一種基于MAP噪聲估計器的低成本SINS/GPS的快速UKF算法
2016-10-11 09:25:45卿常允艷
四川文理學院學報 2016年5期
關鍵詞:系統
戴 卿常允艷
(1.重慶水利電力職業技術學院建筑工程系,重慶永川402100,2.信息工程大學空間地理信息學院,河南鄭州 450000;3.中南大學地球科學與信息物理學院,湖南長沙 410083)
?
一種基于MAP噪聲估計器的低成本SINS/GPS的快速UKF算法
戴卿1,2常允艷1,3
(1.重慶水利電力職業技術學院建筑工程系,重慶永川402100,2.信息工程大學空間地理信息學院,河南鄭州 450000;3.中南大學地球科學與信息物理學院,湖南長沙 410083)
為進一步提高平方根無跡卡爾曼濾波(SR-UKF)在低成本捷聯慣導(SINS)/衛星導航(GPS)組合系統中的算法精度和實時性,針對系統隨機模型的噪聲統計特征不確定性和協方差平方根矩陣的復雜性,結合最大后驗估計(MAP)和矩陣奇異值分解(SVD)理論建模,提出了一種基于MAP噪聲估計模型的快速UKF算法.通過對SINS/GPS組合導航系統的仿真實驗,研究表明:相比于傳統UKF算法,新算法能夠有效減小噪聲統計模型不確定時對導航精度的制約,提高算法魯棒性,同時降低傳統UKF算法的時間復雜度,提高數據更新實時性.
組合導航;非線性濾波;噪聲統計估計器;SVD奇異值分解;快速UKF算法
現代化導航服務中,微機電捷聯式慣性導航(SINS)和衛星導航系統(GPS)優勢互補的SINS/GPS組合導航技術具有重量輕、體積小、性能好的特點,實用價值優越,被廣泛應用于軍事和民用領域.然而導航系統環境中不確定因素的干擾,會影響導航效果,因此噪聲影響下的非線性系統狀態估計問題,成為近幾年眾多導航學者的研究熱點.[1-3]
INS/GPS組合導航的非線性濾波常采用擴展卡爾曼濾波算法(EKF),通過泰勒一階線性化系統模型來進行近似函數逼近,但由于截斷誤差的存在可能導致濾波精度降低甚至發散.[4]確定性采樣濾波算法利用sigma點對函數概率密度函數的逼近易于非線性函數的特點,克服局部線性化和Jacobin矩陣計算的問題,提高濾波精度到二階以上,但卻不能抵制復雜系統中噪聲的影響.[5]自適應抗差UKF算法,利用比例因子調節濾波增益,但自適應因子的選取需要一定的經驗型.[6]為避免因舍入誤差導致的數值不穩定問題,避免矩陣求逆操作,有學者提出求根UKF算法,提高了算法數值穩定性方面做出了較大貢獻.[7]
本文在此研究基礎之上,通過SVD的奇異值分解引入到平方根狀態協方差矩陣計算中,并利用MAP估計下的時變噪聲統計器改善系統在時間更新和量測更新中的噪聲自適應能力,得到了帶噪聲估計器的SVD-UKF算法,將該算法應用到SINS/GPS組合導航系統中,在保證濾波精度的同時,大大減小了計算負擔.
1 低成本SINS/GPS導航系統
松散耦合系統中慣導和衛星導航單元獨立,采用GPS輔助SINS的工作方式,提供具備一定冗余度的高數據率位置、速度和姿態導航信息,是一種較理想的低成本高效導航技術.[8]
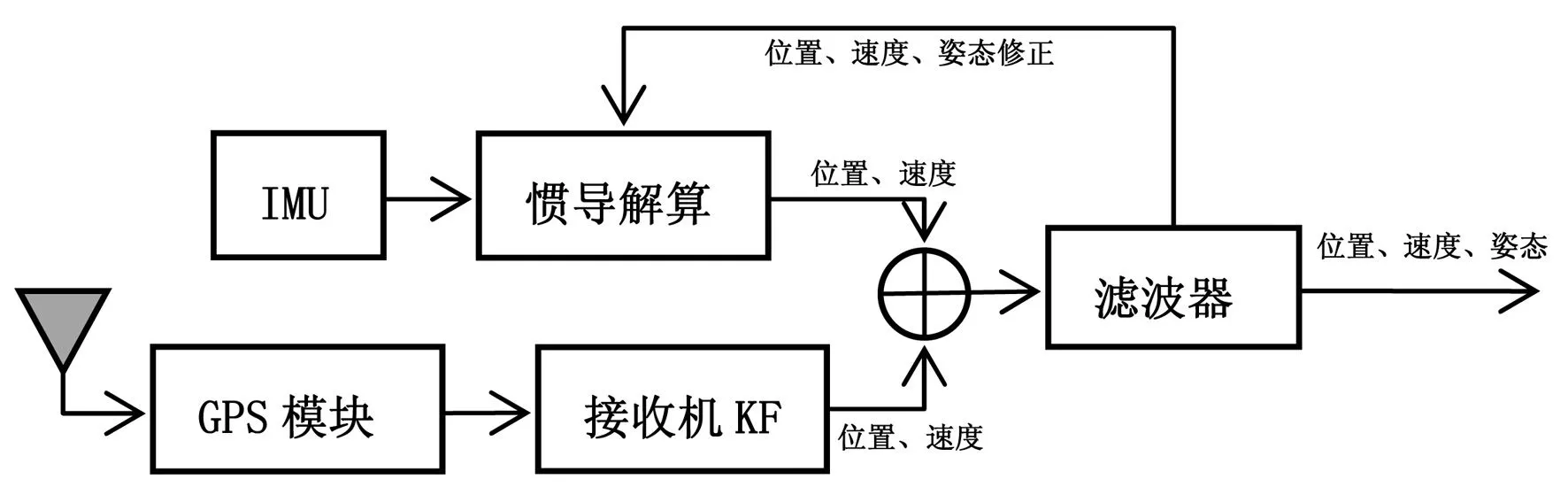
圖1 松耦合組合導航系統
1.1松耦合系統狀態方程
在低成本SINS/GPS松耦合系統中,量測信息采用SINS解算的位置和速度與GPS測量得到的位置和速度之差,無需增加組合系統中GPS狀態變量,因此該模式下導航系統的狀態方程可表達如下
(1)
其中FI為對應的狀態轉移矩陣,XI為SINS的狀態變量,包含位置誤差、速度誤差、姿態誤差角、加速度計零偏誤差、陀螺儀漂移誤差,GI為系統噪聲分配矩陣,WI=[ωgxωgyωgzωaxωayωaz]T為系統噪聲.[9]
1.2松耦合系統量測方程
在松耦合系統量測方程中,量測信息為慣導與GPS的位置差和速度差,位置誤差量測方程和速度量測方程分別為
(2)
(3)


(4)
2 帶噪聲估計器的SVD-UKF算法
在非線性系統中
(5)
(6)
式中狀態轉移矩陣Mk,k-1和觀測矩陣Hk均為非線性,uk和vk狀態方程的量測方程的噪聲.
產生sigma點2lk-1+1個
(7)

(8)
時間更新:
xbk={xbk,i:xbk,i=Mk,k+1(xak-1,i),i=0,1,…2lk-1}
(9)
(10)
(11)
(12)
其中,
(13)
(14)
wαβk-1,0=wk-1,?0+1+β-α2
(15)
量測更新
(16)
(17)
其中,
(18)
(19)
(20)
σ2k,i
(21)
Γk為閾值,為避免lk過大或過小,設值域lllklu,時變噪聲估計統計器(次優無偏MAP估計器):
(22)
(23)
(24)
(25)
(26)
3 算法性能分析

基于極大后驗估計原理的帶噪聲統計估計器的UKF算法,通過遞推方程對導航系統噪聲和量測噪聲的數學統計特性實時修正與估計,實現噪聲均值和協方差的無偏估計,最終解決了噪聲統計特性未知或不準確帶來的濾波發散問題,提高UKF濾波算法的穩健性.
4 實驗分析
以地面動態為載體的濾波仿真系統,動態數據通過動態仿真與導航傳感器測量誤差數據合并的方式獲取,其慣導單元與GPS接收機測量誤差數據在實測數據中獲得.衛星可見數目如圖2所示與慣導測量狀況如圖3-5所示.GPS測速誤差為0.5m/s,定位誤差為5m,陀螺噪聲的均方根0.5(°)/s,加速度計噪聲的均方根10一3g.慣導輸出周期為0.01s,UKF算法濾波周期為1s,仿真時間1800s,校正方式為反饋校正,校正周期為1s.
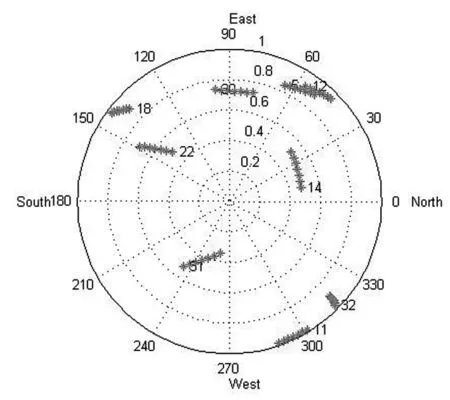
圖2 衛星可見顯示圖

圖3 翻滾角量測
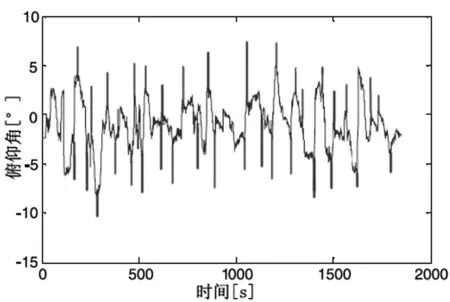
圖4 俯仰角量測
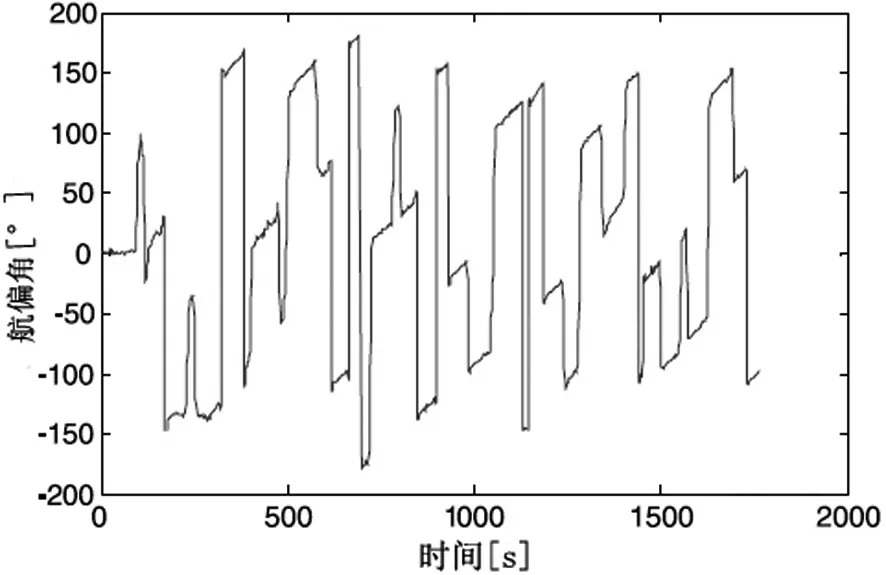
圖5 航偏角量測
粒子濾波技術(PF)是貝葉斯遞推框架下的不受非線性和高斯假設限制的非線性非高斯噪聲系統濾波,計算量較大,但濾波性能好.因此本文為證明新算法的濾波性能,把UKF和PF作為實驗對照項.通過仿真實驗,平面位置誤差結果如圖6和圖7所示,三種濾波方法在平面位置上的定位結果較接近,MAP-SVD-UKF和PF略優于UKF.速度誤差如圖8和圖9所示,MAP-SVD-UKF和PF輸出精度較高,明顯優于UKF算法.姿態誤差如圖10和圖11所示,通過X和Y方向上的姿態測量結果分析發現,MAP-SVD-UKF和PF明顯優于UKF算法.
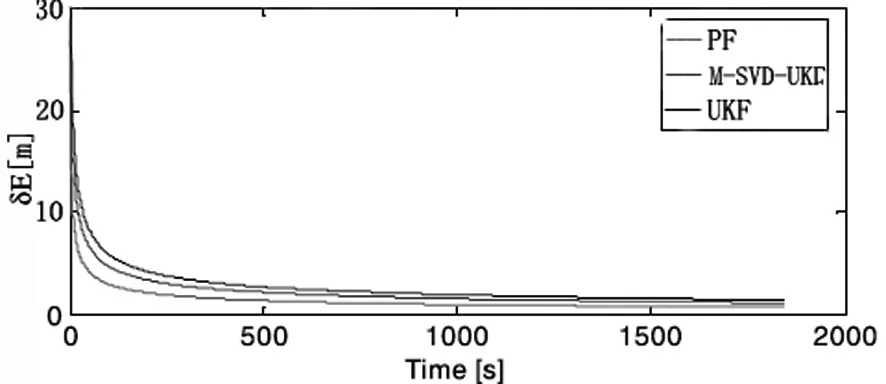
圖6 東向位置定位誤差
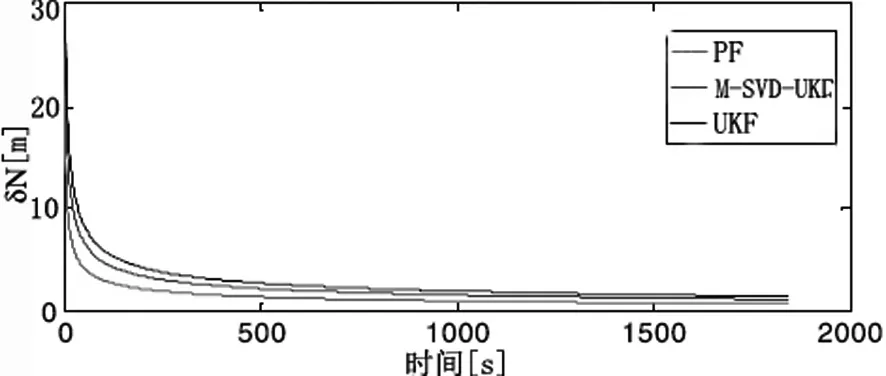
圖7 北向位置定位誤差
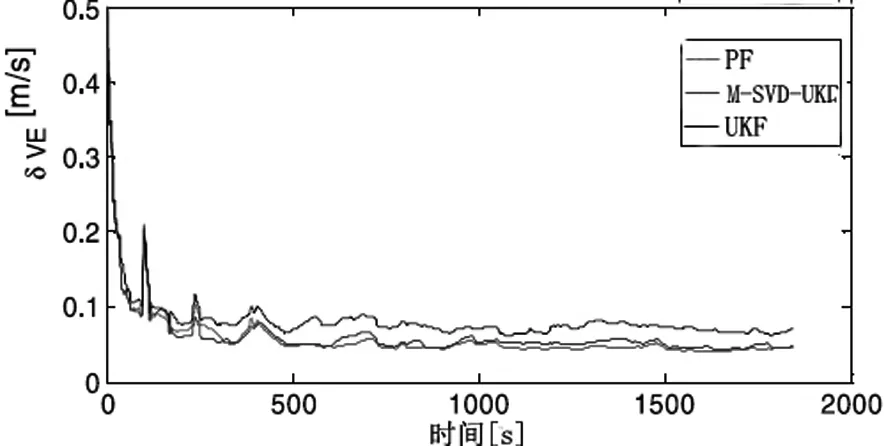
圖8 東向速度誤差

圖9 北向速度誤差

圖10 x方向姿態誤差
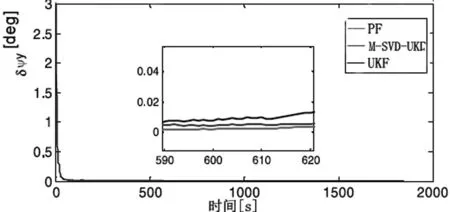
圖11 y方向姿態誤差
由上圖可知,基于MAP噪聲估計器的SVD-UKF濾波算法穩定性較好,位置、速度和姿態誤差較小,導航定位精度較高.新算法雖比PF算法在精度上有一定的損失,但相比傳統UKF算法性能提升較大.因此,M-SVD-UK算法在能提供高精度導航結果的同時,計算時間復雜度相比傳統UKF算法和PF算法要小,對動態導航定位定姿信息的輸出實時性較好.
5 結論
本文通過基于UKF框架下的松組合SINS/GPS組合導航系統研究,結合MAP估計準則下的時變噪聲統計估計器模型和SVD奇異值分解算法,對傳統UKF算法進行改進,實現了一種具備噪聲自適應估計的快速UKF算法.將本文提出的新算法,應用于低成本SINS/GPS組合導航仿真實驗系統中,仿真結果驗證了新濾波算法的有效性,采用該算法可以在有效改善噪聲影響下濾波定位結果的同時,提高計算實時性,有效解決高動態載體的濾波狀態估計問題.
[1] 楊元喜.自適應動態導航定位[M].北京:測繪出版社,2006:23.
[2] 張秋昭,張書畢,劉志平,等.基于奇異值分解的魯棒容積卡爾曼濾波及其在組合導航中的應用[J].控制與決策,2014(2):341-346.
[3] 高博,黃耀光,李建新.基于自適應UKF的單站無源定位算法[J].信息工程大學學報,2012(5):578-582.
[4] 常國賓,許江寧.一種新的混合迭代UKF[J].武漢大學學報:信息科學版,2012(6):701-703.
[5] 謝愷, 金波, 周一宇. 基于迭代測量更新的UKF方法[J]. 華中科技大學學報:自然科學版,2007(11): 13-16.
[6] 王小旭,趙琳,夏全喜,等.基于Unscented變換的強跟蹤濾波器[J].控制與決策,2010(7):1063-1068.
[7] 崔乃剛,韓鵬鑫,穆榮軍.基于強跟蹤UKF的導航系統故障檢測方法[J].哈爾濱工程大學報,2011(10):1295-1299.
[8] 楊文博,李少遠.基于強跟蹤UKF的航天器自主導航間接量測濾波算法[J].系統工程與電子技術,2011(11):2485-2491.
[9] Ge Q b,Xu D X,Wen C L.Cubatureinformationfilterswithcorrelatednoisesandtheirapplicationsindecentralizedfusion[J].Signal Processing,2014(94):434-444.
[責任編輯范藻]
A Fast UKF Algorithm Based on MAP Noise Estimator for Low Cost SINS / GPS System
DAI Qing1, 2,CHANG YunYan1, 3
(1. Architectural Engineering Deptment of Chongqing Water Resources and Power Technology College, Chongqing 402100;2. Spatial Geography Information School of Information Engineering University, Zhengzhou Henan 450000;3. Earth Science and Information Physics School of South-Center University, Changsha Hunan 410083, China)
To further improve the performance of unscented Kalman filter (UKF) algorithm in SINS/ GPS navigation system, an improved UKF filtering based on the MAP and SVD algorithm is discussed in this paper. The new algorithm is solved the statistical noise characteristics of the system stochastic model uncertainty and complexity of the square root of the covariance matrix. The simulation experiment results of SINS / GPS integrated navigation system shows that compared with the traditional UKF algorithm, the new algorithm implement in SINS/GPS integrated navigation system could improve navigation accuracy, increase system robustness,and speed up the frequency of update data.
SINS/GPS; nonlinear filtering; noise statistics estimator; SVD
2016-05-25
渝水職院重點項目(K201514、2015006、K201510)
戴卿(1985—),男,河南洛陽人.講師,博士,主要從事非線性非高斯濾波與組合導航數據處理研究.
TN96
A
1674-5248(2016)05-0039-05
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
