多缸調(diào)平系統(tǒng)模糊相鄰耦合同步控制研究
2016-10-10 05:05:11劉芮葭
中國(guó)機(jī)械工程 2016年17期
劉芮葭 陳 凱
遼寧工程技術(shù)大學(xué),阜新,123000
?
多缸調(diào)平系統(tǒng)模糊相鄰耦合同步控制研究
劉芮葭陳凱
遼寧工程技術(shù)大學(xué),阜新,123000
針對(duì)調(diào)平系統(tǒng)的多液壓缸同步控制研究,提出了一種基于模糊相鄰耦合的控制方法。首先對(duì)調(diào)平系統(tǒng)受力及多缸控制系統(tǒng)進(jìn)行分析,建立控制對(duì)象的非線性數(shù)學(xué)模型。對(duì)相鄰耦合控制器進(jìn)行設(shè)計(jì),使用補(bǔ)償器將相鄰兩根液壓缸位置同步誤差融合到液壓缸控制器中,對(duì)于難以通過(guò)常規(guī)方法精確獲得的補(bǔ)償系數(shù),使用模糊PID控制算法獲取。通過(guò)MATLAB仿真和實(shí)驗(yàn)對(duì)模糊相鄰耦合的同步控制方法進(jìn)行測(cè)試,并使用主從同步控制方法進(jìn)行對(duì)比分析。結(jié)果表明,使用模糊相鄰耦合同步控制時(shí),四根液壓缸誤差波動(dòng)較小,并且在液壓缸加減速階段能快速將誤差降低,具有較好的同步控制性能。
同步控制;相鄰耦合;模糊控制;調(diào)平系統(tǒng)
0 引言
多缸調(diào)平系統(tǒng)廣泛應(yīng)用于軍事、水利、海洋工程以及實(shí)驗(yàn)設(shè)施中的重物提升和調(diào)平工作中。在某些應(yīng)用場(chǎng)合,對(duì)于調(diào)平系統(tǒng)運(yùn)動(dòng)的穩(wěn)定性和精度都有著嚴(yán)格的要求,因此就要對(duì)多液壓缸進(jìn)行有效的同步控制[1-2]。
文獻(xiàn)[3-5]使用主從同步控制方法實(shí)現(xiàn)多缸同步控制,主從同步控制方法是將上一個(gè)液壓缸的輸出作為下一個(gè)液壓缸的輸入,在系統(tǒng)穩(wěn)態(tài)時(shí),能夠保證多個(gè)液壓缸的同步性,但是當(dāng)負(fù)載發(fā)生突變或加減速時(shí),多個(gè)液壓缸的同步性較差。
文獻(xiàn)[6-8]使用等狀態(tài)交叉耦合控制實(shí)現(xiàn)多缸同步控制,等狀態(tài)交叉耦合控制是將各個(gè)液壓缸的跟蹤誤差的均值作為每個(gè)液壓缸的輸入,以此克服主從同步控制方法產(chǎn)生的滯后問(wèn)題。
筆者針對(duì)調(diào)平系統(tǒng)的多液壓缸同步控制研究,提出一種基于模糊相鄰耦合的控制方法。
1 多缸調(diào)平系統(tǒng)數(shù)學(xué)模型
多缸調(diào)平系統(tǒng)基本組成如圖1所示,由四個(gè)單作用液壓缸、電液伺服閥、泵站以及平臺(tái)組成。
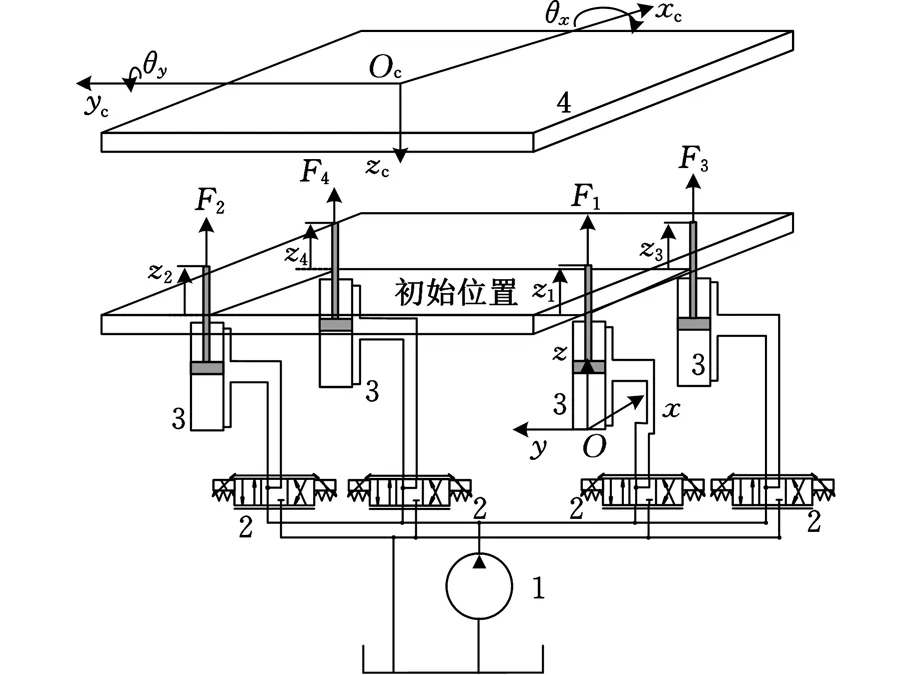
1.液壓泵 2.電液伺服閥 3.液壓缸 4.平臺(tái)圖1 多缸調(diào)平液壓系統(tǒng)原理圖
設(shè)平臺(tái)中心即為系統(tǒng)相對(duì)坐標(biāo)系Ocxcyczc,四個(gè)升降液壓缸的運(yùn)動(dòng)誤差將導(dǎo)致平臺(tái)繞著坐標(biāo)系的x軸或y軸旋轉(zhuǎn)θx或θy角度,根據(jù)受力分析可知:
(1)
式中,m為平臺(tái)總體質(zhì)量,kg; Fi為四個(gè)液壓缸輸出力,N;i表示第i個(gè)液壓缸,i=1,2,3,4;zc為平臺(tái)升降位移,m; Pix為四個(gè)液壓缸鉸接點(diǎn)x軸上位移,m;Piy為四個(gè)液壓缸鉸接點(diǎn)y軸上位移,m;Jx為平臺(tái)繞x軸轉(zhuǎn)動(dòng)慣量,kg·m2; Jy為平臺(tái)繞y軸轉(zhuǎn)動(dòng)慣量,kg·m2;θx為平臺(tái)繞x軸轉(zhuǎn)角,rad;θy為平臺(tái)繞y軸轉(zhuǎn)角,rad[9]。
對(duì)液壓缸受力進(jìn)行分析,可知:
(2)
式中,zi表示第i個(gè)液壓缸的位移;Ai1為第i個(gè)液壓缸無(wú)桿腔的面積,m2;piL為第i個(gè)液壓缸的負(fù)載壓力,Pa;mi為第i個(gè)液壓缸的活塞桿質(zhì)量,kg;Bip為第i個(gè)液壓缸的黏性阻尼系數(shù),N·s/m;Fi為第i個(gè)液壓缸受到的外界載荷,N。
同步控制液壓缸的數(shù)學(xué)模型為[10]
(3)
ψi(zi,piL)=qViL(zi,piL)/(Cidωi1xivVie(zi))
π(zi)=-CitK/Vie(zi)
Kiq=Cidωi1K

2 模糊相鄰耦合同步控制
2.1相鄰耦合控制器設(shè)計(jì)
模糊相鄰耦合控制僅考慮相鄰兩根液壓缸的位移,即第i個(gè)液壓缸位移控制器的輸入包含了第i個(gè)液壓缸位移實(shí)際跟隨誤差和第i-1個(gè)、第i+1個(gè)液壓缸位移與第i個(gè)液壓缸位移的相對(duì)誤差。因此對(duì)四缸同步控制,或者更復(fù)雜的六缸、八缸同步控制,其控制器結(jié)構(gòu)復(fù)雜程度不會(huì)增加。相鄰耦合控制結(jié)構(gòu)如圖2所示[11]。
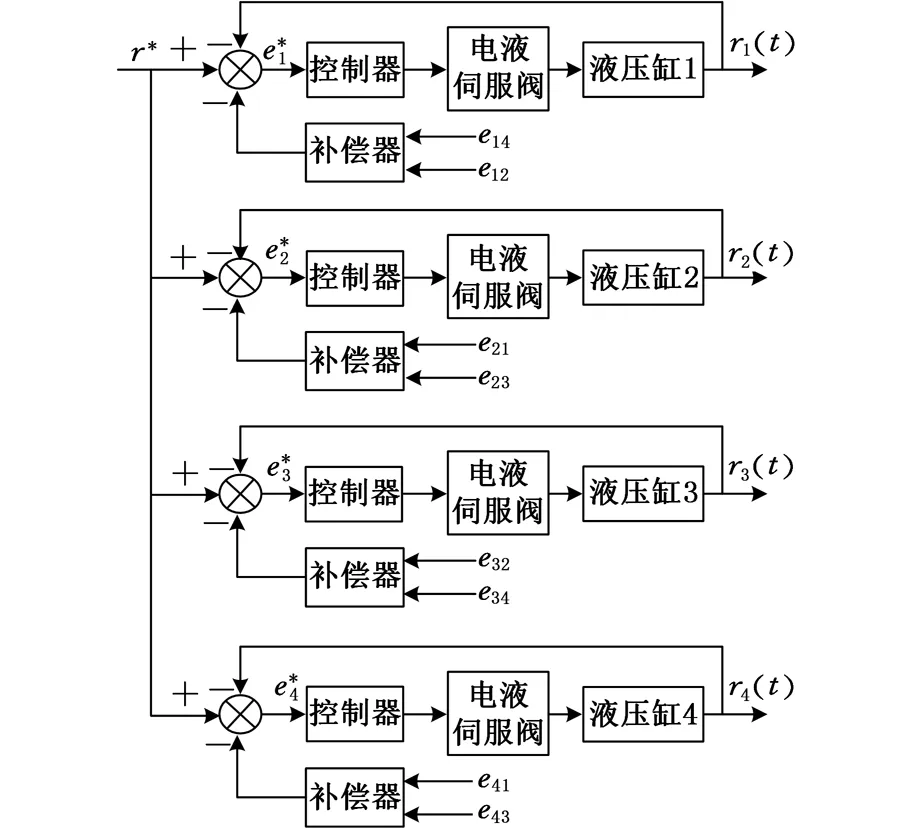
圖2 相鄰耦合控制結(jié)構(gòu)圖
補(bǔ)償器原理如圖3所示。補(bǔ)償控制器的輸入為第i個(gè)液壓缸與其相鄰兩個(gè)液壓缸位置的同步誤差,將這兩個(gè)同步誤差分別與對(duì)應(yīng)的補(bǔ)償系數(shù)相乘后相加即得到補(bǔ)償器的輸出。對(duì)于多液壓缸同步控制這樣的復(fù)雜非線性系統(tǒng),補(bǔ)償系數(shù)難以通過(guò)常規(guī)方法精確獲得,因此使用模糊PI控制算法獲取補(bǔ)償系數(shù)[12]。
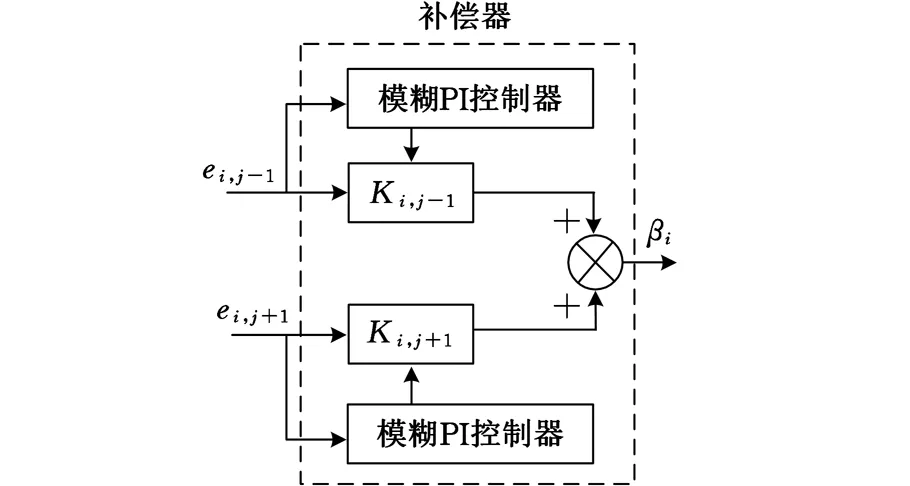
圖3 補(bǔ)償器原理
綜上,第i個(gè)液壓缸的耦合誤差,即第i個(gè)液壓缸運(yùn)動(dòng)控制器的輸入表示為
(4)
式中,r*為設(shè)定信號(hào);ei為第i個(gè)液壓缸位移實(shí)際跟隨誤差;ei,i-1為第i個(gè)液壓缸與第i-1個(gè)液壓缸的同步誤差;ei,i+1為第i個(gè)液壓缸與第i+1個(gè)液壓缸的同步誤差;Ki,i-1為第i個(gè)液壓缸與第i-1個(gè)液壓缸的同步誤差補(bǔ)償系數(shù); Ki,i+1為第i個(gè)液壓缸與第i+1個(gè)液壓缸的同步誤差補(bǔ)償系數(shù)。
對(duì)多缸調(diào)平系統(tǒng)進(jìn)行同步控制的目的在于通過(guò)控制器控制液壓缸使得ei、ei,i-1和ei,i+1盡量趨于零[13-14]。
2.2同步誤差補(bǔ)償系數(shù)模糊控制器設(shè)計(jì)
同步誤差補(bǔ)償系數(shù)模糊控制器的輸入為液壓缸之間的同步誤差及誤差變化率,模糊推理規(guī)則推理出PID控制器的輸入量。
設(shè)計(jì)PID控制器時(shí),暫不考慮微分環(huán)節(jié)。將模糊PID控制器輸出的比例和積分增量進(jìn)行歸一化處理:
(5)
式中,KP為PID控制器比例項(xiàng)系數(shù);KI為PID控制器積分項(xiàng)系數(shù)。
根據(jù)多缸調(diào)平系統(tǒng)實(shí)際工況,將液壓缸同步誤差和同步誤差變化率范圍確定為-20~20 mm和-200~200 mm/s。分別通過(guò)0.25和0.025的量化因子將其量化到-5~5的論域范圍內(nèi)。使用NB、NS、ZO、PS、PB、S、M、B分別表示模糊語(yǔ)言負(fù)大、負(fù)小、零、正小、正大、小、中、大。將同步誤差和誤差變化率的模糊子集設(shè)定為{NB,NS,ZO,PS,PB},將ΔKP和ΔKI的模糊子集設(shè)定為{S,M,B}。制定的模糊推理規(guī)則如表1和表2所示。
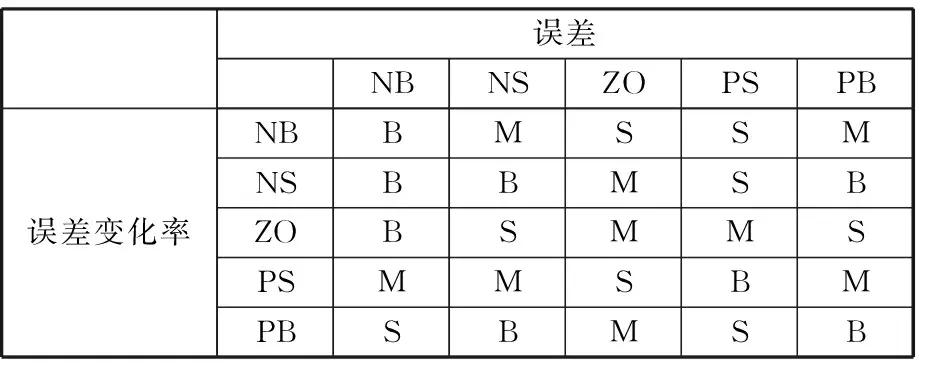
表1 ΔKP的模糊推理規(guī)則
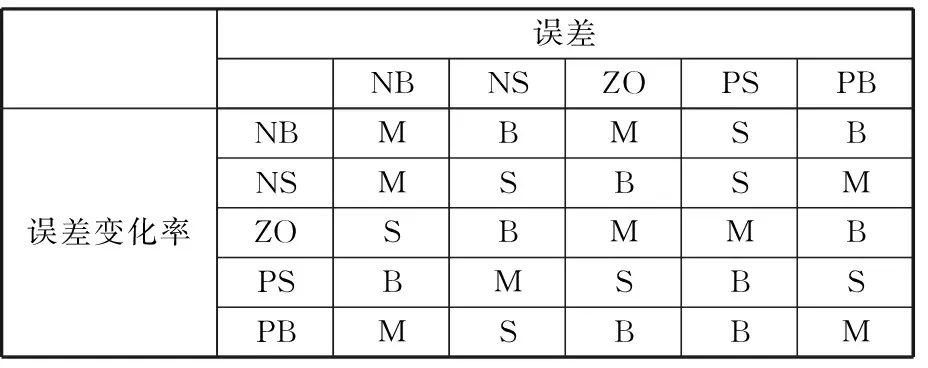
表2 ΔKI的模糊推理規(guī)則
3 同步控制方法仿真研究
使用MATLAB/Simulink工具箱建立多缸調(diào)平系統(tǒng)同步控制的仿真模型,如圖4所示,并設(shè)置參數(shù)如表3所示。
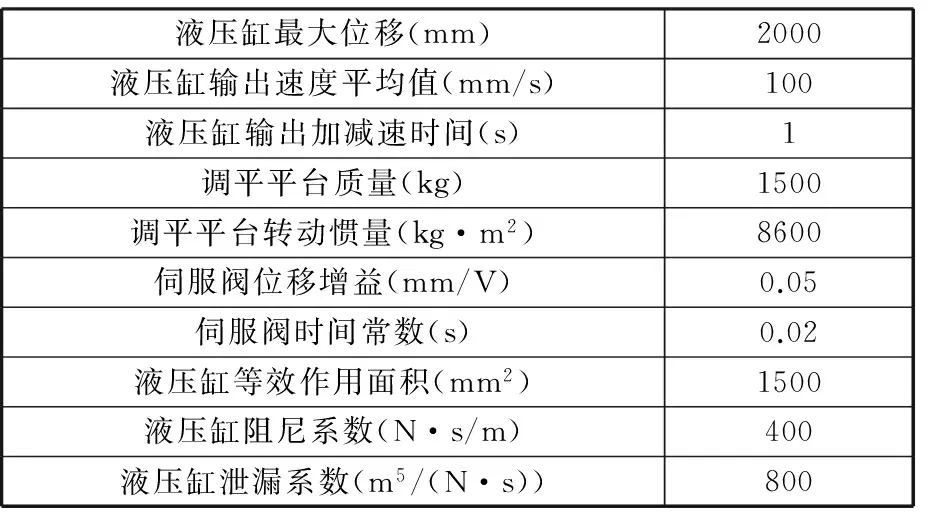
表3 調(diào)平系統(tǒng)參數(shù)
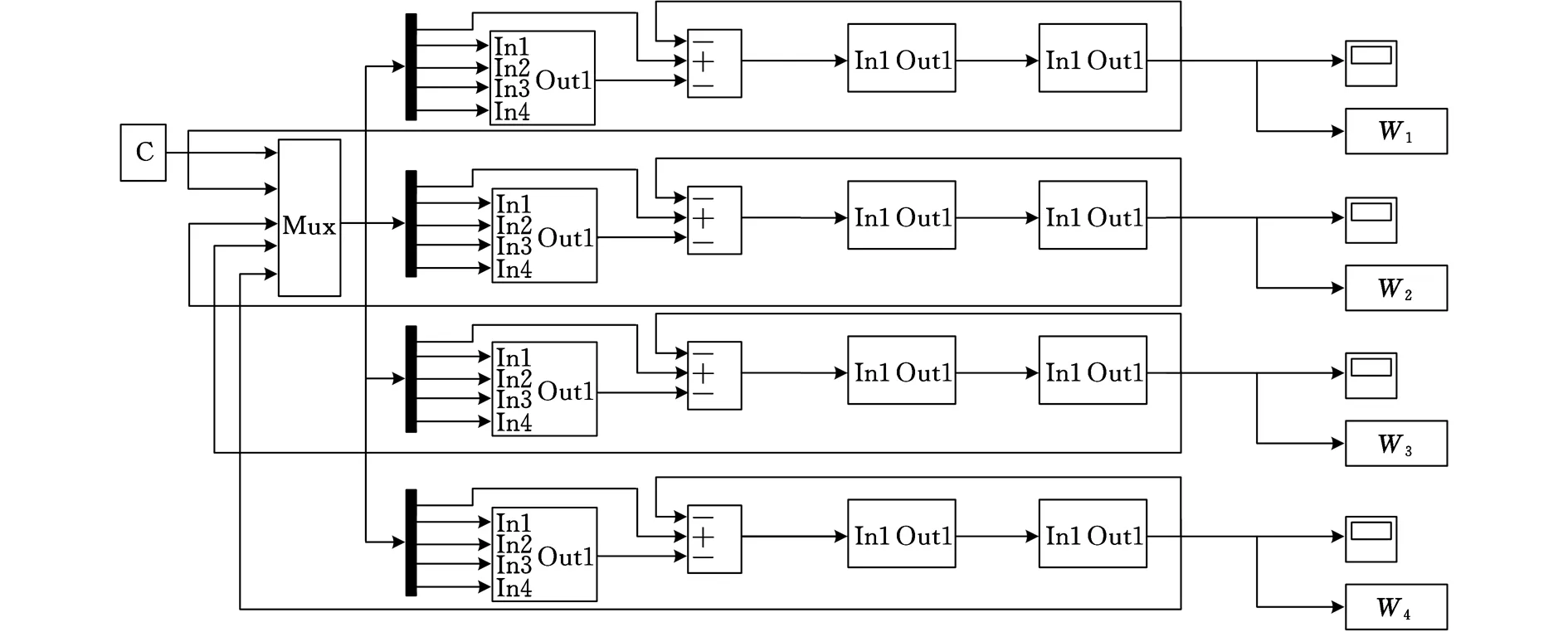
圖4 MATLAB仿真模型
使用主從同步控制方法與相鄰耦合同步控制進(jìn)行對(duì)比研究。設(shè)定仿真時(shí)間為30 s,仿真步長(zhǎng)為100 ms。系統(tǒng)仿真時(shí)的輸入信號(hào)曲線如圖5所示。仿真得到兩種同步控制方法的仿真曲線如圖6所示。
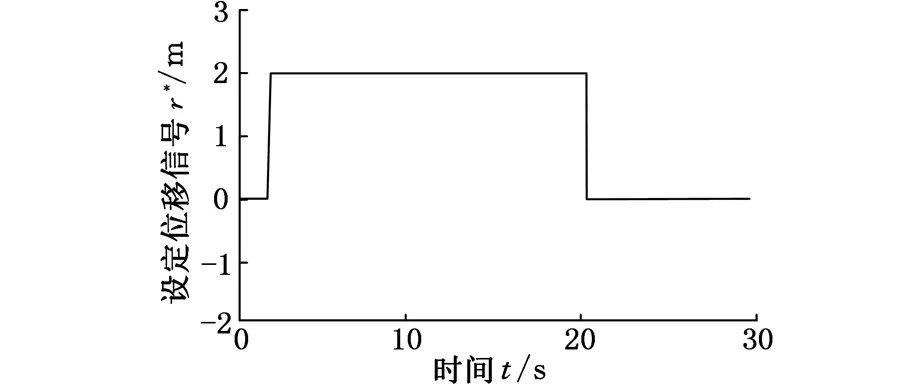
圖5 系統(tǒng)仿真時(shí)的輸入信號(hào)曲線
(a)液壓缸1的跟蹤誤差
(b)液壓缸2的跟蹤誤差
(c)液壓缸3的跟蹤誤差
通過(guò)對(duì)比主從同步控制方法和模糊相鄰耦合同步控制方法的仿真曲線可以看出,使用模糊相鄰耦合同步控制時(shí),四個(gè)液壓缸誤差波動(dòng)較小,并且在液壓缸加減速階段能快速將誤差降低,而主從同步控制方法作用下,在液壓缸加減速階段誤差波動(dòng)較大,并且后一個(gè)液壓缸的響應(yīng)速度和穩(wěn)定性要比前一個(gè)液壓缸差。
4 多缸調(diào)平實(shí)驗(yàn)研究
針對(duì)多缸調(diào)平系統(tǒng)模糊相鄰耦合同步控制原理進(jìn)行實(shí)驗(yàn)研究。實(shí)驗(yàn)裝置簡(jiǎn)圖見(jiàn)圖7。
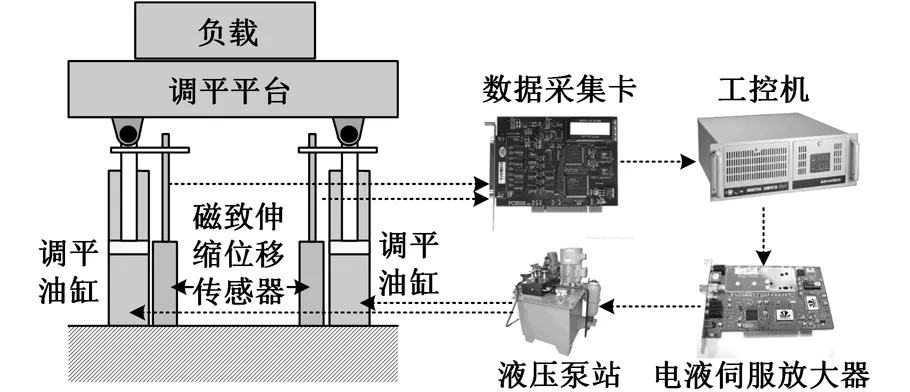
圖7 實(shí)驗(yàn)裝置簡(jiǎn)圖
使用MTC液壓缸內(nèi)置磁致伸縮位移傳感器測(cè)量液壓缸的伸縮位移,該種傳感器精度可達(dá)到0.01%,遲滯僅為0.5 ms,適用于速度達(dá)到10 m/s的高速液壓缸運(yùn)動(dòng)測(cè)量。使用數(shù)據(jù)采集卡將傳感器數(shù)據(jù)傳送至工控機(jī),工控機(jī)內(nèi)設(shè)定的控制程序控制電液伺服放大器,使液壓泵站驅(qū)動(dòng)液壓缸動(dòng)作。實(shí)驗(yàn)裝置的基本參數(shù)和仿真模型中一致。
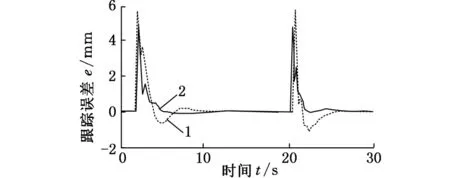
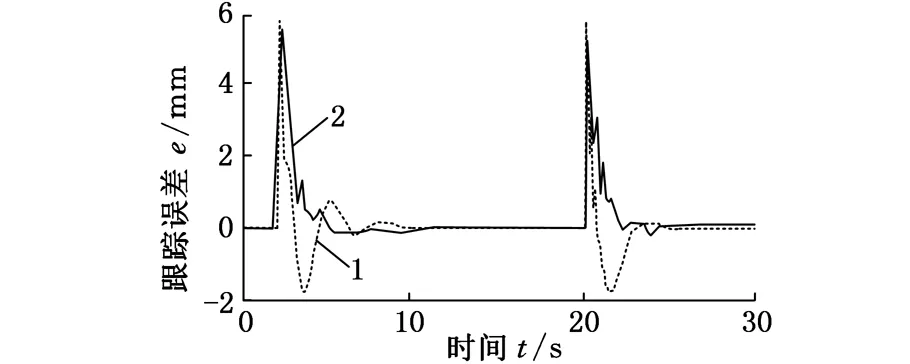
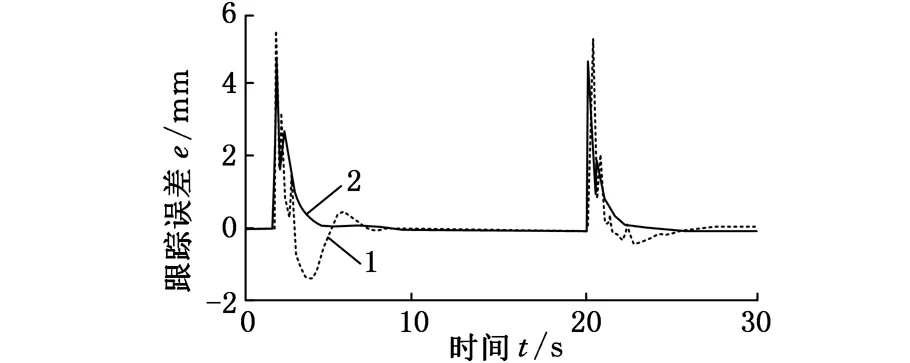
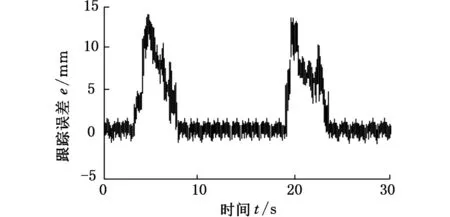
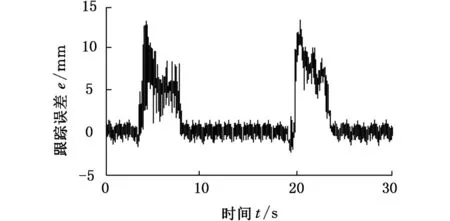
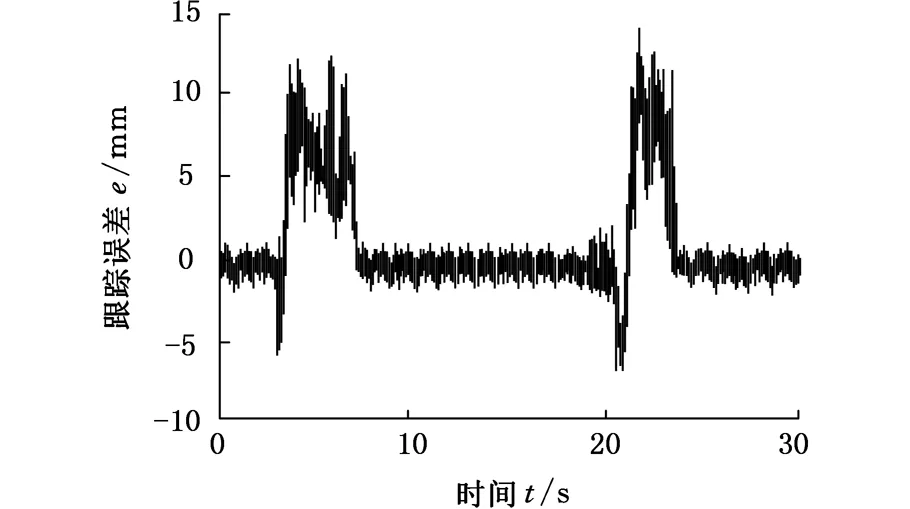
同樣使用主從同步控制方法進(jìn)行對(duì)比分析,實(shí)驗(yàn)結(jié)果如圖8和圖9所示。
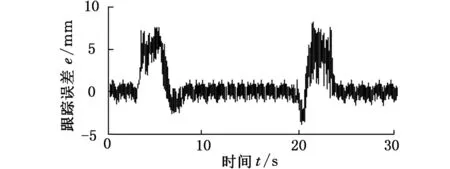
(a)液壓缸1的跟蹤誤差
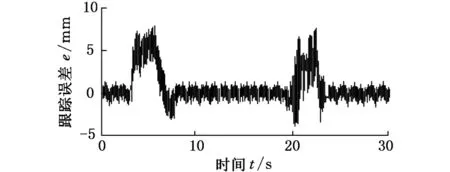
(b)液壓缸2的跟蹤誤差
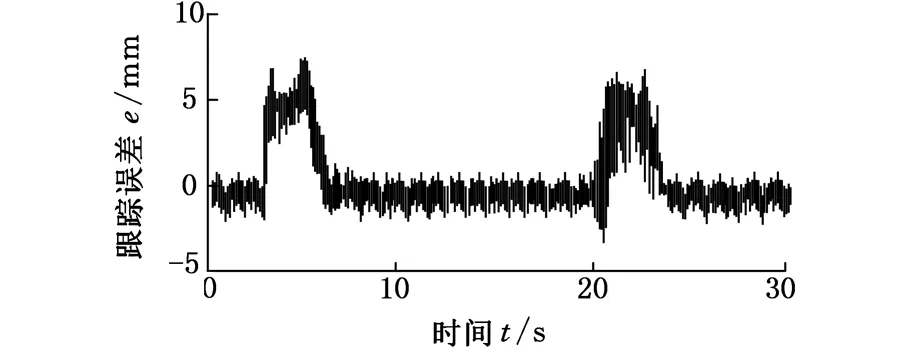
(c)液壓缸3的跟蹤誤差
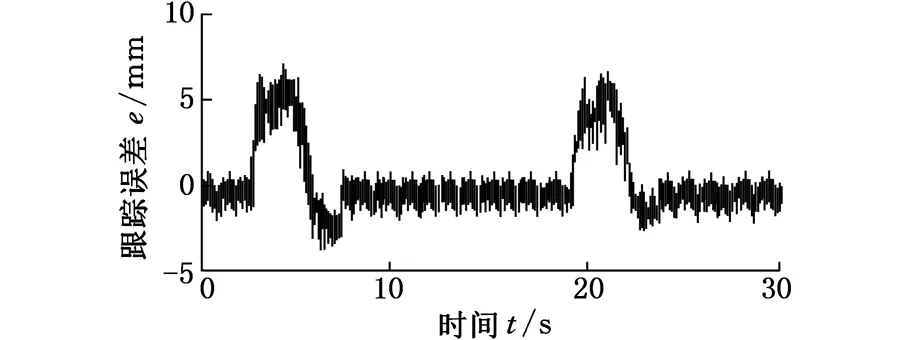
(d)液壓缸4的跟蹤誤差圖8 采用模糊相鄰耦合同步控制方法時(shí)的跟蹤誤差
通過(guò)對(duì)比主從同步控制方法和模糊相鄰耦合同步控制方法的實(shí)測(cè)曲線可以看出,其基本趨勢(shì)與仿真結(jié)果相似,采用主從同步控制方法時(shí),液壓缸的最大跟蹤誤差達(dá)到14.8 mm,采用模糊相鄰耦合同步控制時(shí),液壓缸的最大跟蹤誤差為7.8 mm。液壓缸勻速運(yùn)動(dòng)時(shí),兩種控制方法作用下液壓缸跟蹤誤差相差不大。
(a)液壓缸1的跟蹤誤差
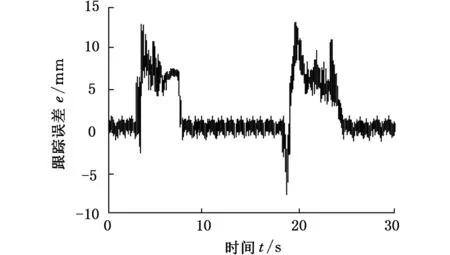
(b)液壓缸2的跟蹤誤差
(c)液壓缸3的跟蹤誤差
(d)液壓缸4的跟蹤誤差圖9 采用主從同步控制方法時(shí)的跟蹤誤差
5 結(jié)論
(1)針對(duì)調(diào)平系統(tǒng)的多液壓缸同步控制進(jìn)行研究,對(duì)調(diào)平系統(tǒng)受力及多缸控制系統(tǒng)進(jìn)行分析,建立了控制對(duì)象的非線性數(shù)學(xué)模型。
(2)研究了一種基于模糊相鄰耦合的控制方法,采用補(bǔ)償器將相鄰兩個(gè)液壓缸位置同步誤差融合到液壓缸控制器中,對(duì)于難以通過(guò)常規(guī)方法精確獲得的補(bǔ)償系數(shù),采用模糊PI控制算法獲取。
(3)通過(guò)MATLAB仿真和實(shí)驗(yàn)對(duì)模糊相鄰耦合的同步控制方法進(jìn)行測(cè)試,并采用主從同步控制方法進(jìn)行對(duì)比分析。結(jié)果表明,采用模糊相鄰耦合同步控制時(shí),四個(gè)液壓缸誤差波動(dòng)較小,并且在液壓缸加減速階段能快速將誤差降低,具有較好的同步控制性能。液壓缸勻速運(yùn)動(dòng)時(shí),兩種控制方法作用下液壓缸跟蹤誤差相差不大。
[1]陳永亮,王向偉,潘高峰,等.液壓支架試驗(yàn)臺(tái)電液多軸加載系統(tǒng)耦合調(diào)平控制[J].煤炭學(xué)報(bào),2011,36(10):1762-1767.
Chen Yongliang, Wang Xiangwei, Pan Gaofeng, et al. Coupling Leveling Controller Design of Electro-hydraulic Multi-axis Synchronous Loading for Hydraulic Support Test Rig[J]. Journal of China Coal Society, 2011,36(10): 1762-1767.
[2]董春芳,孟慶鑫.多缸電液調(diào)平系統(tǒng)相鄰交叉耦合同步控制[J].哈爾濱工程大學(xué)學(xué)報(bào),2012,33(3):366-370.
Dong Chunfang, Meng Qingxin. Synchronization Control of an Electro-hydraulic Leveling System Based on Adjacent Cross Coupling[J]. Journal of Harbin Engineering University, 2012,33(3): 366-370.
[3]王文軍,李斌,周博.一種主從改進(jìn)型輔助逆變器并聯(lián)控制方式研究[J].變頻器世界,2016(3):60-63.
Wang Wenjun, Li Bin, Zhou Bo. A Master-slave Modified Auxiliary Inverter Parallel Control Mode Study[J]. The World of Inverters, 2016(3):60-63.
[4]左智飛,沈文軒,黃志堅(jiān),等.基于LabVIEW的雙液壓缸同步控制系統(tǒng)的開(kāi)發(fā)[J].機(jī)床與液壓,2015,43(2):83-85.
Zuo Zhifei, Shen Wenxuan, Huang Zhijian, et al. Development of Double Hydraulic Cylinder Synchronization Control System Based on LabVIEW[J].Machine Tool & Hydraulics, 2015,43(2): 83-85.
[5]謝苗,劉治翔,毛君.綜掘巷道超前支護(hù)裝備多缸同步控制方法研究[J].工程設(shè)計(jì)學(xué)報(bào),2015,22(2):193-200.
Xie Miao, Liu Zhixiang, Mao Jun. Multi-cylinder Synchronous Control Method for Advanced Support of Roadway Support Equipment[J]. Chinese Journal of Engineering Design, 2015 ,22(2):193-200.
[6]趙梅玲.主從系統(tǒng)同步控制策略及應(yīng)用研究[D]. 合肥:合肥工業(yè)大學(xué),2012.
[7]鄧飆,蘇文斌,郭秦陽(yáng),等.雙缸電液位置伺服同步控制系統(tǒng)的智能控制[J].西安交通大學(xué)學(xué)報(bào),2011,45 (11):85-90.
Deng Biao, Su Wenbin, Guo Qinyang, et al. Intelligent Control for Electro-hydraulic Position Servo Synchronic Control System with Double Cylinder [J]. Journal of Xi’an Jiaotong University, 2011,45 (11):85-90.
[8]李志峰.電液位置伺服系統(tǒng)的多缸同步控制方法研究[D]. 太原:太原科技大學(xué),2010.
[9]倪敬,彭麗輝,項(xiàng)占琴. 有效容錯(cuò)控制及其在電液伺服同步系統(tǒng)中的應(yīng)用[J]. 中國(guó)機(jī)械工程,2010(11):1342-1347.
Ni Jing, Peng Lihui, Xiang Zhanqin. Effective Fault Tolerant Control on Electro Hydraulic Servo Synchro System [J]. China Mechanical Eng-ineering, 2010,21(11): 1342-1347.
[10]倪敬. 鋼管包裝電液伺服系統(tǒng)控制策略及其應(yīng)用研究[D]. 杭州:浙江大學(xué),2006.
[11]胥小勇,孫宇,蔣清海.改進(jìn)型相鄰耦合結(jié)構(gòu)的多電機(jī)比例同步控制[J].儀器儀表學(xué)報(bào),2012,33(6):1254-1260.
Xu Xiaoyong, Sun Yu, Jiang Qinghai. Improved Adjacent Cross-coupling Control Structure for Multi-motor Proportional Synchronization Control[J]. Chinese Journal of Scientific Instrument,2012,33(6):1254-1260.
[12]彭曉燕,劉威,張強(qiáng).基于改進(jìn)型偏差耦合結(jié)構(gòu)的多電機(jī)同步控制[J].湖南大學(xué)學(xué)報(bào)(自然科學(xué)版),2013,40(11):77-83.
Peng Xiaoyan, Liu Wei, Zhang Qiang. Synchronized Control of Multi-motor Based on the Improved Relative Coupling Control[J]. Journal of Hunan University(Natural Sciences),2013,40(11):77-83.
[13]肖海峰,李凱.改進(jìn)型相鄰耦合誤差的多電機(jī)同步控制策略[J].自動(dòng)化與儀器儀表,2014(9):148-149.
Xiao Haifeng, Li Kai. Multi Motor Synchronous Control Strategy Based on Improved Adjacent Coupling Error[J]. Automation & Instrumentation,2014(9):148-149.
[14]劉威.多電機(jī)同步控制技術(shù)在卷接機(jī)組中的應(yīng)用與研究[D]. 長(zhǎng)沙:湖南大學(xué),2013.
(編輯王旻玥)
Research on Fuzzy Adjacent Coupling Synchronization Control in Multi-cylinder Leveling System
Liu RuijiaChen Kai
Liaoning Technical University, Fuxin,Liaoning, 123000
A control method was studied based on fuzzy adjacent coupling for multi cylinder synchronous control of leveling system. Firstly, the leveling force system and multi cylinder control system were analyzed, a nonlinear mathematical model of the controlled objects was built. On the adjacent coupling controller design, a compensator was used to fuse the two adjacent hydraulic cylinder position synchronization error controller of hydraulic cylinder, and fuzzy PID control algorithm was used to get the exact compensation coefficient which was difficult to obtain by conventional method. Through the MATLAB simulation and experiments, the synchronous control method of fuzzy adjacent coupling was tested, and the control of the master slave coupling was used to compare and analyze the results. The results show that the error fluctuation of the four hydraulic cylinders is small, and the errors may be reduced quickly in the hydraulic cylinder plus deceleration phase, which has good synchronization control performance.
synchronization control; adjacent coupling; fuzzy control; leveling system
2015-04-28
遼寧省教育廳科學(xué)研究一般項(xiàng)目(L2012110);遼寧省大學(xué)生創(chuàng)新創(chuàng)業(yè)訓(xùn)練計(jì)劃資助項(xiàng)目(201310147046)
TD353
10.3969/j.issn.1004-132X.2016.17.008
劉芮葭,男,1975年生。遼寧工程技術(shù)大學(xué)機(jī)械工程學(xué)院副教授。主要研究方向?yàn)楣I(yè)工程、企業(yè)管理。發(fā)表論文10余篇。陳凱(通信作者),男,1980年生。遼寧工程技術(shù)大學(xué)機(jī)械工程學(xué)院講師。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
兒童故事畫(huà)報(bào)(2019年5期)2019-05-26 14:26:14
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長(zhǎng)指南(2015年7期)2015-08-11 15:03:12
