家用純電動(dòng)汽車(chē)的總體設(shè)計(jì)與分析
2016-09-19 12:27:12劉曉紅賈梓鑌段治軍
裝備制造技術(shù) 2016年6期
關(guān)鍵詞:汽車(chē)設(shè)計(jì)
劉曉紅,賈梓鑌,段治軍
(廣西制造系統(tǒng)與先進(jìn)制造技術(shù)重點(diǎn)實(shí)驗(yàn)室廣西大學(xué)機(jī)械工程學(xué)院,廣西南寧530004)
家用純電動(dòng)汽車(chē)的總體設(shè)計(jì)與分析
劉曉紅,賈梓鑌,段治軍
(廣西制造系統(tǒng)與先進(jìn)制造技術(shù)重點(diǎn)實(shí)驗(yàn)室廣西大學(xué)機(jī)械工程學(xué)院,廣西南寧530004)
采用傳統(tǒng)汽車(chē)的設(shè)計(jì)方法設(shè)計(jì)了一款適合家用、上班代步的純電動(dòng)汽車(chē)。通過(guò)類(lèi)比初步確定純電動(dòng)汽車(chē)的部分參數(shù)。利用UG NX進(jìn)行汽車(chē)總體設(shè)計(jì)(包括H點(diǎn)設(shè)計(jì)、2D人體模型設(shè)計(jì)、座椅線(xiàn)設(shè)計(jì)、手伸范圍、鏡像認(rèn)證等),確定汽車(chē)最終參數(shù),繪制汽車(chē)車(chē)身輪廓圖。利用MATLAB進(jìn)行操縱動(dòng)力學(xué)建模,對(duì)汽車(chē)進(jìn)行操縱穩(wěn)定性校合,驗(yàn)證了電動(dòng)汽車(chē)的可靠性。
純電動(dòng)汽車(chē);總體設(shè)計(jì);UG NX;動(dòng)力特性
隨著我國(guó)經(jīng)濟(jì)發(fā)展水平快速提高,新能源汽車(chē)的開(kāi)發(fā)與利用成為了汽車(chē)產(chǎn)業(yè)中的一個(gè)重點(diǎn)研究方向。相比于傳統(tǒng)汽車(chē),純電動(dòng)汽車(chē)以電動(dòng)機(jī)及其控制系統(tǒng)取代了內(nèi)燃式汽柴油發(fā)動(dòng)機(jī)動(dòng)力系統(tǒng),省去發(fā)動(dòng)機(jī)、變速器、油箱、冷卻系統(tǒng)和排氣系統(tǒng)等裝置,同時(shí)簡(jiǎn)化了底盤(pán)中的傳動(dòng)系統(tǒng),具有污染小、成本低、高能量轉(zhuǎn)換效率等優(yōu)點(diǎn)。目前國(guó)內(nèi)外的電動(dòng)汽車(chē)的研究已取得了一定的進(jìn)展,但未具備大規(guī)模推廣純電動(dòng)汽車(chē)的基礎(chǔ)[1]。
汽車(chē)總體設(shè)計(jì)是在滿(mǎn)足車(chē)身造型要求下,對(duì)電機(jī)、驅(qū)動(dòng)裝置、懸架機(jī)構(gòu)等總成,油箱、電器設(shè)備、備胎等部件,車(chē)身內(nèi)飾總成和部件等所在的位置,以及車(chē)身室內(nèi)空間大小、行李箱尺寸和車(chē)身等主要技術(shù)參數(shù)設(shè)計(jì)確定的過(guò)程[2-4]。采用傳統(tǒng)汽車(chē)的設(shè)計(jì)方法設(shè)計(jì)一款適合家用、上班代步的純電動(dòng)汽車(chē),主要包括汽車(chē)形式的選擇、主要參數(shù)的確定、UG NX汽車(chē)車(chē)身布置設(shè)計(jì)以及汽車(chē)操縱穩(wěn)定性校合。
1 汽車(chē)形式的選擇和主要參數(shù)的確定
1.1汽車(chē)車(chē)身形式和結(jié)構(gòu)形式的選擇
轎車(chē)車(chē)身的基本形式包括折背式、直背式和艙背式三種。發(fā)動(dòng)機(jī)排量在1.0 L以下的轎車(chē),主要采用艙背式車(chē)身。根據(jù)設(shè)計(jì)對(duì)象,確定類(lèi)型為乘用車(chē),將電動(dòng)汽車(chē)類(lèi)比于發(fā)動(dòng)機(jī)排量在1.0 L的smart for two轎車(chē),車(chē)身形式選用艙背式[5]。
由于設(shè)計(jì)的電動(dòng)汽車(chē)總質(zhì)量較小,因此采用兩軸形式,選擇4×2驅(qū)動(dòng)。同時(shí)為了使汽車(chē)軸荷合理分配、獲得較大的行李空間,選用電機(jī)前置的驅(qū)動(dòng)方式。
1.2整車(chē)參數(shù)
設(shè)計(jì)的家用的純電動(dòng)汽車(chē),參數(shù)的選擇類(lèi)比于發(fā)動(dòng)機(jī)排量在1.0 L的smart for two轎車(chē)。按照選擇的汽車(chē)結(jié)構(gòu)形式和發(fā)動(dòng)機(jī)排量,初步確定汽車(chē)的軸距為1 860 mm,輪距為1 280 mm,根據(jù)汽車(chē)總長(zhǎng)La=軸距L/C,選定比例系數(shù)C為54%,得出全長(zhǎng)尺寸初步計(jì)算,根據(jù)總寬Ba=(La/3)+195 mm±60 mm得出全寬尺寸初步計(jì)算[2],如表1所示。
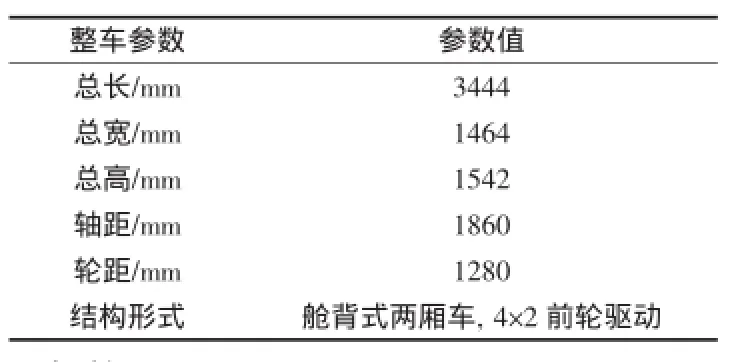
表1 整車(chē)參數(shù)
1.3質(zhì)量參數(shù)
根據(jù)電動(dòng)汽車(chē)的用途、載客人數(shù)以及載物質(zhì)量,綜合考慮汽車(chē)的整備質(zhì)量、裝載質(zhì)量和總質(zhì)量。同時(shí)因采用電機(jī)前置前輪驅(qū)動(dòng),所以前軸的軸荷應(yīng)大于后軸。選定其它的質(zhì)量參數(shù),如表2所示。

表2 質(zhì)量參數(shù)
1.4性能參數(shù)
通常用來(lái)評(píng)定汽車(chē)的性能指標(biāo)主要有:動(dòng)力性、能源經(jīng)濟(jì)性、制動(dòng)性、操控穩(wěn)定性、舒適性以及通過(guò)性等[6]。根據(jù)參考設(shè)計(jì)要求和國(guó)家法規(guī)標(biāo)準(zhǔn),設(shè)計(jì)純電動(dòng)汽車(chē)的動(dòng)力性參數(shù)為最高車(chē)速≥80 km/h;能源經(jīng)濟(jì)性參數(shù):百公里能耗10 kW·h/km,預(yù)計(jì)續(xù)駛里程180 km;整車(chē)的通過(guò)性參數(shù):最小轉(zhuǎn)彎直徑≥7.5 m,最小離地間隙≥0.18 m,接近角20°,離去角22°,縱向通過(guò)半徑8 m;操縱穩(wěn)定性參數(shù):不足轉(zhuǎn)向特性2°,車(chē)身側(cè)傾角3°,制動(dòng)點(diǎn)頭角1°.
1.5輪胎的確定
選取的輪胎應(yīng)為子午線(xiàn)輪胎。查閱GB/T2978—2008(轎車(chē)輪胎規(guī)格、尺寸、氣壓與負(fù)荷),根據(jù)設(shè)計(jì)要求確定輪胎的各個(gè)參數(shù)[3]:輪胎規(guī)格175/65 R14,負(fù)荷指數(shù)82,新胎斷面寬度177 mm,新胎外半徑584 mm,滾動(dòng)半徑284 mm、靜負(fù)荷半徑267 mm,充氣壓力250 kPa,負(fù)荷能力475 kg.
2 UG NX汽車(chē)總體布置設(shè)計(jì)
汽車(chē)總體布置(General Packaging)是幫助設(shè)計(jì)者進(jìn)行汽車(chē)總體設(shè)計(jì)的工具,主要解決汽車(chē)總體設(shè)計(jì)過(guò)程中的難點(diǎn),如人機(jī)工程、視野校核、發(fā)動(dòng)機(jī)跳動(dòng)等[7]。
2.1 H點(diǎn)設(shè)計(jì)
以男女乘員比例為50﹕50的A類(lèi)車(chē)輛為設(shè)計(jì)模型,運(yùn)用UG NX軟件中H點(diǎn)設(shè)計(jì)工具創(chuàng)建駕駛室內(nèi)的關(guān)鍵參考點(diǎn),包括每個(gè)乘坐位置的座椅參考點(diǎn)(SGRP)、腳踏板踵點(diǎn)(AHP)、腳心點(diǎn)(PRP)等。同時(shí)依據(jù)座椅參考點(diǎn)定義,確定相應(yīng)的腿長(zhǎng)參數(shù)為:大腿456 mm、小腿459 mm,設(shè)計(jì)目標(biāo)靠背角度為22°,目標(biāo)腰部支持0°,目標(biāo)座墊角度為15°,座椅偏轉(zhuǎn)角0°,生成的H點(diǎn)模型如圖1所示。
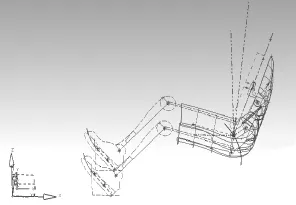
圖1 生成的H點(diǎn)模型
2.2 2D人體模型
根據(jù)所生成的H點(diǎn)模型初步設(shè)計(jì)相應(yīng)人體模型姿勢(shì)參數(shù),通過(guò)駕駛姿勢(shì)檢測(cè)和運(yùn)動(dòng)副角度檢測(cè)并進(jìn)行設(shè)計(jì)校核,完成參數(shù)設(shè)定如表3所示,創(chuàng)建符合SAE標(biāo)準(zhǔn)的2D人體模型,包括人體軀干的各主要部分,并產(chǎn)生由SGRP、AHP、SWC(方向盤(pán)中心點(diǎn))構(gòu)成的“人體三角形”,如圖2所示。

表3 人體模型姿勢(shì)參數(shù)
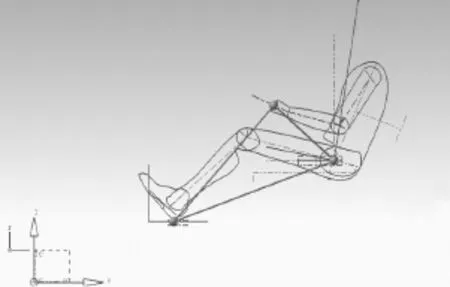
圖2 2D人體模型結(jié)果
2.3手伸范圍
汽車(chē)車(chē)身設(shè)計(jì)的一條重要原則是:駕駛室內(nèi)的一切手操作鈕件、開(kāi)關(guān)、桿件等的位置均應(yīng)在駕駛員手伸及界面之內(nèi)。根據(jù)SAE J287標(biāo)準(zhǔn)要求,運(yùn)用UG NX軟件中手伸范圍設(shè)計(jì)工具創(chuàng)建表示駕駛員最大手伸范圍的輪廓面,完成參數(shù)設(shè)定,系統(tǒng)生成手伸范圍的輪廓面,結(jié)果如圖3所示。
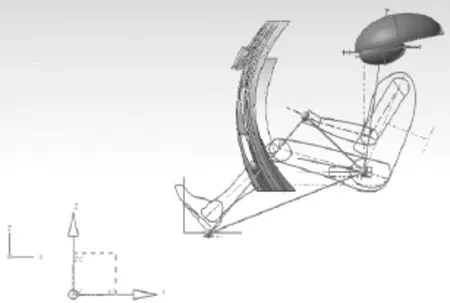
圖3 伸手范圍結(jié)果示意圖
2.4眼橢球
眼橢球是指不同身材的駕駛員按自己的意愿將座椅調(diào)整到適宜位置,并以正常的駕駛姿勢(shì)入座后,他們眼睛位置在車(chē)內(nèi)坐標(biāo)系中的統(tǒng)計(jì)分布圖形。眼橢球主要應(yīng)用于人機(jī)工程中關(guān)于視野的校核,如擋風(fēng)玻璃、后視鏡、儀表板等的視野校核。其參數(shù)設(shè)定如圖4、表4所示。
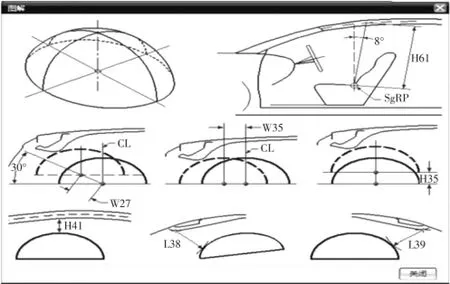
圖4 頭輪廓和間隙圖例
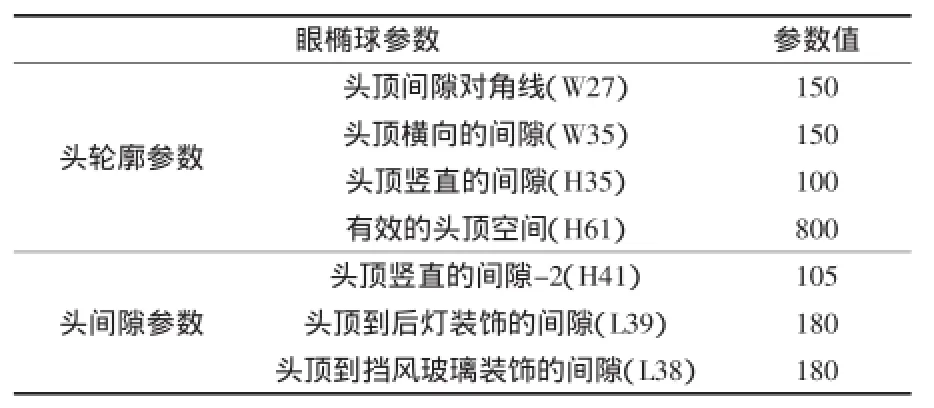
表4 眼橢球參數(shù)
2.5其余參數(shù)的確定
儀表板可見(jiàn)度功能使人們能夠根據(jù)方向盤(pán)和開(kāi)關(guān)控制桿的尺寸,計(jì)算機(jī)動(dòng)車(chē)儀表板的可見(jiàn)和不可見(jiàn)區(qū)域。使用此功能能夠在車(chē)輛設(shè)計(jì)的早期階段確定方向盤(pán)及其開(kāi)關(guān)控制桿是否符SAE J1050a的建議,其中方向盤(pán)設(shè)計(jì)圖解如圖5所示。
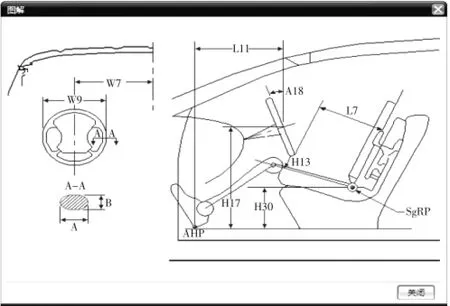
圖5 方向盤(pán)設(shè)計(jì)圖解
此外,運(yùn)用車(chē)輛設(shè)計(jì)工具包再進(jìn)行地毯和膝部間隙、后視圖和門(mén)口尺寸、座椅尺寸、安全帶固定裝置等的設(shè)計(jì),得到汽車(chē)的初步參數(shù)。
2.6汽車(chē)車(chē)身輪廓圖的繪制及最終參數(shù)的確定
經(jīng)過(guò)UG NX進(jìn)行內(nèi)部總體設(shè)計(jì)后,畫(huà)出汽車(chē)車(chē)身輪廓圖,如圖6所示。并獲得最終的設(shè)計(jì)數(shù)據(jù),如表5所示。
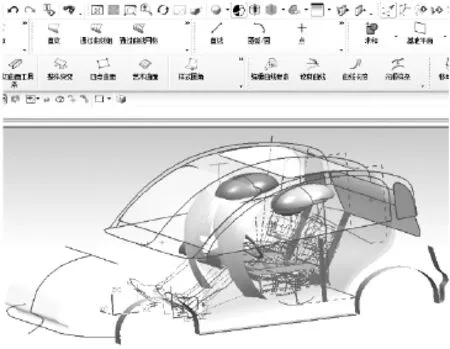
圖6 車(chē)身輪廓圖
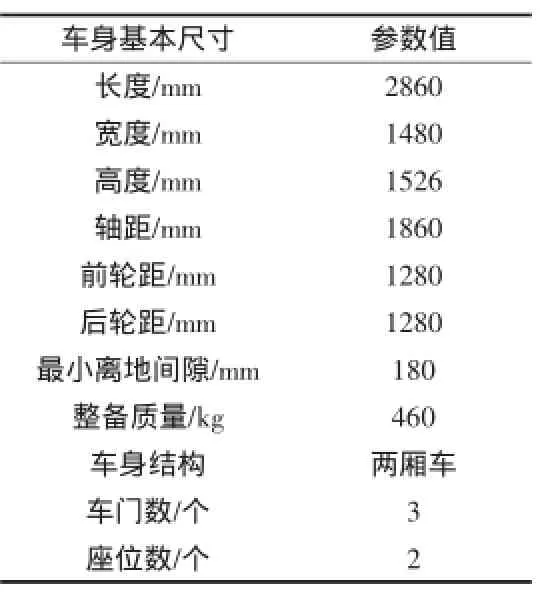
表5 汽車(chē)車(chē)身尺寸參數(shù)
3 動(dòng)力特性分析
汽車(chē)的操縱穩(wěn)定性與汽車(chē)行駛時(shí)的瞬態(tài)響應(yīng)有著密切的關(guān)系,通常采用轉(zhuǎn)向盤(pán)角階躍輸入下的瞬態(tài)響應(yīng)來(lái)反映汽車(chē)的操縱穩(wěn)定性。根據(jù)最終參數(shù),基于MAT LAB對(duì)汽車(chē)進(jìn)行操縱動(dòng)力學(xué)建模[6],得出角階躍輸入下的橫擺角速度時(shí)域響應(yīng),如圖7所示。由圖7可見(jiàn),對(duì)于執(zhí)行上的誤差,經(jīng)過(guò)計(jì)算,其超調(diào)量為129%.而汽車(chē)進(jìn)入穩(wěn)態(tài)所經(jīng)歷的時(shí)間大致為0.6 s.表明汽車(chē)在36 km/h的速度下行駛時(shí),其在時(shí)間上的滯后很短,說(shuō)明轉(zhuǎn)向響應(yīng)迅速、及時(shí)[8-9]。

圖7 角階躍輸入下的橫擺角速度時(shí)域響應(yīng)
4 結(jié)束語(yǔ)
類(lèi)比于傳統(tǒng)汽車(chē)的設(shè)計(jì)方法,提出了一種純電動(dòng)汽車(chē)的簡(jiǎn)易設(shè)計(jì)方案,對(duì)純電動(dòng)汽車(chē)的總體設(shè)計(jì)做了創(chuàng)新應(yīng)用。在UG NX軟件中完成了汽車(chē)車(chē)身總體布置設(shè)計(jì)和最終參數(shù)匹配與校核的工作,并基于MAT LAB對(duì)汽車(chē)進(jìn)行操縱動(dòng)力學(xué)建模,對(duì)汽車(chē)操縱穩(wěn)定性進(jìn)行了評(píng)估。設(shè)計(jì)的家用純電動(dòng)汽車(chē),其設(shè)計(jì)要求和各項(xiàng)參數(shù)符合相關(guān)法規(guī)及設(shè)計(jì)手冊(cè)的設(shè)計(jì)標(biāo)準(zhǔn),尤其是利用UG NX軟件進(jìn)行汽車(chē)總體設(shè)計(jì)和參數(shù)匹配與校核,對(duì)以后純電動(dòng)汽車(chē)的設(shè)計(jì)提供參考。
[1]張翔,趙韓,張炳力,等.中國(guó)電動(dòng)汽車(chē)的進(jìn)展[J].汽車(chē)研究與開(kāi)發(fā),2004,(1):77-79.
[2]王望予.汽車(chē)設(shè)計(jì)[M].北京:機(jī)械工業(yè)出版社,2004.
[3]黃曉云.汽車(chē)總體設(shè)計(jì)專(zhuān)家系統(tǒng)的研究與開(kāi)發(fā)[M].沈陽(yáng):東北大學(xué)出版社,2007:105-127.
[4]黃曉云,張鳳賜,張國(guó)忠,等.基于現(xiàn)代化技術(shù)的汽車(chē)總體設(shè)計(jì)參數(shù)選擇方法[J].中國(guó)工程機(jī)械學(xué)報(bào),2004,2(1):69-74.
[5]劉齊茂.汽車(chē)車(chē)架的結(jié)構(gòu)優(yōu)化設(shè)計(jì)[J].機(jī)械設(shè)計(jì)與制造,2005,(4):1-3.
[6]劉清虎,郭孔輝.動(dòng)力參數(shù)的選擇對(duì)純電動(dòng)汽車(chē)性能的影響[J].湖南大學(xué)學(xué)報(bào),2003,S1:62-64.
[7]周定陸,杜子學(xué).汽車(chē)總體布置應(yīng)考慮的問(wèn)題[J].汽車(chē)研究與研發(fā),2001,(02):23-26.
[8]陳桂明.應(yīng)用MATLAB建模與仿真[M].北京:科學(xué)出版社,2001:55-58.
[9]高大威,振華,青春.基于MATLAB的燃料電池汽車(chē)動(dòng)力系統(tǒng)仿真7[J].系統(tǒng)仿真學(xué)報(bào),2005,17(8):55-59.
The OverallDesign and Analysis ofHousehold Pure Electric Vehicles(PEV)
LIU Xiao-hong,JIA Zi-bin,DUAN Zhi-jun
(Guangxi Key Laboratory of Manufacturing System&AdvancedManufacturing Technology,School ofMechanical Engineering,Guangxi University,Nanning 530004,China)
Based on the designingmethods of traditional automobiles,a Pure Electric Vehicles(PEV)suitable for family to work was designed.Some parameters of pure electric vehicle were initially identified by using themethod of analogies.And the final parameters of the car were determined by the overall design on UG NX(including the design of H point,2D Manikin,seat line design,the certification scope of hand,mirror image,and tire envelope,etc.),then plot the auto body contours.And use MATLAB tomanipulate dynamicsmodeling,to verify vehicle’s handling and stability,ensure the reliability of the electric car.
pure electric vehicles(PEV);overall design;UG NX;dynamic characteristics
U469.72
A
1672-545X(2016)06-0007-04
2016-03-16
廣西制造系統(tǒng)與先進(jìn)制造技術(shù)重點(diǎn)實(shí)驗(yàn)室基金項(xiàng)目(項(xiàng)目號(hào):13-051-09S07)。
劉曉紅(1980-),女,廣西博白人,碩士,副教授,碩士生導(dǎo)師,主要研究方向:機(jī)械結(jié)構(gòu)強(qiáng)度學(xué)、材料加工工程。
猜你喜歡
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
汽車(chē)與安全(2019年9期)2019-11-22 09:48:03
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
兒童時(shí)代·快樂(lè)苗苗(2017年7期)2018-01-24 18:28:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
作文大王·低年級(jí)(2016年4期)2016-04-18 00:24:37
決策探索(2014年21期)2014-11-25 12:29:50
舒適廣告(2008年9期)2008-09-22 10:02:48

- 裝備制造技術(shù)的其它文章
- 微機(jī)原理與單片機(jī)技術(shù)課程一體化教學(xué)改革研究
- 基于“項(xiàng)目引領(lǐng)、任務(wù)驅(qū)動(dòng)”的《船機(jī)維修技術(shù)》課程教學(xué)研究與實(shí)踐
- 基于加裝過(guò)載保護(hù)裝置的PROTOS70卷接機(jī)組平準(zhǔn)器傳動(dòng)改進(jìn)
- 回轉(zhuǎn)系統(tǒng)的加載系統(tǒng)設(shè)計(jì)
- 多級(jí)齒輪傳動(dòng)的風(fēng)電齒輪箱耦合非線(xiàn)性動(dòng)力學(xué)模型的創(chuàng)建研究
- 高速鐵路換軌裝置方案研究