SRG風力發(fā)電系統(tǒng)最大功率跟蹤控制研究
2016-09-08 06:07:25程江洲萬鈞力三峽大學(xué)電氣與新能源學(xué)院湖北宜昌443002
電源技術(shù) 2016年1期
黃 曌, 程江洲, 萬鈞力(三峽大學(xué)電氣與新能源學(xué)院,湖北宜昌443002)
SRG風力發(fā)電系統(tǒng)最大功率跟蹤控制研究
黃曌, 程江洲, 萬鈞力
(三峽大學(xué)電氣與新能源學(xué)院,湖北宜昌443002)
以8/6極開關(guān)磁阻發(fā)電機(SRG)為例,基于電機的非線性特性提出一種基于模糊PI控制器的改進型轉(zhuǎn)速反饋最大功率跟蹤策略:通過SRG轉(zhuǎn)速及其變化率,確定模糊規(guī)則自行整定PI參數(shù),調(diào)節(jié)勵磁電流,控制電機輸出功率,使系統(tǒng)運行于最佳工作點。在Matlab平臺上搭建基于最大功率跟蹤策略的SRG系統(tǒng)仿真模型,仿真結(jié)果表明:外界風速穩(wěn)定時,SRG轉(zhuǎn)速和輸出功率均可平穩(wěn)保持在理論最佳值;風速變化時,SRG系統(tǒng)可快速實現(xiàn)自尋優(yōu),具備良好的動靜態(tài)性能,驗證了SRG仿真模型的正確性和控制策略的可靠性。
開關(guān)磁阻發(fā)電機;最大功率跟蹤;勵磁電流;轉(zhuǎn)速反饋
隨著風能的開發(fā)和利用,風力發(fā)電相關(guān)技術(shù)也取得了顯著的進步,并逐漸成為能源技術(shù)中的一個重要分支[1-2]。風力發(fā)電面臨的主要問題之一是風力機機械功率的不確定性,隨外界風速變化而變化,因此系統(tǒng)必須包括風力機最大功率點跟蹤(maximum power point tracking,MPPT)的控制部分,從而在實時工況下達到所希望的最優(yōu)值,提高發(fā)電效率。由于開關(guān)磁阻發(fā)電機(SRG)優(yōu)良的調(diào)速性能、較強的容錯能力與自勵能力等優(yōu)勢,在風力發(fā)電領(lǐng)域具有很大的發(fā)展?jié)摿脱芯績r值[3-4]。SRG風力發(fā)電系統(tǒng)結(jié)構(gòu)如圖1所示,其中,控制系統(tǒng)作為風力發(fā)電系統(tǒng)的核心部分,主要實現(xiàn)兩大功能,一是SRG的發(fā)電運行控制:通過檢測SRG電流、電壓及轉(zhuǎn)子位置信號,控制功率變換器中主開關(guān)器件的通斷;二是MPPT控制,通過合適的自尋優(yōu)算法,完成SRG與風輪機的功率匹配,從而實現(xiàn)最大功率跟蹤。
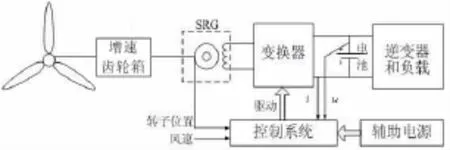
圖1 開關(guān)磁阻風力發(fā)電系統(tǒng)結(jié)構(gòu)
近年來,最大風能跟蹤的控制策略主要有風速跟蹤控制、轉(zhuǎn)速反饋控制和功率擾動控制[5-6]。其中風速跟蹤控制需要測量風速,功率擾動控制則需要較長的調(diào)節(jié)時間,均會降低系統(tǒng)可靠性,相比較而言,轉(zhuǎn)速反饋控制簡單易行,在小功率的風力發(fā)電場合得到廣泛的關(guān)注,但其單一的PI調(diào)節(jié)不能良好地適應(yīng)SRG本身的非線性特性[7]。綜合考慮以上三種控制方法的優(yōu)缺點,針對風力發(fā)電系統(tǒng)的需求,本文在傳統(tǒng)轉(zhuǎn)速反饋控制的基礎(chǔ)上加以改進,提出模糊PI控制方案,通過SRG實時轉(zhuǎn)速反饋與給定值比較,并結(jié)合轉(zhuǎn)速的變化情況,調(diào)節(jié)勵磁電流,驅(qū)使SRG輸出功率不斷跟蹤匹配值,從而改變電機的電磁轉(zhuǎn)矩和轉(zhuǎn)速,最終系統(tǒng)達到平衡,并穩(wěn)定運行于最佳工作點。完整的仿真研究驗證了控制策略的可行性與有效性。
1 MPPT控制算法
1.1風力機最大功率捕獲機理
設(shè)ρ為空氣密度,v為風速,R為風力機半徑,風機掃掠面積A=πR2,λ為葉尖速比,β為槳葉節(jié)距角,由貝茲定理風機得輸出機械功率Pm[8-9]:

式中:葉尖速比λ=ωmR/v,ωm為風力機機械角速度,Cp為風能利用系數(shù),由λ,β決定其值。當槳葉節(jié)距角β恒定時,Cp隨λ變化,且有一個確定的最佳葉尖速比λopt對應(yīng)最大的風能利用系數(shù)Cpmax,此時風力機運行在最大輸出功率點Pmax處。
風力機的特性曲線如圖2所示[10]。由圖2知,當風速固定時,風力機只有在某一轉(zhuǎn)速下運行才能輸出最大功率Pmax,此轉(zhuǎn)速同時也對應(yīng)該風速下的最佳葉尖速比λopt和最大風能利用系數(shù)Cpmax,偏離此點風力機輸出功率將會減小。連接各風速對應(yīng)的最大功率點即得最佳功率曲線。當風速變化時若及時調(diào)整風輪機的轉(zhuǎn)速,保持最佳葉尖速比,就能使風力機始終運行在最佳功率曲線上;又因為風機轉(zhuǎn)速ωm通過齒輪箱與電機轉(zhuǎn)速ωr成線性關(guān)系,因此控制SRG轉(zhuǎn)速即可實現(xiàn)尋優(yōu)。
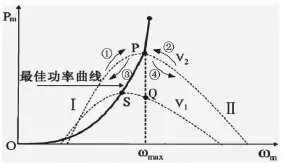
圖2 風力機特性曲線
1.2SRG風力發(fā)電機控制器的設(shè)計
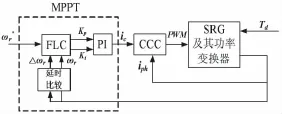
圖3 SRG控制系統(tǒng)框圖
如前所述,SRG的控制系統(tǒng)同時實現(xiàn)發(fā)電運行控制和MPPT控制功能。為簡單起見,SRG本體采用最為普遍的電流斬波控制方式(CCC),通過相繞組電流iph與勵磁電流的斬波閾值比較,產(chǎn)生PWM脈沖信號以控制功率變換器橋臂主開關(guān)的開通與關(guān)斷;風機驅(qū)動轉(zhuǎn)矩Td作用于SRG上,影響著電機角速度ωr,勵磁電流則由MPPT控制部分根據(jù)ωr及其變化量Δωr進行調(diào)節(jié),如圖3所示。轉(zhuǎn)速參考值ωr*由實時風速確定。
首先MPPT計算最優(yōu)工作點,將該點對應(yīng)的電機轉(zhuǎn)速作為反饋支路的給定值,λopt和Cpmax值確定的條件下,該給定值僅由當前風速決定:

由式(2)則可計算出風力機的最大機械功率:

將SRG轉(zhuǎn)速ωr與給定值ωr*相比較,并結(jié)合ωr的變化情況調(diào)節(jié)勵磁電流,通過電流斬波控制,勵磁電流變化引起SRG輸出功率P1變化,繼而引起電磁轉(zhuǎn)矩Te變化,在Te和風力機驅(qū)動轉(zhuǎn)矩Td共同作用下,ωr變化,并通過反饋再次與給定值進行比較,改變勵磁電流,不斷重復(fù)直至達到最佳工作點后,系統(tǒng)穩(wěn)定運行。
1.3控制規(guī)則的建立
由圖2可知,如果檢測到的電機轉(zhuǎn)速等于參考值,說明當前運行在最優(yōu)工作點處,勵磁電流維持原值。如果檢測到的ωr小于參考值,則工作點位于I區(qū),即最大功率點左側(cè),此時需要增大轉(zhuǎn)速,以跟蹤最大功率點:若此時Δωr大于0,工作點沿著路徑1的方向靠近最優(yōu)點,轉(zhuǎn)速增大,說明風力機輸出機械功率大于SRG輸出功率,為達到功率匹配應(yīng)增大P1,因此需增大勵磁電流;若此時Δωr小于0,工作點沿著路徑3的方向遠離最大功率點,轉(zhuǎn)速減小說明風力機輸出機械功率小于SRG輸出功率,為達到功率匹配應(yīng)減小P1,故需減小勵磁電流[11]。
同理當檢測到的ωr大于給定值,則工作點位于П區(qū),需要減小電機轉(zhuǎn)速。若此時Δωr大于0,即工作點沿著路徑4的方向遠離最優(yōu)點,轉(zhuǎn)速增大,說明風力機輸出機械功率大于SRG輸出功率,因此需增大勵磁電流;若此時Δωr小于0,工作點沿著路徑2的方向靠近最大功率點,轉(zhuǎn)速減小說明風機輸出機械功率小于SRG輸出功率,跟蹤最優(yōu)點還需進一步減小電機轉(zhuǎn)速,因此應(yīng)增大勵磁電流提高SRG輸出功率。
傳統(tǒng)的轉(zhuǎn)速反饋控制方案中,一般根據(jù)外界環(huán)境以及風輪機特征參數(shù)計算出給定參考值,并與電機的觀測值相比較得到誤差量,通過簡單的PI調(diào)節(jié)器給出勵磁電流的值。考慮到SRG非線性,同時為了避免風速突變引起系統(tǒng)的不穩(wěn)定,本文采用改進型的轉(zhuǎn)速反饋方案,選用二維模糊PI控制器,跟隨工況變化自動整定PI調(diào)節(jié)器的KP、KI參數(shù)值,進而調(diào)整勵磁電流的步長。選擇ωr及其變化量Δωr作為模糊控制器的輸入,KP、KI參數(shù)作為模糊控制器的輸出。按設(shè)計需要,將ωr、Δωr的論域分別表示為如下等級的模糊語言變量:{B,M,S,Z},{NB,NM,S,PM,PB},其隸屬度函數(shù)如圖4所示。
假設(shè)系統(tǒng)已工作在穩(wěn)定狀態(tài),當風速上升時,SRG轉(zhuǎn)速上升,功率差正向增大,此時取較大的KP和KI,允許轉(zhuǎn)速有一定超調(diào);當風速下降時,取更大的KP和KI,避免轉(zhuǎn)速下降幅度過大導(dǎo)致發(fā)電機堵轉(zhuǎn);當系統(tǒng)趨于穩(wěn)定時,為了避免在最佳功率點處來回振蕩,取較小的KP和KI。由上述控制思路,確定模糊規(guī)則如表1、表2所示[12]。
解模糊過程采用重心法,得到模糊邏輯控制器輸出的PI參數(shù)值,計算公式如下:

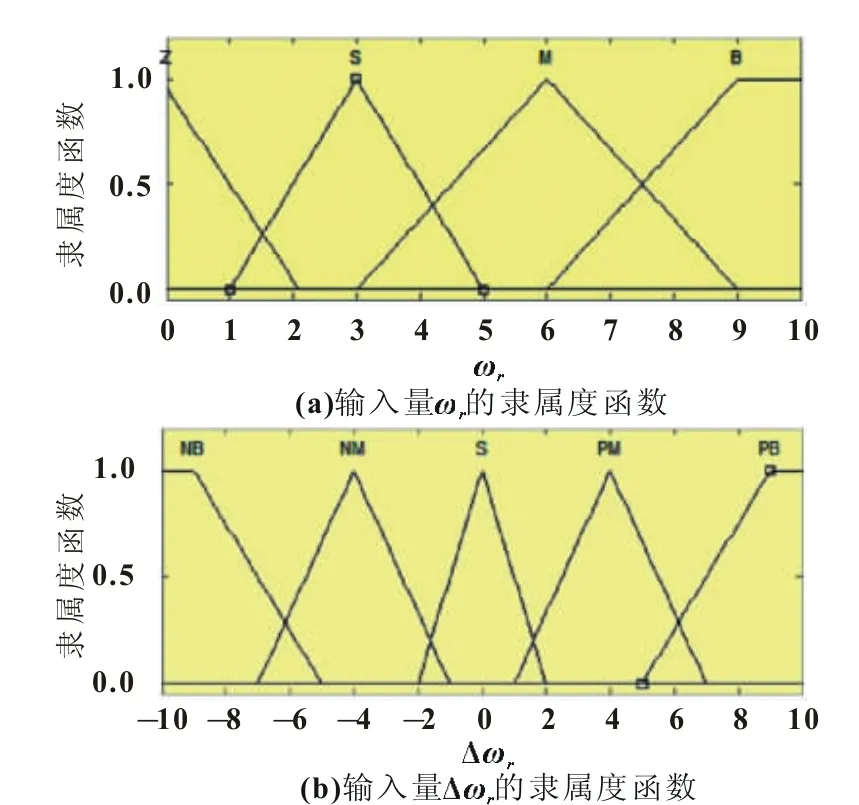
圖4 模糊控制器輸入量的隸屬度函數(shù)

?????KEK N B B B B B N M M M B B S S S M B P M S M M M P B B M M B E C

? ? ? ?? K K N B B M M BNM M M B BS Z S M MP M S M M M P B M S S M E C E

由于SRG本身所具有的非線性,僅依靠傳統(tǒng)轉(zhuǎn)速反饋控制中簡單的PI調(diào)節(jié)并不能獲得良好的動態(tài)特性。本文采用了改進型的轉(zhuǎn)速反饋控制,同時進行轉(zhuǎn)速及其變化率的判別,自動調(diào)節(jié)PI參數(shù)完成自尋優(yōu)過程。該方法具備良好的動態(tài)響應(yīng),能避免功率控制中的較大擾動,而且簡單易行,不必知道整個系統(tǒng)精確模型,減少了設(shè)計難度。
2 仿真研究
分析SRG的數(shù)學(xué)模型,由前文所述MPPT算法,在Matlab平臺上進行仿真研究,相關(guān)參數(shù)如下:風力機半徑R=2 m,最佳葉尖速比λopt=6,槳葉節(jié)距角β=0°,最大風能利用系數(shù)Cpmax=0.36,空氣密度ρ=1.25 kg/m3,發(fā)電機與風輪機軸間通過增速比N=10的變速齒輪箱連接,即SRG旋轉(zhuǎn)角速度ωr和風力機機械角速度ωm滿足:ωr=10 ωm;四相SRG,8/6極,額定功率為750 W,額定轉(zhuǎn)速為2 000 r/min,為抑制電壓紋波,輸出端并聯(lián)濾波電容C=1 000 μF,負載RL=5 Ω,風速v在3~7 m/s范圍內(nèi)變化。
2.1穩(wěn)態(tài)特性
風速恒定時,SRG轉(zhuǎn)速恒定,系統(tǒng)穩(wěn)定運行在最大功率點處。設(shè)v=3 m/s,由式(2)、式(3)可計算出,此時對應(yīng)的電機轉(zhuǎn)速參考值應(yīng)為90 rad/s,風輪機最大輸出功率為76.3 W,系統(tǒng)的仿真結(jié)果如圖5所示。由仿真結(jié)果易知,SRG的實際轉(zhuǎn)速和輸出功率都與理論值吻合,經(jīng)過0.2 s左右的過渡時間,系統(tǒng)穩(wěn)定運行在最優(yōu)工作點,靜態(tài)性能理想,驗證了SRG非線性模型和MPPT控制策略的正確性。
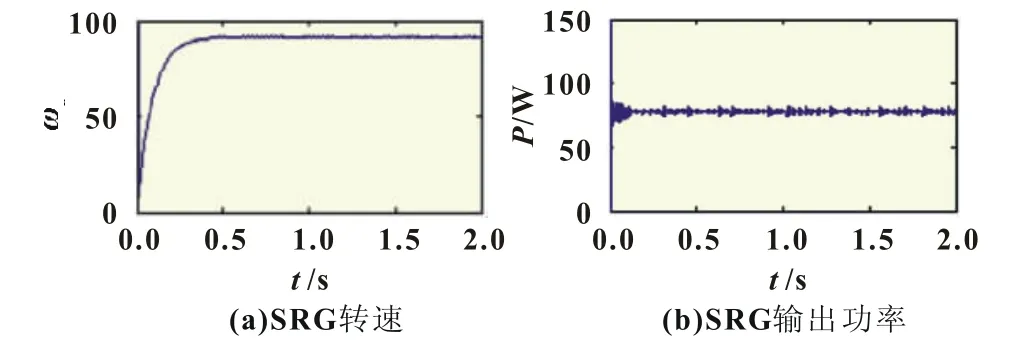
圖5 風速3 m/s時SRG的靜態(tài)輸出
再令風速v=6.42 m/s,由式(2)、式(3)可計算出,對應(yīng)的電機轉(zhuǎn)速參考值應(yīng)為192.6 rad/s,風輪機最大輸出功率為747.9 W,仿真結(jié)果如圖6所示。由圖6知,系統(tǒng)經(jīng)過短暫的調(diào)節(jié)便可實現(xiàn)最大功率跟蹤,響應(yīng)迅速。同時該風速下,SRG的最優(yōu)工作點即為額定狀態(tài),SRG穩(wěn)定運行于額定轉(zhuǎn)速和額定功率。由于滿負載運行,SRG的輸出功率振蕩比較低風速時段而言略大,但是仍在允許范圍內(nèi)。
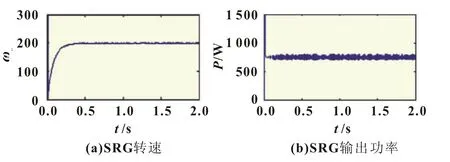
圖6 風速6.42 m/s時SRG的靜態(tài)輸出
2.2動態(tài)特性
當風速變化,風輪機對發(fā)電機的驅(qū)動轉(zhuǎn)矩Td不再為恒值,SRG的轉(zhuǎn)速隨之發(fā)生變化。由式(2)、式(3)可計算得:當風速v 為4、5 m/s時對應(yīng)電機轉(zhuǎn)速給定值分別為120、150 rad/s,風力機最大機械功率分別為180.7、353.3 W。先擬定工況A:1 s時刻風速由4 m/s階躍上升至5 m/s,仿真結(jié)果如圖7所示。
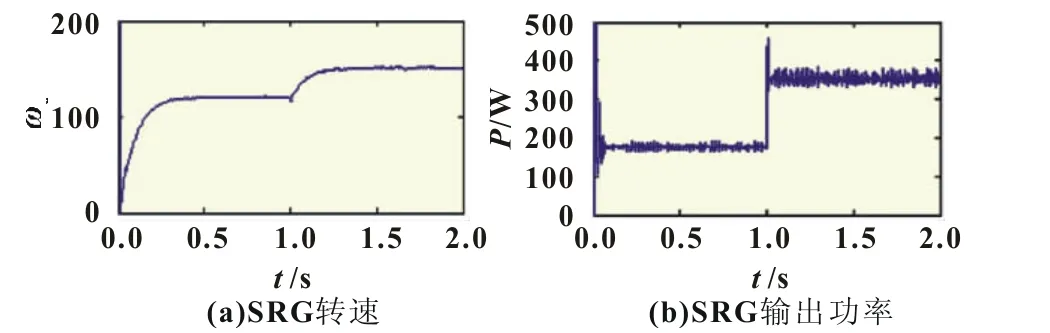
圖7 風速4 m/s上升至5 m/s時SRG動態(tài)輸出
由仿真結(jié)果可看出,系統(tǒng)能夠平穩(wěn)輸出,電機轉(zhuǎn)速在風速突變前后都能很好地逼近給定參考值,實現(xiàn)最大功率點的跟蹤。在風速突變時刻,動態(tài)響應(yīng)迅速,電機轉(zhuǎn)速和輸出功率僅需短暫的過渡時間就能找到新的最佳工作點并穩(wěn)定運行。
再擬定仿真工況B:1 s時刻風速由4 m/s階躍下降至3 m/s,仿真結(jié)果如圖8所示。由圖8易知,SRG轉(zhuǎn)速由120 rad/s下降至90 rad/s左右,輸出功率由180.7 W下降為76.3 W,與理論值相符,能快速完成相應(yīng)風速下的自尋優(yōu)過程,表明基于本文所采用的MPPT控制算法可使系統(tǒng)對風速變化具有良好的抗擾性能和動態(tài)響應(yīng)能力,SRG的輸出功率諧波含量理想,能夠滿足用戶需求。此外,在風速減小的工況下,系統(tǒng)未出現(xiàn)電機堵轉(zhuǎn)等不穩(wěn)定情況。綜合上述穩(wěn)態(tài)、動態(tài)特性仿真結(jié)果也可看出,SRG風力發(fā)電系統(tǒng)更適合于中低速、小功率的發(fā)電場合,電機輸出功率振蕩較小,電能質(zhì)量更為理想。
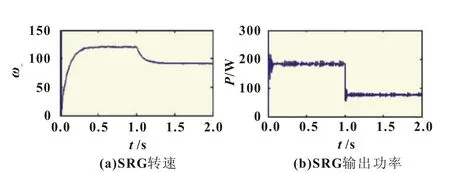
圖8 風速4 m/s下降至3 m/s時SRG動態(tài)輸出
3 結(jié)論
本文基于SRG的實際特性分析了其數(shù)學(xué)模型,驗證了模型的正確性,并針對SRG的非線性和實際工況風力機輸出功率最優(yōu)化的需求,提出一種最大功率跟蹤的實現(xiàn)方法,在傳統(tǒng)轉(zhuǎn)速反饋控制的基礎(chǔ)上加以改進,增加電機轉(zhuǎn)速變化率的判定環(huán)節(jié)以明確系統(tǒng)工作區(qū)域,并基于模糊PI控制器實現(xiàn)參數(shù)的自整定,通過勵磁電流控制SRG輸出功率達到匹配值,完成功率跟蹤。仿真結(jié)果證明該方法在風速恒定、風速突增、風速突降的工況下都能得到所希望的輸出電能,動靜態(tài)環(huán)境中都能良好地逼近最佳工作點,輸出穩(wěn)定,達到理想的控制效果,對SRG風力發(fā)電系統(tǒng)的工程應(yīng)用具有指導(dǎo)意義。
[1]凌禹,張同莊.變速風力發(fā)電系統(tǒng)控制技術(shù)綜述[J].電力自動化設(shè)備,2008,28(3):122-124.
[2]陳堂賢,陶稷,陶莉,等.基于自適應(yīng)模糊控制的雙饋異步風力發(fā)電機[J].三峽大學(xué)學(xué)報:自然科學(xué)版,2008,30(3):45-48.
[3]孫國霞,李嘯驄,蔡義明.大型變速恒頻風電系統(tǒng)的建模與仿真[J].電力自動化設(shè)備,2007,27(10):69-72.
[4]張海軍,高瑞貞,張京軍,等.開關(guān)磁阻電機非線性計算及動態(tài)系統(tǒng)仿真研究[J],電氣傳動,2008,38(8):64-68.
[5]駱再飛,于華,蔣靜坪.開關(guān)磁阻電機轉(zhuǎn)矩控制策略研究[J].電氣傳動,2008,38(10):39-42.
[6]盧佳奇,熊和金.海上風電MPPT灰預(yù)測模糊控制的研究[J].三峽大學(xué)學(xué)報:自然科學(xué)版,2011,33(2):36-39.
[7]HUANG Z,YI L Z,PENG H M,et al.Research and control of SRG for variable-speed wind energy applications[C]//Proceedings of the International Power Electronics and Motion Control Conference.Wuhan:IEEE,2009:2238-2243.
[8]胡海燕,潘再平.開關(guān)磁阻風電系統(tǒng)最大風能追蹤控制[J].太陽能學(xué)報,2005,26(6):787-791.
[9]HASANIEN H M,MUYEEN S M.Speed control of grid-connected switched reluctance generator driven by variable speed wind turbine using adaptive neural network controller[J].Electric Power Systems Research,2012,84:206-213.
[10]CHANG Y C.On the design of power circuit and control scheme for switched reluctance generator[J].IEEE Trans Power Electronics,2008,19(4):1-9.
[11]熊立新,徐丙垠,高厚磊,等.一種開關(guān)磁阻風力發(fā)電機最大風能跟蹤方法[J].電工技術(shù)學(xué)報,2009,24(11):1-7.
[12]呂佃順.開關(guān)磁阻風力發(fā)電機控制器設(shè)計與實驗研究[D].濟南:山東大學(xué),2008.
Research on MPPT control for SRG wind power generation system
HUANG Zhao,CHENG Jiang-zhou,WAN Jun-li
(College of Electrical Engineering and New Energy,Three Gorges University,Yichang Hubei 443002,China)
Taking the Switched Reluctance Generator(SRG)with 8 stator poles&6 rotor poles for example, considering the nonlinear characteristics of SRG,a developed rotational speed feedback control strategy based on fuzzy PI controller for maximum power point tracking(MPPT)was presented.The parameters for PI were adjusted and the excitation current was regulated automatically by comprehensive judgments of rotational speed and its error signal to control output electric power of the SRG machine,to optimize the mechanical power of wind turbine.The system operation capability could be improved.Simulation models of SRG wind power system with proposed MPPT control scheme proposed were established based on MATLAB platform.The results show the correctness of SRG nonlinear models and reliability of the MPPT algorithm,showing that SRG outputs could follow the theoretical maximum values at stable conditions or variable working situation,therefore excellent static and dynamic performances could be obtained.
switched reluctance generator;maximum power point tracking;excitation current;rotational speed feedback
TM 614
A
1002-087 X(2016)01-0162-04
2015-06-15
湖北省自然科學(xué)基金項目(2010CDB10803);三峽大學(xué)人才科研啟動基金(KJ2012B047)
黃曌(1985—),女,湖南省人,碩士,講師,主要研究方向為電力電子裝置與系統(tǒng)。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
電機與控制應(yīng)用(2021年12期)2021-02-28 07:55:52
海洋通報(2020年5期)2021-01-14 09:26:54
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
西南交通大學(xué)學(xué)報(2016年4期)2016-06-15 20:29:37
電測與儀表(2015年8期)2015-04-09 11:50:06
