基于無跡卡爾曼濾波的車輛重心高度在線估計*
2016-08-29 04:35:40褚端峰吳超仲胡釗政裴曉飛
武漢理工大學學報(交通科學與工程版) 2016年4期
褚端峰 田 飛 吳超仲 胡釗政 裴曉飛
(武漢理工大學智能交通系統研究中心1) 武漢 430063) (車路協同與安全控制北京市重點實驗室2) 北京 100191) (水路公路交通安全控制與裝備教育部工程研究中心3) 武漢 430063) (武漢理工大學汽車工程學院4) 武漢 430070)
?
基于無跡卡爾曼濾波的車輛重心高度在線估計*
褚端峰1,2,3)田飛1, 3)吳超仲1, 3)胡釗政1, 3)裴曉飛4)
(武漢理工大學智能交通系統研究中心1)武漢430063)(車路協同與安全控制北京市重點實驗室2)北京100191)(水路公路交通安全控制與裝備教育部工程研究中心3)武漢430063)(武漢理工大學汽車工程學院4)武漢430070)
重型貨車的載重變化會引起重心高度發生明顯漂移,而準確、及時地獲取車輛重心高度,對于車輛主動安全系統至關重要.文中基于無跡卡爾曼濾波方法,結合車輛三自由度動力學模型,通過傳感器采集車速、前后輪速等,實現對車輛重心高度的在線估計.通過TruckSim與MATLAB/Simulink的聯合仿真實驗表明,車輛重心高度的估計結果能在較短時間內逼近真實值,且穩態平均誤差控制在12%以內,對車輛主動安全控制具有重要意義.
重心高度;參數估計;無跡卡爾曼濾波;車輛動力學
對于重型貨車而言,載重變化會對整車質量產生顯著影響,進而也會導致車輛重心位置發生明顯漂移[1].車輛重心位置對于車輛主動安全有著較大影響,若無法實時獲取這些信息,必將影響車輛主動安全預警及控制的有效性[2].傳統的車輛重心高度測量方法主要通過對車輛進行傾斜、偏轉等操作,從而測量車輛相關部件的尺寸、受力等,并運用靜力學方法求解重心高度[3].該方法可較準確地獲得車輛靜態時的重心高度值,但其測量過程決定了這種方法無法應用到正在運行、且載重變化較大的車輛中,從而也就無法進行重心高度的在線測量.因此,對于車輛運行過程中的重心高度獲取,須借助傳感器測量或參數估計的方法.
目前,在汽車主動安全領域,車輛參數的在線獲取方法主要分為三類[4].一是利用低成本的車載傳感器對測量信號進行數學推算,以獲取車輛參數或運動狀態,這種測量方法的特點是成本低,但由于低成本的傳感器精度較低,從而存在較大的測量誤差,容易降低測量效果[5];二是利用高精度傳感器對車輛運行狀態進行直接測量(如高精度的定位系統等),此方法雖可取得較高的測量精度,但價格昂貴,無法進行大范圍的推廣應用[6];第三種方法是模型法,即通過車輛動力學建模及分析,同時將低成本車載傳感器采集信息作為觀測量,進而利用適當的濾波估計算法實現對車輛參數或運動狀態的在線估計.模型法可實現對難以直接測量的參數或運動狀態進行估計,且成本一般較低.Huang等[7-8]在車輛質量與軸距、重心縱向位置等結構參數可知的情況下,分別利用線性卡爾曼濾波、自適應擴展卡爾曼濾波方法,對車輛重心高度進行了在線估計,取得了一定的實驗效果.Rajamani等[9]通過采集車輛側傾角速度、側傾角度等動態信息,并在精確的側傾動力學模型基礎上,利用帶有可變遺忘因子的遞推最小二乘法,實現對車輛重心高度的在線估計.Hong等[10]利用雙卡爾曼濾波,在四輪非線性車輛動力學模型的基礎上實現對車輛重心位置、簧載質量、橫擺轉動慣量等結構參數的在線估計.Yue等[11]考慮車輛制動時的重心高度變化,利用平板式汽車制動實驗臺,通過采集車輛制動時的軸荷與制動力來實時估計重心高度.
文中在考慮車輛縱向、前后輪旋轉等三自由度動力學模型基礎上,建立基于無跡卡爾曼濾波(unscented Kalman filter, UKF)的車輛重心高度在線估計方法.該方法采用線性的車輛動力學模型,簡化了在線估計算法的運算量.同時,只需通過傳感采集車輛運動過程中的車速、前后輪速等,即可通過無跡卡爾曼濾波方法實現對車輛重心高度的在線估計.
1 車輛三自由度動力學模型
構建車輛三自由度動力學模型,見圖1.包括車輛的縱向運動、前后輪旋轉運動,具體如下
(1)
(2)
(3)式中:m為整車質量;vx為縱向速度;Fxf,Fxr分別為車輛前后輪的縱向力;Fa為空氣阻力;g為重力加速度;φ為道路縱坡;J為車輪轉動慣量;wf,wr分別為前后輪角速度;Tf,Tr為前后輪轉矩;Trf,Trr為前后車輪滾動阻力矩;r為車輪等效半徑,并假設前后車輪半徑相同.
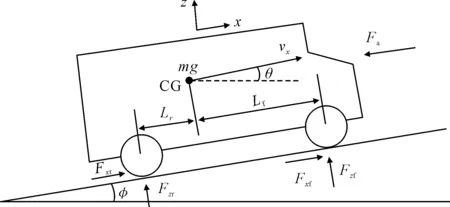
圖1 車輛的三自由度動力學模型
同時,采用線性輪胎模型求解輪胎縱向力
(4)
(5)
式中:wf、wr分別為前后車輪轉動角速度;r為車輪等效半徑.
(6)式中:Ca為空氣阻力系數.
前后車輪滾動阻力矩Trf,Trr的計算公式如下
(7)式中:γ為輪胎滾動阻力系數.
在存在道路縱坡的情況下,車輛前后輪胎的垂向力計算公式如下
(8)
(9)
式中:β為等效加速度.
(10)
式中:az為車輛沿垂向運動的加速度;l為前后軸距,l=lf+lr;ax為縱向加速度;車輛垂向加速度采用如下公式計算
(11)
2 基于無跡卡爾曼濾波的車輛參數估計算法
不同于擴展卡爾曼濾波(extended Kalman filter, EKF),無跡卡爾曼濾波并不對非線性動力學模型進行近似處理,而是對狀態的概率密度函數進行近似處理.該算法以無跡變換(unscented transform)為基礎,采用卡爾曼濾波框架,采樣形式為確定性采樣.無跡卡爾曼濾波的算法流程見圖2.
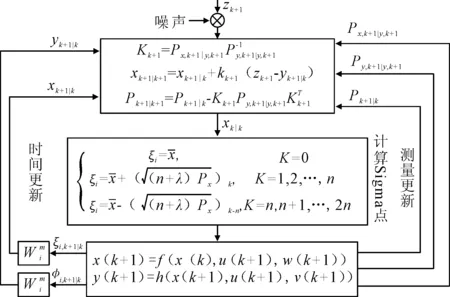
圖2 無跡卡爾曼濾波算法流程圖

(12)

此處,采用對稱采樣策略選取Sigma點.無跡卡爾曼濾波中Sigma點的對稱采樣策略為:設xk的均值為x、方差為Px,則可產生一個L矩陣,該矩陣由2n+1個列向量組成.
為消除采樣的非局部效應,對原始Sigma點集進行比例修正,各個Sigma點的權值為:
式中:Wim為均值的權;Wic為方差的權;λ為調節參數.
(13)
為保證方差矩陣的半正定性,選擇κ=0.參數α表示測試點偏離期望值的程度,通常是一個非常小的正數,即0<α<10-4.β用來描述x的分布信息(高斯分布情況下β=2為最優).
3 仿真驗證
為驗證文中基于無跡卡爾曼濾波方法進行車輛重心高度在線估計的算法準確性,采用TruckSim與MATLAB/Simulink聯合仿真.選取車輛參數見表1.
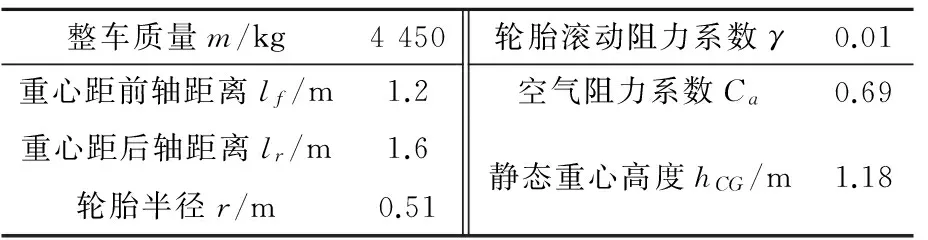
表1 仿真車輛模型部分參數表
3種道路環境參數見表2,車輛在這3種道路上的車速變化均從50 km/h加速至75 km/h,并利用上述算法在線估計車輛重心高度.通過聯合仿真實驗分析,得到如圖3~5所示的車輛輪速、車速的估計值,以及如圖6所示的車輛重心高度估計值.
由圖3~5可知,車速、前輪轉速、后輪轉速的估計值均較快逼近真實值,并穩定在真實值附近.可見,無跡卡爾曼濾波的狀態估計量與觀測量具有較好的一致性,能夠穩定、可靠地實現對系統狀態的觀測.
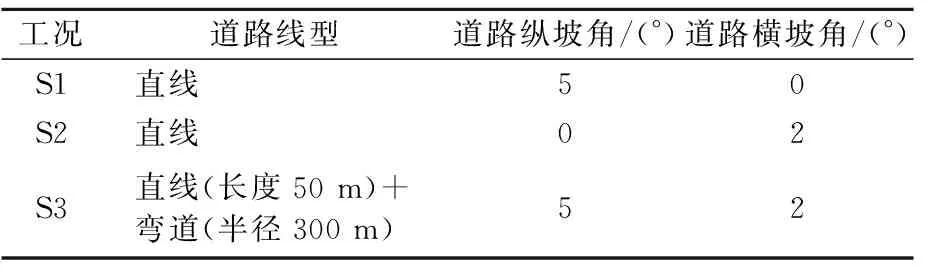
表2 仿真實驗的道路環境

圖3 工況一的實驗結果
由圖6可知,車輛在3種實驗工況下的重心高度估計值雖與真實值(采用車輛靜態時的重心高度值,即1.18 m)之間存在一定誤差,但在經過一段時間后的估計值逐漸平穩,且平均誤差控制在12%以內(見表3~4).

表3 重心高度估計值與真實值的比較(15 s之后)
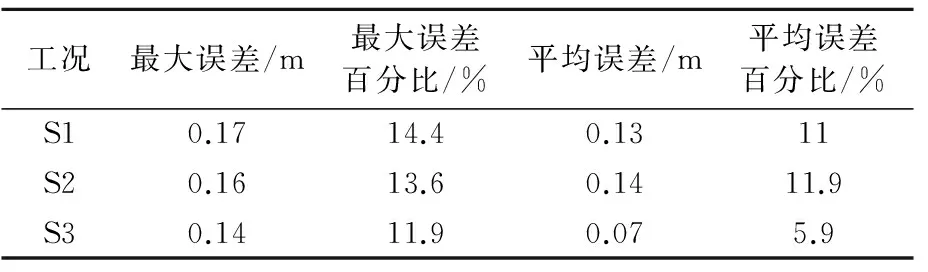
表4 重心高度估計值與真實值的比較(20 s之后)
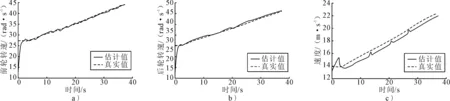
圖4 工況二的實驗結果
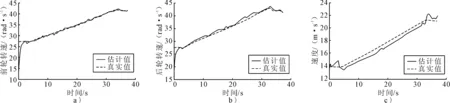
圖5 工況三的實驗結果
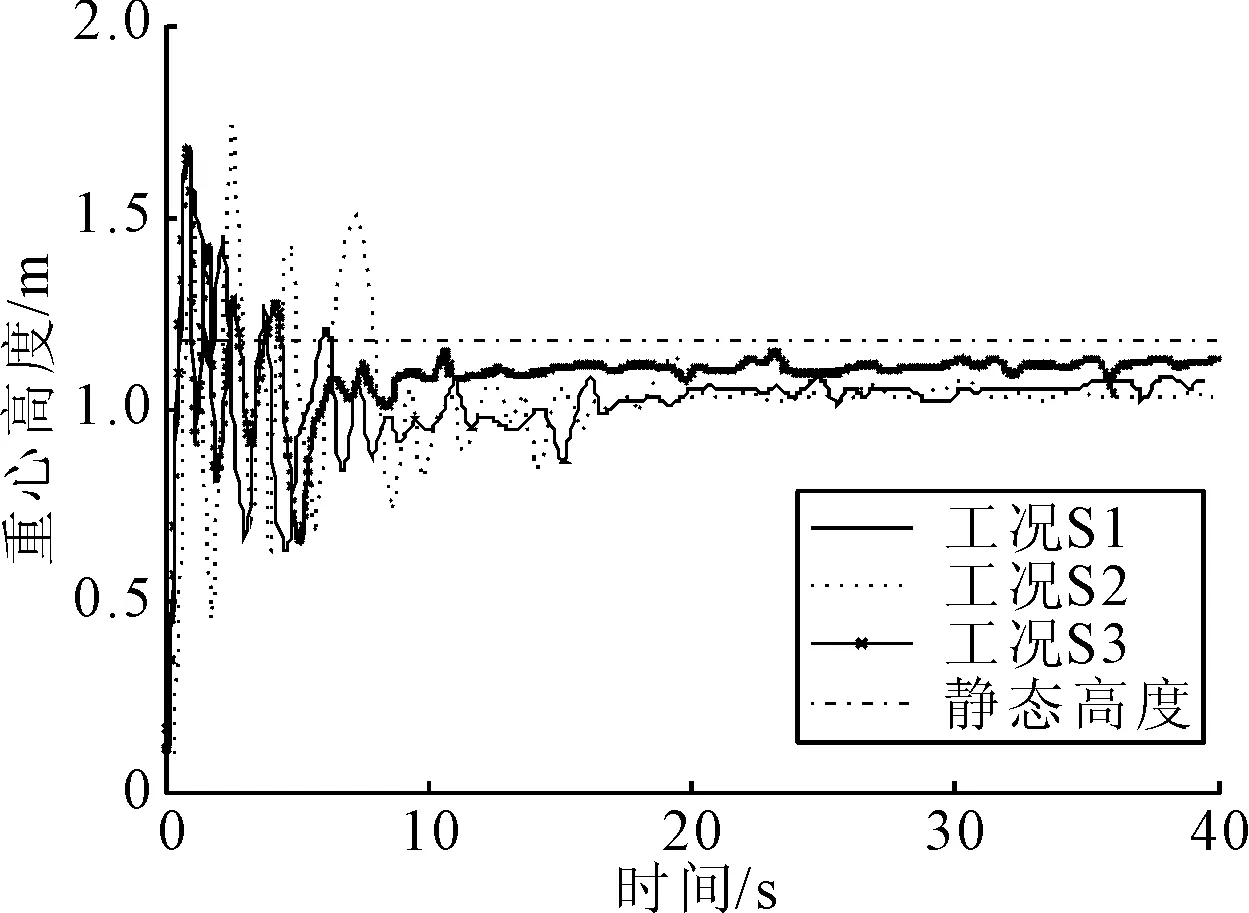
圖6 重心高度估計結果對比
4 結 論
1) 提出了基于三自由度車輛動力學模型的無跡卡爾曼估計算法,能較好地獲取車輛重心高度的真實值,估計值穩定后的平均誤差在12%以內;
2) 利用上述算法估計的車輛重心高度能在較短時間內逼近參數真實值,具有較高的實時性,可滿足對車輛主動預警及控制的要求;
3) 仿真實驗與實際行駛工況仍存在一定差異,后期須通過開展實車實驗,對在線估計算法的有效性進行實車驗證.
[1]BIXEL R A, HEYDINGER G J, DURISEK N J,et al.Developments in vehicle center of gravity and inertial parameter estimation and measurement[J]. SAE Paper No. 950356, 1995.
[2]MANGO N.Measurement and calculation of vehicle center of gravity using portable wheel scales[J]. SAE Paper No.2004-01-1076, 2004.
[3]陳劍雄.汽車重心高度的測定方法[J].汽車技術,1988(7):22-25.
[4]郭洪艷,陳虹,趙海艷,等.汽車行駛狀態參數估計研究現狀與展望[J].控制理論與應用,2013,30(6):661-672.
[5]REZAEIAN A, ZARRINGHALAM R. Cascaded dual extended kalman filter for combined vehicle state estimation and parameter identification[J]. SAE Paper No.2013-01-0691, 2013.
[6]曾學科,陳雨人,王桀.基于ObjectARX的半掛車轉彎檢測系統開發與研究[J].交通信息與安全,2013,31(2):109-113.
[7]HUANG X, WANG J. Center of gravity real-time estimation for lightweight vehicles using tire instant effective radius[J]. Control Engineering Practice, 2013(21):370-380.
[8]HUANG X, WANG J. Real-time estimation of center of gravity position for lightweight vehicles using combined AKF-EKF method[J]. Vehicular Technology, IEEE Transactions on, 2014,63(9):4221-4231.
[9]RAJAMANI R, PIYABONGKARN D, TSOUR APAS V, et al, Parameter and state estimation in vehicle roll dynamics[J]. Intelligent Transportation Systems, IEEE T, 2011,12(4):1558-1567.
[10]HONG S, LEE C, BORRELLI F, et al.A novel approach for vehicle inertial parameter identification using a dual Kalman filter[J]. Intelligent Transportation Systems, IEEE Transactions on, 2015,16(1):151-161.
[11]YUE H, ZHANG L, SHAN H, et al. Estimation of the vehicle's centre of gravity based on a braking model[J]. Vehicle System Dynamics, 2015,53(10):1520-1533.
Online Estimation for Vehicle Center of Gravity Height Based on Unscented Kalman Filter
CHU Duanfeng1,2,3)TIAN Fei1,3)WU Chaozhong1,3)HU Zhaozheng1,3)PEI Xiaofei4)
(IntelligentTransportationSystemsResearchCenter,WuhanUniversityofTechnology,Wuhan430063,China)1)(BeijingKeyLabforCooperativeVehicleInfrastructureSystemsandSafetyControl,Beijing100191,China)2)(EngineeringResearchCenterforTransportationSafety,MinistryofEducation,Wuhan430063,China)3)(SchoolofAutomotiveEngineering,WuhanUniversityofTechnology,Wuhan430070,China)4)
The height of the Center of Gravity (CG) for heavy-duty vehicles will drift apparently when the load changes, while the accurate and real-time recognition of vehicle's CG height is of extremely importance to the vehicle's active safety system. An unscented Kalman filter based on three degree of freedom (3-DOF) vehicle dynamics model is proposed to acquire the real time value of vehicle CG height through sensing the vehicle speed, front and rear wheel speed etc. The results of combined simulation studies based on TruckSim and MATLAB/Simulink show that the estimation algorithm is able to obtain to the true value of CG height in a short time with steady-average error less than 12%. The results are instructive for the dynamic control of driver assistance system.
center of gravity height; parameter estimation; unscented Kalman filter; vehicle dynamics
2016-07-12
U463.33
10.3963/j.issn.2095-3844.2016.04.011
*“十二五”國家科技支撐計劃課題專項經費(2014BAG01B03)、湖北省自然科學基金項目(2015CFB252)、車路協同與安全控制北京市重點實驗室開放基金項目(KFJJ-201401)資助
褚端峰(1983- ):男,工學博士,副研究員,主要研究領域為交通安全
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
測控技術(2018年12期)2018-11-25 09:37:34
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
光學精密工程(2016年6期)2016-11-07 09:07:19
電源技術(2016年9期)2016-02-27 09:05:39
核科學與工程(2015年4期)2015-09-26 11:59:03
電源技術(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36