輔助變量純方位目標跟蹤算法
2016-09-12 02:41:37婧1珺2李彩彩3李亞安1
西安電子科技大學學報 2016年1期
關鍵詞:方法
蔚 婧1,文 珺2,李彩彩3,李亞安1
(1.西北工業大學航海學院,陜西西安 710072;2.廣西大學計算機與電子信息學院,廣西南寧530004;3.西安電子科技大學電子工程學院,陜西西安 710071)
輔助變量純方位目標跟蹤算法
蔚 婧1,文 珺2,李彩彩3,李亞安1
(1.西北工業大學航海學院,陜西西安 710072;2.廣西大學計算機與電子信息學院,廣西南寧530004;3.西安電子科技大學電子工程學院,陜西西安 710071)
為克服偽線性估計方法在純方位目標跟蹤中估計參數的有偏性,提出了一種改進的輔助變量算法.該算法通過曲線擬合前幾個時刻的方位角測量序列來獲得當前時刻目標方位角的估計值,并將此作為輔助變量,通過最小二乘方法對目標參數進行估計,理論上可以獲得目標參數的無偏估計.針對單、雙觀測站兩種不同情況,推導出了系統觀測模型,并給出了具體實現步驟.仿真實驗的結果表明,與已有的研究相比,該算法具有更快的收斂速度和更高的估計精度,在工程實踐中具有廣泛的應用.
目標跟蹤;偽線性估計;輔助變量;控制理論
純方位跟蹤(Bearings-Only Tracking,BOT)是一種被動跟蹤方式,它只利用獲得的目標方位角信息來對目標運動參數進行估計,具有相當好的隱蔽性,近年來已成為我國跟蹤預警系統中的重要組成部分[1-2].量測方程的非線性和目標不完全可觀測性是純方位目標跟蹤存在的難點問題[3-5].
目前應用于純方位目標跟蹤的典型方法主要包括:極大似然估計器(Maximum Likelihood Estimator,MLE)[6-7],偽線性估計器(Pseudo-Linearing Estimator,PLE)[8-9],擴展卡爾曼濾波方法(Extended Kalman Filter,EKF)[10]等.其中,偽線性估計器是解決非線性估計的有效方法,它計算量小,便于工程實現,缺點是該方法會產生有偏估計,但由于其在工程上的實用性,仍然受到眾多學者的關注.為了消除偽線性估計器方法的有偏性,基于輔助變量的偽線性估計器算法被提出,它可以獲得理論上的無偏估計,其中核心問題是輔助變量的選擇.
在研究現有算法的基礎上,筆者提出一種改進的輔助變量構造方法.該方法通過曲線擬合前幾個時刻的方位角測量序列來獲得當前時刻目標方位角的估計值,并將此作為輔助變量,通過最小二乘方法估計目標參數,理論上可以獲得目標參數的無偏估計.
1 純方位目標跟蹤系統模型

分別為目標在t時刻位于X,Y軸方向上的坐標分量,vTx,vTy表示目標在X,Y軸方向上的速度分量.觀測站1位于坐標原點,觀測站2位于X軸上,觀測站間距為d,目標距坐標原點的初始距離為D0.
β1(k),β2(k)分別為觀測站1和觀測站2觀測到的方位角序列,以Y軸順時針旋轉0~2π:

由于存在“距離模糊”[4]的問題,僅依靠靜止單觀測站所獲得的目標方位信息,無法同時解算出目標的距離、航向、速度等全部參數.為了獲得目標的所有運動參數,必須使用兩個以上的觀測站,或者使觀測站機動.雖然單觀測站不能獲得目標的所有參數,但是卻可以獲得目標速度與初始距離的比值,在這種情況下,若對目標速度具有一定先驗知識,同樣可通過先驗知識對目標參數進行解算,實現完全觀測.為此,以下分別對單、雙觀測站的輔助變量偽線性估計算法進行分析.
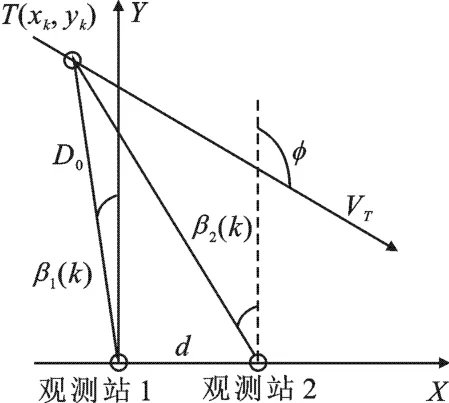
圖1 雙觀測站純方位目標跟蹤幾何關系示意圖
2 單觀測站輔助變量偽線性估計算法
以圖1中位于坐標原點的觀測站為例進行分析.在任意時刻j,有



將式(2)代入式(3),可得

其中,ξj=sin(β1(j)-β1(0));εj為等效的測量誤差.
定義目標狀態矢量X0=[vTxD0,vTyD0]T,并將式(4)改寫成矩陣形式,可得偽測量方程為



其中,可得式(5)的最小二乘解為

對式(8)取數學期望,得

可知式(8)為有偏估計,為此引入輔助變量來消除有偏估計.可選取上式的最優輔助變量估計,為


采用最小二乘曲線擬合算法,利用前3個時刻測量的方位角β1(j-3),β1(j-2),β1(j-1),進行n次曲線擬合.由于擬合的精度并不正比于擬合曲線的次數,并且考慮到每次觀測的時間間隔較短,因此在實際應用中選取二次曲線擬合.
設β1(j-3),β1(j-2),β1(j-1)確定了如下的二次曲線:

其中,a0,a1,a2為多項式系數.
3 雙觀測站輔助變量偽線性估計算法


同理,可以得到


其中,rij表示在j時刻目標與觀測站i的徑向距離.由式(15)得到偽線性測量方程為


其中,
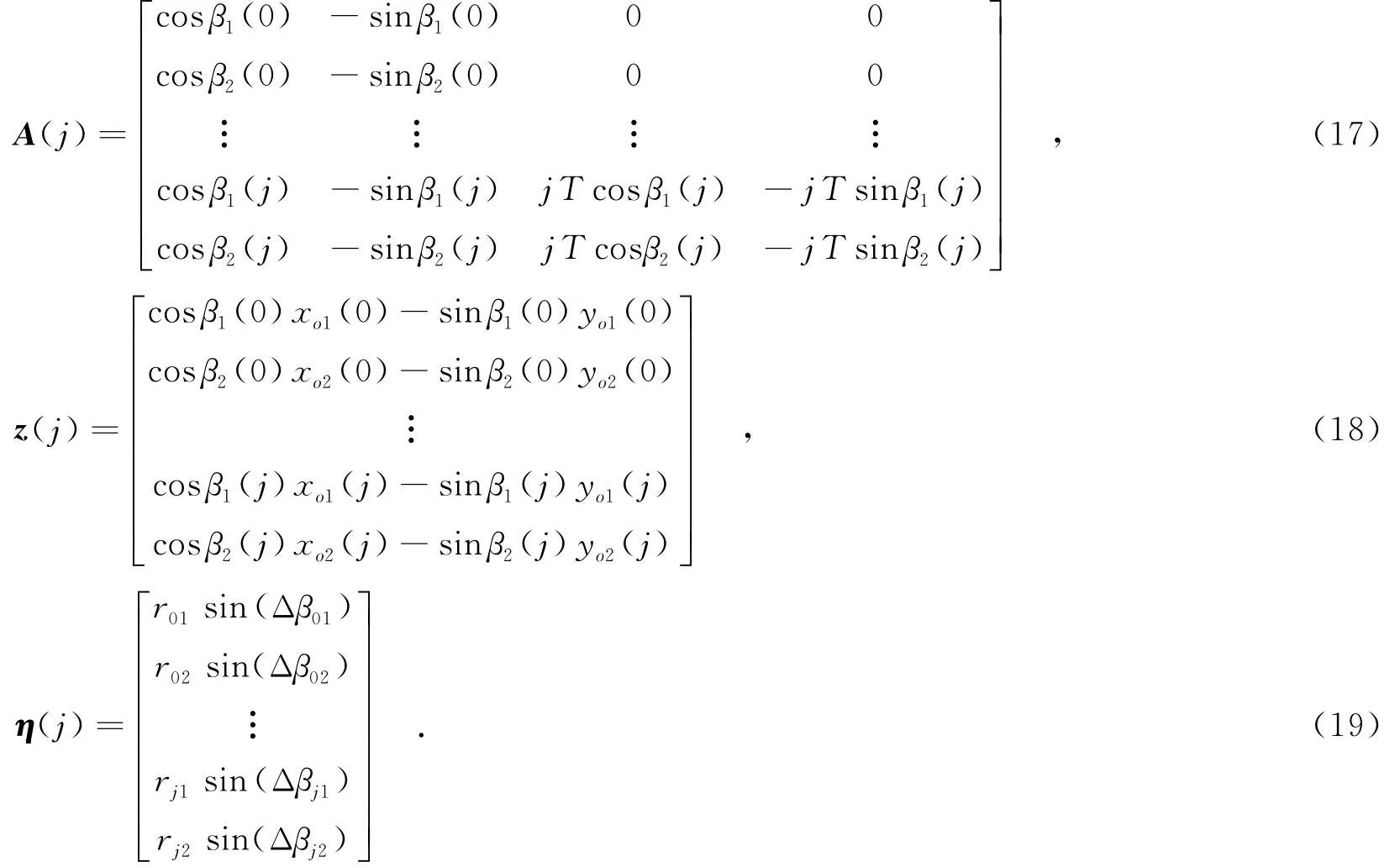
同理,可得基于輔助變量的最小二乘估計為

4 計算機仿真與分析
為驗證上述方法的有效性,進行了計算機仿真實驗,具體參數如下:目標速度V=10 m/s,目標航向?=140°,目標與坐標原點的初始距離D0=40 km,初始方位角β1(0)=30°,采樣周期T=1 s.每條曲線均經過40次蒙特卡羅實驗獲得.
4.1單觀測站情況
觀測站靜止于坐標(0,0)處,觀測噪聲的均方差Δβ1=2°.由于靜止單站對目標的觀測屬于不完全觀測,因此只能獲得目標速度與初始距離的比值.為了對估計結果進行定量分析,引入均方誤差進行比較.
圖2比較了用筆者提出的方法和文獻[8]中的方法構造輔助變量獲得目標參數估計值的均方誤差曲線.從圖2(a)和圖2(b)對目標速度與初始距離的比值估計可以看出,筆者提出的方法只需十幾次采樣就可獲得參數的穩定估計,而文獻[8]中的方法則需要50次左右的采樣才可以達到穩定估計,而且均方誤差也較文獻[8]中的方法有所降低.圖2(c)為目標航向角均方誤差曲線,可以看出筆者提出的方法無論是收斂速度還是估計精度均優于文獻[8]中方法的.
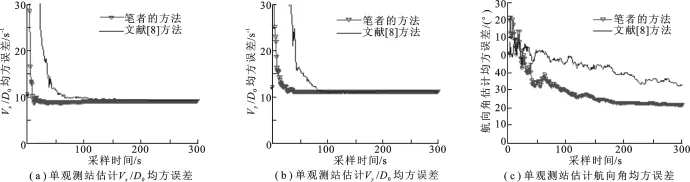
圖2 單觀測站估計均方誤差
4.2雙觀測站情況
觀測站分別靜止于(0,0)和(500,0)處,觀測噪聲的均方差Δβ1=Δβ2=2°.由于雙觀測站可以實現對目標的完全觀測,圖3分別給出了兩種方法對目標參數估計的對比.
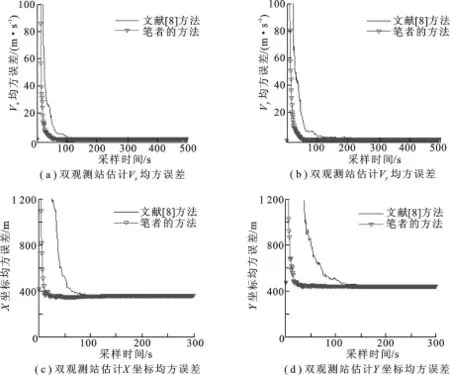
圖3 雙觀測站估計均方誤差
從仿真結果可以看出,與單觀測站情況類似,筆者提出的方法獲得的目標參數估計值均能快速收斂到穩定值,而且具有較低的估計誤差,便于在工程應用中快速對目標進行定位.
5 總 結
筆者結合純方位觀測的系統模型,提出了一種改進的基于輔助變量的純方位目標跟蹤方法.該方法通過曲線擬合前幾個時刻的方位角測量序列獲得當前時刻目標方位角的估計,并作為輔助變量,得到目標參數的最小二乘估計,可獲得理論上的無偏估計.筆者針對單、雙觀測站的不同情況,對算法的具體實現步驟進行了推導.仿真實驗表明,筆者提出的方法相較于文獻[8]中的方法具有更快的收斂速度和更小的估計誤差,便于快速實現對目標的準確定位,在工程實踐中具有重要的應用價值.
[1]NORTHARDT E T,BILIK I,ABRAMOVICH Y.Bearings-only Constant Velocity Target Maneuver Detection via Expected Likelihood[J].IEEE Transactions on Aerospace and Electronic Systems,2014,50(4):2974-2988.
[2]周紅波,萬福,蔡祥.基于改進Rao-Blackwellized粒子濾波的WSN被動目標跟蹤[J].火力與指揮控制,2015,40 (6):44-47. ZHOU Hongbo,WAN Fu,CAI Xiang.Passive Target Tracking Using Modified Rao-blackwellized Particle Filter[J]. Fire Control&Command Control,2015,40(6):44-47.
[3]胡子軍,張林讓,趙珊珊,等.組網無源雷達高速多目標初始化及跟蹤算法[J].西安電子科技大學學報,2014,41 (6):25-30. HU Zijun,ZHANG Linrang,ZHAO Shanshan,et al.Joint Initialization of High-speed Targets via Multistatic Passiveradar Measurements and Its Tracking Algorithm[J].Journal of Xidian University,2014,41(6):25-30.
[4]許志剛,盛安冬.二維單站純方位運動目標跟蹤的可觀測性[J].兵工學報,2007,28(5):617-620. XU Zhigang,SHENG Andong.Observability for Two-dimensional Single Observer Tracking Based on Bearing-onlyMeasurements[J].Acta Armamentarii,2007,28(5):617-620.
[5]時銀水,姬紅兵,楊柏勝.組網無源雷達變數目多目標跟蹤算法[J].西安電子科技大學學報,2010,37(2):218-223. SHI Yinshui,JI Hongbing,YANG Baisheng.Multiple Passive-radar Based Time-varying Number Targets Tracking [J].Journal of Xidian University,2010,37(2):218-223.
[6]FONG L W.Multi-sensor Track-to-track Fusion Using Simplified Maximum Likelihood Estimator for Maneuvering Target Tracking[C]//2007 IEEE International Symposium on Industrial Electronics.Piscataway:IEEE,2007:36-41.
[7]NIU R X,BLUM R S,VARSHNEY P K,et al.Target Localization and Tracking In Noncoherent Multiple-input Multiple-output Radar Systems[J].IEEE Transactions on Aerospace and Electronic Systems,2012,48(2):1466-1489.
[8]石章松,劉忠,王樹宗.一種單站純方位目標跟蹤算法研究[J].系統工程與電子技術,2005,27(2):349-352. SHI Zhangsong,LIU Zhong,WANG Shuzong.Study of the Single Platform Bearing-only Target Tracking Algorithm [J].Systems Engineering and Electronics,2005,27(2):349-352.
[9]CHAN Y T,RUDINCK S W.Bearings-only and Doppler-bearing Tracking Using Instrumental Variables[J].IEEE Transactions on Aerospace and Electronic Systems,1992,28(4):1076-1083.
[10]CHEN J G,WANG N,MA L L,et al.Extended Target Probability Hypothesis Density Filter Based on Cubature Kalman Filter[J].IET Radar,Sonar&Navigation,2015,9(3):324-332.
(編輯:郭 華)
Modified instrumental variable method for bearings-only target tracking
YU Jing1,WEN Jun2,LI Caicai3,LI Ya’an
(1.College of Marine Science and Technology,Northwestern Polytechnical Univ.,Xi’an 710072,China;2.School of Computer&Electrical Information,Guangxi Univ.,Nanning 530004,China;3.School of Electronic Engineering,Xidian Univ.,Xi’an 710071,China)
To overcome the biased estimation of the pseudo-linear algorithm in bearings-only target tracking,a modified instrumental variable algorithm is proposed.In the new algorithm,the current bearings-only estimation angle is acquired by polyfitting several previous bearings angles.Then the estimated angle is used as the instrumental variable to get the motion parameters by applying the leastsquare method.The algorithm can achieve the theoretical unbiased estimation.Simulation results illustrate that the new modified instrumental variable algorithm has a better convergence rate and estimation accuracy than the existing research and that it is more suitable for engineering practice.
target tracking;pseudo-linear estimation;instrumental variable;control theory
TN953
A
1001-2400(2016)01-0167-06
10.3969/j.issn.1001-2400.2016.01.030
2015-05-06
國家自然科學基金資助項目(51409214,51179157,61461007)
蔚 婧(1982-),女,講師,E-mail:yujing@nwpu.edu.cn.
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
