水電站全數字式微機勵磁系統的通訊規約設計
2016-09-07 02:30:46徐金勇浙江溫州珊溪經濟發展責任有限公司趙山渡水力發電廠浙江溫州325300
水電站機電技術 2016年5期
關鍵詞:系統
徐金勇(浙江溫州珊溪經濟發展責任有限公司 趙山渡水力發電廠,浙江 溫州 325300)
水電站全數字式微機勵磁系統的通訊規約設計
徐金勇
(浙江溫州珊溪經濟發展責任有限公司 趙山渡水力發電廠,浙江 溫州 325300)
針對目前全數字式微機勵磁系統,主要通過通訊規約的設計,包括串行通訊口的設置、通訊協議的設置等,使得水電站全數字式微機勵磁系統能夠與計算機監控系統對接,達到比較好的效果。
通訊協議;勵磁系統;全數字式;水電站
1 引言
勵磁系統與監控系統LCU的接口方式非常靈活,既可以是常規的繼電器接點方式,也可以是通訊方式,還可通過現場總線以組網方式接入監控系統。而且,以上幾種接口方式還可混用。用戶可根據自身的需要選用其中一種或多種接口方式。
2 串行通訊口的設置
勵磁系統與監控系統之間的串行通訊采用Modbus通訊規約。通訊協議支持RTU模式。出廠默認設置如下:
電氣接口規范:RS485(隔離)
站號:1
通訊模式:RTU
波特率:19 200 bit/s
數據位:8位
停止位:1位
校驗位:偶校驗
站號、波特率(最大57 600 bit/s)、停止位、校驗位可根據現場要求更改。
3 通訊協議
3.1讀取勵磁系統狀態
監控系統可通過下述方式讀取勵磁系統的基本信息。
(1)命令格式(表1)

表1
(2)響應格式(表2)

表2
(3)讀數據表(表3)
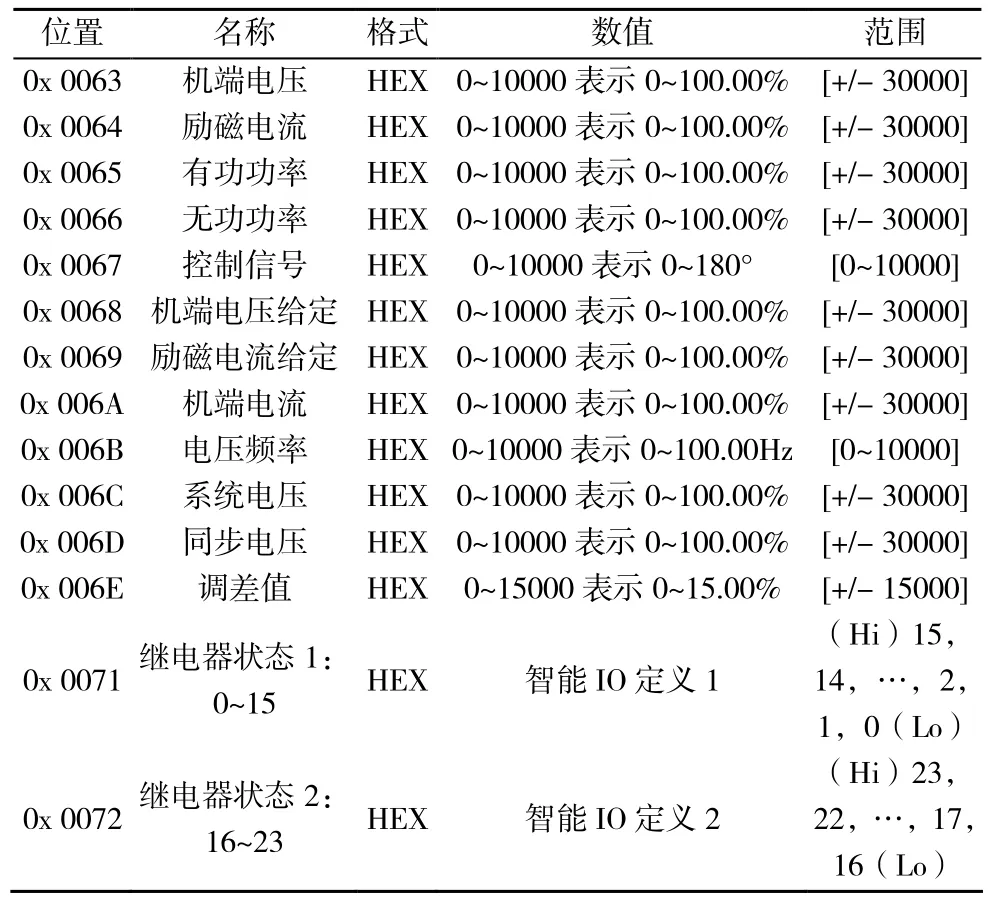
表3
繼電器狀態的定義參見“勵磁系統輸出狀態定義表”的說明。
16進制模擬量數據傳送順序:Hi…Lo先發送高字節,再發送低字節。
3.2以當前工況進入恒無功調節
向00D5寄存器寫入1執行命令,再延時100 ms以上寫入0復歸命令,可以使勵磁系統無條件進入恒無功調節狀態,無功設定值為當前的無功值。
(1)執行命令(寫入1)格式(表4)

表4
(2)執行命令的響應格式(表5)

表5
(3)復歸命令(寫入0)格式(表6)

表6
(4)復歸命令的響應格式(表7)

表7
3.3退出恒無功調節
向00D6寄存器寫入1執行命令,再延時100 ms以上寫入0復歸命令,可以使勵磁系統退出恒無功調節。
(1)執行命令(寫入1)格式(表8)

表8
(2)執行命令的響應格式(表9)

表9
(3)復歸命令(寫入0)格式(表10)

表10
(4)復歸命令的響應格式(表11)

表11
3.4當前工況進入恒功率因數
向00D7寄存器寫入1執行命令,再延時100ms以上寫入0復歸命令,可以使勵磁系統無條件進入恒功率因數調節狀態,功率因數給定值為當前的功率因數。
(1)執行命令(寫入1)格式(表12)

表12
(2)執行命令的響應格式(表13)

表13
(3)復歸命令(寫入0)格式(表14)

表14
(4)復歸命令的響應格式(表15)

表15
3.5退出恒功率因數
向00D8寄存器寫入1執行命令,再延時100 ms以上寫入0復歸命令,可以使勵磁系統退出恒功率因數調節。
(1)執行命令(寫入1)格式(表16)

表16
(2)執行命令的響應格式(表17)

表17
(3)復歸命令(寫入0)格式(表18)

表18
(4)復歸命令的響應格式(表19)

表19
3.6系統電壓跟蹤投入
向00D9寄存器寫入1執行命令,再延時100 ms以上寫入0復歸命令,可以使勵磁系統進入系統電壓跟蹤調節。
(1)執行命令(寫入1)格式(表20)

表20
(2)執行命令的響應格式(表21)

表21
(3)復歸命令(寫入0)格式(表22)

表22
(4)復歸命令的響應格式(表23)

表23
3.7退出系統電壓跟蹤
向00DA寄存器寫入1執行命令,再延時100 ms以上寫入0復歸命令,可以使勵磁系統退出系統電壓跟蹤調節。
(1)執行命令(寫入1)格式(表24)

表24
(2)執行命令的響應格式(表25)

表25
(3)復歸命令(寫入0)格式(表26)

表26
(4)復歸命令的響應格式(表27)

表27
3.8PSS投入
向00E1寄存器寫入1執行命令,再延時100ms以上寫入0復歸命令,可以使勵磁系統投入PSS功能。
(1)執行命令(寫入1)格式(表28)

表28
(2)執行命令的響應格式(表29)

表29
(3)復歸命令(寫入0)格式(表30)

表2830
(4)復歸命令的響應格式(表31)

表31
3.9PSS退出
向00E2寄存器寫入1執行命令,再延時100ms以上寫入0復歸命令,可以使勵磁系統退出PSS功能。
(1)執行命令(寫入1)格式(表32)

表32
(2)執行命令的響應格式(表33)

表33
(3)復歸命令(寫入0)格式(表34)

表34
(4)復歸命令的響應格式(表35)

表35
3.10命令列表
把上述命令匯總于表36。
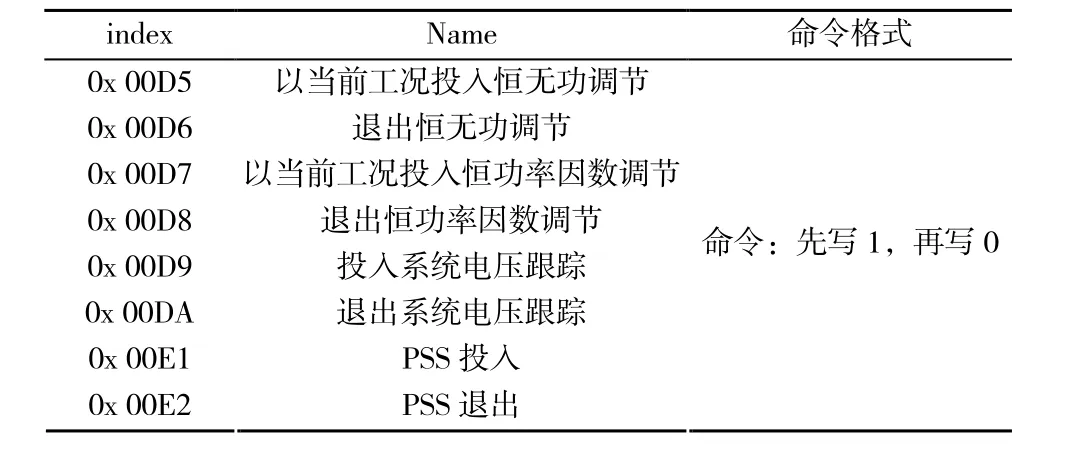
表36
4 勵磁系統輸出狀態定義表
向監控系統提供的R0~R23定義,必須與項目電氣圖紙“智能IIU板原理圖”中各接點的實際定義位置一致。利用專用智能IO定義程序可以靈活修改R0~R23定義。
“智能IIU板原理圖”中接點定義位置與R0~R23的對應關系見表37。
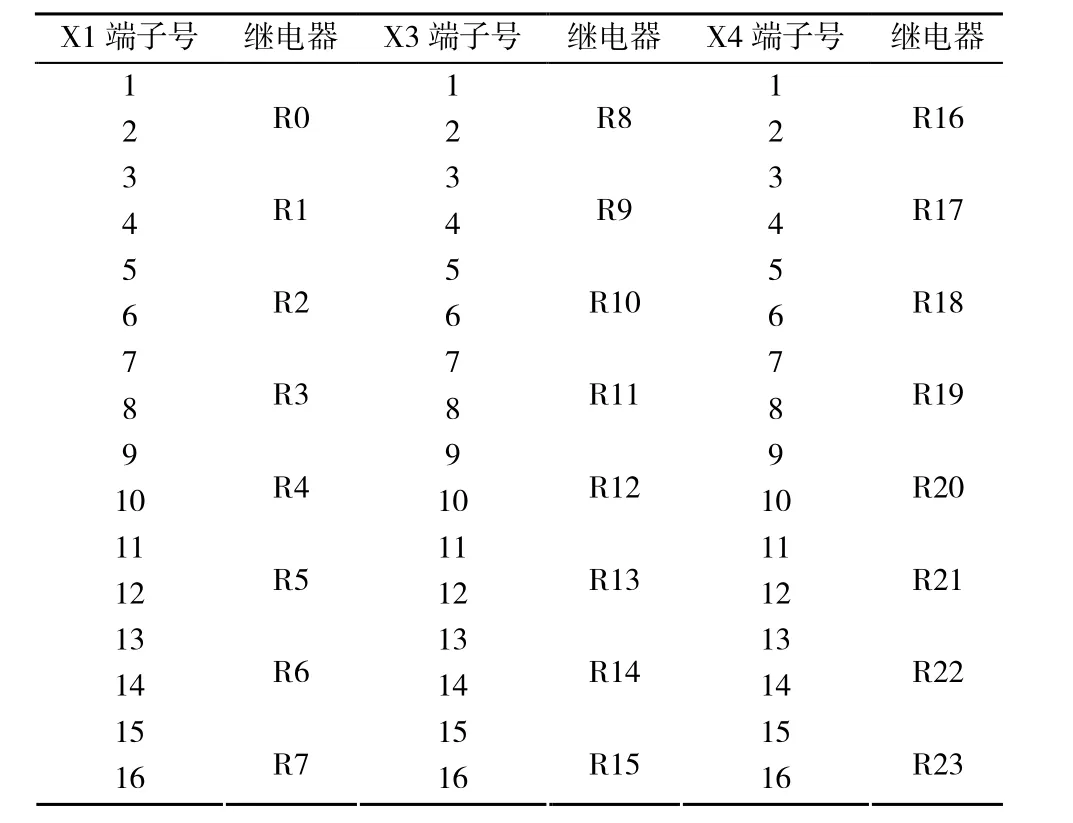
表37 勵磁系統輸出狀態定義表
5 結束語
近幾來,隨著微機勵磁調節器的全面進步,和監控系統LCU的連接已越來越多地采用了串行通訊的連接方式。水電站全數字式微機勵磁系統中專門配置了一塊智能IIU板,配置了專用的可編程芯片,用于處理與監控系統的串行通訊。根據當前電廠和監控系統的實際需求,筆者開發了MODBUS通訊協議配套的專用程序,可以MODBUS通訊規約和監控系統實現串行通訊。通訊接口硬件方式為性能先進、適用于遠距離傳輸的RS485接口。
TV736
A
1672-5387(2016)05-0026-03
10.13599/j.cnki.11-5130.2016.05.009
2016-03-21
徐金勇(1971-),男,工程師,研究方向:水電站運行與管理。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
