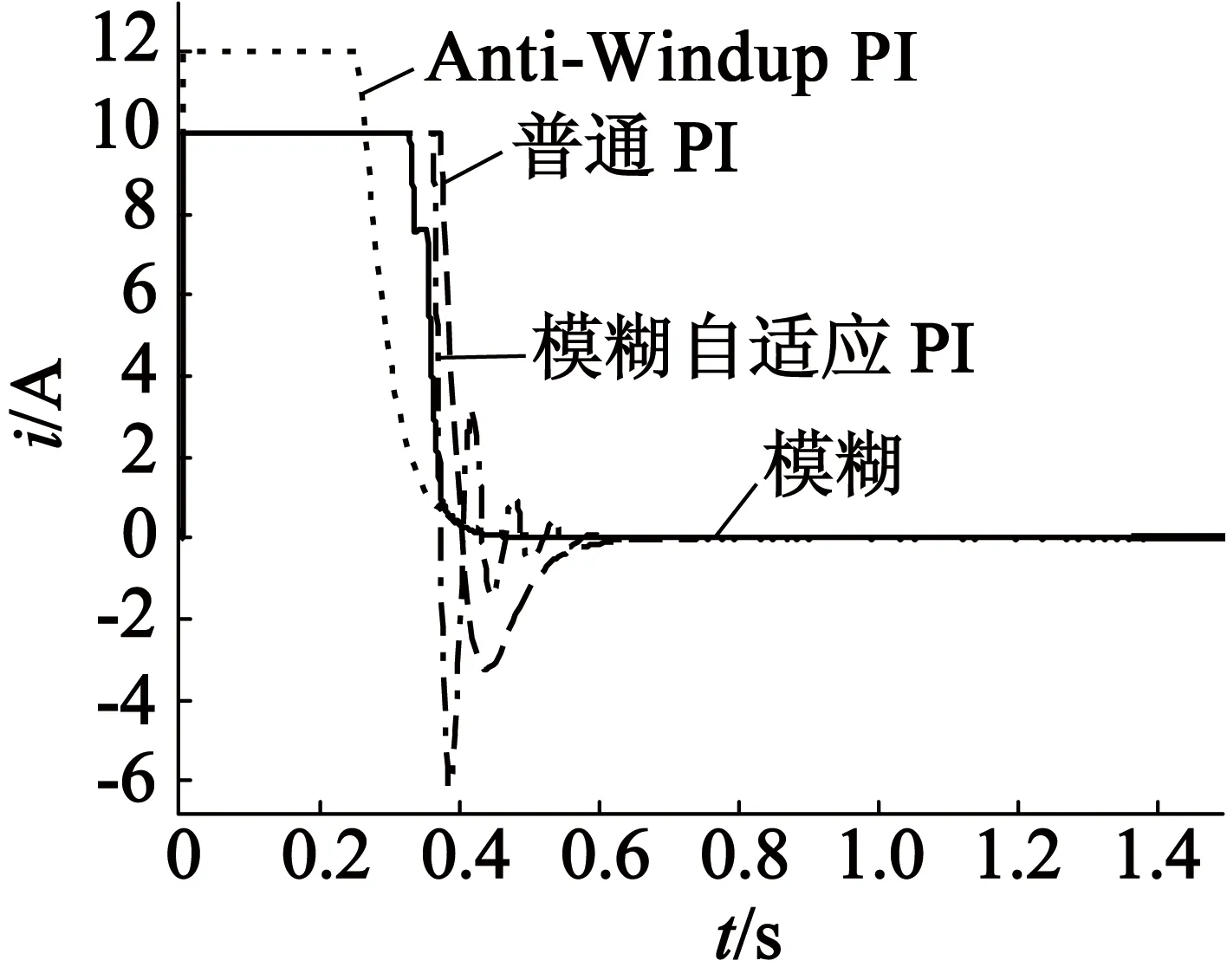
圖7 速度調(diào)節(jié)器的輸出
實(shí)際應(yīng)用中電網(wǎng)電壓變化是常見的擾動(dòng),為了比較不同控制方法的抗電網(wǎng)電壓擾動(dòng)的效果,在0.8 s電網(wǎng)電壓突然增大的擾動(dòng),仿真結(jié)果如圖8所示。
當(dāng)電網(wǎng)電壓突然增大時(shí),模糊控制引起的速度變化最小,僅僅比穩(wěn)定時(shí)速度大了5r/min,并且以比較快的時(shí)間(0.1 s)就恢復(fù)到穩(wěn)定的狀態(tài)。而模糊自適應(yīng)PI變化最大,變化為10 r/min,普通PI和Anti-Windup PI增大了7 r/min。
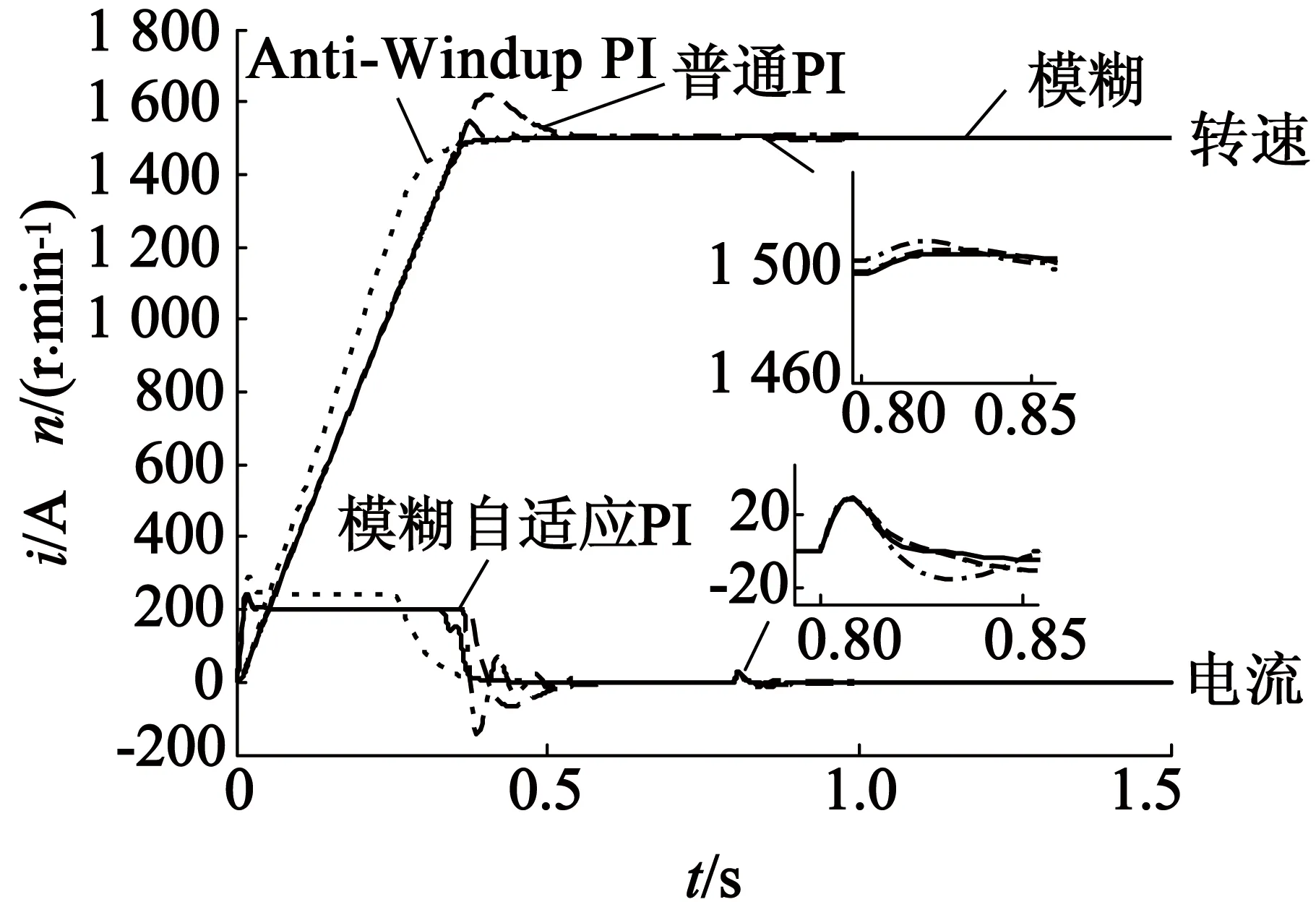
圖8 電壓增大時(shí)輸出響應(yīng)
4 結(jié) 論
本文主要研究了雙閉環(huán)直流調(diào)速系統(tǒng)速度控制器分別為普通PI、Anti-Windup PI、模糊自適應(yīng)PI和模糊控制四種控制器的控制特性,通過MATLAB/Simulink仿真研究了4種速度控制器分別在不同情況下的控制性能:
(1) 在空載啟動(dòng)時(shí),模糊控制和Anti-Windup PI控響應(yīng)快,并且無超調(diào),普通PI比其它控制器響應(yīng)較慢并且有較大的超調(diào),但是其控制結(jié)構(gòu)簡單。
(2) 在突加負(fù)載擾動(dòng)時(shí),模糊自適應(yīng)PI有較快的響應(yīng),但是在調(diào)節(jié)過程中有振蕩。Anti-Windup PI控制對抗負(fù)載擾動(dòng)也比較快而且調(diào)節(jié)過程比較平穩(wěn)。因此綜合來說Anti-Windup PI控制有較好的抗負(fù)載擾動(dòng)能力。
(3) 對于電網(wǎng)電壓擾動(dòng),模糊控制有較好的控制效果,而模糊自適應(yīng)PI控制相比速度變化大,而且經(jīng)過比較長的時(shí)間達(dá)到穩(wěn)定。
[1] 繆仲翠,黨建武,張鑫,等.PSO優(yōu)化分?jǐn)?shù)階PIλ控制的雙閉環(huán)直流調(diào)速控制[J].計(jì)算機(jī)工程與應(yīng)用,2015,51(7):252-257.
[2] 楊祖元,楊華芬.雙閉環(huán)直流調(diào)速系統(tǒng)模糊PID控制研究[J].計(jì)算機(jī)應(yīng)用研究,2011,28(3):921-923.
[3] 王亮,孫守娟.基于模糊控制的雙閉環(huán)系統(tǒng)及仿真分析[J].制造業(yè)自動(dòng)化,2013,35(5):51-53.
[4] 朱益江.自調(diào)整PI參數(shù)的直流調(diào)速系統(tǒng)研究及仿真[J].連云港職業(yè)技術(shù)學(xué)院學(xué)報(bào),2006,19(4):4-6.
[5] ARULMOZHIYAL R,KANDIBANV R.Design of fuzzy PID controller for brushless DC motor[C]//IEEE International Conference on Computer Communication and Informatics,Coimbatore,2012.
[6] ABIDIN M F Z,ISHAK D,HASNI ABU HASSAN A.A comparative study of pi,fuzzy and hybrid pi fuzzy controller for speed control of brushless DC motor drive[C]//IEEE International conference on Computer applications and and Industrial electronics,Malysia,2011.
[7] CHOI J,PARK C W,RHYU S,et al.Development and control of bldc motor using fuzzy models[C]//IEEE international Conference on Robotics,Automation and Mechatronics,Chengdu,2004.
[8] Anirban Ghoshal and Vinod John.Anti-windup schemes for proportional integral and proportional resonant controller[C]//National Power electronic conference,Roorkee,2010.
[9] BOHN C,ATHERTON D P.An analysis package comparing PID anti-windup strategies[J].IEEE Transactions on controls system,1995,15(2):34-40.
[10] 陳伯時(shí).電力拖動(dòng)自動(dòng)控制系統(tǒng)[M].北京:機(jī)械工業(yè)出版社,2009:1-2.
[11] 張興華,姚丹.感應(yīng)電機(jī)直接轉(zhuǎn)矩控制系統(tǒng)的"抗飽和"控制器設(shè)計(jì)[J].電工技術(shù)學(xué)報(bào),2014,29(5):181-188.
[12] 劉金琨.先進(jìn)PID控制MATLAB仿真[M].北京:電子工業(yè)出版社,2011:255-256.
ComparativeStudyonDoubleClosedLoopDCMotorSpeedControlBasedonDifferentControlLaws
ZHANGHai-ming,TUOXing-wa
(Lanzhou Jiaotong University, Lanzhou 730070,China)
Double closed loop DC speed regulating system has been widely used in the industrial control field. In view of the above phenomenon, the speed regulator's control performance of double closed loop DC speed regulating system was mainly studied. By applying methods of ordinary PI, fuzzy adaptive PI, anti-windup PI and fuzzy control based on the MATLAB/Simulink simulation experiment, characteristics of control performances of DC motor during start-up, anti-load, anti-grid and anti-voltage disturbances based on different control laws were analyzed and compared.
DC motor; fuzzy control; fuzzy adaptive PI control; anti-windup control
2016-05-20
國家自然科學(xué)基金項(xiàng)目(61461023);甘肅省自然科學(xué)基金項(xiàng)目(1310RJZA037)
TM33
:A
:1004-7018(2016)11-0070-03
張海明(1963-),男,高級工程師,主要研究方向?yàn)闄z測及自動(dòng)化。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟(jì)·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32