深海潛標布放運動與定深控制策略研究
2016-10-09 03:17:04葛德宏高大遠王光輝海軍潛艇學院山東青島26699中國人民解放軍92267部隊山東青島26602
艦船科學技術 2016年7期
關鍵詞:深度
葛德宏,朱 海,高大遠,王光輝(.海軍潛艇學院,山東 青島 26699;2.中國人民解放軍92267部隊,山東 青島 26602)
深海潛標布放運動與定深控制策略研究
葛德宏1,2,朱海1,高大遠1,王光輝1
(1.海軍潛艇學院,山東 青島 266199;2.中國人民解放軍92267部隊,山東 青島 266102)
深海潛標是一種海洋環境監測平臺,具有多元化的海洋科學研究能力。本文針對一種可實現自動分離、錨泊的一體化潛標,開展布放運動與定深控制研究。建立潛標水中整體和分離運動的模型,其中考慮了剎車的過渡過程;提出 bang-bang 控制定深策略。仿真結果表明,潛標分離后可以自動布放至海底錨泊,同時將上段平臺定深至某一深度。
深海潛標;布放;運動仿真;定深控制
0 引 言
深海潛標是一種海洋環境監測平臺,可根據需求搭載不同的監測設備和儀器來測量海流、水溫、電導率、聲速、密度等參數,具有多元化的海洋科學、環境研究的價值和能力[1-3]。目前,國內外的深海潛標多采用單點繃緊式系留系統,即將探測設備串接在系留索上,并在每個探測設備上方配置玻璃球組以確保探測姿態。由于玻璃球多且分散,導致潛標布放方法復雜,時間長[4-5]。研究可實現自動分離、錨泊的一體化潛標是未來重要的發展方向。該類潛標采用頂端浮力實現系留姿態穩定,布放方法簡單,可自動定深。本文對一體化潛標在水中垂直平面的運動進行分析,研究基于 bang-bang 控制的自動定深策略,為樣機研制提供理論指導和技術支撐。
1 潛標布放概述
1)初始狀態。浮筒與剎車裝置和儲索筒為一個整體(浮筒段),錨為一個整體(錨段),兩段由連接分離機構連接。浮筒段具有正浮力,錨段具有負浮力,剎車裝置鎖緊,纜索不能從儲索筒中抽出。
2)目的。因為浮筒段耐壓不超過 330m,同時為保證布放的安全性,要求浮筒段布放后震蕩深度不能淺于 80m。則通過調整纜索拉力,在錨著底之前保證浮筒段在該深度范圍內運動,錨著底后,最終將浮筒段定深在 200m 深度進行海洋測量,見圖2。
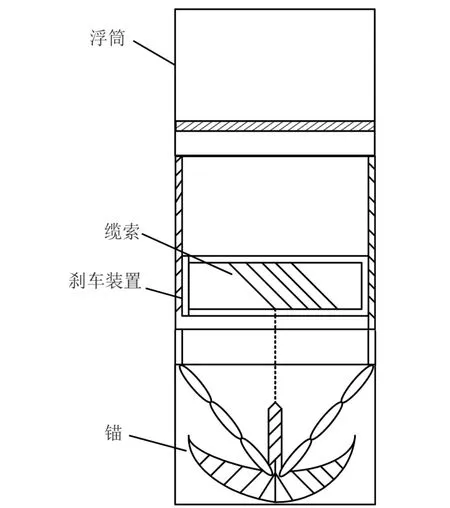
圖1 一體化深海潛標示意圖Fig.1 The diagrammatic sketch of submerged buoy
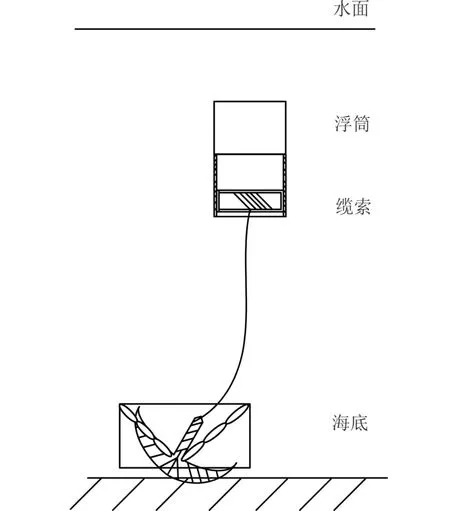
圖2 布放定深最終狀態圖Fig.2 Final state diagram of laying and depth control
3)運動過程。深海潛標布放入水中,整體下沉到一定深度后,剎車裝置松開,分離機構動作將浮筒段和錨段分開,則在錨的負浮力和浮筒的正浮力的作用下,纜索被從儲索筒中抽出,錨下沉,浮筒上浮。在浮筒段達到需要控制的深度時,剎車裝置剎車,停止放索,使錨和浮筒繼續以一個整體下沉,下沉一段時間到達浮筒深度限制下限后,可以逐步松開剎車繼續放纜索,浮筒上浮,錨段繼續下沉。整個過程往復,達到將消耗時間使錨著底的目的。
2 布放運動建模
2.1基本假設
1)布放過程中,纜索無伸長,且纜索不斷線。實際過程中應該在分離、剎車、錨著底等時機使用制動器滑差放索緩沖,以防止纜索斷開;
2)海流為水平流向,不影響布放定深過程;
3)潛標由水面船布放于水中,分析運動從布放時潛標豎直且速度為 0 開始,該假設對潛標運動及控制定深不產生實質影響。
2.2兩段自由運動受力分析
1.《秀才胡同》的種種典故不是簡單的疊加,是雖未看破紅塵卻無可奈何終于拋卻所有的悲涼入骨;而《東風破》卻是將本就破碎的東西進行縫補,以修辭為針線,典故為布料進行創作,讓歌曲充斥看破一切但心卻仍會為往事所動的蒼茫惆悵之感。《秀才胡同》中如“沽酒當壚”、“人比黃花瘦”等典故無疑完整使用了典故本身完整的氛圍,多個典故的氛圍累加,形成復雜而統一的感覺;而《東風破》用典則是通過關鍵詞如“古道”、“孤燈”等典故的片段來交織成完整的情緒。
對浮筒段在水中自由運動時的受力情況進行分析,如圖3所示,F1為纜索拉力,R1為流體阻力,W1為浮力,G1為重力。無論是浮筒段還是錨段的受力狀態基本相同,區別僅在部分力的方向上,下部錨段不單獨分析。
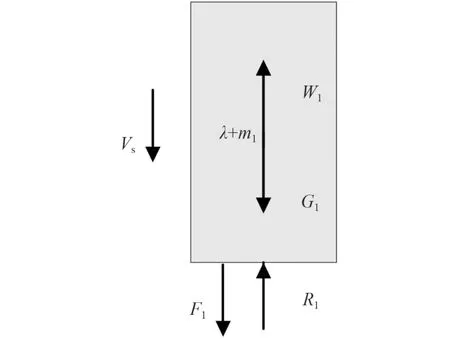
圖3 浮筒段自由運動時受力分析Fig.3 Stress analysis of free movement of submerged buoy
海水阻力為:

式中:CD為浮筒或錨段阻力系數[6],取 CD=1.2;ρ為流體密度;Vs為豎直方向上浮筒相對流體的速度;A1為迎流面積。
潛標布放時,浮筒在海水中豎直運動,由于海水粘性力的作用,產生一部分的附加質量,該附加質量的估算公式為[6]:
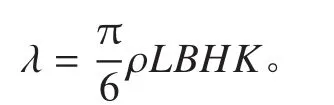
式中:L,B,H 分別為平臺的長、寬、高,K為附加質量系數,查表[2]為 0.02。
假設浮筒段向下運動速度向下為正,可得下式

將式(1)代入式(2),整理可得:

其中,質量m1隨著放纜而發生變化,如下式:

式中:m為浮筒段與纜總質量;Lf為放纜長度;Ll為纜索總長;ml為纜索總質量。
2.3兩段整體運動受力
當剎車裝置剎車后,浮筒段和錨段成為一個整體運動,平衡態時,具體受力分析如圖4所示。
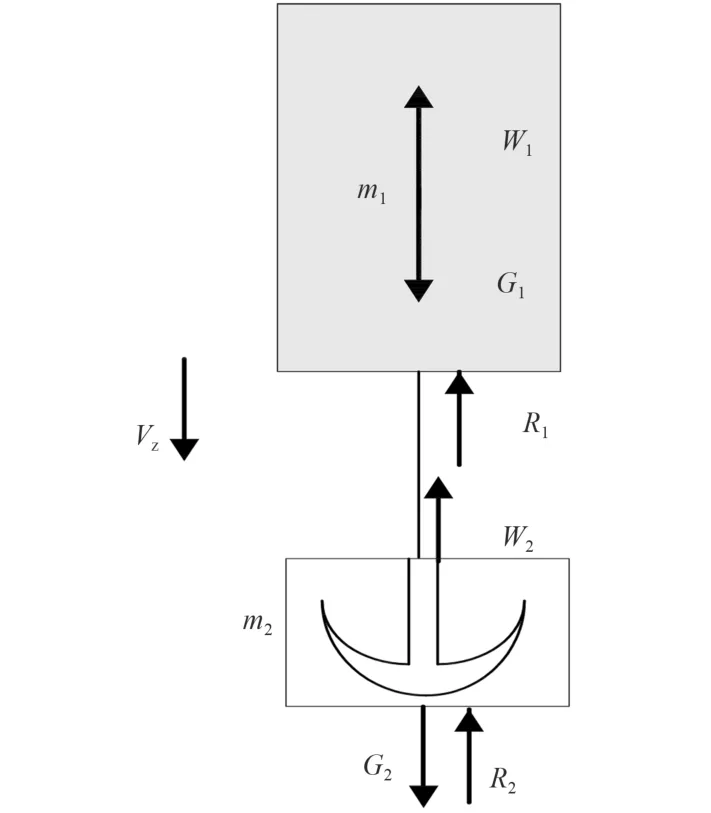
圖4 潛標整體運動受力分析Fig.4 The force analysis of the overall movement of submerged buoy
可得:

得出整體運動時的下降速度 Vz,由該速度可得出阻尼力大小。
2.4剎車瞬間運動分析
假設浮筒段和錨段均自由運動至恒定速度后進行剎車,即剎車前處于受力平衡狀態,剎車時過渡時間較短,則剎車瞬間上段和下段可以看做是一個碰撞過程,滿足動量守恒定律:

此后整體受力為:

式中:mf和 Gf為已放纜索的水中質量與重量,該過程持續到 V3與第2階段整體平衡段速度 Vz相等,因纜索直徑很小,忽略其附加質量。
3 定深控制
考慮到剎車裝置的最小工作時間,為避免剎車裝置處于剎車與松開頻繁交替工作狀態,將定深過程分為2段,即前期粗控段、著底前控制段。前期粗控段主要目的是通過在定深線附近震蕩消耗時間,以達到放纜索及錨段下沉的目的,使用深度量測進行定深 bangbang 控制[7-9]。
浮筒段裝有深度計,錨段裝有高度計,通過量測浮筒段深度進行定深控制,通過高度計測量錨段距離海底的距離確定開始著底段控制的時機。
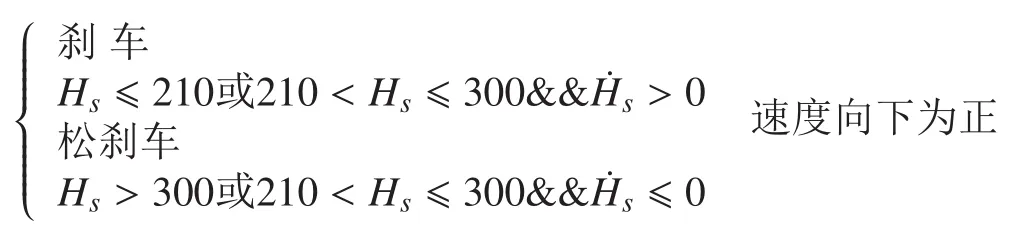
根據需要,潛標布放區域 4 000m 水深,要求錨著底;浮筒段定深在水下 200m 深度。從制造成本考慮,浮筒段最大耐壓深度約為 330m;而從安全性考慮,浮筒的深度不得小于 80m。因此在錨段下沉過程中,浮筒的深度應該在 80~330m之間,最終定深 200m。考慮需保留一定的余量,確定 bang-bang 控制策略為:
粗控段:

因為浮筒段震蕩幅值為 200m,因此確定進行錨著底段控制的時機為錨段高度計測量距離海底小于或等于 200m 時,即當錨下降到 3 800m 深度時開始。
此時應保證錨著底后,浮筒段處于 200m 水深以下,因此調整剎車深度控制值
錨著底后,因浮筒段仍處于 200m以下,松開剎車,至 200m 深度剎停。此后,如浮筒段在流的作用下產生沉降,則以錨著底控制方式將其定深在 200m。
4 仿真分析
仿真條件:纜索 4 000m,纜索水中重 48kg,上、下段平臺為直徑 400mm的圓柱,上段長 3.5m,質量 350kg,浮力 50kg;下段長 1.5m,質量 600kg,浮力 80kg。
圖5~圖7分別為潛標布放運動及定深控制仿真圖,顯示了布放、定深震蕩粗控和錨著底控制時浮筒段和錨段的速度、深度和加速度變化歷程。第1階段是布放開始,初始下沉速度為 0,浮筒和錨整體下沉到 300m,其速度經歷了短暫的加速過程后達到平衡;第2階段為松開纜索自由運動時期,浮筒和錨具有相同的初速度與深度,此后自由運動到各自的平衡狀態,即浮筒段在正浮力的作用下達到向上的勻速運動,錨段在負浮力的作用下向下勻速運動;至浮筒段上升到水下 100m為止;第3階段經歷自由平衡狀態、剎車至整體運動的平衡狀態,下沉到 300m。在錨著底控制前保持 2、3階段重復運動。第4階段為錨著底控制段,轉換控制方式。可見潛標分離后可以自動布放至海底錨泊,同時將浮筒段定深至 200m。
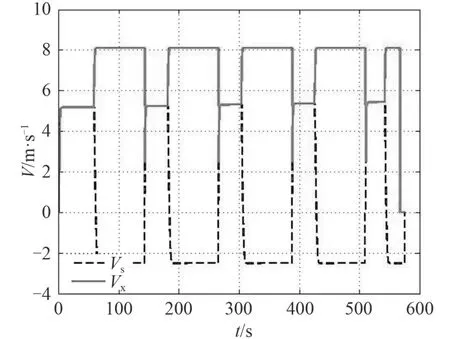
圖5 布放及定深控制過程平臺運動速度變化Fig.5 Speed dynamic change of submerged buoy on depth control process
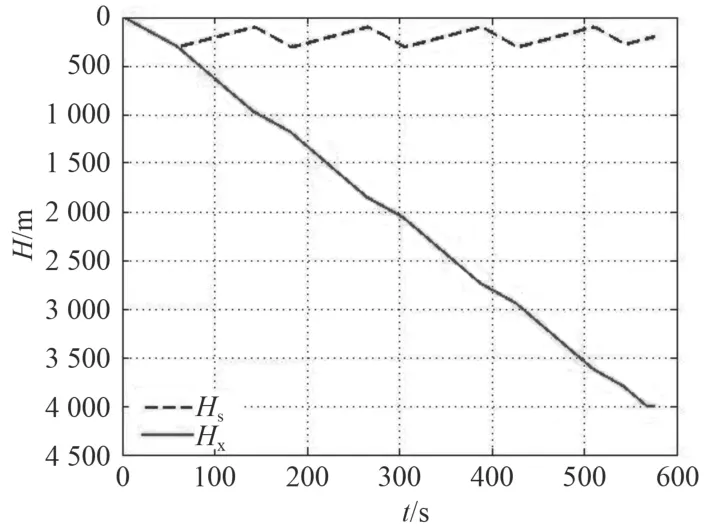
圖6 布放及定深控制過程平臺深度變化Fig.6 Depth dynamic change of submerged buoy on depth control process
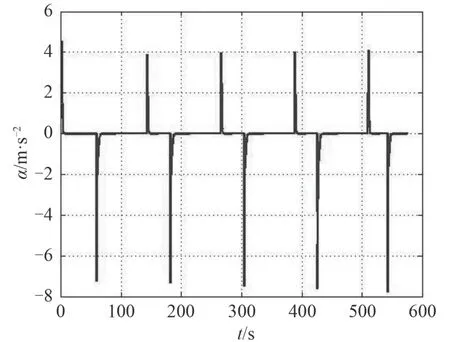
圖7 布放過程上段平臺運動加速度變化Fig.7 Acceleration dynamic change of upper platform on laying process
5 結 語
本文對深海潛標布放運動和定深控制技術進行仿真研究。首先,建立了布放過程中浮筒段和錨段水中整體和分離運動的模型,其中考慮了剎車的過渡過程;其次,提出了bang-bang 控制定深方法,并完成仿真。結果表明,系統分離后可以自動布放至海底錨泊,同時將浮筒段定深至某一深度。下一步將開展布放定深試驗,為樣機研制提供技術支撐。
[1]方書甲.海洋環境監測是海洋發展和維權的支撐[J].艦船科學技術,2012,34(2):3-10.FANG Shu-jia.Marine environment monitoring:essential to marine development and rights guarding[J].Ship science and Technology,2012,34(2):3-10.
[2]梁炎.海底網絡中心戰傳感器網絡[J].艦船科學技術,2006,28(1):109-112.LIANG Yan.Undersea sensor network for network-centric warfare[J].Ship Science and Technology,2006,28(1):109-112.
[3]EROL-KANTARCI M,MOUFTAH H T,OKTUG S.A survey of architectures and localization techniques for underwater acoustic sensor networks[J].IEEE Communications Surveys & Tutorials,2011,13(3):487-502.
[4]EROL-KANTARCI M,MOUFTAH H T,OKTUG S.Localization techniques for underwater acoustic sensor networks[J].IEEE Communications Magazine,2010,48(12):152-158.
[5]谷軍.多浮標集裝式深海信息傳輸平臺系統技術[J].艦船科學技術,2009,31(1):112-116.GU Jun.Multi-buoy containerization type deep sea intelligence transmission platform system technology[J].Ship Science and Technology,2009,31(1):112-116.
[6]施生達.潛艇操縱性[M].北京:國防工業出版社,1995.
[7]HUANG S.Stability analysis of the heave motion of marine cable-body systems[J].Ocean Engineering,1999,26(2):531-546.
[8]GOBAT J I,GROSENBAUGH M A.Time-domain numerical simulation of ocean cable structures[J].Ocean Engineering,2006,33(10):1373-1400.
[9]吳永海.全方位移動機器人運動控制及其規劃[D].杭州:浙江大學,2011.
Research on laying motion simulation and depth control of deep-sea submerged buoy
GE De-hong1,2,ZHU Hai1,GAO Da-yuan1,WANG Guang-hui1
(1.Navy Submarine Academy,Qingdao 266199,China;2.No.92267 Unit of PLA,Qingdao 266102,China)
The submerged buoy is a kind of platform for ocean/marine environment survey; it can be used for sea scientific research.The laying method of common submerged buoy is complicated and time-consuming.Aiming at a incorporate submerged buoy which can separate and moor automatically,this paper study the laying motion and depth control of platform.Firstly,the model of motion is established considering the transition process.Secondly,the bang-bang control method of depth control is presented and simulation has been completed.The result of simulation shows that the submerged buoy can separate and moor automatically and control the upper platform to appointed deep.
submerged buoy;laying;motion simulation;depth control
U661.33;TP273
A
1672-7619(2016)07-0087-04
10.3404/j.issn.1672-7619.2016.07.019
2015-12-14;
2016-03-04
中國博士后科學基金資助項目(2014M552660)
葛德宏(1977-),男,博士后,工程師,從事船舶與海洋結構物運動控制與導航相關研究。
猜你喜歡
中學生數理化·七年級數學人教版(2022年6期)2022-06-05 06:50:50
快樂學習報·教育周刊(2022年16期)2022-05-01 21:25:05
中學生數理化·七年級數學人教版(2020年11期)2020-12-14 06:59:52
藝術品鑒證.中國藝術金融(2018年8期)2019-01-14 01:14:28
藝術品鑒證.中國藝術金融(2018年10期)2019-01-08 02:44:26
藝術品鑒證.中國藝術金融(2018年6期)2019-01-08 02:43:04
藝術品鑒證.中國藝術金融(2018年12期)2018-08-26 06:03:48
新聞傳播(2016年10期)2016-09-26 12:14:59
新聞傳播(2015年10期)2015-07-18 11:05:40
交通建設與管理(2015年15期)2015-03-20 15:18:57
