艦載機光學引導模擬訓練系統設計及實現*
2016-09-09 09:21:29潘傳勇
艦船電子工程 2016年8期
潘傳勇 張 濤 黃 葵
(海軍航空工程學院青島校區 青島 266041)
PAN Chuanyong ZHANG Tao HUANG Kui
(Navy Aeronautical Engineering Academy Qingdao Branch, Qingdao 266041)
?
艦載機光學引導模擬訓練系統設計及實現*
潘傳勇張濤黃葵
(海軍航空工程學院青島校區青島266041)
論文利用工控機、PC104單板機、單片機等主控單元,對艦載機光學引導模擬訓練系統進行設計,采用CAN總線監控網絡技術、網絡橋接技術和故障模擬技術,實現了艦載機光學引導系統多項模擬訓練功能。
光學引導; 模擬訓練系統; 設計與實現
PAN ChuanyongZHANG TaoHUANG Kui
(Navy Aeronautical Engineering Academy Qingdao Branch, Qingdao266041)
Class NumberTP391.9
1 引言
光學引導裝置是艦載機著艦引導的重要組成部分,該裝置具有結構復雜、自動化程度高等特點,其操作管理的復雜性和難度較高,只有通過訓練有素的人員的正確使用,才能發揮出應有的作戰效能。然而,高水平的使用管理人員需要一個較長的持續訓練過程,由于艦艇操作管理人員具有定期的流動性,因此,如何保持和提高人員的訓練質量和訓練水平,是一個迫切需要解決的重要問題[1~3]。
目前,各國海軍使用的訓練方式及手段主要包括岸基訓練和實船海上訓練[4~7]。實船海上訓練效果好,作用不可替代,但存在訓練成本高、受外部因素影響大、承訓量有限等問題,解決這些問題的有效途徑是研制岸基模擬訓練系統[8],本文利用現場總線和計算機技術,研制了艦載機光學引導裝置模擬訓練系統,滿足了院校與部隊新裝備日常訓練和技術保障的實際需要。
2 系統組成
該系統設計的出發點就是模擬實操及訓練功能,能代替實際裝備進行戰位的操作訓練,在操作方式、顯示效果、界面信息等方面與實裝相同,同時還具有操作流程演練、故障設置與診斷、操作示范教學、考核評定等多項功能,能夠滿足院校教學和部隊模擬訓練要求[9]。
模擬訓練系統就是綜合運用多種仿真技術,模擬出實際操作環境和故障現象[10~11]。本模擬訓練系統包括訓練管理系統、燈光控制系統、模擬場景單元三部分,如圖1所示。
訓練管理系統包括訓練管理臺和燈具驅動電路板。訓練管理臺通過以太網向燈光控制系統發送故障設置信息,接收并記錄狀態信息和操作訓練信息,通過CAN總線發送燈具的故障信息,完成狀態監控、故障設置考核評定等任務。燈具驅動電路板接收燈光控制系統產生燈具的控制命令和訓練管理臺產生的燈具故障命令,將燈具控制命令轉換成模擬燈具的驅動信號,根據燈具故障命令模擬故障現象,并將燈具的狀態上報給燈光控制系統。
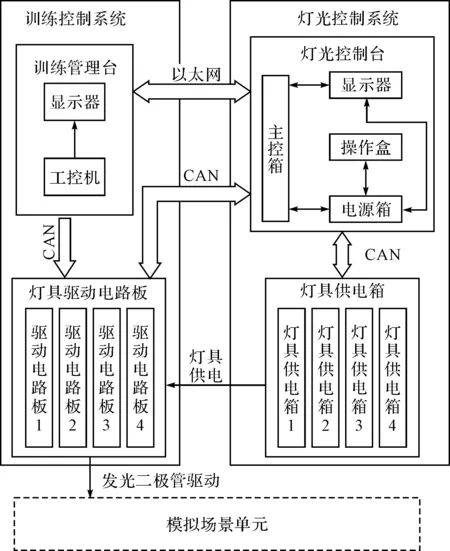
圖1 模擬訓練系統結構圖
燈光控制系統包括燈光控制臺和燈具供電箱。燈光控制臺具有操作功能,采集操作信息控制燈具的亮滅并進行亮度調整,采集燈具和燈具供電箱的狀態信息進行顯示,接收訓練管理臺設定的燈光控制系統故障信息,模擬相應的故障現象,向訓練管理系統發送操作信息作為考核評定依據。供電箱負責為燈具供電。燈光控制系統內部通過CAN總線進行信息傳遞。
模擬場景單元主要用來模擬顯示燈光控制系統的操作和故障模擬效果,利用高亮度的發光二極管代替實際燈具,以降低模擬訓練系統成本,減小系統占地面積。模擬場景單元實現起來相對容易,本文只討論訓練管理系統和燈光控制系統設計。
3 系統設計
3.1網絡架構設計
根據仿真對象復雜程度不同,系統采用了單片機、嵌入式PC104單板計算機、工控機等多種不同類型的計算機。根據不同通信要求,將模擬系統的網絡分為兩類。第一類為100Mbps以太網,由訓練管理臺、燈光控制臺組成,可以提高仿真數據和邏輯指令等信息的傳輸速度,實現大容量的通信。第二類是總線拓撲結構的CAN網絡,訓練管理臺、燈光控制臺中帶CAN接口的I/O板卡和供電箱、燈具驅動電路板則組成CAN現場監控網絡,實現燈具控制指令和狀態信息的實時傳輸,既滿足系統對通信速度的要求,又便于單片機系統的硬件實現。整個系統的網絡結構為兩級異構網絡。如圖2所示。
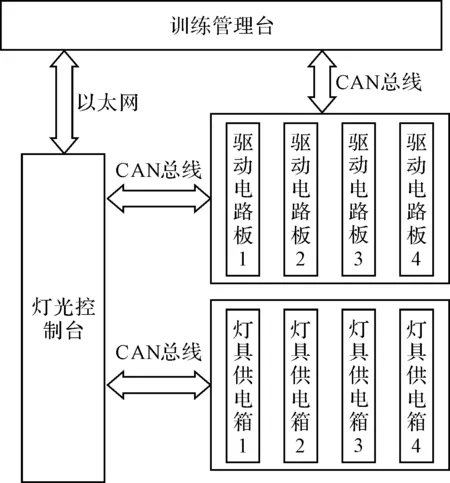
圖2 模擬訓練系統網絡架構
3.2訓練管理系統設計
3.2.1訓練管理臺設計
訓練管理臺主要與燈光控制臺和燈具驅動電路板進行信息交換,通過以太網向燈光控制臺發送控制系統故障設置信息,接收并記錄操作訓練信息,通過CAN總線將燈具故障信息發送給燈具轉換箱,接收燈具工作狀態。訓練管理臺與系統其它部分的信息關系如圖3所示。

圖3 訓練管理臺信息關系
設計訓練管理臺基于一臺研華工控機,內置以太網卡,與燈光控制臺通信;機箱內擴展一塊CAN總線通信卡,與燈具驅動電路板進行通信。
3.2.2燈具驅動電路板設計
秀容月明苦笑著說:“你請她都不來,我去請,她更不來。我出門一步,都有人跟著,就算把親兵都打發走,像賀三媳婦那些人,也會跟過來看熱鬧。那樣,還不如不去。”
模擬訓練系統中共有四塊燈具驅動電路板,分擔200多個發光二極管的控制任務,每塊電路板的結構和功能基本相同,差別在于所驅動的發光二極管燈數量略有不同。燈具驅動電路板結構框圖如圖4所示,主要包括單片機、CPLD、CAN總線接口電路、發光二極管恒流驅動電路、故障模擬單元等,完成信息接收與綜合、故障現象模擬、發光二極管的驅動等功能。

圖4 燈具驅動電路板結構框圖
燈具亮度的調節采用PWM波調光方式。通過調整PWM波的占空比來調節發光二極管的亮度。恒流驅動通過光電耦合器實現,設計光耦工作于線性狀態,通過設定輸入端串聯電阻值決定發光二極管的工作電流。故障模擬單元用來模擬燈具短路和斷路故障現象,實現電路如圖5所示。正常工作時,短路繼電器觸點斷開,斷路繼電器觸點吸合。當設定斷路故障時,首先使CPLD的輸出變為低電平,使光電耦合器輸出斷開,發光二極管熄滅,然后使短路繼電器常閉觸點吸合,此時用萬用表測量接線端1和3之間的電壓值為0V,模擬出短路故障信號。當設定斷路故障時,短路繼電器觸點斷開,CPLD的輸出信號保持不變,此時用萬用表測量接線端1和3之間的電壓值為5V,模擬出斷路故障信號。
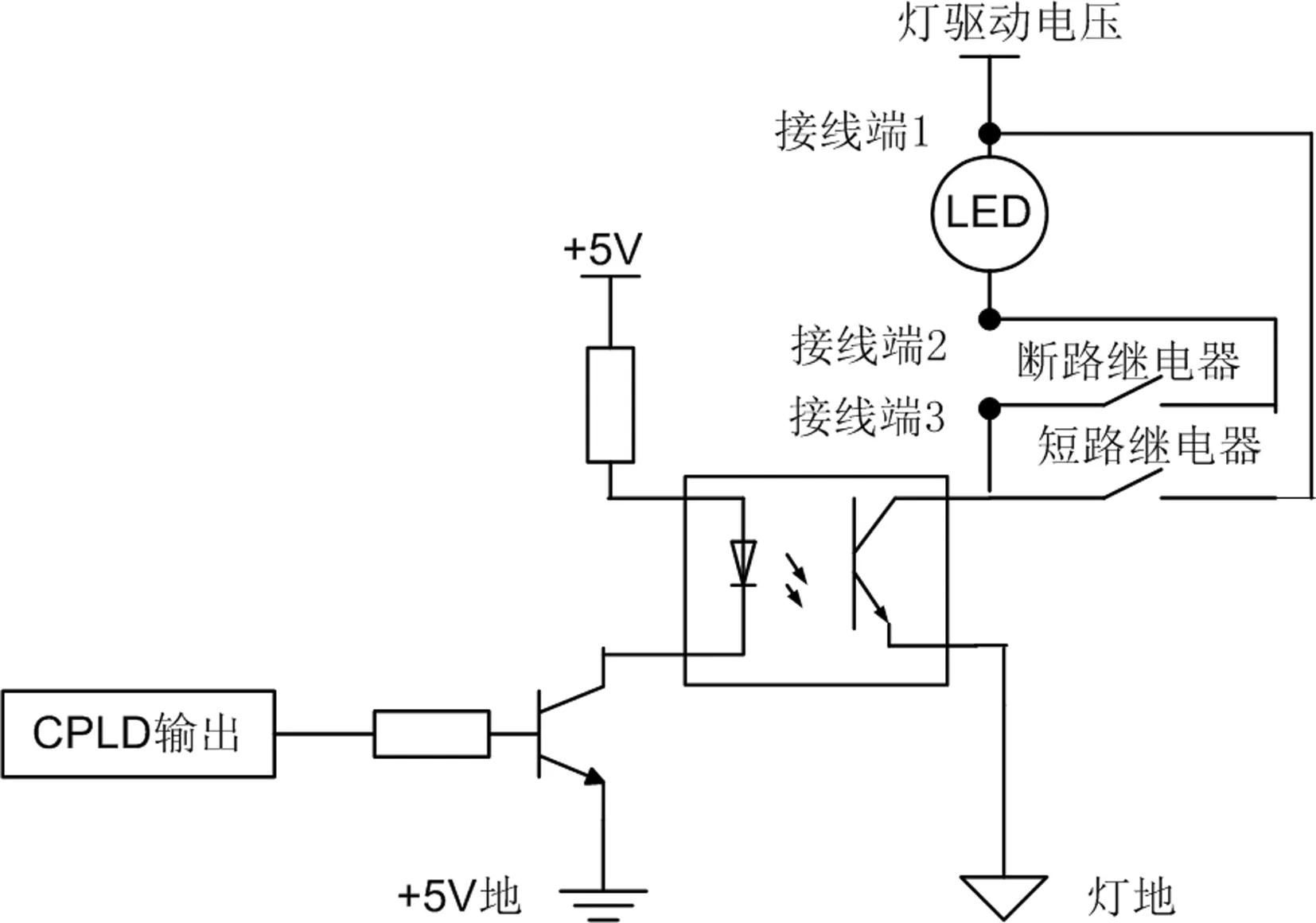
圖5 故障模擬單元電路
3.3燈光控制系統設計
3.3.1燈光控制臺設計
燈光控制臺是燈光控制系統的控制、顯示核心。主要完成系統操作狀態的采集、所有燈具的亮滅和調光控制、燈具工作狀態匯總、與供電箱以及燈具間的總線網絡狀態的監測、系統狀態的顯示、與訓練管理臺通信等功能。燈光控制臺包括主控箱、顯控盒、電源箱。
PC104模塊和8塊通信板構成主控箱。PC104模塊包括PC104主機板、CAN卡、寬溫高速型CF存儲卡和PC104電源板。主機板集成了PS/2 鍵盤鼠標接口、視頻輸出接口、以太網接口以及串行和并行接口,在極小空間里實現PC機幾乎所有的功能。由于PC104需要較穩定的電源,配備PC104系統專用的電源板,輸入電源范圍為7V~30V,輸出為穩定的5V,保證系統穩定可靠地運行。通過擴展CAN卡,實現PC104模塊和主控箱中的通信板及顯控盒進行通信。
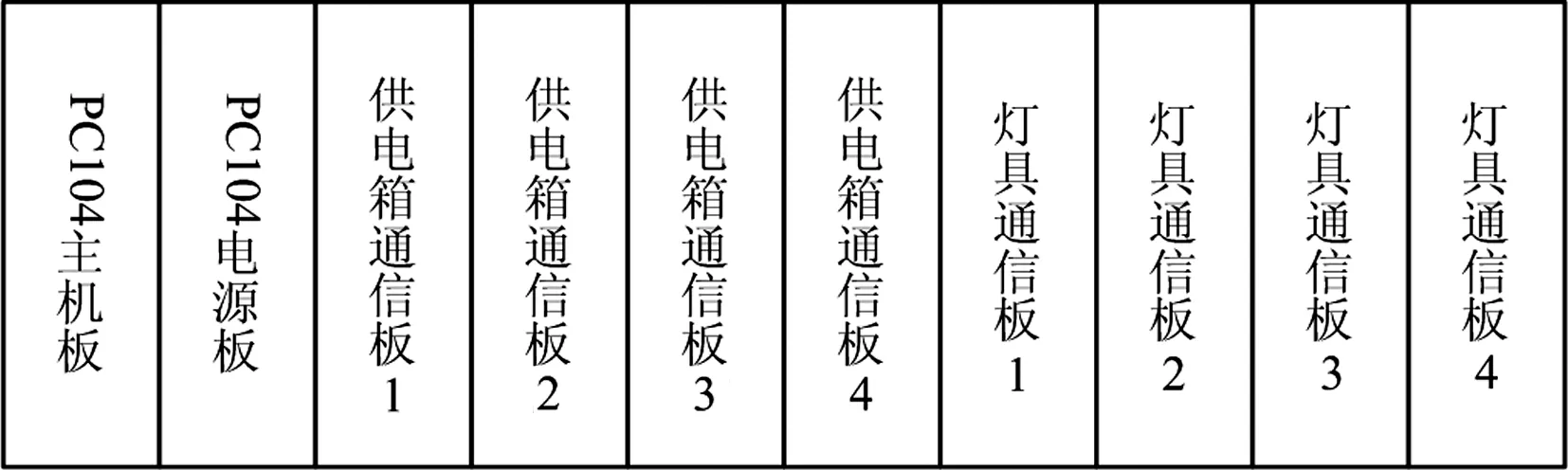
圖6 主控箱組成框圖
顯控盒的核心是顯控電路板,顯控電路板完成從操作面板上讀取控制命令,并對操作面板上的工作狀態指示燈以及鳴音器送驅動信號的任務。顯控電路板的主控芯片采用單片機,輔以各種I/O接口電路完成系統功能,其組成原理圖如圖7所示。
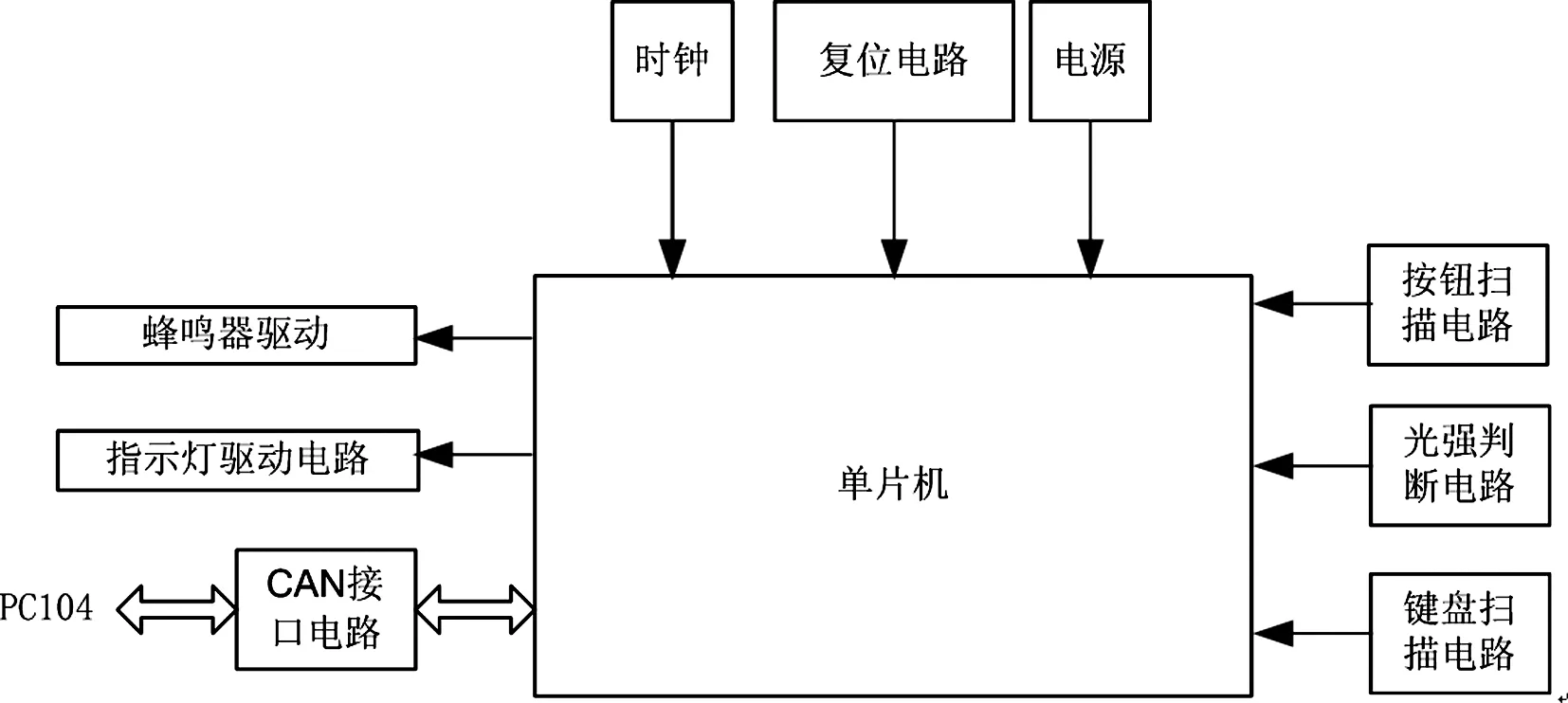
圖7 顯控電路板組成框圖
電源單元主要由一個大功率的開關電源組成,輸入交流220V、50Hz電源,輸出5V、15A和24V、5A兩種電壓等級的直流電,為顯控盒、主控箱供電。同時為顯示器、控制臺風機提供交流電源。
3.3.2供電箱設計
供電箱通過CAN總線接收通信板轉發PC104的控制指令,將220V交流電送到燈具驅動電路板,提供燈具的供電信號。供電箱的主控板電路也是一個基于單片機控制的系統,其硬件電路框圖如圖8所示。直流電源單元將交流220V電源轉換成直流5V,給單片機供電,單片機讀入控制命令后,輸出燈具驅動信號,控制燈具驅動電路為燈具供電。供電檢測電路將檢測到燈具供電狀態發給單片機,單片機通過CAN總線上傳給PC104單板機。
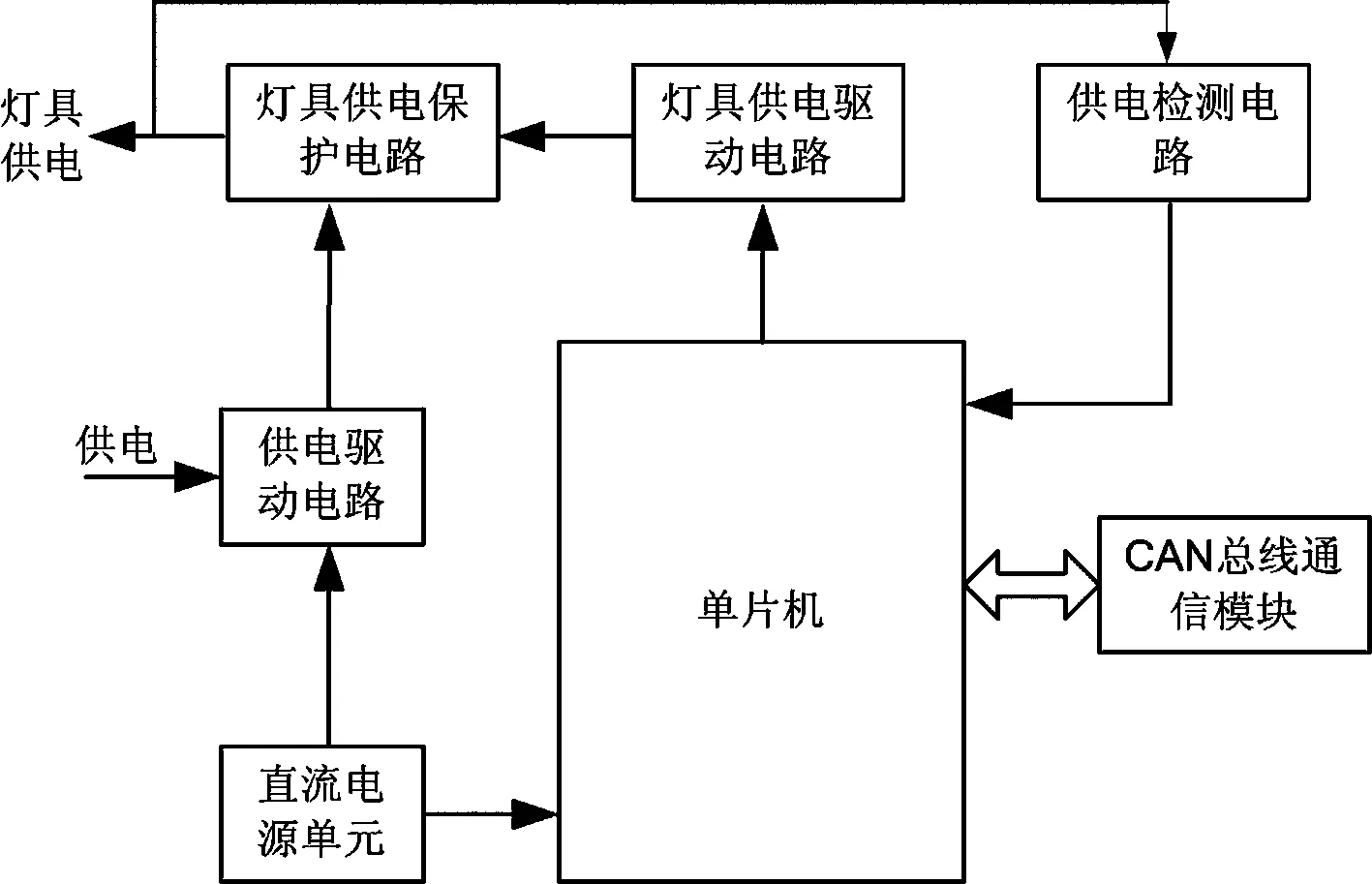
圖8 供電箱硬件原理框圖
針對所設計的硬件架構,編寫訓練管理臺、燈光控制臺、通信電路板、供電箱、燈具驅動電路板軟件,實現艦載機光學引導模擬訓練系統的裝置操作、流程演練、故障設置與診斷、操作示范教學、考核評定等多項功能。
4 結語
本模擬訓練系統用實物仿真與模擬場景相結合的方式,利用CAN總線監控網絡技術、網絡橋接技術和故障模擬技術,首次構建了集操作訓練與維修訓練于一體的艦載機光學引導操作維修訓練平臺,填補了新裝備訓練的空白。
[1] 曾凡明,陳于濤,胡錦暉.潛艇動力平臺訓練仿真系統總體設計與實踐[J].中國艦船研究,2012,12(6):78-85.
[2] 程剛,倪何,曾濤,等.基于支撐平臺的船舶動力模擬訓練系統研制[J].系統仿真學報,2009,21(23):7460-7463.
[3] 王曉雯.集散控制手自動操作站的仿真[J].電力學報,2007,22(3):356-358.
[4] FONG K Q, HODHOD A, SAKAMOTO D, et al. Integrated machinery control system operator training tools for the Canadian Navy[C]//11th Ship Control Systems Symposium. Southampton,UK,1997:357-371.
[5] ROZMYSLOWSKI J, KUCHARZEWSKI H G, BURG J. Simulation programmes for computer based training frigate 124(SIM/CBT F124)[C]//The Sixth International Naval Engineering Conference and Exhibition.UK, 2002:295-304.
[6] CORNATON F. Training simulator for la Fayette class frigate[C]//11th Ship Control System Symposium Southampton, UK,1997:403-416.
[7] SMIERZCHALSKIR. Simulation system for marine engine control room[C]//International Biennial Baltic Electronics Conference. Tallinn, Estonia,2008:978-983.
[8] 紀凱.艦艇通信一體化模擬訓練系統研究[J].艦船電子工程,2010,30(6):12-13.
[9] 余云智,程健慶,周玉芳.作戰指揮自動化系統模擬訓練技術研究[J].艦船電子工程,2008,28(7):118-122.
[10] 張治杰.基于VB測控裝備模擬訓練系統設計及實現[J].艦船電子工程,2012,32(5):12-13.
[11] 鄭麗敏.人工智能與專家系統原理及其應用[M].北京:中國農業大學出版社,2004:23-25.
Design and Implementation of Carrier Plane Optical Guiding Equipment Training Simulation System*
The carrier plane optical guiding equipment training simulation system is designed based on IPC, PC104 and MCU. The system employs can bus scrutiny, network bridge, fault simulation techniques, achieves multi-functions of simulation training.
optical guiding, training simulation system, design and implementation
2016年2月11日,
2016年3月20日
潘傳勇,男,碩士研究生,副教授,研究方向:艦載機引導裝備。張濤,男,博士研究生,講師,研究方向:艦面航空保障。黃葵,女,碩士研究生,副教授,研究方向:航空艦面保障。
TP391.9
10.3969/j.issn.1672-9730.2016.08.026
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
汽車維修與保養(2019年7期)2020-01-06 03:30:42
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
汽車維護與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年6期)2015-04-17 03:31:50
