基于橫向地球坐標系的極區慣導機械編排研究*
2016-09-09 09:21:24張漢武王海波張萍萍
艦船電子工程 2016年8期
關鍵詞:機械
張漢武 王海波 張萍萍
(1.海軍大連艦艇學院研究生管理大隊 大連 116018)(2.海軍大連艦艇學院航海系 大連 116018)
ZHANG Hanwu1 WANG Haibo2 ZHANG Pingping1
(1.Department of Graduate Management, Dalian Naval Academy, Dalian 116018) (2.Department of Navigation, Dalian Naval Academy, Dalian 116018)
?
基于橫向地球坐標系的極區慣導機械編排研究*
張漢武1王海波2張萍萍1
(1.海軍大連艦艇學院研究生管理大隊大連116018)(2.海軍大連艦艇學院航海系大連116018)
地理經線在極區收斂于極點,這造成了以經線作為航向參考基準,位置用經緯度坐標表示的傳統慣性導航系統機械編排在極區(尤其是極點附近)確定基本導航參數困難的問題。針對此問題,建立了橫向地球坐標系,構建了偽經緯網,推導出橫向坐標系與常規坐標系的變換及定向定位參數的轉換關系。最后,提出并設計了以四元數表示艦船姿態、以橫向地球直角坐標表示艦船位置、以橫向地理坐標系為導航坐標系的極區慣導機械編排方案。
慣性導航; 極區慣導; 橫向地球坐標系; 機械編排
ZHANG Hanwu1WANG Haibo2ZHANG Pingping1
(1.Department of Graduate Management, Dalian Naval Academy, Dalian116018) (2.Department of Navigation, Dalian Naval Academy, Dalian116018)
Class NumberTN966
1 引言
2015年5月26日,我國政府發布了《中國的軍事戰略》國防白皮書,其中的“遠海護衛”戰略對我海軍的發展提出了新要求。北極圈資源豐富,經濟潛力巨大,21世紀以來,北極戰略地位日益突出,北極開發利用成為各方關注的焦點。為確保我國在北極利益不受侵犯,作為執行特殊使命的海軍艦船和潛艇必須立足于可全天候、全時間工作的自主式導航系統。而現代導航均以經線作為航向參考基準,位置用經緯度坐標來表示,而北極地區位于地球的最北端,經線迅速收斂于極點。這就造成了建立相對經線的航向參考基準越來越困難,并且在北極點,所有的方向都是南,這就為極區導航帶來了困難,這也就是導致傳統慣性導航系統在極區無法定向的原因。此外,隨著極區經線的快速收斂,極區經緯度誤差也越來越大,因此,在極區還存在定位難的問題[1~4]。
游動方位慣性導航方法是解決極區導航問題的一種方法,但在近極點區域使用時,存在難以區分游動方位角和經度值等缺陷。這是由經緯度描述載體位置的局限性造成的[5]。
為解決極區定向定位難的問題,建立了橫向地球坐標系,構建了偽經緯網,推導出橫向坐標系與常規坐標系、及定向定位參數間的變換關系。最后,設計并提出了以四元數表示艦船姿態、以橫向地球直角坐標表示艦船位置、以橫向地理坐標系為導航坐標系的極區慣導機械編排方案。
2 坐標系與偽經緯網的構建
1) 慣性坐標系(i系),坐標原點設在地球中心,x軸指向春分點,z軸與地軸重合,y與x構成右手直角坐標系。
2) 地球坐標系(e系),以地球中心為坐標原點,坐標軸相對于地球靜止,x軸在赤道平面內與格林威治子午線相交,z軸與地軸重合,y通過右手法則確定。
3) 地理坐標系(t系),原點位于載體的質心P點,坐標軸指向東、北和當地垂線方向(向上)。
4) 載體坐標系(b系),為正交坐標系,與運載體直接固聯,隨運載體的運動而運動[6~7]。
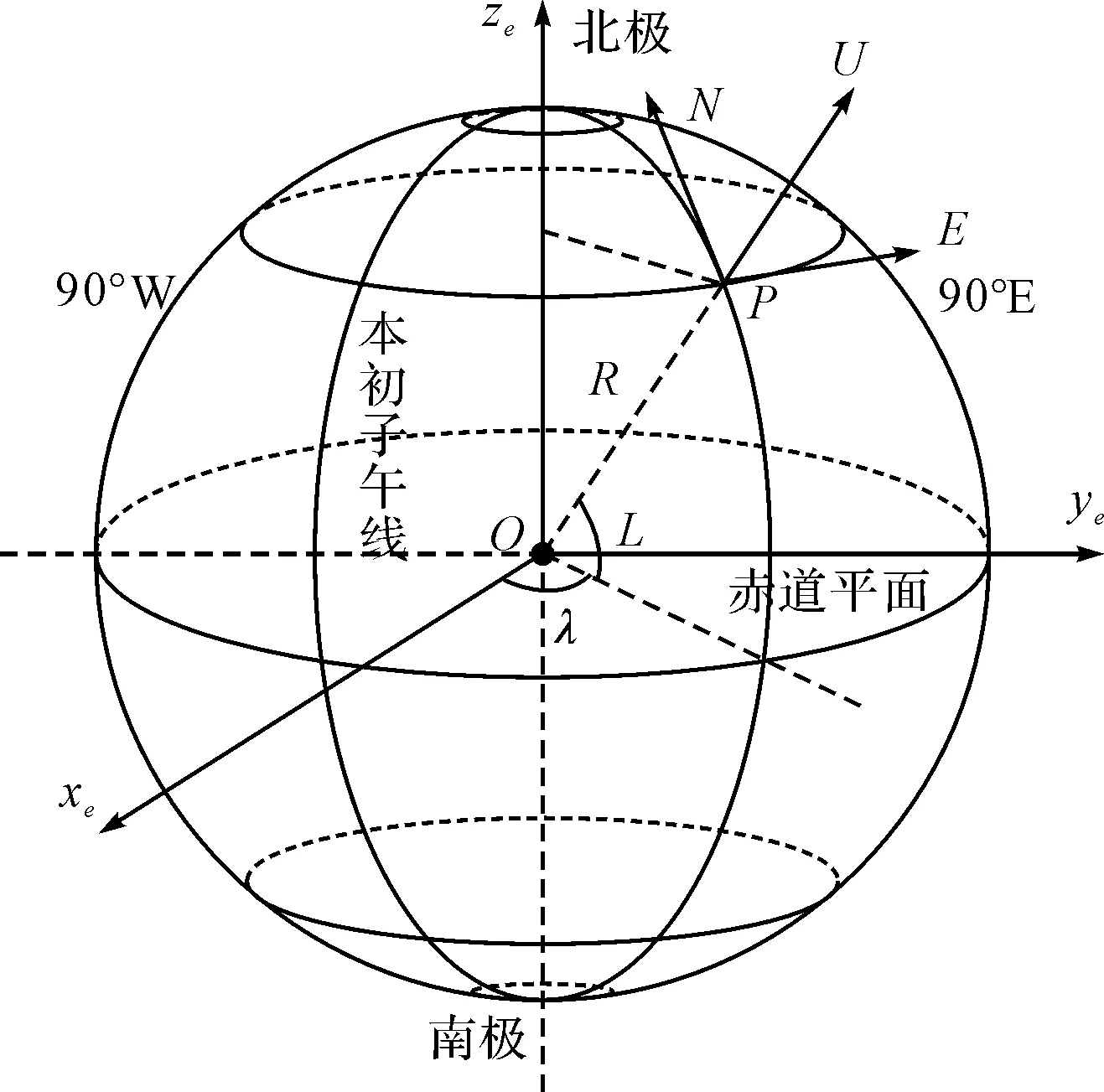
圖1 地球坐標系與地理坐標系
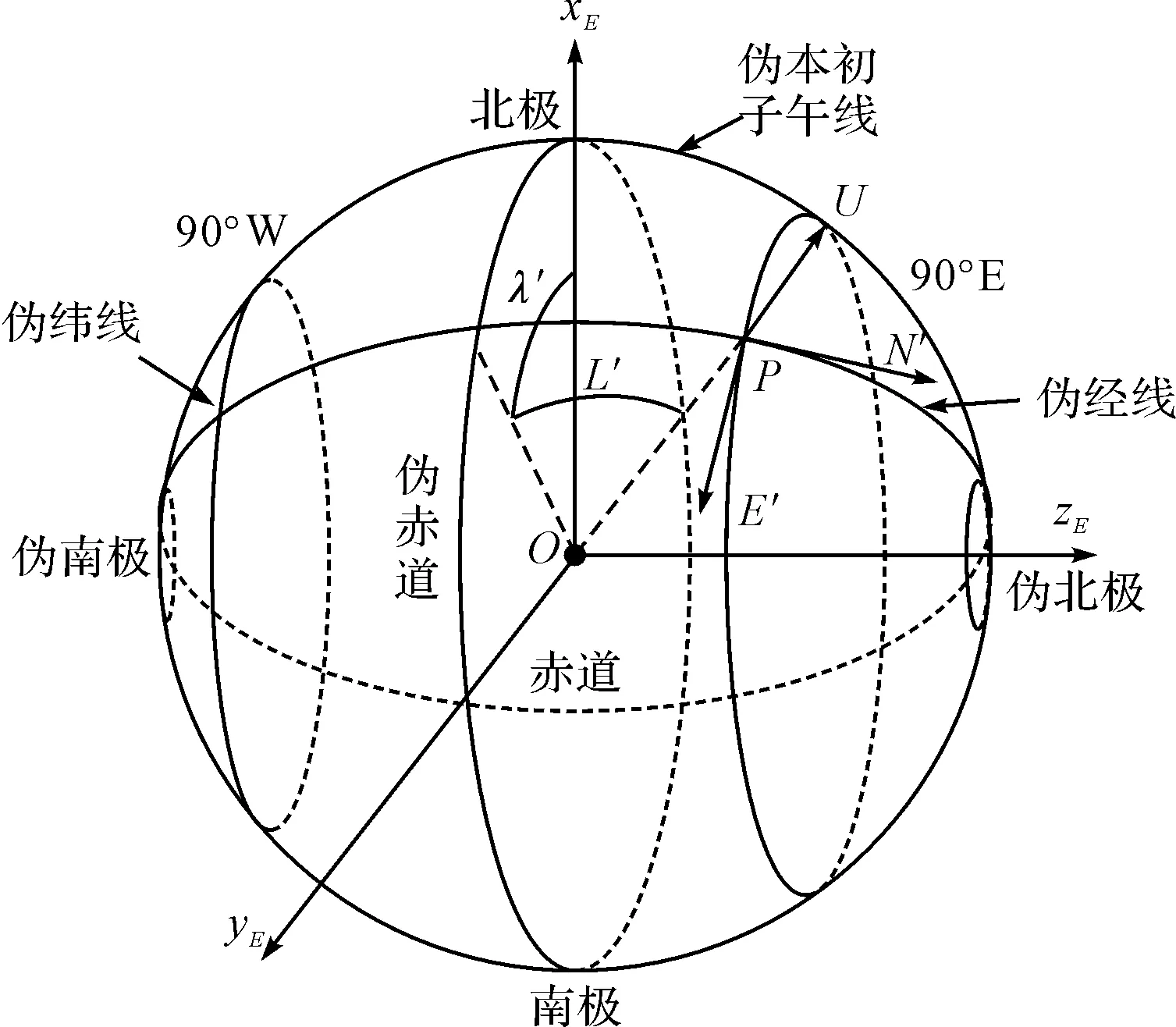
圖2 坐標系與偽經緯網
6)構建偽經緯網。極點處子午線匯聚成一點是引起定向與定位難題的根本原因,為適應極區導航的需要,本文基于橫向地球坐標系構建圖2所示的偽經緯網、建立橫向地球坐標(偽經緯度)。其中,90°E與赤道的交點定義為偽北極點,90°W與赤道的交點定義為偽南極點,0°與180°經線為偽赤道,北半球的90°W與90°E經線構成偽本初子午線。偽經度用λ′表示,偽緯度用L′表示。至此,載體的位置用經緯度表示為[λL],偽經緯度坐標表示為[λ′L′]。
7) 橫向地理坐標系(T系)。基于構建的偽經緯網建立地球上任意一點P處的橫向地理坐標系PE′N′U(偽東北天)。其中,PE′與P點處偽緯線相切,指向偽東,PN′與P點處偽經線相切,指向偽北,PU沿P點處的垂線方向,指向天頂[8]。
3 坐標系的變換及定向定位參數的轉換
3.1坐標系的變換
通過圖1和圖2,可以得知地球坐標系轉換到橫向地球坐標系,經過了2次轉動,轉動的歐拉角均為-90°,轉動的過程可以表示為

(1)
地球坐標系與地理坐標系間的變換矩陣為
(2)
橫向地球坐標系與橫向地理坐標系間的變換矩陣為
(3)
通過圖3,可以看出橫向地理坐標系與地理坐標系之間在U軸方向有一個σ的夾角,所以橫向地理坐標系與地理坐標系間的變換矩陣為
(4)
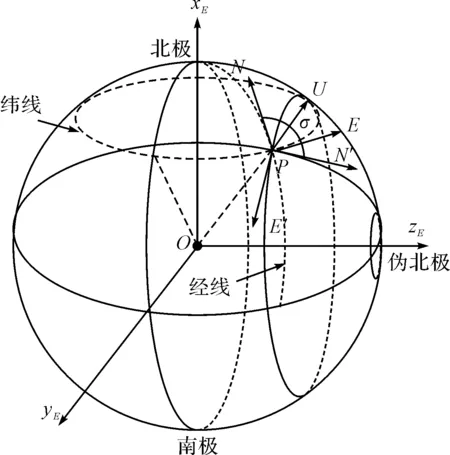
圖3 橫向地理坐標系與地理坐標系間的變換關系
地球坐標系與橫向地理坐標系間的變換矩陣為
(5)
根據矩陣間的轉換關系也可以表示為
(6)
式(5)與式(6)聯立,并將式(1)~式(4)代入,求得
(7)
(8)
或
(9)
(10)
3.2定向定位參數的轉換
當艦船在中低緯度地區航行時,一般仍使用指北方位慣性導航系統機械編排;當艦船航行至高緯度地區時,需將慣性導航系統機械編排切換為基于橫向地球坐標系的極區慣性導航系統機械編排。為保證系統在機械編排切換時不發生超調現象,使系統在兩種機械編排間平穩過渡,需將兩種機械編排中的定向定位參數進行精確的轉換[9]。
載體系與橫向地理坐標系間的變換矩陣
(11)
其中方向余弦矩陣
(12)
(13)
則
(14)
假設地球為球體,地球半徑為R,則P點在地球坐標系中的位置矢量為
(15)
P點在橫向地球坐標系中的位置矢量為
(16)
又
(17)
將式(1)、式(15)與式(16)代入式(17)得經緯度與偽經緯度的關系
(18)
(19)
4 基于橫向地球坐標系的極區慣導機械編排
4.1姿態微分方程
記Q為表征剛體旋轉的規范化四元數,則姿態四元數滿足如下微分方程:
(20)

式(20)寫成矩陣形式為
(21)
(22)

其中
4.2速度微分方程

(23)
式中
4.3位置微分方程
艦船位置用橫向地球直角坐標(x′y′z′)表示。這種位置表示方式可方便同極區海圖配合使用。
記
(24)
則位置微分方程為
(25)

將式(16)、式(24)代入式(25),求得偽經緯度和橫向地球坐標直角坐標間的關系:
(26)
(27)
載體位于北半球時,sinL′取正號,位于南半球時,sinL′取負號。通過上述各式可以看出:偽經緯度均可通過上式直接求解。這樣就便于繪制在橫軸墨卡托海圖上,為使導航參數可直接使用,需將偽經緯網套印于橫軸墨卡托海圖上。
5 結語
本研究通過建立橫向地球坐標系、構建偽經緯網,將偽極點設置于赤道平面,解決了傳統慣性導航系統機械編排在極區導航時存在的問題(尤其是極點附近無可靠地航向參考基準)。本文給出了定向定位參數在常規坐標系與橫向坐標系之間的轉換關系,為慣性導航系統機械編排的切換提供了基
礎。最后,設計并提出了以四元數表示載體姿態、以橫向地球直角坐標表示載體位置、采用橫向地理坐標系為導航坐標系的極區慣導機械編排方案,為解決極區導航問題提供了一種方法。
[1] Leonid D. Arctic Navigation[J]. Polar Navigation,2015,2(1):173-181.
[2] Anderson E W. Navigation in polar regions[J]. Journal of Navigation,1957,10(2):156-161.
[3] 朱啟舉,秦永元,周琪.極區航空導航綜述[J].測控技術,2014,33(10):5-8.
[4] Maclure K C. Polar navigation[J]. Arctic,1941,2(3):183-194.
[5] 王海波,張漢武,張萍萍,等.一種適用于近極點地區的慣性導航算法[J].中國航海,2015,38(4):11-15.
[6] Woodman O J. An introduction to inertial navigation[R]. Cambridge: the University of Cambridge,2007.
[7] Titterton D H, Weston J L. Strapdown Inertial Navigation Technology[M]. 2nd Edition ed. The American Institute of Aeronautics and Astronautics,2004:23-29.
[8] 秦永元.慣性導航[M].2版.北京:科學出版社,2014:254-255.
[9] 李倩,孫楓,奔粵陽,等.基于橫坐標系的捷聯慣導系統極區導航方法[J].中國慣性技術學報,2014,22(3):288-295.
[10] 周琪,秦永元,付文強,等.極區飛行格網慣性導航算法原理[J].西北工業大學學報,2013,31(2):210-217.
[11] 徐曉蘇,豆嫚.基于橫向地理坐標系的極區慣性導航方法研究[J].華中科技大學學報(自然科學版),2014,42(12):116-121.
Polar INS Mechanization Based on Transverse Terrestrial Coordinate System*
The convergence of the geographic meridians to the pole in Arctic makes obtaining essential navigation information difficult when in polar regions ( especially near the poles ) using conventional INS mechanization which uses meridians as heading reference and expresses positions as longitude and latitude coordinates. Given this, transverse terrestrial coordinate system is established, and false graticules is constructed. Transformational relationship between transverse coordinate systems and conventional coordinate systems as well as parameters of direction and fixing is deduced. In the end, it puts forward and designs INS mechanization in Arctic which uses quaternion as ship attitude, expresses ship position as transverse terrestrial orthogonal coordinate and selects transverse geographic coordinate system as its navigation system.
INS, polar INS, transverse terrestrial coordinate system, mechanization
2016年2月10日,
2016年3月24日
張漢武,男,碩士研究生,研究方向:慣性導航理論與技術。王海波,男,高級工程師,研究方向:船舶導航技術。張萍萍,女,博士研究生,研究方向:高緯度導航方法。
TN966
10.3969/j.issn.1672-9730.2016.08.017
猜你喜歡
機械工程材料(2022年10期)2022-11-21 12:08:44
小學科學(學生版)(2021年9期)2021-11-02 05:26:46
電腦報(2020年35期)2020-09-17 13:25:53
當代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
建材發展導向(2019年13期)2019-08-24 06:37:40
電子制作(2018年14期)2018-08-21 01:38:14
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
筑路機械與施工機械化(2017年6期)2017-07-10 11:54:50
科技知識動漫(2016年8期)2016-07-29 20:40:09
