多軸多模式自動進樣器伺服控制系統的研制
2016-09-21 08:18:03陳世斌
分析儀器 2016年4期
關鍵詞:設計
陳 蓮 陳世斌
(1.中國政法大學 科學技術教學部,北京 100088;2.北京世能通宇科技有限公司,北京 100176)
?
儀器研制與改進
多軸多模式自動進樣器伺服控制系統的研制
陳蓮1陳世斌2
(1.中國政法大學 科學技術教學部,北京 100088;2.北京世能通宇科技有限公司,北京 100176)
針對標準型和平臺型兩種不同結構的自動進樣器,提出了采用共用平臺的小功率多軸伺服控制系統的實現方法,研發出一種低成本且兼容兩種自動進樣器的多軸直流有刷電機伺服控制系統。平臺化和模塊化的設計理念解決了快速設計與多品種、并行開發與低成本的矛盾。實驗結果為:兩種自動進樣器峰面積重復性RSD均≤1.5%,峰面積線性相關系數優于0.99,達到了課題指標要求。
伺服控制電機平臺氣相色譜自動進樣器
1 引言
1.1國內外現狀
目前已商品化的氣相色譜儀液體自動進樣器主要分為兩大類型:標準型(傳統)圓形樣品托盤旋轉運動機塔和平臺型樣品托盤X-Y-Z運動機塔[1-3]。近年來,多功能自動進樣器大多采用平臺型的設計,幾乎全部采用微步步進電機與運動控制組件構成的多軸伺服控制系統[1-3]。國外廠家也有全部采用全直流有刷電機控制的產品,具有代表性的如意大利的HT-300A[4]。
國內這方面的研發剛剛起步[5],近年來產品在精度和穩定性方面有所提高[6-9],控制部分均采用微步步進電機的設計,整體技術與國外中高端產品尚有較大差距。
1.2難點問題
如何快速設計、快速開發、快速制造、快速形成產品并具有優良的性價比,尤其是在整體資源不變的條件下,提出了標準型和平臺型兩種不同結構自動進樣器的并行實施研發的設想。因此,課題面臨諸多困難與挑戰,迄今為止國內外在該方面的研究與報導甚少。
2 研發思路
設計思路是:基于分散型控制與兼容性設計的方法,快速搭建起一個小功率多模式多軸伺服控制系統的共用研發平臺[10-14],通過步進電機與直流電機代換,組合集成一個新的系統,實現快速驗證與多目標的探索性實驗研究。最終通過結構的再設計,實現4軸直流有刷電機全反饋伺服控制系統,從而高效、快速地研發出兩種自動進樣器,整體達到課題規定的技術指標要求。
3 系統建立與討論
3.1自動進樣器的基本工作原理
自動進樣器的基本工作原理是:先將液體樣品預裝在幾個至上百個小玻璃瓶中,擺放在樣品托盤上,自動進樣器按照預設好的程序來控制注射器自動完成玻璃瓶中液體樣品的抽取,然后將樣品注射導入到氣相色譜儀進行分析。基本流程為:選擇第n個樣品瓶位→抽取樣品→注射樣品→清洗進樣器(針)→選擇第n+1個樣品,依次循環重復上述步驟直到結束。
3.2自動進樣器的結構與類型
從結構上劃分,自動進樣器分為兩大類:傳統圓形樣品托盤旋轉機塔型和平臺樣品托盤X-Y-Z方向運動機塔型[1-3]。
3.2.1標準型結構
標準型110個樣品位自動進樣器,樣品瓶托盤為圓盤式并側位放置,樣品托盤作圓周旋轉運動,從而實現瓶位的精確定位。機塔(外形結構似塔狀)包括3個運動方向,一是機塔作0°~60°的X軸向旋轉運動,分別實現注射器抽取樣品時的位置定位和注射樣品時色譜儀進樣口的位置定位;二是注射器拖車Y軸方向垂直上下運動,抽取樣品與色譜儀進樣口高度(注射器針插入深度)的定位;三是Z軸方向注射器的推拉桿(抽取預設體積)和注射器的推拉桿(樣品注射)運動,這是目前最為經典的設計。
3.2.2平臺型結構
平臺型結構自動進樣器分為兩種:一種是樣品平臺為X-Y軸方向運動,機塔為固定式(不旋轉),有的還配有移動式機械手。另一種是樣品平臺固定,機塔為X-Y-Z方向運動。后一種是目前的主流設計機型,其優點是:功能強大、通用性好、密度高且容易拓展,并具有吸附濃縮/熱解析、頂空、萃取等樣品前處理功能。缺點是:操作略顯復雜、體積較大。
3.3系統架構
分析兩種自動進樣器的架構,重點是運動部分(控制驅動電路和電機),它是自動進樣器的核心,下面以此進行論述。
標準型110個樣品位自動進樣器運動部分由1個圓形樣品托盤和3個機塔部分組成,分別為旋轉運動部件、注射器托車運動部件和注射器推拉桿運動部件。由此看出,110個樣品位的自動進樣器共由4個運動部件組成。平臺型自動進樣器分為兩種,一種是樣品平臺為X、Y方向運動,并含有兩個固定機塔(注射器托車和注射器推拉桿);另一種是樣品平臺為固定,機塔是X-Y-Z方向的4軸(Z方向2軸)運動,因此兩種方式都是4軸運動系統。
4 控制系統平臺設計
具體平臺設計目標是構建一個多模式、多軸伺服控制系統。多模式是指二相步進電機和直流有刷電機兩種控制模式;多軸是指4軸或4軸以上,以此搭建起一個組合與集成、兼容與互換、快速驗證與多目標的研發實驗平臺,實現兩種不同結構自動進樣器的快速研發。
4.1控制系統的構成
自動進樣器運動部分,實際上是一個典型的電機伺服控制系統。具體由運動控制器、光電隔離電路、電機驅動器、電機、位置反饋器件及附屬電路組成,基本控制原理如圖1所示。

圖1 伺服控制系統原理
設計的基本目標是將運動控制電路、光電隔離電路、電機驅動電路、檢測接收電路和電源電路及附屬電路整體集成為一個核心控制驅動模塊。通過與執行結構(電機、減速組件、絲杠等組件)和位置傳感器件構建起一個共用系統研發實驗平臺。
4.2控制模塊架構與控制策略
在平臺設計中,著重搭建多模式、多軸、分散型控制、兼容與互換為主要特征的共用平臺。自動進樣器的基本控制系統平臺,如圖2所示。
4.2.1多模式與多軸
平臺中實現兩種工作模式:二相步進電機模式和直流有刷電機模式,而多軸是指基本具備4軸基本配置或4軸以上的拓展能力。
4.2.2分散型控制
分散型控制是控制回路彼此“獨立”與“分散”的控制方法。該設計有三大優勢:一是4軸運動控制回路彼此完全獨立,即“危險”分散。具體每軸運動控制回路由一個控制器、光電隔離器和一個驅動器組成一個子系統,并對應一只被控電機(步進電機或直流電機),子系統如圖2虛線框所示。“分散”可有效解決多軸聯動與快速響應的問題;二是可以實現并行、快速與高效的開發;三是提高系統的穩定性與可靠性,尤其是對于24小時連續工作和安全要求高的系統或裝置。
圖2中上位PC機進行集中管理,下位機分散獨立控制。主控制器完成對4個控制子系統的任務調度與管理,下位機的主控制器通過RS232接口實現與上位PC機的信息交換。
4.2.3兼容與互換
核心控制驅動模塊、電機(直流有刷電機或二相步進電機)、傳感器(編碼器、霍爾元件)統一規格和型號,實現組件直接代換和兩種自動進樣器間的互換,軟件設計解決了兩種自動進樣器“共性”和“個性”的兼容問題。
4.2.4一體化控制驅動模塊
運動控制電路、光電隔離電路、電機驅動電路、檢測接收電路、電源電路及附屬電路整體集成為一個核心控制驅動模塊。具有小體積、大密度、可靠性高、低成本、易于安裝和維護等優勢。整體封裝后堅固且可嵌入,能適應野外特殊環境的應用。模塊化設計理念也是目前國際產品設計發展的主要方向和重點關注的熱點問題。圖2實線框中所表示的是一體化控制驅動模塊(下位機控制驅動模塊),虛線框中為4個獨立控制子系統,采用“點對點”的方式分別對應一個被控電機(M1~M4)。

圖2 自動進樣器的控制系統平臺示意圖
4.3運動控制器設計
4.3.1基本設計
運動控制器是以微處理器(MCU)為核心的功能組件,方案中涉及微處理器的選型、內部通訊總線的建立以及控制算法與控制策略等方面的問題。
首先討論微處理器,采用DSP是理想的方案,但價格偏高且貨源不穩定,8位、16位和32位微處理器各有特色,也是不錯的選擇,鑒于成本及應用問題最終選擇了ATMEL MCU AT89S52微處理器[15]。ATMEL MCU AT89S52是一種功能強大、低功耗的8位微控制器[15-22],具有優秀的性價比。
設計中采用了5塊ATMEL MCU AT89S52微處理器,其中4塊作為4軸“分散”型運動控制器的核心組件,通過對每塊微處理器的獨立編程完成相應控制,另外一塊作為主微處理器,負責4塊AT89S52的統一調度與通訊管理。RS232接口實現PC機與控制模塊之間的通訊,所有控制指令均由PC機通過此接口傳送到控制模塊中的主微處理器,經處理后發送到各子系統實現自動進樣器的工作流程,如圖3所示。
4.3.2高速SPI接口設計
采用多軸“分散”型控制方案,上位機與下位機之間的通訊、下位機中的主微處理器與4個從微處理器通訊也是本設計中的重點內容之一。
ATMEL MCU AT89S52芯片本身不支持多機通訊,當然技術上改造也是一種常用的手段,如采用RS485、I2C、CAN和SPI等。綜合通訊速率、成本和簡易性等因素,并結合自動進樣器的系統工作聯動、實時性與效率等特點,最終選擇了自創建SPI總線的設計方案[23-25]。SPI (Serial Peripheral Interface)接口,是Motorola公司提出的一種4線制同步串行外設總線接口,是具有高速(可達幾Mbps/s)、全雙工和同步的通信總線。最為關鍵的是,SPI為主/從(Master /Slave)模式架構,支持掛載多個SPI MCU設備,協議簡單易用。可在印刷電路板上直接布線,從而簡化電路設計,節省電路接口器件與纜線,使得系統更為穩定可靠,如今越來越多的芯片集成了這種通信接口。
基于SPI接口總線原理進行自構建,SPI接口中共有4根信號線,分別是:設備選擇線(CS)、時鐘線(SCLK)、串行輸出數據線(SDO)和串行輸入數據線(SDI)。
時鐘由主設備(Master)控制,在時鐘移位脈沖控制下,數據按位傳輸,高位在前,低位在后。確定一個主設備(Master),其他設備為從設備(Slave),主從設備間可實現全雙工通信[22-24]。
下面來論述用一個主設備與4個從設備實現主/從通訊的設計方法。在圖3中,主微處理器為主設備,我們對主微處理器P0口的P0.1~P0.7作如下定義:
SCLK:P0.1,時鐘線,計數器定時產生時鐘脈沖(頻率1MHz)
SDI:P0.2 數據輸入線
SDO:P0.3 數據輸出線
CS:P0.4~P0.7 (CS1- CS4)設備選擇線(低電平使能)
主微處理器P0口的P0.4~P0.7分別對應4個從微處理器P口的P0.0,如圖3所示。主微處理器與4個從微處理器(微處理器1~4)之間通訊為全雙工,速率最高為800kHz。
改進型的SPI串行通訊總線優良的性能保證了自動進樣器的旋轉機塔、樣品盤、小滑車、注射推桿4個子系統的聯動與實時性,實現了自動進樣器系統工作效率與實時的要求。
4.3.3控制算法和控制軟件
控制集中在主微處理器和各子系統的控制器中,包括:控制模式(二相步進電機和直流有刷電機)、電機的啟停、正反轉、提速和減速、高速與緊急制動及位置檢測與精確定位等。主微處理器負責工作模式、工作方式、控制流程,子系統控制器實現具體運動控制。
4.4電機驅動器設計
在多軸、多模式伺服控制實驗平臺中,多軸是保證自動進樣器4軸電機控制的基本要求,而多模式是針對步進電機與直流電機的兩種驅動工作方式,力求在一個平臺下實現兩種電機的通用與兼容應用。
4.4.1基本設計
目前最廣泛使用的H型全橋式電路,H橋電路作為驅動器的功率驅動電路。由于功率MOSFET是壓控元件,具有輸入阻抗大、開關速度快、無二次擊穿現象等特點,滿足高速開關動作需求。設計中采用L6205芯片作為驅動器核心,L6205芯片是雙H橋單電源-電壓控制,功耗小,單路最大驅動電流2.8A,一片L6205可以滿足一個二相步進電機或兩個直流有刷電機驅動。設計中使用4片L6205實現4軸2相步進電機或8軸直流有刷電機的運動控制,如圖2所示。單只電機最大功耗控制在1A以下,電機驅動電源通過外接24V電源實現。
設計中采用L6205芯片,該芯片具有雙H橋結構、單電源/電壓控制、功耗小和驅動輸出電流大等特點[26-29]。單片L6205可實現一個二相步進電機或兩個直流有刷電機驅動。4片L6205芯片則可掛載4個二相步進電機或8個直流有刷電機的驅動,單路最大驅動電流2.8A。
由于H橋由大功率N溝道增強型場效應管構成,不能由電機邏輯控制信號直接驅動,必須經驅動信號放大電路和電荷泵電路對控制信號進行放大,設計中采用電荷泵升壓技術將24 V升壓至48V,然后驅動H橋功率驅動電路來驅動直流電機。
在二相步進電機或直流有刷電機的多模式方式中,通過平臺設置步進電機或直流有刷電機的模式設置,并簡單通過控制模塊中的跳線端子來實現,如圖3所示。
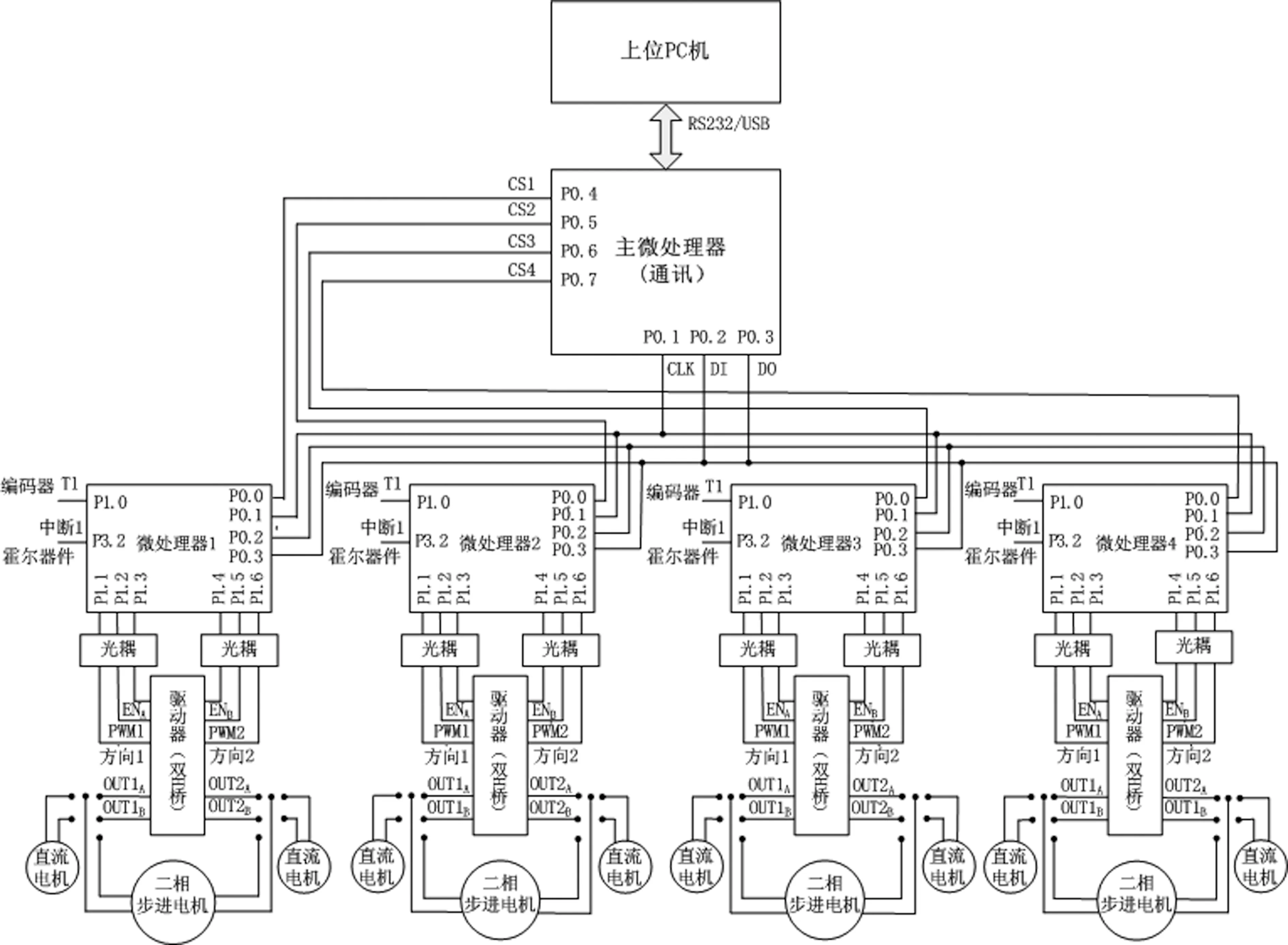
圖3 多軸多模式伺服控制系統平臺
4.4.2PWM控制技術
脈沖寬度調制以其控制簡單、靈活和動態響應好等優點,被廣泛應用于測量、通信、功率控制等諸多領域。
設計中針對直流有刷電機和二相步進電機的應用,采用單極性高頻的PWM(最高20kHz)。對于直流有刷電機采用定頻調寬法(恒頻占空比可調)[30-32],而步進電機采用調頻調寬法。其控制方法與控制電路都比較簡單,不再贅述。
4.4.3隔離技術
為減少驅動控制電路對外部控制電路的干擾,設計中在ATMEL AT89S52控制器MCU和電機驅動器L6205芯片之間用P314光電耦合器實現電氣隔離。
控制算法和控制策略集中在各子系統的控制器中,控制包括:直流有刷電機和步進電機的啟停、正反轉、提速和減速、高速與緊急制動及位置檢測與修正等。
4.5電機與傳感器電路設計
鑒于自動進樣器整體要求,在考慮扭矩、轉速、功率、繞組電感數值(直流電機)、相數、峰值電流(步進電機)及尺寸等因素的情況下,直流有刷電機采用ZGX45RGG162,步進電機為20BYG。
光電編碼器用來實現對電機轉速的編碼,它將測得的角位移轉換為脈沖形式的數字信號輸出。一般光電編碼盤分為絕對式光電編碼盤和增量式光電編碼器,設計中選擇了增量型500線光電編碼器,編碼器輸出脈沖信號經異或門電路2分頻后,經“與門”電路整形連接到子系統微處理器的P1.0(T2)計時器口。每個脈沖所對應的進樣器上的標度,理論上計算可達到0.01mm。霍爾開關器件通過上拉電阻連接到P3.3口,見圖3。設計中采用光電編碼器+霍爾開關器件組合構成的多級聯合定位技術[33,34],最大地消除了累積誤差,使系統的定位精度和抗干擾能力大為提高,有效地解決了初始原點重復精確定位和極限安全保護的雙重功能。
在系統平臺中,簡單調整控制驅動模塊中的跳線端子,并通過PC端操作界面設置即可實現二相步進電機或直流有刷電機模式的選擇。
系統模塊的總電源采用單24V直流供電,主電源為+5V供電,由7805芯片及電路完成轉換。
輔助電路由光電編碼器輸出脈沖整形接收電路、霍爾傳感器接收電路、H橋電荷泵升壓電路、RS232電平轉換電路及儀器同步信號觸發電路組成。
4.6機械設計
機械結構主要由基本外形組件(樣品盤、機塔、機座)、結構件、齒輪減速器和運動絲杠等組成。
在整個方案中始終遵循一個基本原則,就是力求兼容與互換,因此,設計中直流有刷電機、二相步進電機、編碼器和霍爾開關器件采用統一規格和型號,以利于兼容和互換,實現簡單制造和降低維護成本。
5 系統軟件與算法
軟件與算法也是本設計中十分重要的環節,是關鍵所在。自動進樣器的控制軟件由三個基本部分組成:上位機PC端的集中控制與管理、下位機(控制驅動模塊)流程的規劃與調度以及基本動作的控制。具體為實現兩種自動進樣器的工作流程控制、模式與方式、多軸與聯動控制、平穩移動與精確定位、高速運行與緊急制動等動作的控制,并配合硬件實現系統整體的高可靠、高效率、高性能的要求,限于篇幅限制,這里只作一些基本的描述。
5.1“共性”與“個性”設計
標準型110個樣品位與平臺型40個樣品位的自動進樣器“共性”與“個性”(不同物理結構的進樣器)的軟件設計,其“共性”部分采用復用方法,而“個性”部分則獨立實現。因此,在控制系統平臺PC端操作軟件中設計了步進電機和直流電機的工作模式,以及110個樣品位與平臺型40個樣品位的工作方式。
5.2控制與算法
本設計中在基本的PID算法基礎上,對算法進行了改進和變形,以滿足工作需求。如基于動態預測和模糊控制的方法實現精準的重復定位與進樣過程的高速制動。根據流程控制的不同,又有多種算法,例如,多模式控制、快速樣品尋位、多軸聯動等以運籌原理的優化控制算法,靜態和動態補償校正控制算法等。
具體控制算法和控制策略集中在各子系統的控制器中,包括:直流電機或步進電機的啟停、正反轉、提速和減速、高速與緊急制動及位置檢測與校正。
通過模型算法有效地解決了自動進樣器的面積和峰高的重復性、樣品梯度、最小進樣量以及系統穩定性與可靠性等關鍵技術問題。
6 實驗與結論
6.1應用實驗考核
通過與氣相色譜儀聯機的實際進樣,對標準型110個樣品位和平臺型40個樣品位自動進樣器進行了測試與評估。
經上海市環境保護產品質量監督檢驗總站、國家分析儀器質量監督檢驗中心和國家“十一五”科技支撐計劃課題測試專家組現場測試結果如下:

圖4 標準型110樣品位自動進樣器與GC-128色譜儀聯用
圖5 平臺型40樣品位自動進樣器與SP-2020色譜儀聯用
標準型110個樣品位自動進樣器與上海精科公司GC-128色譜儀聯用,如圖4所示,分別做了對10個扇區的每個扇區取一個樣品位重復3次和順序連續6次進樣的實驗測試;平臺型40個樣品位與北分瑞利SP-2020色譜儀聯用,如圖5所示,做了1到40個樣品位走對角線重復3次和順序連續6次進樣的實驗,實驗測試結果為:110個樣品位和平臺型40個樣品位的面積重復性RSD(相對標準偏差)分別為1.5%和1.1%,0.1μL、0.3μL、0.7μL和0.9μL的進樣梯度為0.99[35,36],滿足應用要求。在連續12小時的穩定性測試中,未出現死機、彎針等現象,在長達2周的連續運行評估測試中,均定位準確、運行安全可靠。
6.2結論
系統通過優化與再設計最終定型為4軸直流有刷電機X-Y-Z三個自由度的4軸運動系統,并成功地研發出了嵌入式一體化4軸直流有刷電機控制驅動模塊(運動控制電路、驅動電路、光電隔離電路、檢測接收電路與輔助電路),模塊尺寸為:71mm×65mm×30mm。采用單一24V直流供電,功耗小于10W,配置RS-232通訊接口。兩種自動進樣器的硬件成本(嵌入式一體化控制驅動模塊、直流有刷電機、編碼器和霍爾開關器件)約2000元左右(機械部分除外),有很高的性價比。
設計獲得了成功,實現了一體控制驅動模塊、4個電機、編碼器和霍爾開關器件在兩種機型上的兼容與互換,使得研發設計與維護大為簡化。兩種自動進樣器功能與性能的測試滿足了課題指標的要求,并通過國家驗收[36]。項目的研究成果為分析儀器的研發與制造提供了一種新的思路與途徑。
[1]PAS CONCEPT Multifunctional Autosampler.http://www.instrument.com.cn
[2]CTC Analytics AG PAL RTC/ /RSI / LSI.http://www.palsystem.com
[3]Gerstel MPSROBOTIC RoboticPRO AUTOSAMPLER.http://www.gerstelus.com
[4]HTA- Scientific Instruments HT300A Autosampler.http://www.hta-it.com
[5]張西咸,陳蓮,李海洋,等.一種低成本的氣相色譜液體自動進樣器的設計[J].現代科學儀器,2007,(3):49-53.
[6]鄭州克萊克特公司.AS-2902自動進樣器.http://www.collect-as.com
[7]浙江泛泰儀器.AS-2100標準型自動進樣器.http://www.finetec.info
[8]上海思達儀器公司.AS-200型液體自動進樣器.http://www.shanghai-sida.com.
[9]上海荊和分析儀器有限公司.AS-8105.全自動進樣器.http:// www.jinghe17.com
[10]Martin M V,Ishii K.Design for variety:developing standardized and modularized product platform architectures[J].Research in Engineering Design,2002,13(4):213-235.
[11]Simpson T W.Product platform design and customization:Status and promise[J].Artificial Intelligence for Engineering Design Analysis &Manufacturing,2004,18(1):3-20.
[12]侯亮,王浩倫,穆瑞,等.模塊化產品族演進創新方法研究[J].機械工程學報,2012,48(11):55-64.
[13]Alsawalqah H I,Kang S,Lee D.A method for software product platform design based on features.SPLC Workshops 2013:18-25
[14] 楊云斌,王峰軍,韋力凡,等.數字樣機技術在復雜產品工程設計中的應用研究[J].機械設計與制造,2012,(4):253-255.
[15]孫育才.ATMEL新型AT89S52系列單片機及其應用[M].北京:清華大學出版社,2005:5-18,223-230.
[16]彭礴,張明敏,林飛龍.基于AT89S52高精度步進電機伺服控制系統設計[J].電子測量技術,2011,34(3):49-53.
[17]徐熙平,崔京殊,王曦澤.基于AT89S52的42M-1.8D步進電機自動控制系統設計[J].長春理工大學學報,2010,33(2):54-56.
[18]姜書政,王桂海.基于AT89S52單片機的電機控制系統設計[J].現代電子技術,2010,33(7):138-140 .
[19]曾孟雄,葉順流,方春嬌.基于AT89S52的步進電機兩軸聯動速度控制[C].中國人工智能學會智能檢測與運動控制會議,2008.
[20]陳沖,范鵬.數字式直流調速系統的設計與研究[J].微電機,2012,45(4):52-55.
[21]姜偉偉,高云國,韓光.基于IRF530和AT89S52的步進電機驅動控制器[J].電機與控制應用,2010,37(12):43-46.
[22]王志超,林巖,李大慶.兩相混合式步進電機細分驅動[J].信息與電子工程,2008,12(6):457-459.
[23]楊美剛,李小文.SPI接口及其在數據交換中的應用[J].通信技術,2007,40(11):385-387.
[24]羅盛裕,李斌.SPI接口的出錯分析及其改進[J].單片機與嵌入式系統應用,2006,(4):72-74.
[25]楊鎮首,李軍.基于SPI接口的多機擴展和通信方法[J].自動化與信息工程,2011,32(2):39-42.
[26]L6205 DMOS DUAL FULL BRIDGE DRIVER.http://www.st.com
[27]AN1762,Application note,L6205 DUAL FULL BRIDGE DRIVERS.http://www.st.com
[28]AN1794,Application note.http://www.st.com
[29]Motor control Reference Guide.http://www.st.com
[30]魏桑,王宇野.一種新型PW M直流電機驅動器的研究[J].電子技術,2013,26(11);114-116.
[31]肖然,郝守剛,周明,李建秋.直流電機位置伺服系統驅動器設計[J].電子技術應用,2007,33(9);25-27.
[32]孫立志.PWM與數字化電動機控制技術應用[M].北京:中國電力出版社,2008:45~72.
[33]郭清,王元昔.霍爾傳感器在直流電機轉速測量中的應用研究[J].傳感器與微系統,2011,30(07):54-56.
[34]趙炯,張濤,朱海濤等.高精度一維標定裝置控制系統設計[J].中國工程機械學報,2014,12(1):38-43.
[35]國家分析儀器質量監督檢驗中心,檢驗報告,氣相色譜液體自動進樣器,第1010-Y-003-01.
[36]國家“十一五”科技支撐計劃課題,2006BAK03A04,色譜儀器關鍵部件的研制與開發—氣相,現場測試報告.
Development of a multi-axis multi-mode autosampler servo control system.
Chen Lian1,Chen Shibin2
(1.Department of Science and Technology Teaching,China University of Political Science and Law,Beijing 100088,China;2.Beijing ShineCosmos Technology Co.,LTD.,Beijing 100176,China)
The low-cost multi-axis brushed DC-motor servo control system is compatible with the standard and platform autosampler.The experimental result is good.The RSDs of the peak area reproducibility of both types of autosampler are ≤1.5% and the linear correlation coefficient of the peak area is better than 0.99.
servo control;motor;platform;gas chromatography;autosampler
國家“十一五”科技支撐計劃項目:科學儀器設備與開發(2006BAK03A04)
陳蓮,女,1962年出生,碩士,副教授,主要研究領域為計算機技術、分析儀器,E-mail::cupl_cl@126.com。
10.3936/j.issn.1001-232x.2016.04.001
2016-04-12
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
