混合動力履帶車輛機電復合制動力分配策略研究
2016-09-20 01:21:30曾慶含魏曙光馬曉軍
火炮發射與控制學報 2016年2期
曾慶含,魏曙光,魏 巍,馬曉軍
(1.裝甲兵工程學院 全電化技術實驗室, 北京 100072;2.裝甲兵工程學院 控制工程系,北京 100072;3.北京特種車輛研究所,北京 100072)
?
混合動力履帶車輛機電復合制動力分配策略研究
曾慶含1,2,魏曙光1,2,魏巍3,馬曉軍1,2
(1.裝甲兵工程學院 全電化技術實驗室, 北京100072;2.裝甲兵工程學院 控制工程系,北京100072;3.北京特種車輛研究所,北京100072)
為解決雙側電驅動履帶車輛復合制動問題,提出一種機械、電氣制動力模糊分配控制策略,通過制定以踏板信號和車輛行駛速度為輸入的模糊規則在線實時分配電氣、機械制動比例,并考慮電制動實際存在的約束,提高車輛復合制動匹配效果。其次,建立了整車驅動電機系統、機械制動系統以及車輛動力學實時仿真模型,進行了多種制動強度下的駕駛員在環的控制原型仿真試驗,仿真結果表明復合制動系統能夠在有效回收制動能量的同時,實現平穩制動。
電氣工程;混合動力;履帶車輛;機電聯合制動;模糊控制
相比傳統履帶車輛完全依賴機械制動裝置實現車輛減速、駐車制動,混合動力履帶車輛制動執行機構包括驅動電機和系統機械制動裝置兩部分,其中電氣制動時驅動電機處于發電狀態,將行駛時的部分機械能轉化為電能儲存在動力電池、超級電容等儲能設備中[1-3]。研究合理的制動力分配策略,能夠有效提高車輛能量利用率,延長續駛里程,此外由于履帶車輛質量大,緊急制動、長時間制動等工況下容易出現制動器磨損嚴重,導致制動效能下降等情況,采用機電復合制動能夠避免機械制動長時間、大力矩工作,保證制動器的可靠性,延長使用壽命[4]。
電氣制動能力受電機轉速、電池SOC等因素影響較大,且機械、電氣制動裝置響應帶寬存在差異,要實現二者輸出動力的合理匹配保證制動的緊急性、平順性,需要重點研究機電復合制動力矩分配控制策略[3-4]。
文獻[1,3]針對履帶車輛機電復合制動分別提出了基于制動力、速度分段的分配控制策略和作為模糊輸入的分配控制策略;文獻[4-5]針對輪式車輛分析了制動力分配對車輛行駛穩定性的影響;文獻[6]針對輪轂電機電制動特性進行了分析;文獻[7-8]針對液壓機械復合制動模糊分配策略進行了研究,對于本文具有一定借鑒意義。
筆者以某型雙側電驅動履帶車輛為研究對象,提出了一種基于踏板信號識別駕駛員意圖結合車輛行駛速度的模糊分配控制策略,基于硬件在環仿真平臺開展了多種制動強度的駕駛員-控制器硬件在環仿真試驗,驗證了制動力分配算法的有效性。
1 系統描述
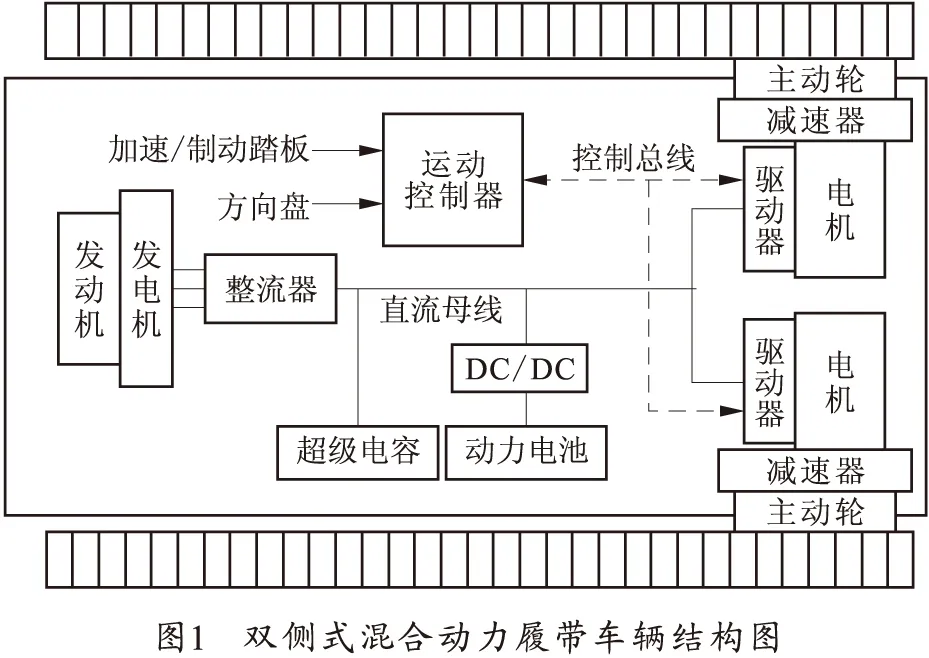
雙側式混合動力電傳動履帶車輛結構如圖1所示。發動機帶動發電機發電,經整流后變為高壓直流電,作為車輛主動力源,超級電容、高壓蓄電池并聯在直流母線上作為輔助動力源,二者共同提供驅動電機電能。車載運動控制器,根據駕駛員操控信號、反饋信號完成兩側驅動電機的目標轉矩計算,通過總線將目標轉矩信號實時發送至電機控制器。
基于車輛動力學理論,車輛行駛過程中除了受牽引力作用外,還受行駛阻力作用,主要包括滾動阻力、空氣阻力、加速阻力等。當車輛行駛在路面坡度為θ的硬路面上時,受力情況如圖2所示。
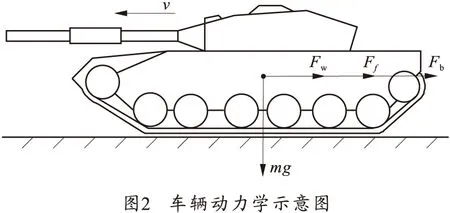
地面滾動阻力為
Ff=fmg
(1)
式中:f為滾動阻力系數;m為車輛質量。
空氣阻力為包括車輛行駛過程中所受的空氣摩擦阻力和壓力阻力,可用下式公式估算:
(2)
式中:CD為空氣阻力系數;v為車輛行駛速度;A為迎風面積,A=σBH,B為履帶中心距,H為全車高,σ為修正系數,在0.8~0.9之間。
加速阻力是車輛加速行駛時需要克服的慣性力
(3)
式中,δ為車輛質量增加系數。
車輛的質量增加系數可按下式計算:
(4)
式中:m1為履帶質量;jk為各旋轉部件轉動慣量;ik為第k個旋轉部件到主動輪的傳動比;r為主動輪半徑。
則可得車輛的總制動力需求為
(5)
由于驅動電機動態響應速度遠高于車輛動力學響應速度,算法設計過程中可以忽略其內部復雜電磁作用時間,只考慮機械時間常數,并重點關注電機轉矩輸入輸出能力上,其數學模型可采用電機轉速-轉矩特性曲線進行幅值約束,并采用一階慣性環節擬合電機動態響應時間的方法進行分析,電機實際輸出電磁轉矩為
(6)

(7)
筆者不深入研究液壓制動作用機理,采用面向對象的建模方法,模擬輸入輸出特性,其動態方程為
(8)
2 控制策略研究
電制動力的引入為提高車輛制動效率提供了可能,機電復合制動的分配控制,應該圍繞以下兩方面:
1)合理分配機械制動與再生制動的制動力,在不影響制動性能的前提下,力求盡可能多地回收能量,以增強車輛續航能力。
2)根據電氣制動力實時變化情況,在線動態調節機電復合制動分配系數,使制動踏板與制動力矩的近似成線性關系,提高車輛制動的平順性。
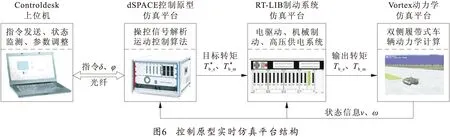
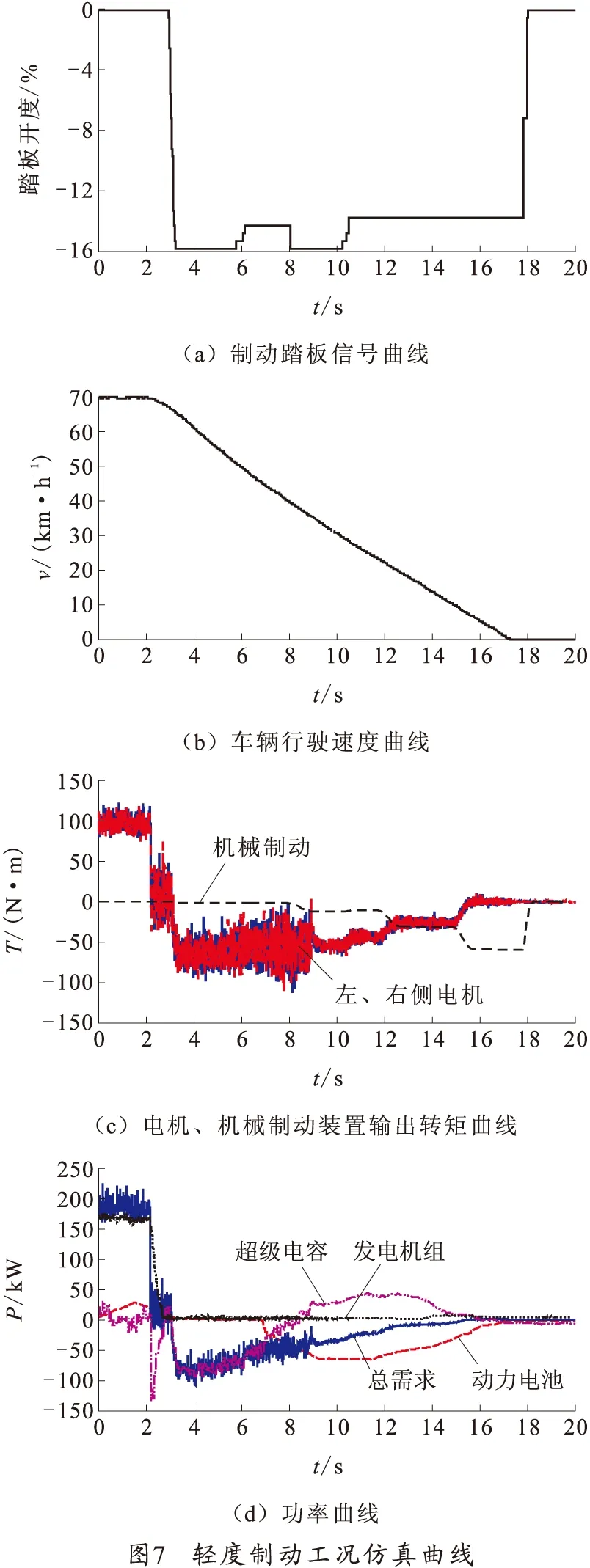
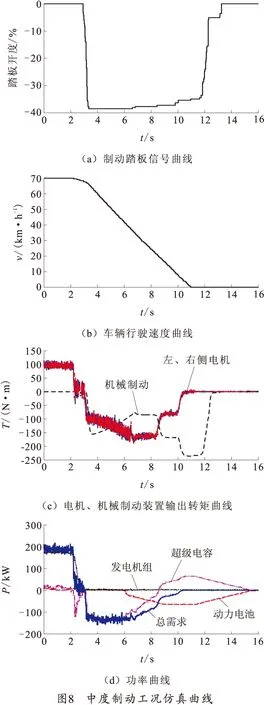
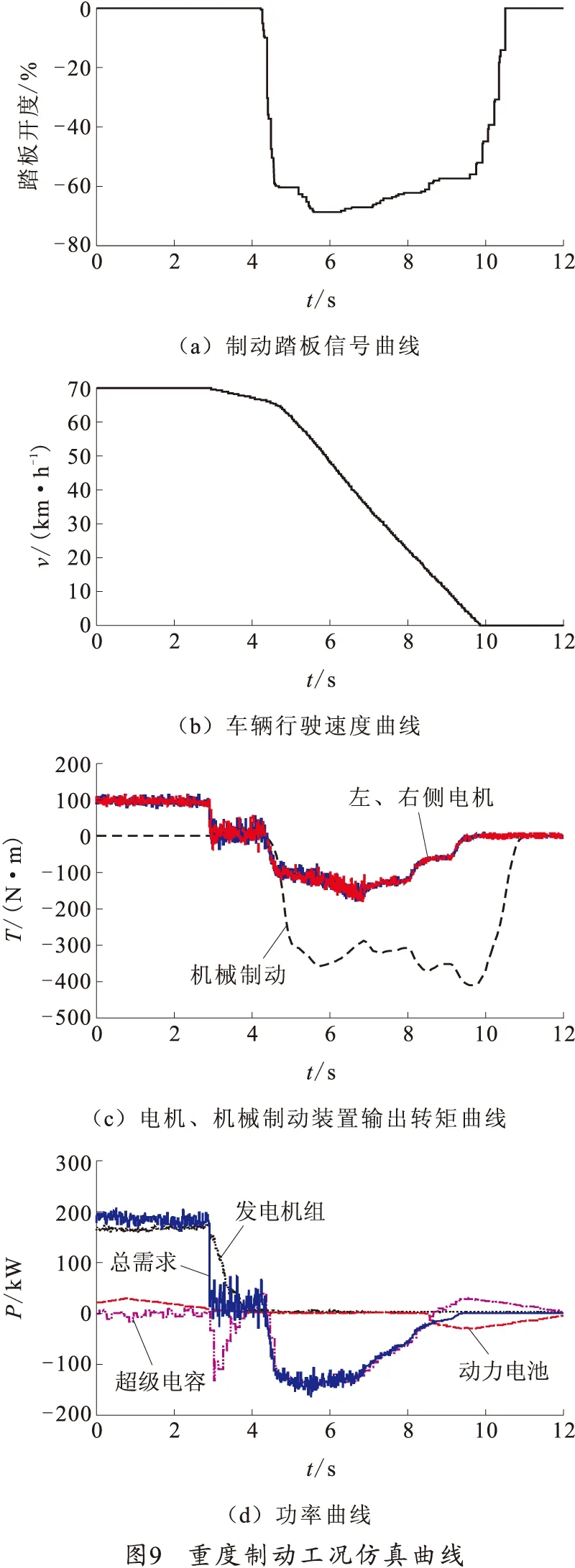
根據車輛制動強度,將制動分為緊急制動模式、中度制動模式和輕度制動模式。緊急制動時,當出現不可預見的緊急情況時,需要車輛緊急停車,此時應由制動器產生盡可能大的制動加速度使車輛迅速減速直至停車,目標制動強度大,一般z≥0.7;中度制動對應于車輛在正常行駛工況下的制動過程,制動強度0.1 除此之外,制動力分配還受車速因素影響,行駛速度較高時,機械制動摩擦劇烈,從延長機械制動器使用壽命出發,應該優先采用電氣制動,車速較低時,電氣制動能力減弱,此時應該主要采用機械制動實現車輛停車。 綜上所述,影響制動力分配的主要有踏板角度、車輛速度兩因素,考慮以此為輸入,采用模糊分配的方法,進行分配比例的動態調整,模糊控制規則如表1所示。 表1 制動力模糊分配規則表 模糊控制輸入輸出變量關系曲面如圖3所示。 規模型改造綜合模式就是結合一種或多種模式的優點,將礦冶文化遺產改造成為兼具多種功能的場所。經過改造的礦冶文化遺產多數具有旅游功能,且能產生較好的經濟效益,但這種改造往往會產生較大的變動,特別是對遺址內部會有很多改動,往往使一些礦冶文化遺產徒有其表,導致遺址部分文化內涵消失。因此,這種模式只適用于一般的近現代礦冶文化遺產。例如德國蓋爾森基辛德煉鋼廠被改造成一個大型的購物中心,工廠內部大規模的改動對礦冶文化遺產造成了一定的破壞。 值得說明的是,電機制動能力首先受電機轉速影響,轉速很低時無回收制動能力,隨著轉速的升高進入恒制動轉矩區,隨著轉速的進一步升高轉矩呈現下降狀態。轉矩-轉速函數Tmax_e(ω)變化曲線如圖4所示,圖中ωf0為轉折轉速。其次,受電池SOC影響,SOC值較高時,電池無法回收制動能量,電制動能力應該相應降低。 制定以下分配函數: Tmax_e(p,ω)=2h(p)Tmax_e(ω)i (9) SOC約束函數h(p)為 (10) 式中:pmax、pmin為允許充電的SOC范圍;p0為允許最大功率充電的SOC值。 期望制動力矩為 (11) 式中:δ為制動踏板行程;δmax為制動踏板最大有效行程;δ0為制動踏板最小有效行程;Tb_max為最大制動力。 電氣制動期望力矩為 (12) 機械制動期望力矩為 (13) 進而可得出總的制動力控制分配策略結構如圖5所示。 3.1實時仿真平臺的構建 為了驗證分配控制策略的性能,筆者構建了控制原型實時仿真系統,包括上位機、dSAPCE控制器仿真平臺、RT-LAB電驅動與高壓供電系統仿真平臺、Vortex動力學仿真平臺,如圖6所示。上位機基于Controldesk軟件界面通過光纖實現操控信號的給定、參數的在線調整;dSAPCE仿真平臺主要進行制動分配控制算法的實時仿真,計算機械電氣制動系統力矩,通過CAN總線發送至RT-LIB電驅動系統實時仿真平臺;RT-LIB主要計算輸出的驅動電機電磁轉矩、機械制動轉矩; Vortex多體動力學軟件仿真平臺主要進行履帶車輛的動力學計算,得到車輛的動力學響應,并通過PCI_CAN總線通行卡反饋至dSAPCE仿真平臺、RT-LIB仿真平臺,實現機械、電氣、控制系統的一體化聯合仿真[14],仿真參數如表1所示。 表1 車輛仿真基本參數 參數數值整車質量m/kg8000履帶接地長/m2.975履帶中心距/m1.985側傳動比i10.12主動輪半徑r/m0.25地面最大附著系數0.8滾動阻力系數0.05母線電壓/V550驅動電機額定功率/kw80驅動電機最大轉矩/(N·m)480驅動電機額定轉速/(N·m)3200額定轉矩/(N·m)254發電機功率/kw190電池容量/(A·h)50電池SOC0.7超級電容容量/F4.8 3.2仿真試驗 3.2.1輕度制動工況 輕度制動工況的仿真曲線如圖7所示。從7(a)可知,3 s時輕踩制動踏板開度至15%,并保持恒定直至18 s完全松開。由7(b)知整個制動時間大約為14.5 s。 加速踏板踩下速度較緩,系統識別為輕度制動,如7(c)所示根據制動力控制分配策略,制動過程主要以電氣制動為主,便于回收制動能量,降低機械摩擦制動的磨損,直至車速降至較低時,為了滿足車輛停車要求,機械制動力逐漸投入,車輛接近停車時,全部采用機械制動,與數字仿真相比,不同之處在于中高速行駛時,由于電機采用弱磁控制且輸出轉矩較低導致電氣制動力存在高頻脈動,可能影響制動的平順性。 由功率變化曲線7(d)可以看出,制動時超級電容最先吸收能量,母線泵升電壓至閾值以上時,動力電池進入充電模式以內,能夠抑制母線電壓過高。電池回收功率達到峰值65 kW,回收時間較長,實現盡可能多回收制動能量的控制目標。 3.2.2中度制動工況 中度制動工況的仿真曲線如圖8所示。從圖8(a)可知,3 s時輕踩制動踏板開度至約39%,直至12 s時松開。由8(b)知整個制動時間大約為8 s。 中度制動時,制動力矩需求較大,單獨依靠電氣制動力難以滿足制動需求,制動力分配曲線如圖8(c)所示,機械制動全程參與整個制動過程,其中高速階段電氣制動發揮主要作用,主電機恒功率工作區(對應車速30 km/h以上),電氣制動能力處于飽和狀態,能夠充分利用電制動回收能量。隨著車速的降低電氣制動回收能力減弱,機械制動逐漸起主要作用。 由功率變化圖8(d)可以看出超級電容率先投入吸收功率,母線泵升電壓至閾值以上時動力電池進入充電模式以內,開始回饋功率,其中制動前半段電氣制動強勁幾乎已滿功率制動,電池最大回收功率達到65 kW,能量回收率較高,母線電壓泵升速度較快,最高達585 V,但在允許波動范圍之內。 3.2.3重度制動工況 重度制動工況的仿真曲線如圖9所示。從圖9(a)可知,4 s時輕踩制動踏板開度至約68%,直至10 s時松開。由9(b)知整個制動時間大約為6 s。 圖9(c)為液壓制動力矩和電氣制動力矩變化 曲線,重度制動過程中,電氣制動率先投入使用且主要作用在中高速段,電氣制動響應時間比機械制動快0.3 s以上,一定程度上能夠提高制動響應速度,同時回收部分制動能量,但整個制動過程液壓制動所占比重較大,以確保可靠的制動停車。整個制動過程中,車速變化平穩,制動效果良好。 整個制動過程中的電氣功率的變化曲線如圖9(d)所示,可以看出制動時母線功率為負值,超級電容首先發揮作用回收能量,當母線電壓泵升至閾值以上時,動力電池投入使用進入充電狀態,部分能量再回收至電池中,表明超級電容在負載功率快速變化時,能快速吸收能量抑制母線電壓波動,保證驅動電機供電可靠。 綜合考慮電機制動能力、電池SOC狀態,提出了一種基于駕駛員踏板信號和車輛行駛速度雙輸入的模糊分配策略,實現機械、電氣制動力動態在線分配。 構建了控制原型仿真平臺,多種制動強度下的仿真結果表明:所設計控制策略,能夠實現混合動力履帶車輛機械、電氣制動力的協調分配,實現車輛的平穩、可靠制動以及能量的高效回收。 References) [1]李劍. 混合動力履帶車輛制動控制策略研究[D]. 北京: 北京理工大學,2009: 13-14. LI Jian.The study on brake control strategy of hybrid electric tracked vehicle[D]. Beijing: Beijing Institute of Technology, 2009: 13-14.(in Chinese) [2]宋世欣,王慶年,王達. 電動輪汽車再生制動系統控制策略[J]. 吉林大學學報:工學版, 2015,45(1):341- 346. SONG Shixin, WANG Qingnian,WANG Da.Control stra-tegy for regenerative braking system of in-wheel motor vehicle[J]. Journal of Jilin University :Engineering and Technology Edition,2015,45(1): 341-346. (in Chinese) [3]李峰,谷中麗,劉曉星. 混合動力履帶車輛機電聯合制動模糊控制策略研究[J].汽車工程學報, 2012, 2(3):221-227. LI Feng, GU Zhongli, LIU Xiaoxing. Study on electric-mechanical composite braking strategy based on fuzzy rules for hybrid tracked vehicle[J]. Chinese Journal of Automotive Engineering, 2012, 2(3): 221-227. (in Chinese) [4]張建龍, 殷承良, 張建武. 混合動力汽車機電復合制動控制系統研究[J]. 系統仿真學報,2009,21(16):5169-5178. ZHANG Jianlong, YIN Chengliang,ZHANG Jianwu. Research on braking control system for hybrid electric vehicle with electro-mechanical hybrid brake[J]. Journal of System Simulation, 2009,21(16): 5169-5178. (in Chinese) [5]張建龍. 混合動力汽車機電復合制動制動力分配與穩定性控制策略研究[D]. 上海:上海交通大學, 2009:51-57. ZHANG Jianlong. Study on electro-mechanical braking force distribution and stability control strategies for HEV[D]. Shanghai:Shanghai Jiaotong University, 2009: 51- 57. (in Chinese) [6]楊宇. 輪轂電機驅動電動汽車的電制動特性研究[D]. 長春:吉林大學, 2013: 65-74. YANG Yu. Research on electric brake characteristics of electric vehicle driven by hub-motors[D]. Changchun:Jilin University, 2013:65-74. (in Chinese) [7]滕飛, 呂建剛,李彥路. 基于效率優化的履帶車輛再生制動控制策略[J]. 農業機械學報,2012,43(2):11- 15. TENG Fei, LYV Jiangang, LI Yanlu. Control strategy for regenerative braking of tracked vehicle based on efficiency optimization[J]. Transactions of the Chinese Society for Agricultural Machinery, 2012, 43(2):11-15. (in Chinese) [8]趙廣俊, 呂建剛, 宋彬. 液壓混合動力履帶車輛聯合制動模糊控制[J]. 控制理論與應用,2010,27(12):1674-1680. ZHAO Guangjun, LYV Jiangang, SONG Bin. Fuzzy control of combined braking system in hydraulic hybrid tracked vehicle[J]. Control Theory & Applications, 2010, 27(12):1674-1680. (in Chinese). Study on Electric-mechanical Combined Braking Distribution Strategy of Hybrid Electrical Vehicle ZENG Qinghan1,2,WEI Shuguang1,2,WEI Wei3,MA Xiaojun1,2 (1.Laboratory of All-electrization Technology, Academy of Armored Force Engineering, Bejing100072,China;2.Department of Control Engineering, Academy of Armored Force Engineering, Bejing100072,China;3.Beijing Special Vehicle Institute, Beijing100072,China) For the achievement of the braking stability of dual-motor hybrid tracked vehicle with electric-mechanical combined braking system, the braking moment distribution method is proposed based on fuzzy principle. First, the fuzzy controller of braking moment distribution coefficient with accelerate pedal signal and drive velocity as input was designed. And the constraint of electric brake was taken into account for the improvement of matching performance. Then, the electrical drive system, mecha-nical brake system and vehicle dynamical real-time model were set up with the braking process simulated in different braking intensities. The simulation results indicate that the combined braking fuzzy control system can recover some braking energy and realize stable braking. electrical engineering; hybrid vehicle; tracked vehicle; electric-mechanical combined braking; fuzzy control 10.19323/j.issn.1673-6524.2016.02.010 2015-11-10 院校科技創新項目(12050005) 曾慶含(1988—),男,博士研究生,主要從事軍用車輛電氣工程研究。E-mail:cqh_zgy@163.com 魏曙光(1975—),男,副教授,主要從事車輛電源系統技術研究。E-mail:shuguang_wei@163.com TJ81 A 1673-6524(2016)02-0046-06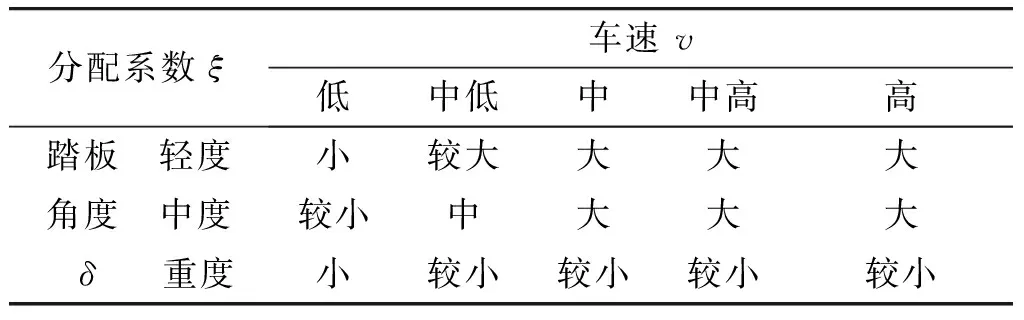
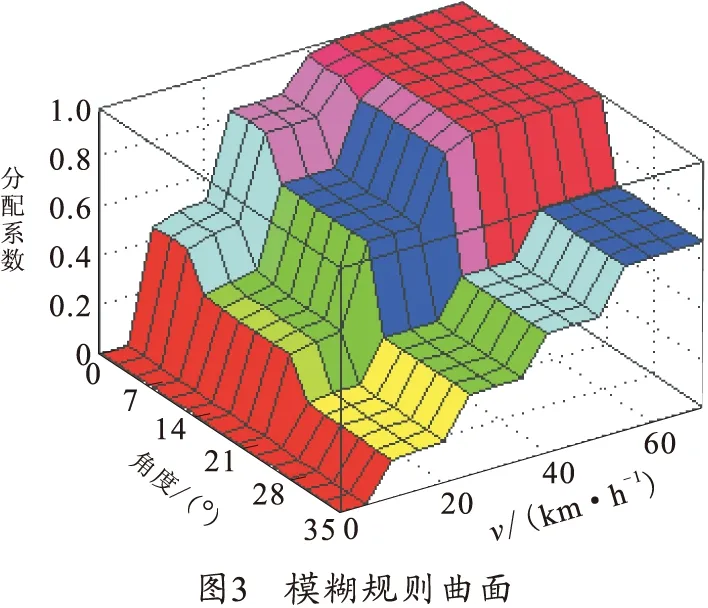
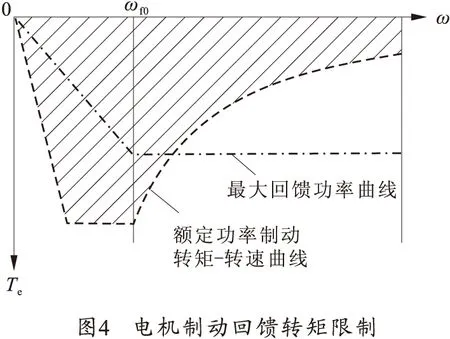
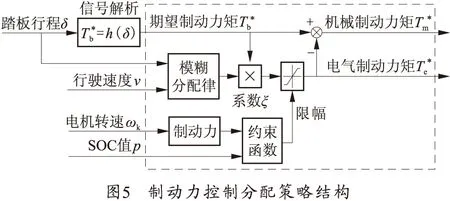
3 試驗驗證及分析

4 結論
猜你喜歡
車主之友(2022年6期)2023-01-30 07:58:16
能源工程(2020年6期)2021-01-26 00:55:22
鐵道通信信號(2020年9期)2020-02-06 09:15:22
黃河之聲(2019年23期)2019-12-17 19:08:43
汽車實用技術(2019年17期)2019-09-21 03:46:32
山東冶金(2019年3期)2019-07-10 00:54:04
數學大王·趣味邏輯(2019年5期)2019-06-13 20:27:43
小學科學(學生版)(2019年5期)2019-05-21 01:00:18
經濟技術協作信息(2018年30期)2018-11-22 06:20:24
消費導刊(2018年10期)2018-08-20 02:57:02