基于雙目立體視覺的低頻振動測量
2016-09-05 07:19:33舒新煒上海理工大學光電信息與計算機工程學院上海200093
光學儀器 2016年2期
舒新煒,楊 波(上海理工大學光電信息與計算機工程學院,上海 200093)
測試技術(shù)
基于雙目立體視覺的低頻振動測量
舒新煒,楊波
(上海理工大學光電信息與計算機工程學院,上海 200093)
為了滿足物體振動的測量要求,基于雙目立體視覺測量的原理,設計了一套可以在線采集、離線處理的非接觸式低頻振動測量的視覺系統(tǒng)。通過濾波去除噪聲,采用Canny算子和最小二乘法橢圓擬合提取到標志點的輪廓和中心坐標,在已知特征點的空間分布規(guī)律的條件下,通過相應的坐標排序方式,對左右視圖對應特征點進行準確的匹配,獲得了特征點的三維坐標數(shù)據(jù)。最后對比每一幀圖像中對應特征點三維坐標數(shù)據(jù),得到待測物的振動信息。通過直線導軌作為振動源帶動待測物運動的方式進行了測量實驗,實驗結(jié)果顯示,該系統(tǒng)的檢測精度達到±0.15 mm/m以上,基本滿足低頻振動測量的穩(wěn)定可靠、精度高等要求。
雙目立體視覺;振動;非接觸式;離線處理
引 言
振動測量技術(shù)是現(xiàn)代制造業(yè)的關(guān)鍵技術(shù)之一,隨著現(xiàn)代工業(yè)制造水平的發(fā)展,大型結(jié)構(gòu)件和復雜裝備的動態(tài)測試在重大裝備的科學試驗和設計中具有廣泛的應用。在能源領(lǐng)域,風力發(fā)電機大型葉片的振動測試是葉片結(jié)構(gòu)設計驗證的重要環(huán)節(jié),發(fā)電機的整體振動測試能夠有效反映整機的運轉(zhuǎn)狀態(tài)。在汽車領(lǐng)域,發(fā)動機和車身主要結(jié)構(gòu)件的振動測試能夠有效改進車輛的整體舒適性。在航空領(lǐng)域,發(fā)動機葉片設計必須經(jīng)過振動測試。
傳統(tǒng)的振動測量一般為接觸式測量,或者為非接觸式的多普勒式激光測量。接觸式測量安裝過程較復雜,且易對測量結(jié)果造成影響,多普勒式激光測量適用于單點,或者待測區(qū)域較小的情況。對于較大面積、多點的待測對象,上訴兩種方法都不適用。非接觸式測量是指不接觸被測物體的前提下進行精準測量,這種方式具有以下優(yōu)點:(1)排除接觸測量對柔性物體測量的人為受力干擾;(2)可以測量一些不可接觸的物體,如輻射體等;(3)采集速度較快。
目前常用的非接觸式測量方法有激光測量和雙目立體測量等。激光測量的方法利用干涉原理,精度可達到μm級,但是視場較小,不適合于大型被測物。雙目立體視覺三維測量技術(shù)是在計算機視覺的基礎上發(fā)展起來的一項新型非接觸測量技術(shù),它具有測量速度快、測量精度高的顯著優(yōu)點,目前已經(jīng)成為測量方面的研究熱點。全燕鳴等基于雙目視覺對工件尺寸進行了在機三維測量[1],郭俊鋒等通過內(nèi)窺鏡設計了雙目測量系統(tǒng)[2],其系統(tǒng)測量誤差在±0.2 mm。本文在此基礎上提出了一種基于標志點識別振動測量方法,該方法以雙目視覺原理為基礎,在待測物表面貼適當?shù)奶卣鳂酥军c,借用OpenCV開源函數(shù)庫,同時結(jié)合實際應用需求,實現(xiàn)了對振動目標的振動數(shù)據(jù)進行高精度測量的目的。
1 雙目視覺系統(tǒng)
1.1雙目視覺原理
圖1為雙目視覺測量的基本原理[3]。設左攝像機位于世界坐標系原點處,左攝像機坐標系Ol-XlYlZl與世界坐標系O-XYZ重合,左圖像坐標系為OlXlYl,有效焦距為fl;右攝像機坐標系Or-XrYrZr,右圖像坐標系為Or-XrYr,有效焦距為fr。空間標識點中心P(Xw,Yw,Zw)在兩個攝像機像面的像點分別為Pl(ul,vl)、Pr(ur,vr),它們之間滿足式:
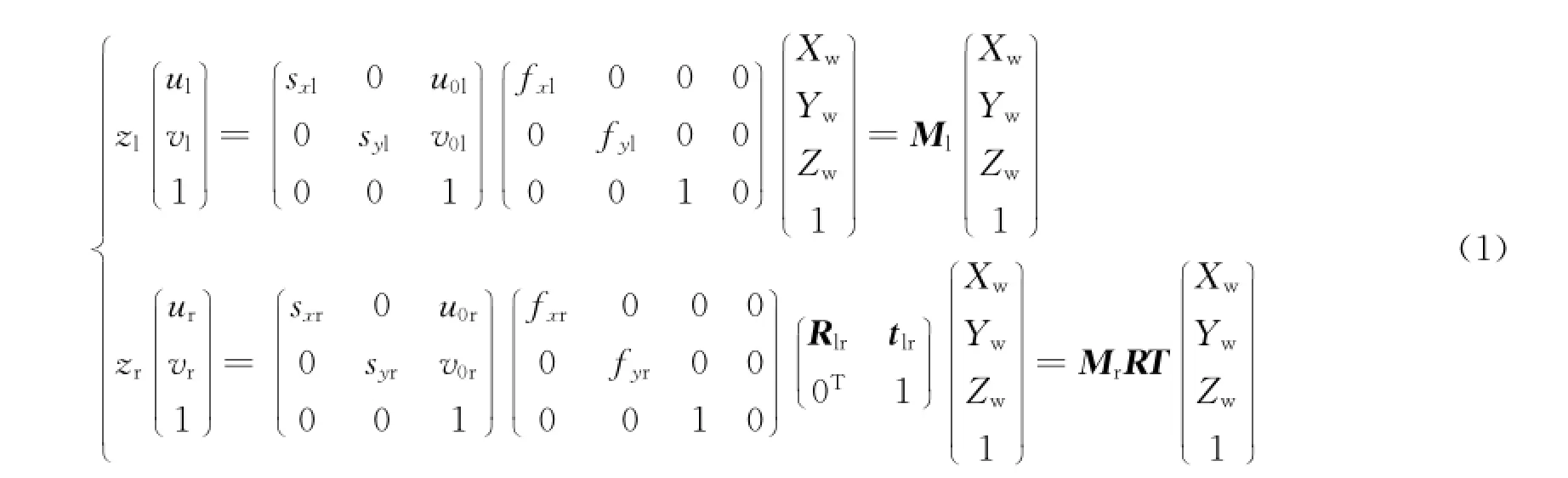
式中:z1和z2為比例系數(shù);sxl和syl分別為左相機圖像水平和垂直的尺度因子;u0l和v0l為左相機像素坐標系下圖像坐標系原點的坐標;fxl和fyl為左相機在X和Y方向上的焦距;sxr和syr分別為右相機圖像水平和垂直的尺度因子;u0r和v0r為右相機像素坐標系下圖像坐標系原點的坐標;fxr和fyr為右相機在X和Y方向上的焦距;Ml和Mr分別為左右相機的內(nèi)部參數(shù);Rlr和tlr為右攝像機坐標系相對于左相機坐標系的旋轉(zhuǎn)矩陣和平移矢量;RT為相機的外部參數(shù)矩陣,由Rlr和tlr組成。在已知Ml、Mr、Rlr、tlr以及P點在左右圖像上位置Pl(ul,vl)、Pr(ur,vr)的條件下,根據(jù)式(1)中的幾何關(guān)系可以確定空間點P的三維坐標[4]。
1.2雙目視覺系統(tǒng)搭建
本文提出的雙目視覺振動測量系統(tǒng)硬件結(jié)構(gòu)主要由工業(yè)相機組、圖像采集端、光源、相機支架、數(shù)據(jù)處理終端組成。雙目視覺測量系統(tǒng)的結(jié)構(gòu)示意圖如圖2所示。由于待測物大小不同,需要相應地調(diào)節(jié)攝像機視場大小,因此兩相機的間距固定為0.8 m,角度為4級可調(diào),4個角度分別為50.3°、62.8°、78.7°、82.4°,共有3組鏡頭,焦距分別為25 mm、75 mm、105 mm,根據(jù)不同的視場范圍選擇合適焦距的鏡頭,待測物距離相機支架中心0.5 m。
測量的流程如圖3所示,根據(jù)待測物的大小,確定對應的相機鏡頭和相機角度后,對雙目視覺系統(tǒng)進行內(nèi)外參數(shù)的標定,獲取相機組的內(nèi)外參數(shù),同步采集圖像,采集完成后循環(huán)讀取采集到的圖像,提取特征點的圖像坐標,并做匹配,計算出該特征點的三維坐標,保存坐標。

圖2 結(jié)構(gòu)示意圖Fig.2 Photo of the system
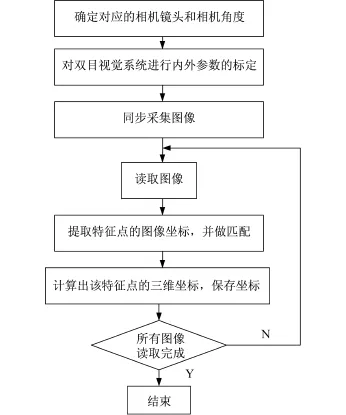
圖3 測量流程Fig.3 Measuring process
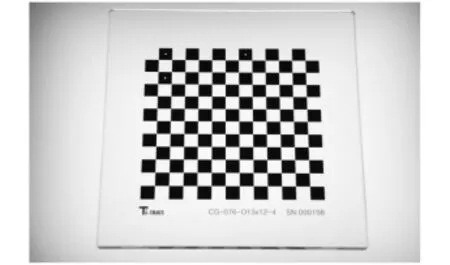
圖4 標定板Fig.4 Calibration plate
2 核心算法
要測量物體的振動,首先在待測物表面粘貼眾多的反光標志點,標志點的空間分布為網(wǎng)格狀,測量每幀圖像各個標志點的三維坐標,對比所有圖像中相應點的三維坐標變化,得到待測物的振動信息。
2.1測量系統(tǒng)標定
理想的相機標定是以針孔模型和透視投影為基礎,但實際中的鏡頭都存在一定的畸變。本文采用考慮畸變的非線性模型作為攝像機標定的幾何模型[5],基于張正友[6]、李洪海等[7]提出的標定算法,使用棋盤格標定板,見圖4。在標定單個相機的基礎上,借用OpenCV的stereoCalibrate[8]函數(shù)對雙目視覺測量系統(tǒng)進行標定。
2.2標志點識別與定位
標志點作為待測物表面上的參考點,測量前先行粘貼于待測物的表面[9]。本文采用的是圓形的反光標志點如圖5(a)所示,該標志點的反光特性為按照入射光的方向反射光線,相機采集到的圖像中,標志點具有較高的對比度,如圖5(b)所示。但實際采集到的圖像會有噪聲,在處理前先進行濾波處理,濾波算子會影響到輪廓提取的精度,不合適的算子會導致錯誤的結(jié)果,經(jīng)過試驗,本文采用3*3的高斯濾波。接著采用Canny算子在圖像中提取標志點的輪廓,通常根據(jù)攝像機成像的原理,圓心標志點的成像會變成橢圓,因此需要對圖像進行橢圓擬合[10],本文采用最小二乘法對邊緣輪廓進行橢圓擬合[11],如圖5(c)所示。由于實際環(huán)境中會有噪聲存在,擬合的橢圓中會有部分為非標志點,而對于特定視場下采集到的標志點的圖像,標志點所占的像素面積,輪廓像素量,圓形度等條件都是在固定范圍內(nèi)的,通過對上訴條件的約束,可達到準確識別標志點的目的,如圖5(d)所示,以每個擬合的橢圓的中心作為該標志點在圖像上的坐標。

圖5 圓形標志點及處理結(jié)果Fig.5 Circular landmark and processing results
2.3標志點的匹配
由于標志點有一定的面積,每行標志點在圖像上的位置都在一定的范圍內(nèi),且與相鄰行區(qū)分較為明顯。因此,本文采用一種較為簡單的空間排序方式。算法流程如圖6所示。經(jīng)過排序后,每個視圖的特征點都能準確匹配。
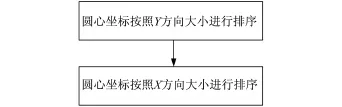
圖6 匹配流程圖Fig.6 Matching process
3 實 驗
為了驗證本文方法的有效性以及精度,以電控直線導軌產(chǎn)生振動來源。實驗所需:兩臺性能參數(shù)完全一樣的Optronis公司的CL-600高速工業(yè)相機,尼康105 mm定焦鏡頭,cameralink圖像采集卡,PI的M112-dg電控導軌,計算機以及相應的圖像處理軟件。
將一塊100*100大小的鋁合金板固定在電動導軌上作為待測物,在待測物表面貼6*7的網(wǎng)格分布的標志點,待測物距離相機固定架的中心約為0.7 m,相機視場范圍對角線約為0.2 m。調(diào)整好相機的角度后,使用棋盤格標定板對相機組進行標定,標定結(jié)果見表1。

表1 標定結(jié)果Tab.1 The result of calibration
在實際標定中,相機夾角以及相機間距由于裝配的原因,實際值與理想值會有一定的偏差。由反投影計算得標定誤差為0.8個像素,標定結(jié)果較為準確。
通過軟件控制電動導軌,以0.1 mm的步距運動,做20次重復試驗,測量系統(tǒng)同步采集圖像,實驗裝置如圖7所示。通過Canny算子檢測邊緣,使用最小二乘法對邊緣輪廓進行橢圓擬合,并去除噪聲點。使用位置排序的方法,對橢圓的中心進行配對,并計算各匹配中心的三維坐標值。計算相鄰兩幅圖中對應點的空間距離,圖8和表2為第1、10、20、30、40點測試結(jié)果與誤差分析。
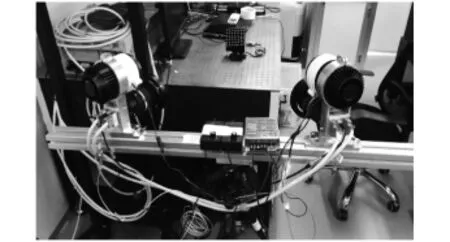
圖7 實驗裝置Fig.7 Experiment setup
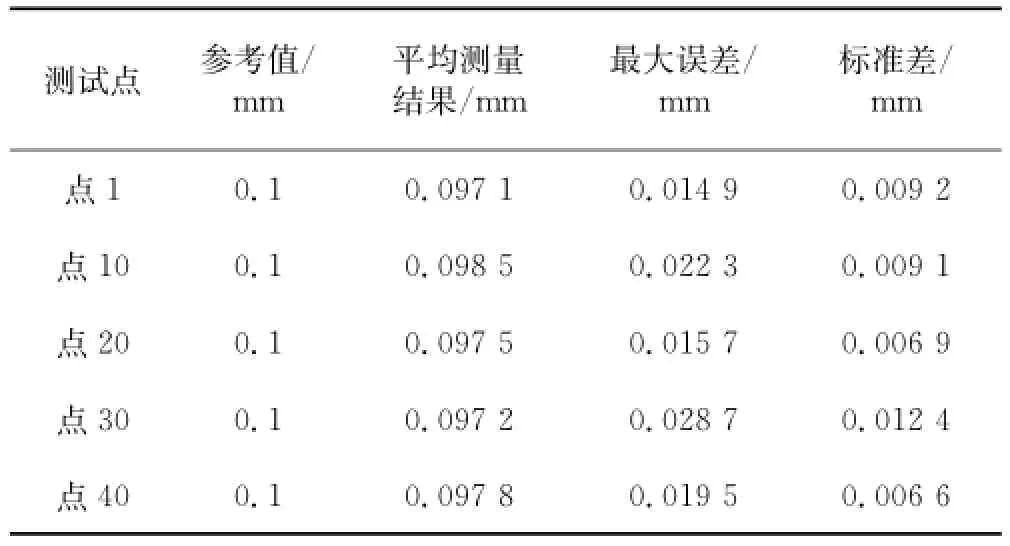
表2 測量結(jié)果Tab.2 Measurement results
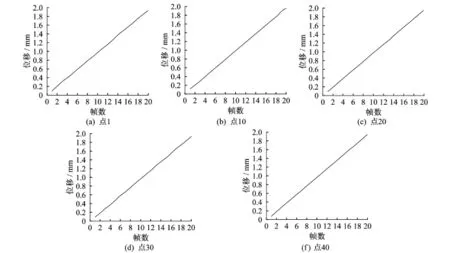
圖8 每點20組數(shù)據(jù)誤差Fig.8 20 groups of data error of every point
從表2和圖8中的數(shù)據(jù)可以看出,在視場范圍約為0.2 m條件下,標志點振動測量結(jié)果與實際值基本一致,數(shù)據(jù)線性度較好,誤差小于0.03 mm,標準差小于0.013 mm,測量精度達到了±0.15 mm/m。
誤差產(chǎn)生的主要原因:
(1)相機標定的誤差,由于相機標定存在誤差,導致三維坐標反算矩陣不十分準確,影響后續(xù)的計算;
(2)圓心提取的誤差,本文的圓心提取精度只到亞像素級,對后續(xù)計算有一定影響。
4 結(jié) 論
本文提出了一種基于雙目視覺的振動測量方法,介紹了雙目視覺測量的構(gòu)成及工作原理,研究了系
統(tǒng)所采用的核心算法,包括相機的標定,標志點的識別、匹配,三維坐標反算等。實驗表明,測量精度達到了±0.15 mm/m,可滿足大多數(shù)振動位移測量的要求。相對于傳統(tǒng)的方法,本文方法還具有可適用于不同的視場范圍,不同待測物,不會對待測物造成影響的優(yōu)點。由于使用高速相機組,系統(tǒng)成本較高,同時對數(shù)據(jù)存儲要求和環(huán)境要求都高,因此還有待進一步的改進。
[1] 全燕鳴,黎淑梅,麥青群.基于雙目視覺的工件尺寸在機三維測量[J].光學精密工程,2013,21(4):1054-1061.
[2] 郭俊鋒,劉鵬,焦國華,等.三維測量工業(yè)內(nèi)窺鏡的雙目光學系統(tǒng)[J].光學精密工程,2014,22(9):2337-2344.
[3] 張廣軍.機器視覺[M].北京:科學出版社,2005.
[4] 馮宇.基于計算機立體視覺的三維重建系統(tǒng)研究[D].青島:青島科技大學,2009.
[5] 王中任.大型工件在機視覺測量關(guān)鍵技術(shù)研究[D].廣州:華南理工大學,2009.
[6] ZHANG Z Y.A flexible new technique for camera calibration[J].IEEE Transactions on pattern Analysis and Machine Intelligence, 2000,22(11):1330-1334.
[7] 李洪海,王敬東.攝像機標定技術(shù)研究[J].光學儀器,2007,29(4):7-12.
[8] BRADSKI G,KAEHLER A.Learning Open CV[M].Nanjing:Southeast University Press,2009.
[9] 劉建偉,梁晉,梁新合,等.大尺寸工業(yè)視覺測量系統(tǒng)[J].光學精密工程,2010,18(1):126-134.
[10] 周艷青,薛河儒,姜新華.一種基于圓形標志點的攝像機標定方法[J].內(nèi)蒙古農(nóng)業(yè)大學學報,2014,35(1):155-159.
[11] 殷永凱,劉曉利,李阿蒙,等.圓形標志點的亞像素定位及其應用[J].紅外與激光工程,2008,37(增刊):47-50.
(編輯:劉鐵英)
The measurement of low frequency vibration based on stereo vision
SHU Xinwei,YANG Bo
(School of Optical-Electrical and Computer Engineering,University of Shanghai for Science and Technology,Shanghai 200093,China)
In order to meet the requirement of vibration measurement,an online collection, offline processing of non-contact visual system of low frequency vibration measuring was designed based on the principle of binocular stereo vision.The filter was used for removing the noise and the Canny operator and the ellipse fitting based on the least squares were used for extracting the both of the contour and center coordinates of the feature points.Furthermore, according to the matching algorithm based on the epipolar constraint and the spatial distribution law of feature points,the 3D coordinate data of the feature points were obtained. Finally,the vibration information of the object was obtained by comparing the 3D coordinate data of the feature points in the each frame image.As a linear guide of the vibration source,an experiment to measure the low frequency vibration shows that the measurement accuracy can reach±0.15 mm/m.And it can satisfy the precision and efficiency demands of the low frequency vibration measuring.
stereo vision;vibration;non-contact;offline processing
TP 39
A
10.3969/j.issn.1005-5630.2016.02.001
1005-5630(2016)02-095-05
2015-07-08
國家重大儀器專項(2013YQ470765)
舒新煒(1991—),男,碩士研究生,主要從事機器視覺方面的研究。E-mail:james951@126.com
楊 波(1977—),男,副研究員,主要從事光學設計、機器視覺方面的研究。E-mail:yangbo@usst.edu.cn
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
艦船科學技術(shù)(2022年8期)2022-06-05 07:36:28
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
中學生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
中國公路(2017年18期)2018-01-23 03:00:38
數(shù)學物理學報(2017年6期)2018-01-22 02:26:40
數(shù)學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21