基于PC和控制板卡的4D影院動感座椅控制系統的研究
2016-09-19 12:27:14陳潤六王紅州鄭小民鄒曉暉王云鴿趙峰惠
裝備制造技術 2016年6期
關鍵詞:設備
陳潤六,王紅州,鄭小民,鄒曉暉,王云鴿,趙峰惠
(1.江西省機械科學研究所,江西南昌330002;2.江西工業職業技術學院,江西南昌330002)
基于PC和控制板卡的4D影院動感座椅控制系統的研究
陳潤六1,王紅州1,鄭小民1,鄒曉暉1,王云鴿1,趙峰惠2
(1.江西省機械科學研究所,江西南昌330002;2.江西工業職業技術學院,江西南昌330002)
介紹了一種基于PC和控制板卡的4D影院動感座椅控制系統,闡述了該系統的硬件結構、工作原理、功能特點等。系統由電動缸作為執行機構,采用以STM 32為主處理器的控制板卡、施耐德交流伺服驅動器、位移傳感器和VR眼鏡實現閉環反饋控制和提升用戶體驗度,具有穩定性好、成本低廉、規模化和智能化等優點。
4D動感座椅;STM 32;電動缸;VR眼鏡
隨著電影技術和數字技術的發展,先是引起了一股3D電影的熱浪,而在近些年來,4D動感電影又將取代3D電影成為新的一種觀感體驗。這種特殊的電影是將虛擬現實(VR)技術、計算機網絡智能控制技術、自動化控制技術和電影藝術相結合的高科技系統工程[1]。目前,國內展覽館、博覽館和科技館等眾多場所都紛紛推出這種集成了當今最新科技的參與性娛樂設施,并且以D-BOX為首的院線級動感座椅也已流行于各大國外市場[2]。
當然,D-BOX類和傳統的體驗式動感座椅有很大區別。普通體驗式動感座椅除了安裝動感效果較差的座椅外還配備了花樣繁多的感觀效果,如前座噴水噴氣、掃腿、背部錘擊、煙霧和墻面吹風等;而D-BOX類則專注于動感座椅的用戶體驗和電影畫面與動作無縫匹配所帶來的感觀升華效果。本文所介紹的就是課題組設計的一種新型的用于院線級4D廳的低成本動感座椅及其控制系統,為4D動感電影在國內的院線普及提供了新的動力。
1 動感座椅的機械結構
目前國內外的動感影院采用的動感座椅有三自由度動感座椅和六自由度動感平臺兩種,三自由度動感座椅可模擬升降、俯仰和擺動三個自由度性質的運動,六自由度動感平臺則可以模擬六自由度所有的動作。六自由度動感平臺設備由于其結構限制,在影廳內一般只布置一套,而一套設備上可安裝的座椅數目一般不超過30個,因此,六自由度動感平臺設備應用于規模較小的影廳。三自由度動感座椅則不受限制,一個影廳可隨意布置任意數量的座椅設備,一般一個三自由度動感座椅可安裝兩個座位,影廳可根據需求安裝一定數量的三自由度動感座椅設備。隨著動感影院規模的擴大,一個影廳安裝的三自由度動感座椅設備數目也隨之增加,但設備數目的增加也加大了控制難度且成本很高。因此,設計了一套以3-PR(4R)R并聯機構為動力輸入、3-RCU并聯機構為運動輸出的動感座椅設備,該套設備的座椅運動性能與市場上3-RPS并聯機構式的動感座椅完全相同,而且可以實現一套輸入帶動多套座椅同時同步運動,如圖1所示。其與六自由度動感平臺相比,該設備具有座椅數目可任意布置的優點,與3-RPS并聯機構式動感座椅相比該設備具有在布置較多數量座椅的情況下需要控制的主動支鏈非常少的優點。另外,該設備的驅動單元非常少,所以成本更低。3-RPS并聯機構式動感座椅的驅動部分安裝在支鏈上,因此,此類設備的每條支鏈上都需要安裝一套驅動裝置與一套傳動裝置,這就造成設備較為復雜,且成本較高。課題組研發的動感座椅設備采用3-RCU并聯機構取代3-RPS并聯機構,這兩種并聯機構具有相同的運動性能,而3-RCU并聯機構的支鏈采用圓柱副C與虎克鉸U的組合形式替代了3-RPS并聯機構支鏈中的移動P與球鉸S的組合形式,取消球鉸可以降低設備的加工難度并提高設備的承載能力。3-RCU并聯機構的驅動為3-PR(4R)R并聯機構的動平臺,因此,其三條支鏈都是無驅動的支鏈,與主動支鏈相比具有結構簡單、制造與裝配難度小的優點。
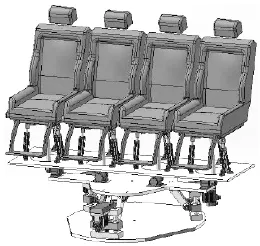
圖1 動感座椅機械結構Solidworks仿真圖
2 控制系統的組成和工作原理
4D動感座椅的控制系統一般由幾個部分構成:上位計算機、控制部分、伺服系統和傳動系統。其中,控制部分根據不同的控制器可以分為多個類型的控制方式,有PC+PLC系統、PC+運動控制卡系統、嵌入式系統和單片機系統等。其中,PLC因受工作方式的限制,被控電機不可以在高頻下工作,而這恰恰是動感座椅實現細膩動態模擬所需要的關鍵性能,一般用于點位控制和單軸運動[3];運動控制卡系統主要采用DPS(digital signal processor)控制器作為核心,其運動數據處理能力強大,是目前國外運動控制領域常見的一種方式,但運動控制主板昂貴,需選用的附件板卡也較多,主要適合于各種不同新機構的調試;而基于通用微處理器的控制系統,速度快、低功耗、芯片集成度高,完全能夠滿足產品級動感座椅的性能要求。
而如果按照動力源的不同則可將動感座椅分為液壓動力傳動、氣壓動力傳動和伺服電機傳動座椅。其中,采用氣壓動力傳動的動感座椅,具有運動速度不穩定、負載較小的缺陷;而采用液壓動力傳動雖然負載大,但是運動速度較慢,且有漏油等缺陷。因此,采用伺服電機傳動的座椅比前兩種方法綜合性能更好[4]。
2.1控制器的選擇
開發的控制板卡選用的主處理器的是意法半導體公司(ST)開發的STM32F407,其是基于ARM CortexTM-M4內核的32位閃存的微處理器,主頻高達168 MHz,具備高性能的信號處理和浮點運算能力。ARMCortex-M4采用單周期32或64位乘法累加(MAC)指令、優化的單指令多數據流(SIMD)運算、飽和運算指令和一個符合IEEE 754標準[53]的單精度浮點單元(floating point unit,FPU)。制作的控制板卡如圖2所示。

圖2 以STM 32為主處理的控制板卡
2.2伺服系統
本文采用施耐德Lexium 23A交流伺服驅動裝置和上海贏浩機電設備有限公司生產的電動缸。Lexium23A交流伺服驅動裝置的特點概述如下:給定值的2通道模擬輸入端(+/-10V)和脈沖接口;通過集成HMI(裝有調試軟件的PC)進行調試;Jog、電子齒輪、內部位置模式、速度控制和力拒控制運行模式;通過CANopen通訊控制。
伺服電動缸是將伺服電機與絲杠一體化設計的模塊化產品,將伺服電機的旋轉運動通過絲杠轉換成直線運動,同時將伺服電機最佳優點精確轉速控制、精確轉數控制、精確扭矩控制轉變成精確速度控制、精確位置控制、精確推力控制,實現高精度直線運動系列的全新革命性產品。
2.3工作原理
用Microsoft Visual Studio 2010應用程序開發環境編寫出PC用戶界面,讀取預先編制好的VR眼鏡的視頻動作編碼,通過以太網將命令發送給STM32控制板卡,經過D/A模塊轉換后,輸出模擬量信號給交流伺服驅動器,驅動電動缸工作,最終得到不同的動感座椅特效動作。采用帶位移反饋的閉環控制是系統所必須的,由位移傳感器進行實時采樣得到的各缸當前位置經A/D模塊轉換后反饋給STM32控制板卡,如圖3所示。

圖3 控制系統結構框圖
3 通訊方式和軟件設計
3.1通訊方式
本文采用CANopen總線用于控制板卡與交流伺服驅動裝置的通訊。CANopen協議是由CiA協會針對CAN協議的不完整性而定義出的一個更高層次的協議——應用層協議。一個CANopen設備模塊可分為3部分,如圖4所示。通信接口和協議軟件用于提供在總線上收發通信對象的服務;不同CANopen設備間的通信都是通過交換通信對象來完成的,這一部分直接面向CAN控制器進行操作。對象字典描述了設備使用的所有數據類型、通信對象和應用對象;對象字典位于通信程序和應用程序之間,用于向應用程序提供接口。應用程序對對象字典進行操作,即可實現CANopen通信。它包括功能部分和通信部分,通信部分通過對對象字典進行操作實現CANopen通信,而功能部分則根據應用要求來實現[5,6]。

圖4 CANopen設備模型
在CANopen網絡系統中每個節點都有唯一的一個對象字典,而且每個節點的對象字典都具有相同的結構,但具體的內容要根據不同的設備而定,包含了描述該設備及其網絡行為的所有參數。CANopen協議還定義了4種報文(通信對象),用于對不同作用的信息進行處理,分別為管理報文(NMT)、服務數據對象(SDO)、過程數據對象(PDO)和預定義報文或特殊功能對象。
3.2軟件設計
控制板卡的開發環境是Keil公司開發的MDKARM集成開發平臺,將可用于三軸、四軸、六軸的控制算法集成到卡內,便于用戶進行二次開發。它適用于基于Cortex-M系列、Cortex-R4等處理器的嵌入式設備的完整開發平臺,為微處理器應用設計提供一個完善的C/C++開發環境,具有行業內領先的ARM C/C++編譯工具,帶有較小封裝的實時操作系統Keil RTX,帶有μVision4 IDE、調試器和仿真環境,符合Cortex微控制器軟件接口標準CMSIS等功能特點。
PC程序采用Microsoft Visual Studio 2010應用程序開發環境,其是微軟公司面向計算機軟件編程人員開發的一套可視化的高效集成環境,是目前最常用的Windows平臺應用程序開發環境之一[7,8]。利用其自帶的MFC編程向導工具編寫C++應用程序,簡化了應用程序的開發過程并提高了編程效率,上下位機采用UDP通信協議,下位機固定IP:192.168.0.125,端口號:5000,標志位55,下位機接受數據結構體如下:
注:對于三自由度,取前面三個姿態即可。
typedef struct
{
BYTEmCheck;//標志位(默認為55)
BYTE mCmd;//上位機命令
BYTEmAct;//(默認為0)
BYTEmRev;//(默認為0)
floatmDOFs[6];//六個姿態(α,β,γ,X,Y,Z)
floatmVxyz[6];//速度(默認值為0)
floatmAxyz[3];//加速度(默認值為0)
}DataToDOF;
注:角度姿態(α,β,γ)單位為度,位移姿態(X,Y,Z)單位為米。
下位機接受命令如下:
{
mCmd=0,//正常發送運動參數
mCmd=2,//控制平臺回到中立位
mCmd=4,//平臺切換到工作態
mCmd=6,//平臺由底位上升到中立位
mCmd=7,//平臺由中立位落到底位
mCmd=8//保留
};
上位機固定IP:192.168.0.131,端口號:10000,標志位55,上位機接受數據結構體如下:
typedef struct
{
BYTEmCheck;//標志位
BYTE status;//下位機狀態
BYTE mAct;//特效(默認為0)
BYTEmRev;//保留(默認為0)
float attitude[6];//下位機實際姿態
float th_attitude[6];//下位機理論姿態
float para[6];//下位機狀態
}DataToUpper;
上位機接受命令如下:
enum NET_CMD
{
status=0,//平臺停止
status=1,//平臺正在回中位,此時不響應上位機命令
status=2,//平臺在中位
status=3,//工作態,可正常發送運動參數
3.3顯示器設備
本文采用的顯示器設備是VR(虛擬現實)眼鏡。VR技術是當今世界前沿學科之一,是國外國防高科技重點發展的關鍵技術,主要用于軍事和航空器視覺模擬等,近年來眾多國際大公司紛紛投入到VR民用領域。VR眼鏡具有沉浸性、交互性和構想性,使人們能夠沉浸其中,形成交互效能多維化的信息環境[9]。因而采用VR眼鏡作為體驗動感座椅動作特效對控制方法的檢驗是尤為關鍵的。VR眼鏡中配套的影片帶有動作編碼,將動作編碼導入到編寫好的PC軟件中,再由軟件的數據處理模塊得到各缸的運動數據即可實現動感座椅的實時動作。
4 結束語
本文研制的4D影院動感座椅控制系統以STM32為主處理器開發的控制板卡為基礎,采用了帶有位置反饋的閉環控制模式,既提高了系統運動控制的穩定性和可靠性,又保證了位置控制的精度。動感座椅能實現升降、俯仰和擺動三個自由度性質的運動,可以模擬電影中各種運動場景。采用VR眼鏡能夠提升用戶體驗度,從而增加用戶再次體驗的可能性。實驗表明:該系統工作穩定,成本低廉并與布置的座位數成反比,有非常大的市場應用潛力。
[1]趙暢,張嶸.三自由度動感電影系統研制[J].電氣自動化,2006,28(1):64-66.
[2]譚笑間.D_BOX動感座椅影院系統概述[J].現代電影技術,2012,55(2):34-36.
[3]盧冠軍.一種多核嵌入式PLC運動控制系統的研究[D].杭州:杭州電子科技大學碩士論文,2011:7-8.
[4]陳玉龍.基于PC和PLC的4D動感座椅控制系統的研發[D].濟南:山東建筑大學碩士論文,2014:2-3.
[5]卞亦文,吳仲誠,戈瑜.基于CAN總線的網絡傳感器的研究與實現[J].總線與網絡,2003,40(5):33-35.
[6]鄔寬明.CAN總線原理和應用系統設計[M].北京:北京航空航天大學出版社,1996:60-105.
[7]楊宇.飛行模擬器動感模擬關鍵技術研究[D].哈爾濱:哈爾濱工業大學,2010:4-7.
[8]黃植功.PC與PLC的串口通訊及編程實現[J].廣西物理,2007,28(3):35-38.
[9]蔣慶全.國外VR技術發展綜述[J].飛航導彈,2002,32(1): 27-341.
Research on ControlSystem of4-D Cinema Motion Seat Based On PC and ControlBoard
CHEN Run-liu1,WANG Hong-zhou1,ZHENG Xiao-min1,ZOU Xiao-hui1,WANG Yun-ge1,ZHAO Feng-hui2
(1.Jiangxi Institute of Mechanical Science,Nanchang Jiangxi 330002,China;2.Jiangxi Industry Polytechnic College,Nanchang Jiangxi330002,China)
This paper introduced a control system of 4-D cinema dynamic seat based on PC and control board.The hardware structure,working principle and functional characteristics of control system are discussed in this paper. System consists of electric cylinder as the executing agency,while using STM32-based processor control board,Schneider AC servo drive,the displacement sensor and VR glasses to realize closed-loop feedback control and enhance the user experience,with good stability,low cost,large-scale and intelligent and so on.
4-D dynamic;STM32;electric cylinder;VR glassesz
TP242
A
1672-545X(2016)06-0017-04
2016-03-01
江西省科技支撐課題:動感影院用特效座椅設備的研發(項目編號:20151BBE50125)
陳潤六(1987-),男,江西九江人,碩士,工程師,研究方向:機械裝備的設計及制造研究,機器人控制系統研究。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
當代工人(2020年13期)2020-09-27 23:04:20
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
電子制作(2018年10期)2018-08-04 03:24:48
家庭影院技術(2017年11期)2017-12-20 08:10:57
工業設計(2016年12期)2016-04-16 02:52:00
IT時代周刊(2015年8期)2015-11-11 05:50:37
汽車維修與保養(2015年1期)2015-04-17 03:25:28
設備管理與維修(2015年12期)2015-04-09 06:57:00
