自適應組合偏置推力分配算法*
2016-08-29 04:35:38徐海祥
武漢理工大學學報(交通科學與工程版) 2016年4期
徐海祥 文 武 馮 輝
(高性能船舶技術教育部重點實驗室1) 武漢 430063) (武漢理工大學交通學院2) 武漢 430063)
?
自適應組合偏置推力分配算法*
徐海祥1,2)文武2)馮輝1)
(高性能船舶技術教育部重點實驗室1)武漢430063)(武漢理工大學交通學院2)武漢430063)
針對動力定位船舶處于控制力要求為零、環境力較小而方向頻繁變化,以及要求高于定位能力實際所需功耗等特殊工況時,提出了一種新的自適應組合偏置策略來解決推力分配的問題.該算法能夠在不影響推進系統最大能力的基礎上,通過自適應調整偏置量避免全回轉推進器發出零推力,保證推進器的角度變化平穩,降低推進器的磨損,提高船舶對環境變化的響應能力.仿真結果表明,該算法能有效地解決上述特殊工況下的推力分配問題.
動力定位;推力分配;特殊工況;組合偏置
0 引 言
動力定位推力分配系統的主要任務是根據控制力的需要給各推進器發出合適的推力和方位角指令以抵抗外界載荷的干擾,使得船舶達到預定位置.推力分配問題本質上是一個非線性最優化問題,目前已發展了多種求解推力優化分配問題的算法[1-4].
在實際定位過程中,可能需要控制力為零,而為了時刻保證船舶的操縱性,不允許推進器停止轉動;當環境力較小而方向變化頻繁時,推進器的方位角也需要頻繁的大角度變化來滿足推力需求,從而影響船舶定位的精度,以及定位過程中船舶的操縱性能,同時也會加快螺旋槳磨損.此外,當功率管理系統要求推進系統發出的功耗高于實際所需的功率時,也需要推進器發出額外的推力作為功率儲備,而且不能影響定位的效果.針對上述問題,Kongsberg[5]提出了偏置的概念,通過對推進器進行分組,允許全回轉推進器之間或組與組之間相互抵消推力.Veksler[6]介紹了通過組合偏置策略來避免由于負載的劇烈變化而導致動力系統功率的階躍變化.國內學者郭峰[7]用偏置算法解決特殊海況下的推力分配問題,但是未說明如何確定偏置量的大小.施小成等[8]針對組合偏置算法提出了一種組合偏置策略,但是該方法在環境力較小時,由于偏置量的固定不變會導致能量的浪費.
為了解決現有偏置算法在環境力較小時,由于偏置量不能自適應變化而導致能量浪費的問題,本文以一艘動力定位船舶模型為研究對象,基于能量最優的原則,提出一種新的自適應組合偏置算法,該算法能夠自適應地調整偏置量的大小,以適應不同的工況,并保證推進系統的最大能力不受影響.
1 三自由度下推力分配數學模型
1.1目標函數和約束條件
動力定位船舶工作要求不同,其優化目標函數的選取也不同.本文以船舶的能耗最小和推力偏差最小為目標,則目標函數可以表示為
(1)
式中:n為推進器的個數;Ti為第i個推進器的推力大小;s為松弛變量;Q為權值矩陣.
考慮推進器的物理限制,主要包括各推進器的最大推力限制、推力變化率限制,以及全回轉推進器角度變化率限制,則約束條件可表示為
(2)
式中:τ=(τX,τY,τN)∈R3為控制器發出的合力及合力矩指令;α=[α1,α2,…,αn]T為各推進器的推力方位角;Tmin和Tmax分別為全回轉推進器推力的最小限制和最大限制;ΔTmin和ΔTmax分別為推力變化率的最小限制和最大限制;Δαmin和Δαmax分別為角度變化率的最小限制和最大限制;B(α)為推進器的配置矩陣,可表示為
(3)
式中:( lxi,lyi)為第i個推進器的位置坐標.
1.2基于擴展推力的優化分配
為了避免復雜的非線性問題,S?rdalen引入了擴展推力概念,將全回轉推進器的推力分解為X方向和Y方向的2個正交力,則推進器的配置矩陣可以表示為
(4)
則推力分配方程表示為
(5)
式中:Te=[T1,x,T1,y,…,Tn,x,,Tn,y]表示各推進器在X方向和Y方向的推力.
以推力的最小平方為目標函數和推力分配方程為約束條件構造拉格朗日函數:
(6)
式中:λ為拉格朗日乘子向量;W為各推力的權值系數,應用拉格朗乘子法可以得到該優化問題的廣義逆解.
(7)
推進器的最優角度和推力大小可表示為
(8)
2 自適應組合偏置算法
組合偏置是指對全回轉推進器進行分組,通過推力優化算法計算得到各推進器的最優推力,然后給組內的推進器施加額外的推力,即允許全回轉推進器之間或組與組之間相互抵消推力,各個組可以包含2~3個推進器,其中推力相互抵消的量稱為偏置量Δ,增加的偏置量必需滿足:B(α)Δ=0.
自適應組合偏置算法可以有效地解決推進器無法輸出零推力的問題,減小全回轉推進器的角度變化幅度,提高船舶的動態性能,而且可以將抵消的偏置量作為功率儲備來滿足高于實際定位需求的能耗,同時避免動力系統功率的階躍變化.此外,該算法還可以通過自適應調整偏置量的大小來保證整個推進系統的最大能力不受影響.
2.1自適應偏置量的確定
考慮動力定位船舶2個相鄰推進器所構成的組合,其推進器布置見圖1,2個推進器的最大推力分別為Tmax1和Tmax2,f1和f2分別表示1號推進器和2號推進器由推力優化算法計算得到的推力,T1和T2分別表示1號推進器和2號推進器偏置后的推力.
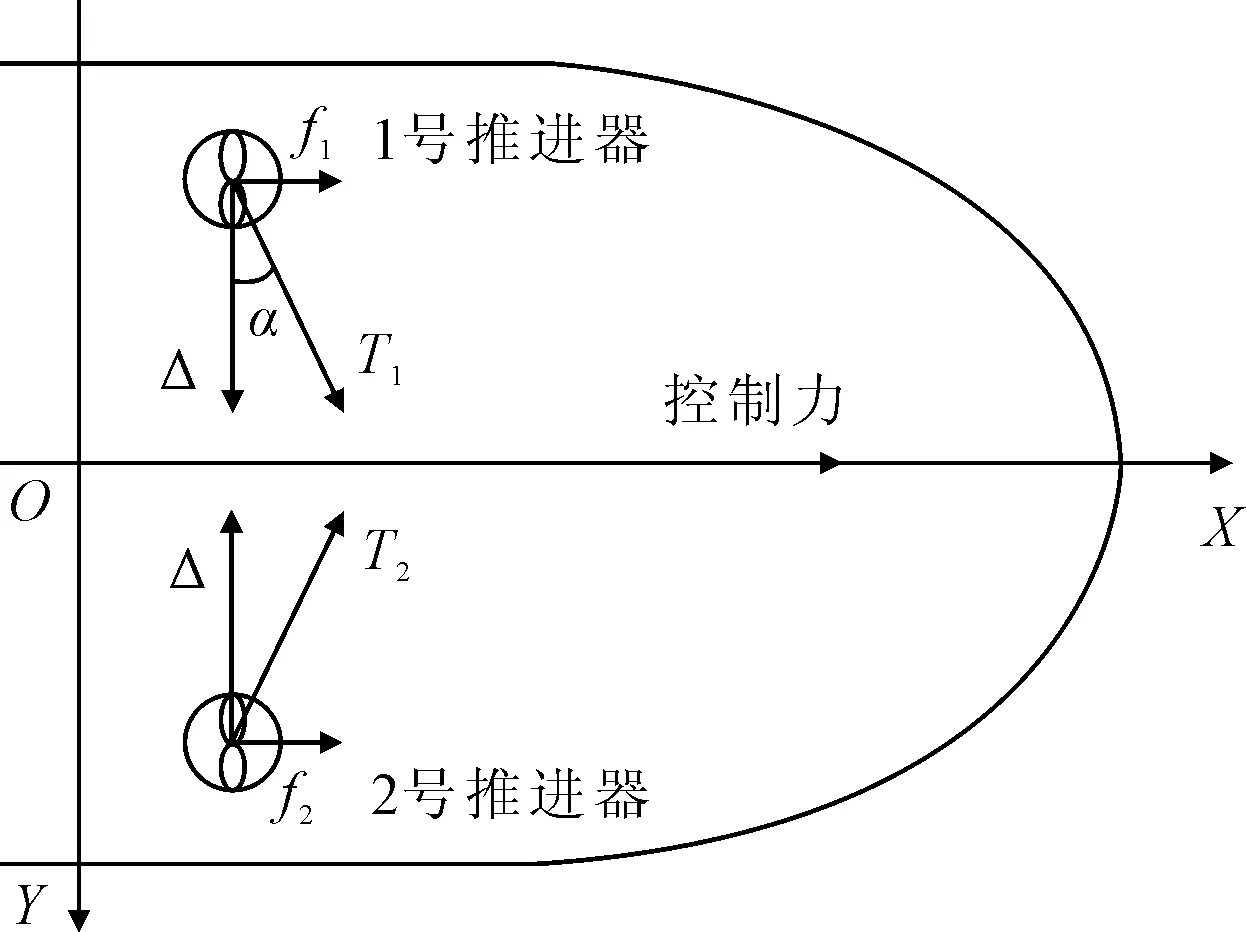
圖1 推進器布置圖
文獻[8]提出的一種自適應偏置量設計方法,其偏置量可由下式確定.
(9)
式中:μ為固定偏置量的系數.為了提高算法的魯棒性和自適應性,其引入了自適應偏置因子σ.
(10)
式中:k為相應的采樣周期;β1和β2為閾值,且有0≤β1<β2≤1.
則自適應偏置量可以表示為:
(11)
上述自適應偏置算法在推力滿足β1≤Tk/Tmax≤β2時,能夠實現偏置量的自適應變化,但是當動力定位船舶作業于環境力較小的海況,通過推力優化算法計算得到的推力滿足Tk/Tmax≤β1時,采用上述自適應偏置算法得到的偏置量是固定不變的,將導致引入的偏置量過大而造成能量的浪費.
針對上述自適應組合偏置算法存在的問題,本文提出了一種新的自適應組合偏置算法,其偏置量主要是由兩部分組成的,一部分是固定的偏置量Δ1,另外一部分是隨推力而實時變化的偏置量Δ2,其中固定偏置量Δ1可由式(9)確定.
為了根據推力的變化實時調整偏置量的大小引入角系數ε(0<ε<1),它表示在滿足推力需求時角度相對于推力的優先權.角系數越大,則滿足相同推力變化的情況下,推進器所需改變的角度越小.在定位作業中,操縱人員可以根據調整角系數的大小來適應不同海況和工況的需求.此外,為了保證推進系統的最大能力不受影響,引入旋轉系數δ(0<δ<1),它是決定一個推進系統何時取消偏置以保證船舶的最大能力不受影響.隨推力變化的偏置量Δ2可表示為
(12)
式中:α為推進器的方位角.則在第k個采樣周期時的自適應偏置量可表示為
以圖1中的船舶模型為對象進行仿真分析,假定Tmax1=Tmax2=10 N,為了更好的反映角系數對偏置量的影響,取固定偏置量Δ1=0,旋轉系數δ=0.8,分別取角系數ε=0.3,0.5,0.7,0.9.由圖2~3可知,在相同角系數時,偏置量隨著推力的增加而先增大后減小,從而可以解決了在環境力較小的情況下偏置量過大的問題.當增加的偏置量使得推力與最大推力的比值大于δ時,則通過取消偏置以保證推進器的最大能力.此外,隨著角系數的增加,在相同推力的情況下,額外增加的偏置量也越大,因此在實際工程中可以通過選擇合適的角系數來滿足不同工況下的定位要求.
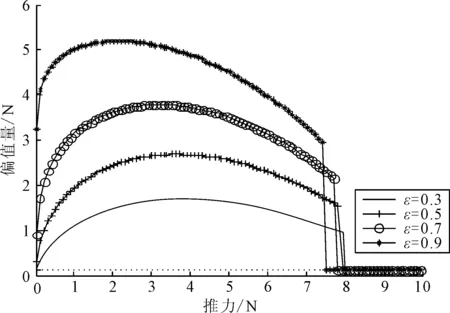
圖2 偏置量隨角系數變化
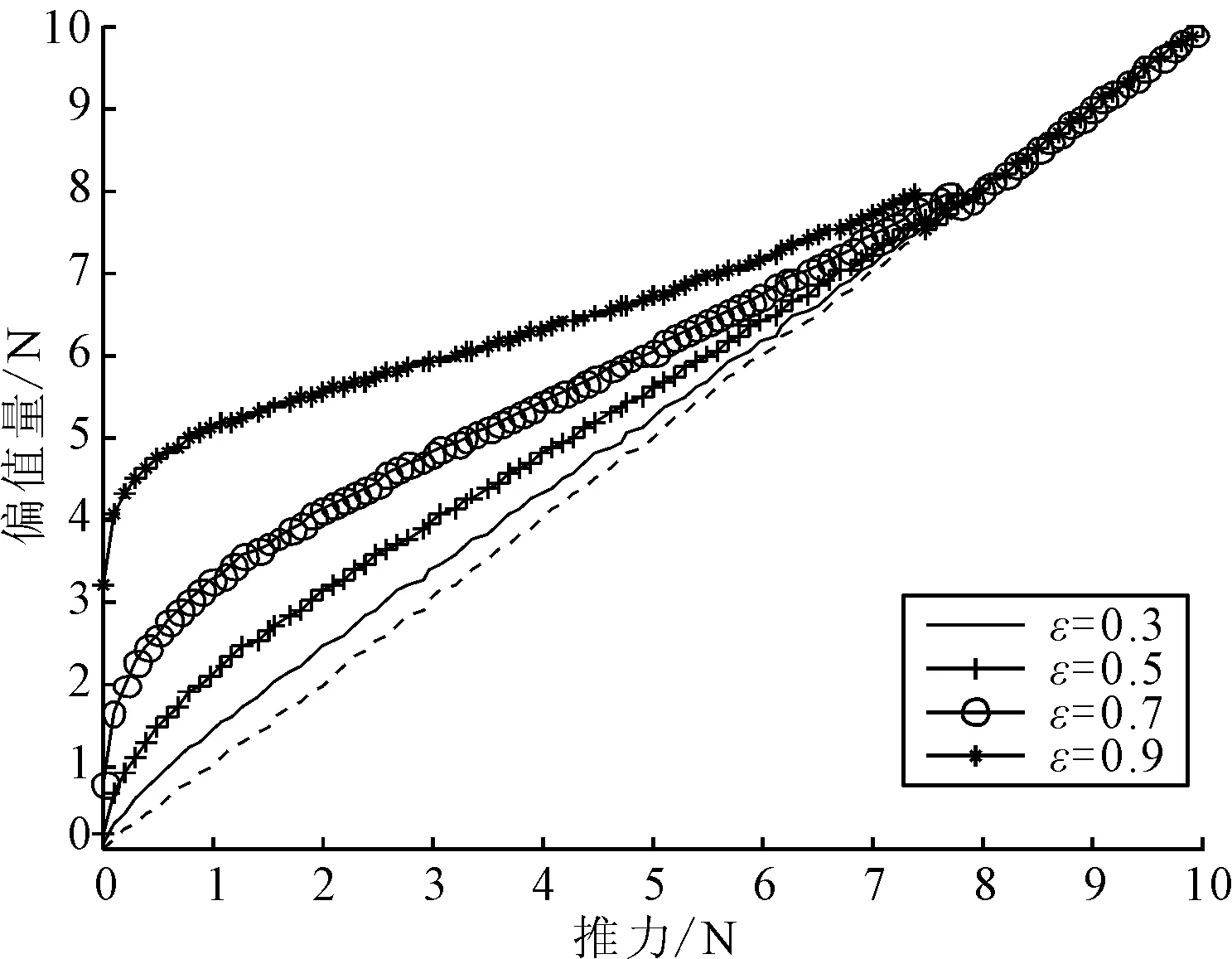
圖3 偏置后推力隨角系數變化
偏置組內由于各推進器推力不同,其偏置量也會不同,因此需要選擇一個合適的偏置量,使偏置后組內推進器推力都能滿足Tmin≤T≤δTmax,若組內由各推進器的推力計算得到的偏置量都能夠滿足上述限制條件,應該基于能耗最小原則,選擇滿足條件的最小偏置量.
2.2自適應組合偏置推力分配算法流程
對于裝備有全回轉推進器DP船舶,加入偏置算法后的流程為:(1)采用基于擴展推力的偽逆法求解能量最優的推力分配問題,得到各推進器的推力和角度;(2)將全回轉推進器分成不同等級的組;(3)根據實際情況,選擇合適的角系數,確定增加的偏置量;(4)根據自適應組合偏置算法計算偏置后各推進器的角度和推力的大小.自適應組合偏置算法的流程圖見圖4:
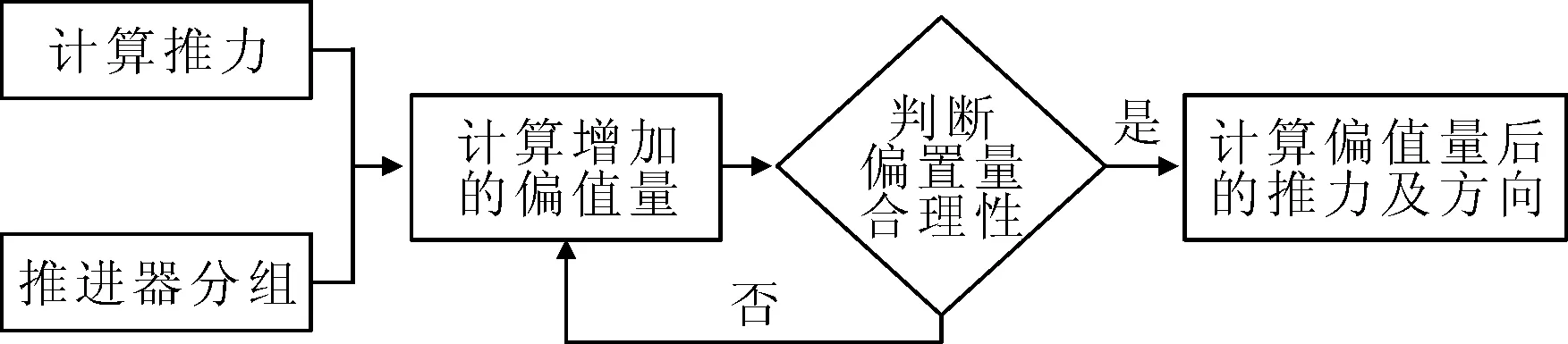
圖4 自適應組合偏置算法流程圖
3 仿真結果與分析
為了驗證本文提出的自適應組合偏置推力分配算法的有效性,并與未采用偏置算法時和文獻[8]提出的組合偏置算法對比,以一艘動力定位船舶模型為對象進行仿真分析,該船的推進器的布置見圖5,其中1號,2號,3號,4號為全回轉推進器,5號和6號為可正反轉的槽道推進器.推進器的相關的技術參數見表1.
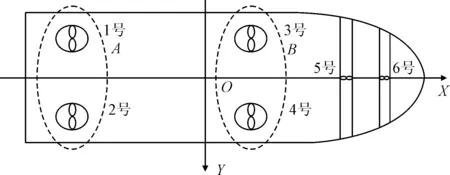
圖5 推進器布置圖
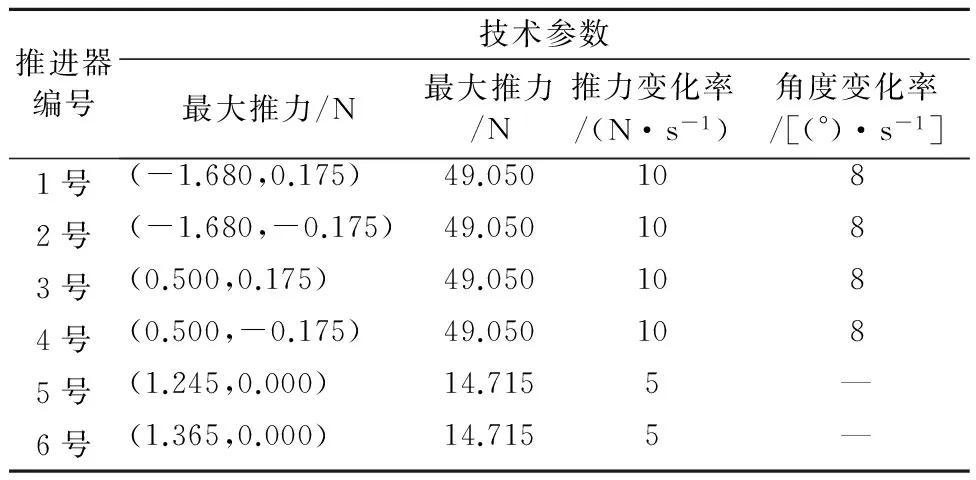
表1 推進器技術參數
仿真中假定船舶處于環境力較小而方向頻繁變化的海洋環境中作業,待分配控制力和力矩見圖6.將推進器1和推進器2組成推進器組A,推進器3和推進器4組成推進器組B,并對其進行組內偏置,然后將A組和B組之間設置組間偏置.仿真中,文獻[8]偏置算法的相關參數分別取為:u=0.3,β1=0.5,β2=0.8.本文推薦方法得相關參數分別取為:u=0.05,ε=0.7,δ=0.8.
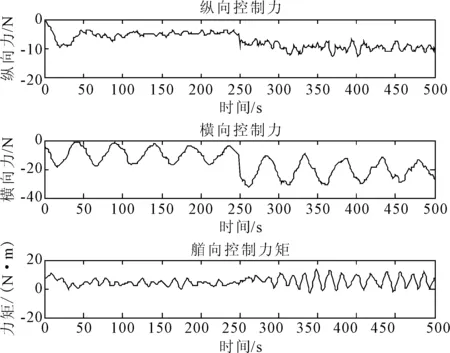
圖6 待分配的控制力和力矩
圖7表示1號推進器的推力大小和方位角的變化,圖8表示2號推進器的推力大小和方位角的變化,圖9表示推進系統的能耗變化.由圖7~8可知,采用偽逆推力分配算法計算得到的推進器方位角變化幅度較大,而采用兩種偏置算法后,1號推進器和2號推進器的角度變化都分別都在45°~55°和-65°~-45°之間,各推進器方位角變化幅度相對于偏置前都減小,從而可以降低推進器的磨損,并且避免推進器排出尾流之間的相互干擾.由圖9可知,在推進器角度變化幅度相近的情況下,本文提出的自適應偏置算法與文獻[8]提出的偏置算法相比,偏置后推進系統的能耗會大幅度降低.這是因為在外環境力較小的海況下,由于要求發出的推力較小,文獻[8]提出的組合偏置算法計算得到的偏置量是固定值,導致引入的偏置量過大而增加了推進系統的能耗.此外,當控制器要求發出的合力為零時,由于偏置量的存在,可以有效的避免全回轉推進器發出零推力,提高船舶的動態響應能力.
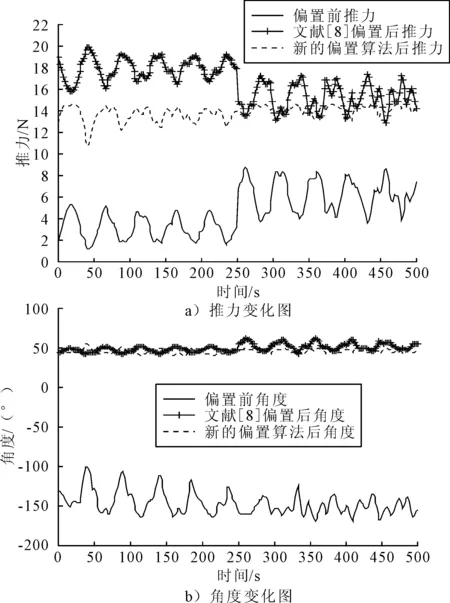
圖7 3種算法下1號推進器推力和角度的變化
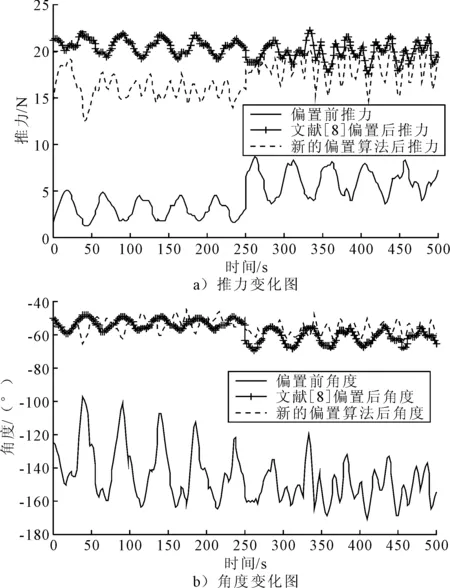
圖8 3種算法下2號推進器推力和角度的變化
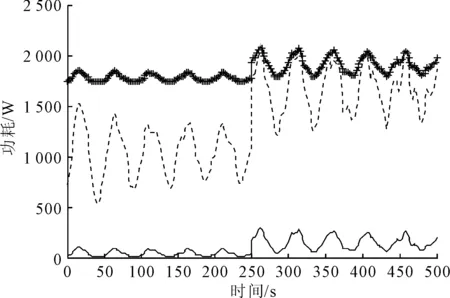
圖9 3種算法推進系統能耗的變化
4 結 束 語
文中以一艘動力定位船舶為仿真對象,針對在特殊海況和工況下存在的推力分配問題,設計了一種新的自適應組合的偏置策略,并分析了角系數對偏置量大小的影響規律.仿真結果表明該算法能夠通過自適應調整偏置的大小,有效降低了組合偏置算法后推進系統的能耗,降低推進器的磨損,避免推進器之間的干擾,提高船舶的動態響應能力.
[1]FOSSEN T I, JOHANSEN T A. A survey of control allocation methods for ships and underwater vehicles[C]. 14th IEEE Mediterranean Conference on Control and Automation, Ancona,2006:1-6.
[2]王芳.驅動水面航行器的控制分配技術研究[D].哈爾濱:哈爾濱工程大學,2012.
[3]ZHOU X, XU H X. Optimal constrained thrust allocation for ship dynamic positioning system under changeable environments[C]. The Twenty-fifth International Offshore and Polar Engineering Conference,2015:275-282.
[4]MARTIN R. Fuel optimal thrust allocation in dynamic positioning[D]. Norway:Norwegian University of Science and Technology,2013.
[5]KONGSBERG M. Product description-kongsberg k-pos dp dynamic positioning system[M]. Nautic Expo,2006.
[6]VEKSLER A, JOHANSEN T A. Thrust allocation with power management functionality on dynamically positioned vessels[C].2012 American Control Conference,2012:1469-1475.
[7]郭峰.鋪管起重船動力定位系統推力分配方法研究[D].哈爾濱:哈爾濱工程大學,2011.
[8]施小成,魏玉石,寧繼鵬,等.基于能量最優的組合偏置推力分配算法研究[J].中國造船,2012,53(2):96-103.
Adaptive Group Biasing Thrust Allocation Algorithm
XU Haixiang1,2)WEN Wu2)FENG Hui1)
(KeyLaboratoryofHighPerformanceShipTechnologyofMinistryofEducation,Wuhan430063,China)1)(SchoolofTransportation,WuhanUniversityofTechnology,Wuhan430063,China)2)
In order to solve the problem of thrust allocation when dynamic positioning vessels work in special conditions, such as small environment forces with frequent changes of direction, control force demand being zero and higher power consumption than that of the positioning capacity, a new adaptive group biasing strategy is proposed in this paper. On the basis of without affecting the maximum capacity of the propulsion system, this algorithm can avoid propeller giving zero force, make the angle of thruster change smoothly, reduce the wear of propellers, and improve the response ability of the vessels towards the environment variation, through adjusting the biasing adaptively. The simulation results show that the algorithm can effectively solve the thrust allocation problem in special conditions.
dynamic positioning; thrust allocation; special conditions; group biasing
2016-04-28
U664.82
10.3963/j.issn.2095-3844.2016.04.001
徐海祥(1975- ):男,博士,教授,博士生導師,主要研究領域為船舶動力定位系統開發
*國家自然科學基金項目資助(61301279,51479158)
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
艦船科學技術(2022年13期)2022-08-11 09:30:02
艦船科學技術(2022年2期)2022-03-29 01:12:44
鐵道通信信號(2020年9期)2020-02-06 09:15:22
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
數學大王·趣味邏輯(2019年5期)2019-06-13 20:27:43
小學科學(學生版)(2019年5期)2019-05-21 01:00:18
經濟技術協作信息(2018年30期)2018-11-22 06:20:24
中國船檢(2017年3期)2017-05-18 11:33:09