旋轉倒立擺的起擺與穩擺研究與實現
2016-10-12 06:54:44姜香菊劉二林
自動化儀表 2016年9期
關鍵詞:系統
姜香菊 劉二林
(蘭州交通大學自動化學院1,甘肅 蘭州 730070;蘭州交通大學機電學院2,甘肅 蘭州 730070)
?
旋轉倒立擺的起擺與穩擺研究與實現
姜香菊1劉二林2
(蘭州交通大學自動化學院1,甘肅 蘭州730070;蘭州交通大學機電學院2,甘肅 蘭州730070)
針對倒立擺系統的起擺與穩擺問題,利用Lagrange方程建立了單擺與倒立擺的完整數學模型。采用正反饋控制算法進行單擺的起擺控制,采用雙PID算法進行倒立擺的穩擺控制。設計了基于擺桿角度和角速度的兩種能量控制切換模式,并進行了仿真驗證和實物驗證。仿真和實際運行結果表明,所設計的針對角速度的正反饋控制器起擺速度更快,所提出的兩種切換模式可以使控制更穩定。
正反饋控制器雙PID旋轉倒立擺單擺起擺穩擺動力學分析Lagrange方程
0 引言
倒立擺系統是一個不穩定、多變量、強耦合的欠驅動非線性機械系統,可以作為典型的控制對象進行研究。倒立擺的種類很多,有直線倒立擺、旋轉倒立擺等。旋轉倒立擺受力分析較其他倒立擺復雜,具有不穩定性及非線性,對控制算法有更高的要求[1-2]。
本文采用直流電機、減速機構、微控制器、電機驅動芯片和1 024線小型位置式編碼器等,設計了一個一級旋轉倒立擺;同時,利用Lagrange方程對系統進行了動力學分析,建立了單擺和倒立擺的數學模型,設計了起擺和穩擺控制器。將設計的控制器移植到微控芯片中進行實際測試,結果表明,設計的系統機械結構合理、響應速度快、魯棒性好[3-14]。
1 旋轉倒立擺基本結構
倒立擺簡化模型如圖1所示[3-5]。
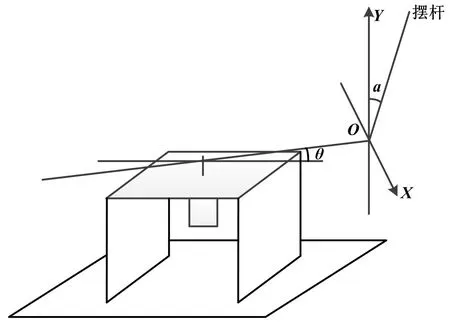
圖1 倒立擺簡化模型
旋轉倒立擺主要由微控制器芯片、支撐機架、擺桿、旋臂、小型直流電機、減速器、1 024線位置式編碼器和H橋電路(BT7960)組成。
旋轉倒立擺的旋臂與減速器的旋轉軸連接,直流電機驅動減速器輸出動力,將高速低扭矩旋轉轉換為低速高扭矩旋轉;位置式編碼器1的齒輪與減速器輸出軸的齒輪嚙合,用來檢測旋轉臂轉過的角度,為旋臂位置PID控制提供實時數據;位置式編碼器2安裝在旋轉臂末端,并通過轉軸與擺桿連接,為擺桿角度PID控制提供實時數據。
2 旋轉倒立擺數學模型
對于倒立擺系統,當倒立擺處于單擺狀態時,系統為穩定系統;當系統處于倒立擺狀態時,系統為不穩定系統。倒立擺系統的整個運行過程包括:①對穩定的單擺進行控制,使其脫離穩定狀態,并盡快擺至最上方,且角速度接近于0,以達到倒立要求;②對不穩定的倒立擺進行控制,使其穩定直立。所以,整個系統模型應該包括單擺模型和倒立擺模型。
對于倒立擺系統,擺桿有一個自由度α、旋轉臂有一個自由度θ,可分別令α和θ為廣義坐標系。分析能量組成,可得:
T=T1+T2+T3+T4
(1)

(2)
(3)
(4)
對式(3)進行處理,得式(5):
(5)

對式(4)進行處理,得式(6):
(6)
將式(5)、式(6)聯立得式(7),式(7)即為該系統的線性化狀態方程。
(7)
式中:N1=-0.224 6;N2=2.969 7;N3=-0.008 7;N4=-0.679 5;N5=-95.454 5;N6=-0.278 3;N7=4.887 3;N8=4.363 6。
狀態方程中各參數如表1所示。
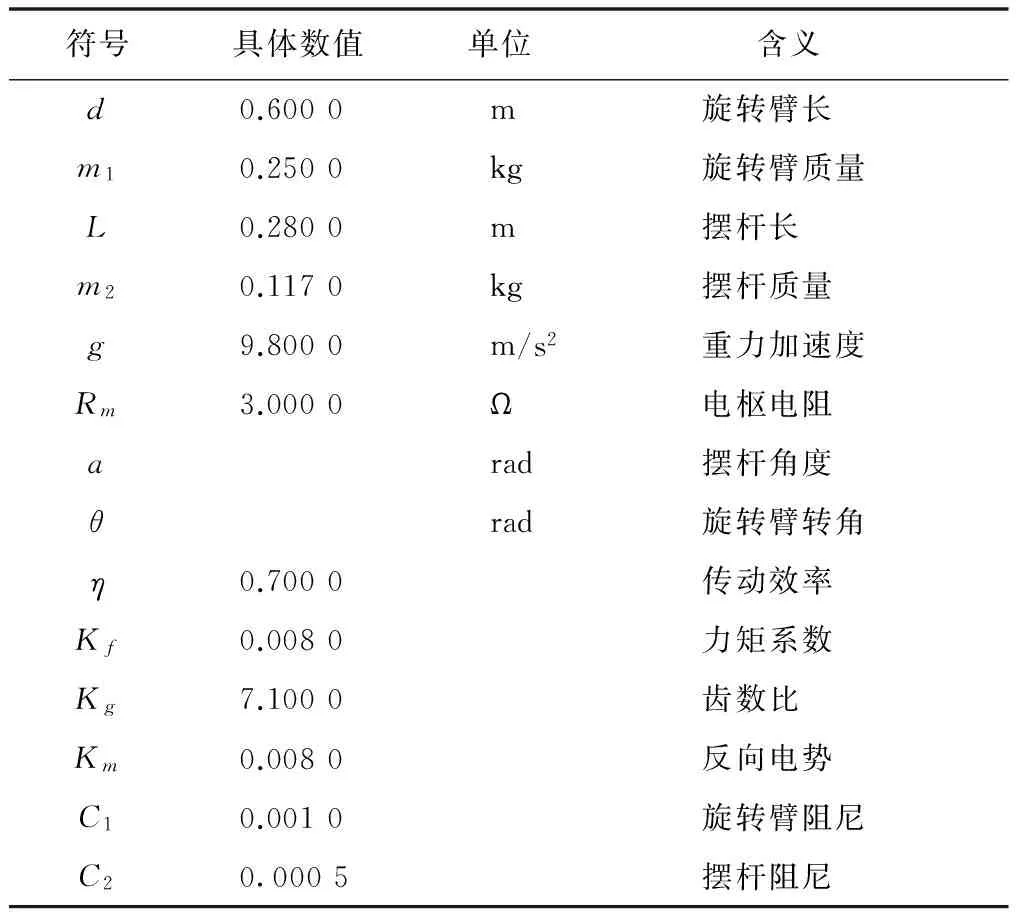
表1 狀態方程中各參數列表

(8)
3 旋轉倒立擺控制器設計
3.1單擺的起擺控制
單擺的起擺問題是控制理論中的一個經典問題。文獻[8]利用Bang-Bang控制使單擺擺起,但是由于在控制時沒有考慮擺桿角速度的問題,會造成能量的損失,使起擺速度較慢。文獻[9]對單擺的起擺問題進行了探討,并利用能量反饋方法來完成倒立擺的起擺控制,效果良好。文獻[9]的控制規律Vm=n×g×sign(a×cosα)是根據單擺基于能量模型得到的。
針對建立的單擺數學模型,可以利用針對角速度的正反饋比例控制算法,使其迅速震蕩起來。
其控制規律為:
(9)
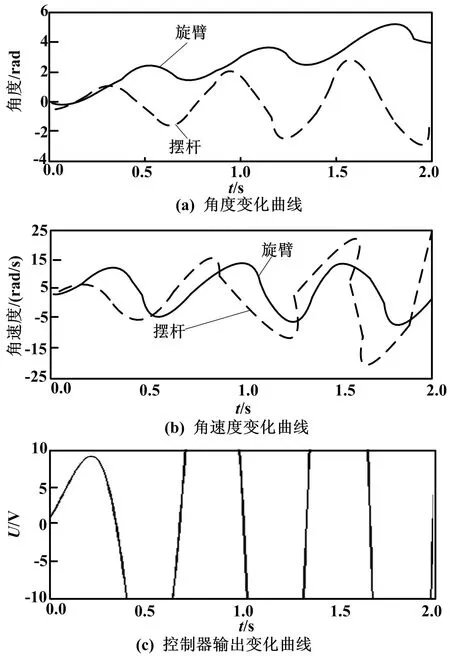
圖2 單擺控制系統仿真曲線圖
通過圖2可以看出,擺桿在1.5 s時,擺起角度已經接近3.14 rad,即經過1.5 s,單擺就能達到擺起要求。由于模型中擺桿初始角度的存在,所以旋臂會朝著一個方向旋轉。同時,由于仿真時輸出限幅為-10~+10 V,所以再增大K,控制效果也無明顯變化。
通過仿真可知,基于式(9)的起擺方法較Bang-Bang控制等傳統方法效果更好[8]。
3.2倒立擺的穩定控制

為了實現控制目標,采用雙PID控制。在控制器中,控制器1對倒立擺擺桿的角度α進行控制,控制器輸出極性為正;控制器2對旋臂的角速度θ進行控制,控制器輸出極性為負。
雙PID控制仿真系統結構如圖3所示。
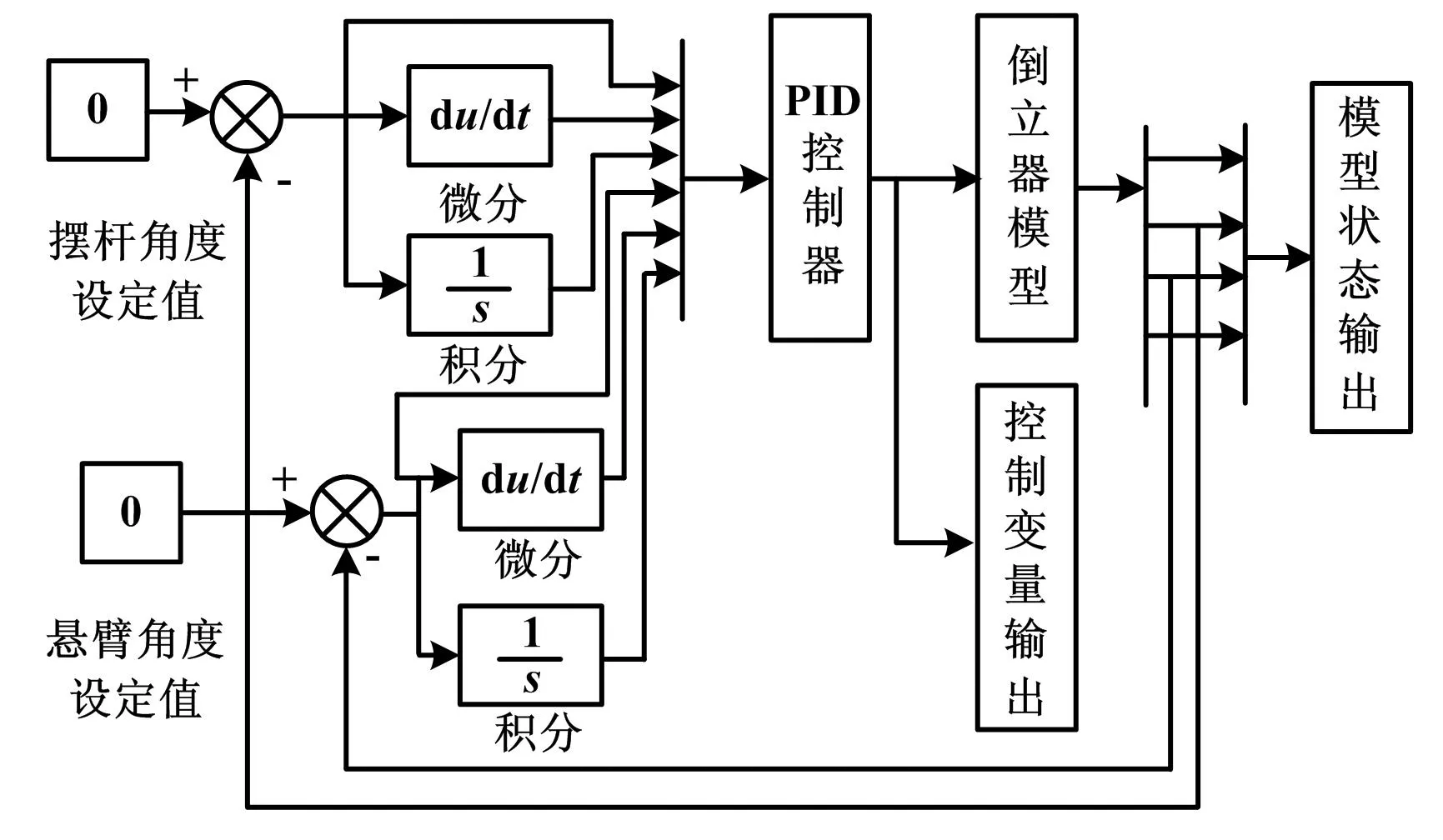
圖3 雙PID控制仿真系統結構圖
在仿真過程中,取Kp1=100、Kd1=0、Ki1=0、Kp2=2.2、Kd2=0.08、Ki2=0.01。
控制器2輸出的電壓值限幅范圍為:-5~+5 V,控制器總體輸出的電壓值限幅范圍為:-10~+10 V。
在控制切換時,倒立擺有以下兩種模式:
①僅考慮擺桿角度,在|α|=0.175 rad時進行切換。在模型中,令α=-0.175 rad、a=0 rad/s,其仿真結果見圖4(a)~圖4(d)所示。
②考慮擺桿角度及角速度,在擺桿的動能和勢能之和接近2m2gL時進行切換。在模型中,令α=-0.175 rad、a=1.728 rad/s,仿真結果見圖4(e)~圖4(h)。
通過對兩種不同控制切換方式的仿真結果對比可以看出:當采用方式2對控制方式進行切換時,擺桿幾乎沒有超調,旋臂旋轉幅度非常小[9-12]。
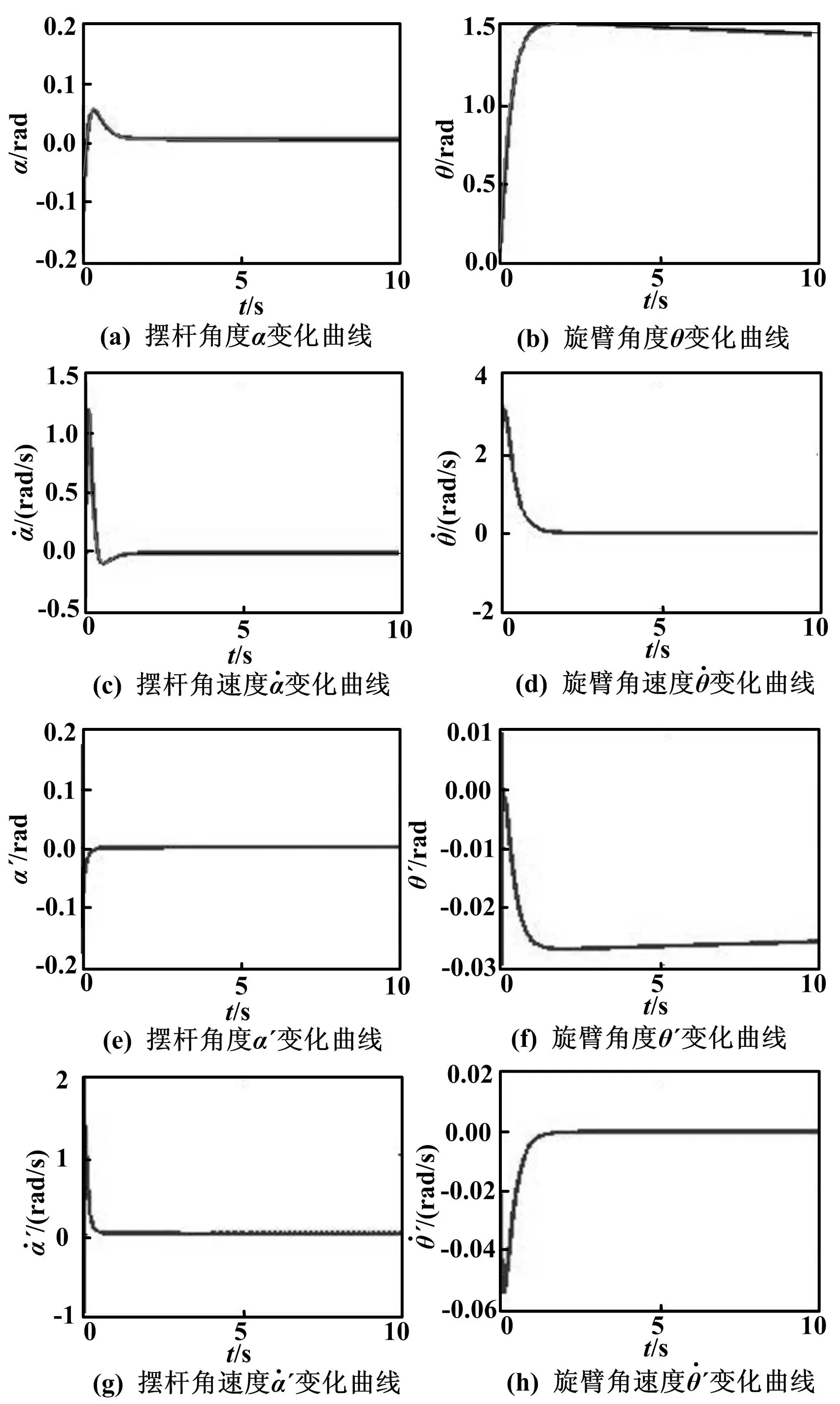
圖4 控制切換模式仿真結果圖
4 旋轉倒立擺實際運行數據分析
將控制算法移植到FreescaleXS128單片機中,通過上位機,對擺桿的角度及旋轉轉臂的角速度進行監控。倒立擺運行波形圖如圖5所示。
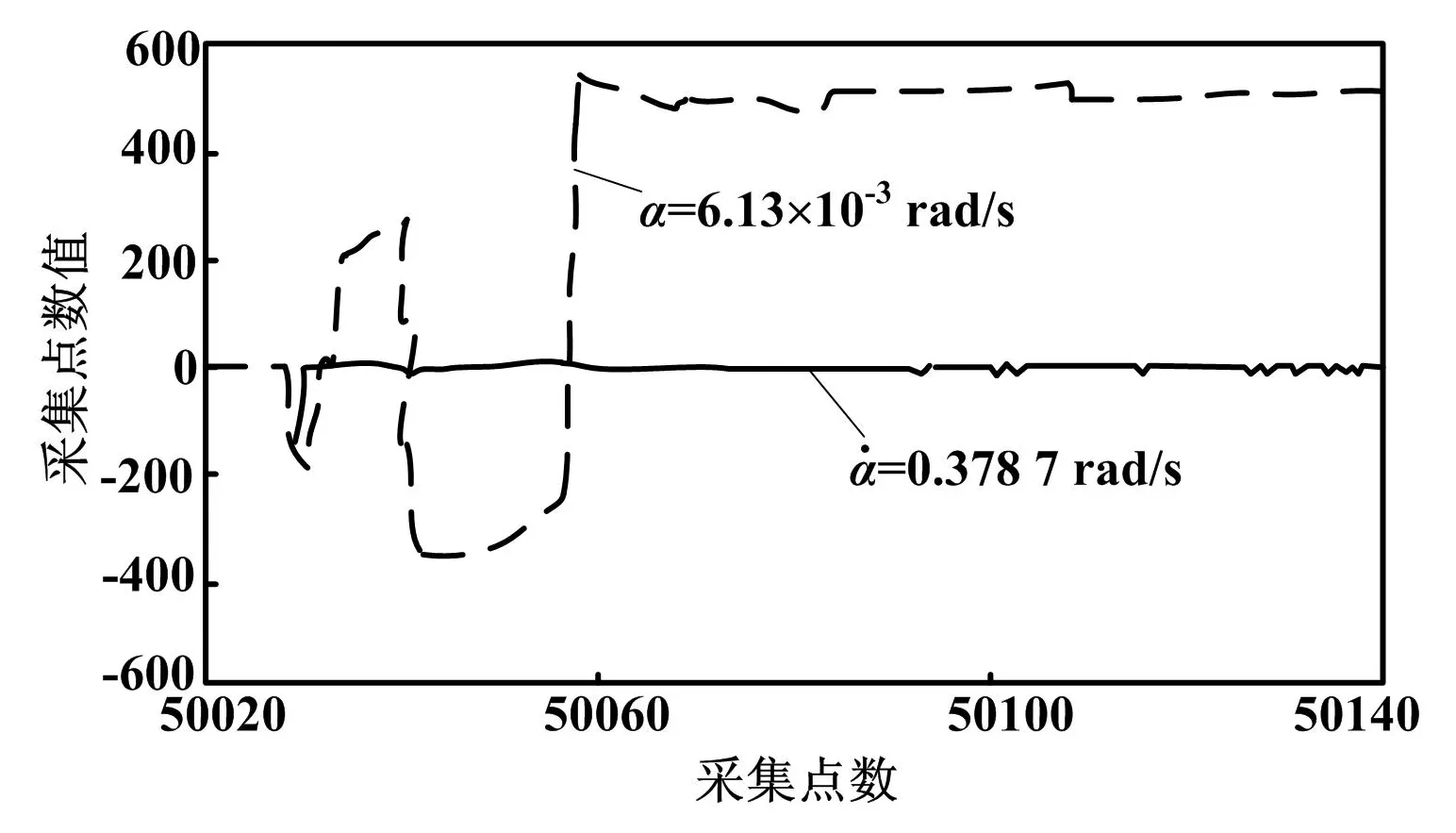
圖5 倒立擺運行波形圖
在倒立擺系統運行之初,系統角度為0;在起擺控制方式下,系統開始震蕩;在震蕩2次以后,系統角度達到倒立擺控制的要求,系統進入穩擺控制模式,倒立擺擺桿被穩定控制在直立位置。由于系統傳動齒輪的嚙合問題及傳感器精度和安裝問題,倒立擺穩擺后擺桿有些震蕩。
在實際運行時,對兩種不同的起擺、穩擺控制切換方式進行對比,在相同電壓(8.2 V)下,基于能量原則的起擺切換方式需要的電流更小。
5 結束語
利用Lagrange方程,建立了單擺數學模型及倒立擺數學模型。采用針對角速度的正反饋比例控制算法,可以使穩定的單擺系統震蕩,迅速達到倒立擺的起擺要求。該算法較Bang-Bang控制等算法起擺更迅速;使用雙PID控制算法使倒立擺穩擺,并對兩種不同的控制切換方法進行了對比。與常規切換方式相比,基于能量原則的控制切換方式可以使控制更穩定。
[1] 吳愛國,張小明,張釗.基于Lagrange方程建模的單級旋轉倒立擺控制[J].中國工程科學,2005,7(10):11-15.
[2] AWTAR S,KING N,ALLEN T,et al.Inverted pendulum systems: rotary and arm-driven-a mechatronic system design case study[J].Mechatronics,2002,12(2):357-370.
[3] 張朝陽,魏曉赟,王少峰.基于52單片機的旋轉倒立擺的研究和與設計[J].廊坊師范學院學報(自然科學版),2014,14(4):49-52.
[4] HUANG N C,GANG W,WANG Y,et al.The rotational inverted-pendulum based on DSP controller[C]//Proceeding of the 4th World Congress on Intelligent Control and Automation,China Shanghai,2002:3101-3105.
[5] 劉二林,姜香菊.單級旋轉倒立擺運動控制研究[J].制造業自動化,2015,37(7):48-51.
[6] 張欣.單級旋轉倒立擺的二次型最優控制研究[J].電腦開發與應用,2011,24(12):28-29,32.
[7] 劉二林,姜香菊.基于雙PID的旋轉倒立擺控制系統設計與實現[J].制造業自動化,2015,37(6):139-142.
[8] 姜倩,管鳳旭.旋轉式倒立擺的鎮定和擺起控制的研究[J].哈爾濱商業大學學報(自然科學版),2007,23(3):232-234.
[9] 潘笑,肖書書,張俊,等.倒立擺擺起的能量控制算法研究及仿真[J].微計算機信息,2008,24(31):261-262.
[10]江晨,王富東.旋轉式倒立擺系統的算法研究及仿真[J].工業控制計算機,2010,23(5):54-56.
[11]陳進,王冠凌,邢景虎.單級倒立擺的PID和模糊控制對比研究[J].自動化與儀器儀表,2009(2):17-18.
[12]曹敏,徐凌樺.單神經元PID算法在倒立擺控制系統中的應用[J].微計算機信息,2009,25(1):70-71.
[13]楊平,徐春梅,曾婧婧,等.PID控制在倒立擺實時控制系統中的應用[J].微計算機信息,2006,22(19):83-85.
[14]劉二林,姜香菊.倒立擺擺桿角度檢測裝置的設計與實現[J].測控技術,2015,37(12):9-12.
ResearchandImplementationoftheSwing-upandStabilizingOperationforRotationalInvertedPendulum
Inordertosolvetheswing-upandstabilizingissuesfortheinvertedpendulum,thecompletemathematicalmodelsforsimplependulumandinvertedpendulumarebuiltbasedonLagrangeequation.Thepositivefeedbackcontrolalgorithmisusedforcontrollingswing-upofthesimplependulum,andthedual-PIDalgorithmisusedtocontrolstabilizingoperationoftheinvertedpendulum.Theenergycontrolswitchingoverbasedonangleofswinglinksandangularvelocityisdesigned,andthesimulationverificationandphysicalverificationareconducted.Theresultsofemulatedandphysicaloperationshowthatthepositivefeedbackcontrollerdesignedforangularvelocitymakesfasterswing-up,Theproposedtwokindsofswitchingmodemakemorestablecontrol.
PositivefeedbackcontrollerDualPIDRotationalinvertedpendulumSimplependulumSwingupStabilizingpendulumDynamicsanalysisLagrangeequation
姜香菊(1979—),女,2003年畢業于蘭州交通大學自動控制專業,獲碩士學位,副教授;主要從事計算機控制及傳感器技術等方向的研究。
TH-3;TP13
ADOI:10.16086/j.cnki.issn1000-0380.201609002
甘肅省高等學校科研基金資助項目(編號:2014-A-041)。
修改稿收到日期:2016-02-17。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32