搜尋者優化算法與卡爾曼濾波相結合的PID控制
2016-10-12 06:54:46劉俊
自動化儀表 2016年9期
劉 俊
(商洛學院電子信息與電氣工程學院,陜西 商洛 726000)
?
搜尋者優化算法與卡爾曼濾波相結合的PID控制
劉俊
(商洛學院電子信息與電氣工程學院,陜西 商洛726000)
針對傳統PID控制器的參數整定依靠經驗調整,且在控制過程中,系統易受多種噪聲影響的問題,提出搜尋者優化算法與卡爾曼濾波相結合的PID控制方法。利用搜尋者優化算法對PID參數進行智能優化,利用卡爾曼濾波器實現對控制噪聲和測量噪聲的有效抑制。對二階延遲系統進行仿真試驗,結果表明,與傳統PID控制方法相比,該方法可以智能地獲得較優的PID參數,有效剔除了控制過程中的噪聲干擾,實現了調節速度快、穩態誤差低、抗干擾能力強的智能PID控制。
卡爾曼濾波器控制系統智能算法搜尋者優化算法PID控制參數整定噪聲干擾信號
0 引言
在生產過程控制中,PID控制是應用較廣泛的調節控制方法。然而,PID參數自適應整定一直是PID控制中一個至關重要的問題[1]。
隨著智能算法和模糊神經網絡的發展,一些學者對傳統PID控制策略進行了改進和優化。文獻[2]采用Smith模糊PID控制算法,解決了一階線性純滯后問題,加快了系統調節過程。文獻[3]利用人工蜂群算法,對PID控制參數進行自適應整定。謝攀[4]等通過把傳遞函數時滯指數項近似有理化后,再利用全空間搜索法優化極點、頻率和阻尼比等參數,間接得到PID參數,算法較簡單,但對大時滯系統的控制能力較差。劉晴[5]、鄧麗[6]、孫莉[7]等分別采用BP神經網絡、免疫算法和模糊控制算法,通過優化PID參數進行系統控制,但這些方法在一定程度上,仍存在收斂速度慢、易陷入局部極值的缺點。
在生產過程中,系統經常受到非平穩隨機噪聲的影響,因此,本文使用全局尋優能力非常強的搜尋者優化算法(seeker optimization algorithm, SOA)和卡爾曼(Kalman)濾波器相結合的PID控制方法。該方法既實現了PID參數全局自適應優化,又有效抑制了控制噪聲和測量噪聲。
1 卡爾曼濾波器原理
卡爾曼濾波理論是由卡爾曼在1961年提出的[8],其利用狀態空間概念描述系統,以最小均方誤差為準則,通過遞歸算法獲得最優線性估計狀態解。在濾波過程中,卡爾曼濾波器只需要最近兩次濾波數據,所以存儲數據少、效率高、可靠性強,可用于多維平穩和非平穩噪聲濾波處理[9]。卡爾曼濾波器結構如圖1所示。
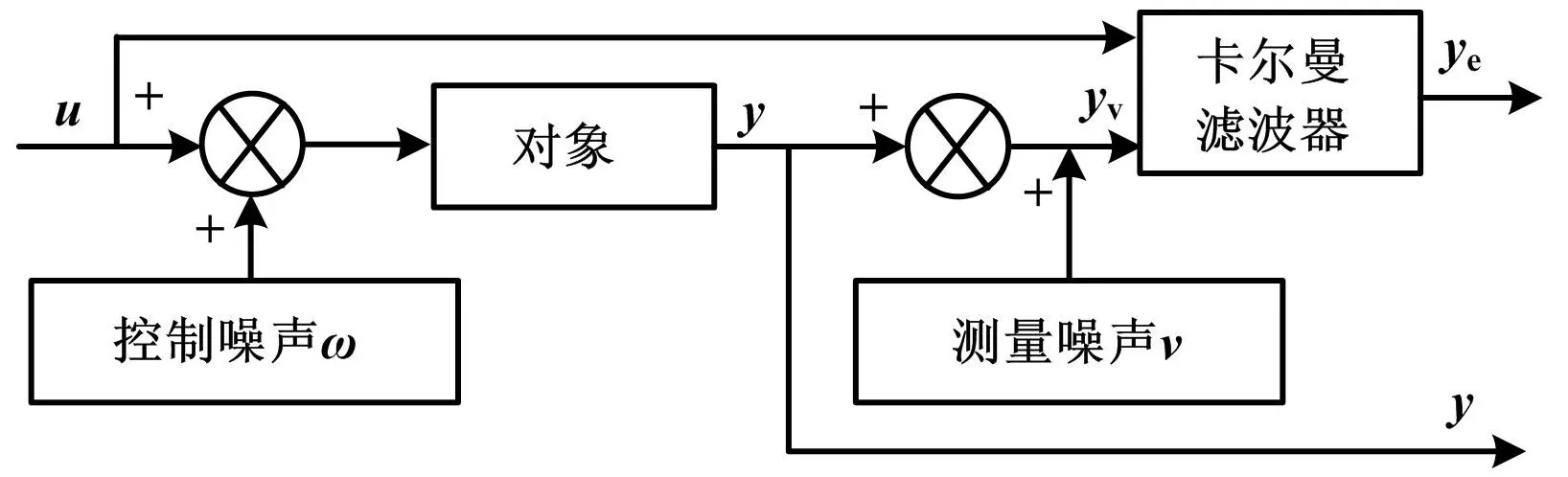
圖1 卡爾曼濾波器結構示意圖
對于離散時域系統,構建卡爾曼濾波器模型,得到的狀態方程和測量方程分別為:
x(k)=Ax(k-1)+B[u(k)+ω(k)]
(1)
yv(k)=Cx(k)+v(k)
(2)
式中:x(k)為系統k時刻的狀態量;A、B為轉移矩陣參數;w(k)為k時刻的控制噪聲;u(k)為k時刻的系統控制量;yv(k)為k時刻的測量值;C為測量矩陣參數;v(k)為k時刻的測量噪聲信號。控制噪聲和測量噪聲是不相關的均值為零的高斯白噪聲。
卡爾曼濾波器根據測量矩陣、轉移矩陣、測量值和測量噪聲協方差等數據,遞推得到當前最優估計值。
離散卡爾曼濾波器的遞推算法公式歸納如下[10]。
①狀態估計協方差:
p(k)=A(k)P(k-1)A(k)T+BQBT
(3)
②濾波器增益:
M(k)=p(k)CT[Cp(k)CT+R]-1
(4)
③均方誤差協方差:
P(k)=[I-M(k)C]p(k)
(5)
④狀態估計值:
x(k)=Ax(k-1)+M(k)[yv(k)-
CAx(k-1)]
(6)
⑤濾波后輸出值:
ye(k)=Cx(k)
(7)
以上公式中:I為單位矩陣;Q為控制噪聲協方差;R為測量噪聲協方差。
2 SOA算法優化PID控制器參數
2.1搜尋者優化算法
搜尋者優化算法(SOA)是一種群體智能搜索算法,由戴朝華等學者提出[11]。SOA算法模擬人類的智能搜索行為,能夠通過有效描述自然語言和不確定性推理的模糊邏輯對搜索規則進行建模。SOA算法以搜尋者位置為個體,搜尋團隊為種群,根據不確定推理確定個體前進的步長,根據經驗梯度確定個體的搜索方向,通過不斷更新個體位置,以獲得問題的最優解。
2.2SOA算法優化PID控制器參數步驟
為了迅速、準確地進行PID控制器參數整定,使系統具有良好的魯棒性和較快的收斂性,本文用搜尋者優化算法對控制器參數進行優化,具體優化步驟如下。
①初始化種群。
設種群有N個搜尋者個體,每個個體的位置矢量由PID控制器的比例、積分和微分三個控制參數組成,所以個體位置矢量的維數D=3。第i維參數的取值范圍可根據實際工程應用背景統一或單獨選取,對應的參數可在取值范圍內隨機選取。初始化種群可以用一個N×D的矩陣表示:
(8)
式中:POP為種群;KN為第N個搜尋者個體;knp、kni和knd分別為第n個搜尋者個體位置矢量中的比例、積分和微分參數。
②選取適應度函數,并計算每個搜尋者個體的適應度值。
在初始解向最優解進化的過程中,SOA算法僅通過適應度值來評價搜尋者個體的優劣。適應度值是個體更新的依據,用于指導個體不斷在全局位置空間搜索,最后進化得到全局最優解。
為了獲得PID控制過程誤差特性,選取適應度函數為:
(9)
式中:e(t)為PID控制系統期望輸出值r(t)與實際輸出y(t)之間的誤差,e(t)=r(t)-y(t);u(t)為PID控制器的輸出;β1和β2為[0,1]之間的權值常數。
(10)
式中:權值β3≥100。
③確定群體中每個搜尋者個體的比例、積分和微分參數的搜索方向及步長。
SOA算法模擬人類的智能搜索行為,利用人類搜索經驗梯度和模糊推理的行為,制定概念明確、易于理解、便于實現的搜索規則,從而確定搜尋者個體的進化方向和步長。
SOA算法的搜索規則可以簡單歸納為:如果適應度值小,則步長短。可以理解為:當適應度值較小時,該搜尋者個體所處位置較優,更優位置可能在較優位置附近,所以應減小步長;當適應度值較大時,該搜尋者個體所處位置較差,則應該在更大范圍內搜索,所以應增大步長。
搜尋者個體的實際搜索方向是綜合多個經驗方向、經加權幾何平均確定的,包括向個體歷史最佳位置前進的利己方向、向鄰域最佳位置前進的利他方向和實時跟蹤搜索效果的預動方向。搜尋者個體的搜索方向和步長的具體函數見文獻[12]。
④更新搜尋者個體中比例、積分和微分的參數值。
搜尋者個體比例、積分和微分參數的更新函數如下:
(11)
式中:αnp(s)、αni(s)和αnd(s)分別為群體進化第s代時,第n個個體的比例P、積分I和微分D的搜索步長,{αnp(s),αni(s),αnd(s)}≥0;dnp(s)、dni(s)和dnd(s)分別為對應參數的搜索方向,且取值只能為-1、0和1,d(s)=1表示更新后的PID參數值增大,d(s)=0表示更新后的PID參數值保持不變,d(s)=-1表示更新后的PID參數值減小。
⑤判斷終止條件。
如果滿足終止條件,則停止搜索,并輸出最佳PID控制器參數;否則,轉至步驟②。
3 基于SOA算法和卡爾曼濾波器的PID控制
為了解決PID控制器參數整定的非智能性,減小傳統PID控制過程中多維非平穩隨機噪聲的影響,提出基于SOA算法和卡爾曼濾波器的PID控制方法。控制系統通過SOA算法優化PID控制器參數,實現了PID控制器參數整定的智能化,并采用卡爾曼濾波器消除控制噪聲和測量噪聲,最終使系統誤差減小、收斂加速、穩定性增強。控制系統結構如圖2所示。
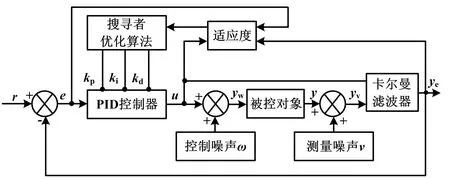
圖2 控制系統結構圖
控制系統按功能可以分為PID控制、噪聲消除和PID控制參數優化三部分。
系統控制的實現過程是:①初始化搜尋種群(多組PID控制器參數),將種群中的個體(一組PID控制器參數)依次賦給PID控制器;對被控對象進行控制,并利用卡爾曼濾波器進行噪聲消除處理,得到系統濾波后輸出信號ye。②利用輸出偏差e、PID控制律u和輸出信號ye,計算得到每個個體的適應度值。③根據適應度值,利用SOA算法進行搜尋種群的更新,然后把更新后的個體繼續代入PID控制器進行控制。④通過不斷循環控制和PID控制參數的更新,直到滿足循環條件(一般為循環次數或系統控制精度),則輸出最優個體。⑤將最優PID控制器參數值代入控制器,并結合卡爾曼濾波器,即可得到控制系統的最佳輸出值。
4 仿真研究
選取二階延遲被控對象,其傳遞函數為:
(12)
設定采樣時間為1ms,對傳遞函數進行離散化,得到狀態方程和測量方程。
①狀態方程:

[u(k)+w(k)]
(13)
②測量方程:
yv(k)=[02.5]x(k)+v(k)
(14)
4.1參數設置
①SOA算法參數設置。
搜尋種群規模為30,個體維數為3,每一維待優化參數kp、ki和kd的初始取值在[0,100]內隨機選取,且在優化過程中,取值范圍均限定為[0,100]。最大進化代數為100,目標函數中參數β1=0.999、β2=0.001、β3=100。參數搜索的步長由高斯隸屬度函數確定[12],隸屬度最大值和最小值分別設定為0.985和0.011,預動方向的慣性權值隨著進化代數由0.9線性減小到0.1,利己方向和利他方向的權值均設定為0.5。
②卡爾曼濾波器參數設置。
4.2結果比較與分析
設系統輸入為單位階躍信號r=1,取一組經驗參數值kP=15、ki=120、kd=0.8,則加入與未加入卡爾曼濾波器的常規PID控制階躍響應比較如圖3所示。
經過SOA算法優化后的PID控制參數為kp=22.873 1、ki=82.186 5、kd=1.598 7。基于SOA-卡爾曼和基于卡爾曼的PID參數單位階躍響應比較如圖4所示。
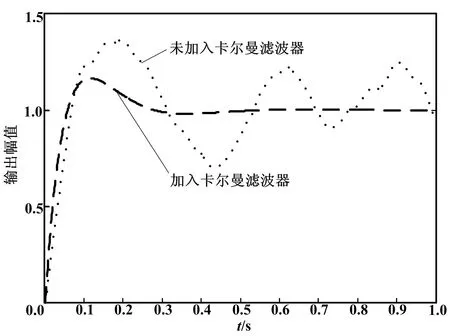
圖3 常規PID控制階躍響應比較圖
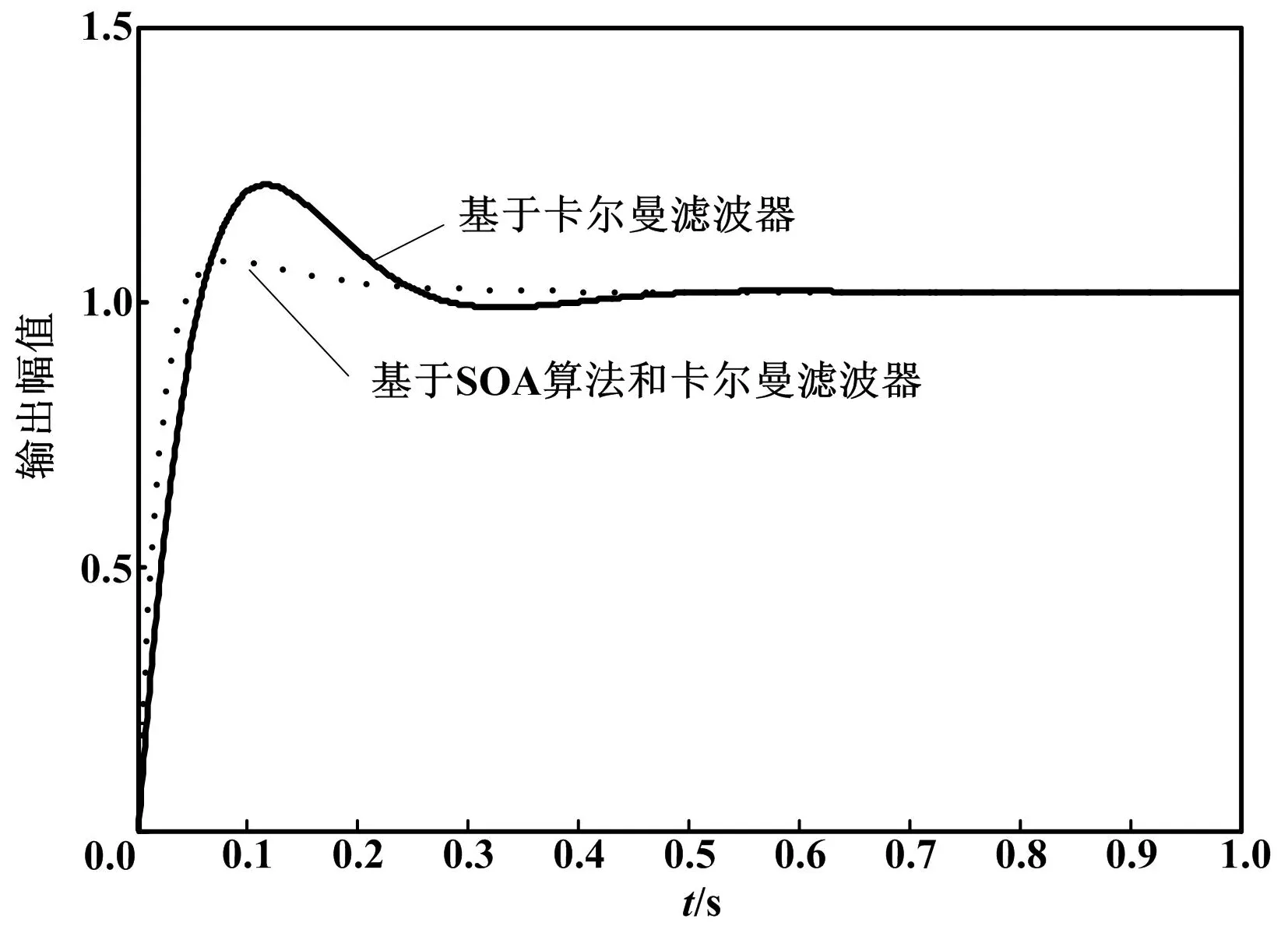
圖4 PID參數單位階躍響應比較圖
根據SOA算法優化后的PID參數值,并結合PID參數在校正環節中的作用,得到更佳的PID控制參數kp=23、kI=60、kd=2.2。校正后的SOA優化參數階躍響應曲線如圖5所示。
圖5 校正后SOA優化參數階躍響應曲線
結果分析如下:
①由圖3可知,加入卡爾曼濾波器的PID控制系統超調量減小、震蕩次數減少,并能迅速達到穩定態,有效降低了白噪聲的影響。
②由圖4可知,結合SOA算法和卡爾曼濾波器的PID控制系統不僅可以抑制對系統性能有較大影響的控制噪聲和測量噪聲,而且系統上升時間和穩態時間加快,超調量和震蕩次數明顯減少,系統的動態性能和靜態性能均得到了提高。
③由圖4和圖5可知,SOA算法不易直接優化得到最佳的PID參數,但優化后的PID參數值為PID系統參數的最佳整定提供了非常有效的參考依據。
5 結束語
針對PID控制系統的控制參數調整困難,以及在控制過程中噪聲對系統性能的影響,提出了基于搜尋者優化算法和卡爾曼濾波器相結合的PID控制方法。結果表明,該控制方法可以得到較優的PID參數,并能有效抑制控制干擾信號和測量噪聲信號,使系統具有更快的調節速度和更好的穩定性,控制性能有較大的改善。
[1] 張世峰,李鵬.基于神經網絡的自整定PID控制器設計[J].自動化儀表,2009,30(7):64-66.
[2] 王曉娜,左曉菲,張輝,等.Smith模糊PID勻速升溫控制策略研究[J].自動化儀表,2015,36(1):87-90.
[3] 蔡超,周武能.人工蜂群算法整定PID控制器參數[J].自動化儀表,2015,36(8):74-77.
[4] 謝攀,譚功全,張昌華.一種簡單的低階時滯過程PID參數優化方法[J].自動化儀表,2013,34(6):12-19.
[5] 劉晴,張正剛,丁維明.神經網絡預測PID控制在氣化爐中的應用[J].自動化儀表,2014,35(5):60-62.
[6] 鄧麗,蔣婧,費敏銳.基于免疫粒子群算法的PID參數整定與自適應[J].自動化儀表,2013,34(2):65-67.
[7] 孫莉,趙志光.模糊PID控制器在水泥回轉窯的應用[J].自動化儀表,2014,35(1):26-29.
[8] DAS S,PAN I,HALDER K,et al.LQR based improved discrete PID controller design via optimum selection of weighting matrices using fractional order integral performance index[J].Applied Mathematical Modelling,2013,37(6):4253-4268.
[9] SIMON D.Kalman filtering with state constraints: a survey of linear and nonlinear algorithms[J].Control Theory & Applications,IET,2010,4(8): 1303-1318.
[10]鄢華林,齊圣民.卡爾曼濾波抗積分飽和PDF控制系統研究[J].自動化儀表,2015,36(2):5-7.
[11]DAI C H,ZHU Y F,CHEN W.Seeker optimization algorithm[C]//International Conference on Computational Intelligence and Security.IEEE,2006:167-176.
[12]戴朝華.搜尋者優化算法及其應用研究[D].成都:西南交通大學,2009.
PID Control Combining Seeker Optimization Algorithm and Kalman Filter
Parameter tuning of traditional PID controller depends on experience,and in control process,the system is easily affected by a variety of noises,in order to settle these problems,the PID control method based on combination of seeker optimization algorithm and Kalman filter is proposed.The seeker optimization algorithm is used to optimize PID parameters intelligently,and Kalman filter is used to effectively suppress the control noise and measurement noise.A second order system with delay is simulated,and the results show that compared with the traditional PID control method,this method can achieve intelligent PID control to get better PID parameters and effectively eliminate noise interference in the process of control,to implement intelligent PID control which is featured with good performance in quick regulation speed,low steady-state error and strong anti-interference capability.
Kalman filterControl systemIntelligence algorithmSeeker optimization algorithmPID controlParameter tuningNoiseInterference signal
TH-39;TP273+.2
A
10.16086/j.cnki.issn 1000-0380.201609005
修改稿收到日期:2016-01-05。
作者劉俊(1986—),男,2013年畢業于太原科技大學控制工程專業,獲碩士學位,講師;主要從事人工神經網絡、優化算法和智能控制方向的研究。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
電源技術(2016年9期)2016-02-27 09:05:39