臍帶纜在潛器下放過程中的運動建模與仿真
2016-10-12 05:07:49李霄霄顧解忡
海洋工程 2016年2期
李霄霄,馬 寧,劉 晗,顧解忡
(1.上海交通大學 海洋工程國家重點實驗室,上海 200240; 2.高新船舶與深海開發裝備協同創新中心,上海 200240)
臍帶纜在潛器下放過程中的運動建模與仿真
李霄霄1,2,馬 寧1,2,劉 晗1,2,顧解忡1,2
(1.上海交通大學 海洋工程國家重點實驗室,上海 200240; 2.高新船舶與深海開發裝備協同創新中心,上海 200240)
潛器在下放布置過程中需要考慮變長度的臍帶纜對其運動的影響,在考慮流的情況下,對臍帶纜的有限差分模型進行了改進,并采用最小二乘方法求解由時間和空間上的中心差分格式離散后的非線性方程組。為了驗證模型改進的有效性,將潛器在均勻定常流中水平勻速直航時的數值解與該特殊情況下的解析解進行比較,兩組解的吻合不僅證實了模型改進的有效性,而且表明上述數值計算方法是可靠且有效的。在潛器下放布置運動給定的情況下,臍帶纜的運動仿真結果表明,潛器姿態角的調整會對拖曳點處的纜繩張力大小和變化趨勢產生顯著的影響,流在改變纜繩空間形狀的同時引起了纜繩對潛器作用力和力矩的非線性和時變性,臍帶纜總是阻止潛器自身動力對運動速度和姿態角的改變,且對縱蕩運動的影響最大。
水下潛器;變長度臍帶纜;有限差分法;最小二乘法;均勻定常流
Abstract:With consideration of current,the finite difference model for umbilical cable is improved to evaluate the effects of variable-length cable on underwater vehicle’s motion during its deployment.The least square method is adopted to solve the nonlinear equations discretized with central-difference scheme over time and space.The validity of the improved model is verified by comparing the numerical solution with the analytical one when the underwater vehicle is horizontally moving forward with a constant velocity in uniform steady flow.The agreement between numerical solutions and analytical ones not only confirms the validity of the improved model but also proves the reliability and validity of the numerical scheme.For the condition that the deployment motion of the underwater vehicle is given,the simulation results of the umbilical cable motion indicate that the adjustment of the underwater vehicle’s attitude angle can significantly affect the value and variation tendency of cable tension at tow-point.The existence of current causes the nonlinearity and time-dependency of force and moment acting on the underwater vehicle while changing the configurations of cable.Moreover,the umbilical cable always hinders the change of the underwater vehicle’s velocity and attitude angle powered by itself,and surge motion is most affected by the cable.
Keywords:underwater vehicles; length-variable umbilical cable; finite difference method; least square method; uniform steady flow
隨著海洋工程的不斷發展,帶纜水下潛器的應用越來越多,也越來越受到研究者的重視,特別是拖曳系統動力學問題成為研究的熱點。目前,關于拖纜的動力學問題主要采用有限差分法[1-2]和集中質量法[3-4]來求解。早些年的研究主要集中于定長度的拖纜[5-6],對于變長度纜的研究較少。近些年,關于變長度纜問題的研究越來越多,Feng Z[7]采用有限差分法計算了信息纜對水下航行器運動的影響,盧軍[8]采用有限差分法對水下拖曳系統的收放安全性進行了模擬計算;王飛、徐剛[9-10]等采用集中質量法對收放纜速度為已知函數的拖纜收放問題進行了研究,但計算結果有些擾動,楊智棟[11]等采用集中質量法對變長度拖纜AUV的縱向運動進行了建模與仿真。
本文基于有限差分模型,對考慮流作用下的現有數學模型進行了一定的改進,并采用最小二乘法求解離散后的非線性方程組。為了驗證模型改進與最小二乘方法的有效性,將潛器在均勻定常流中勻速水平直航這一特殊情況的數值結果與解析解進行了對比,使這種有效性得到了驗證。文中還對潛器下放布置過程中的下潛與轉動運動進行了仿真計算,并給出了臍帶纜的空間形狀變化及其對潛器運動的影響。
1 變長度纜的運動建模
整個系統如圖1所示,由水面母船、傳輸信號的臍帶纜和水下潛器ARV組成。考慮到水面母船的質量相對于臍帶纜和水下潛器大很多,可以認為臍帶纜傳遞給水面母船的張力不會使母船產生相應的運動,因此整個系統的運動就集中于臍帶纜和水下潛器上。下面給出變長度臍帶纜的運動建模過程。
1.1坐標系的建立及坐標變換關系
在圖1中,建立三個坐標系:船體固定的整體坐標系i-j-k、臍帶纜局部坐標系t-n-b和潛器局部坐標系iv-jv-kv。
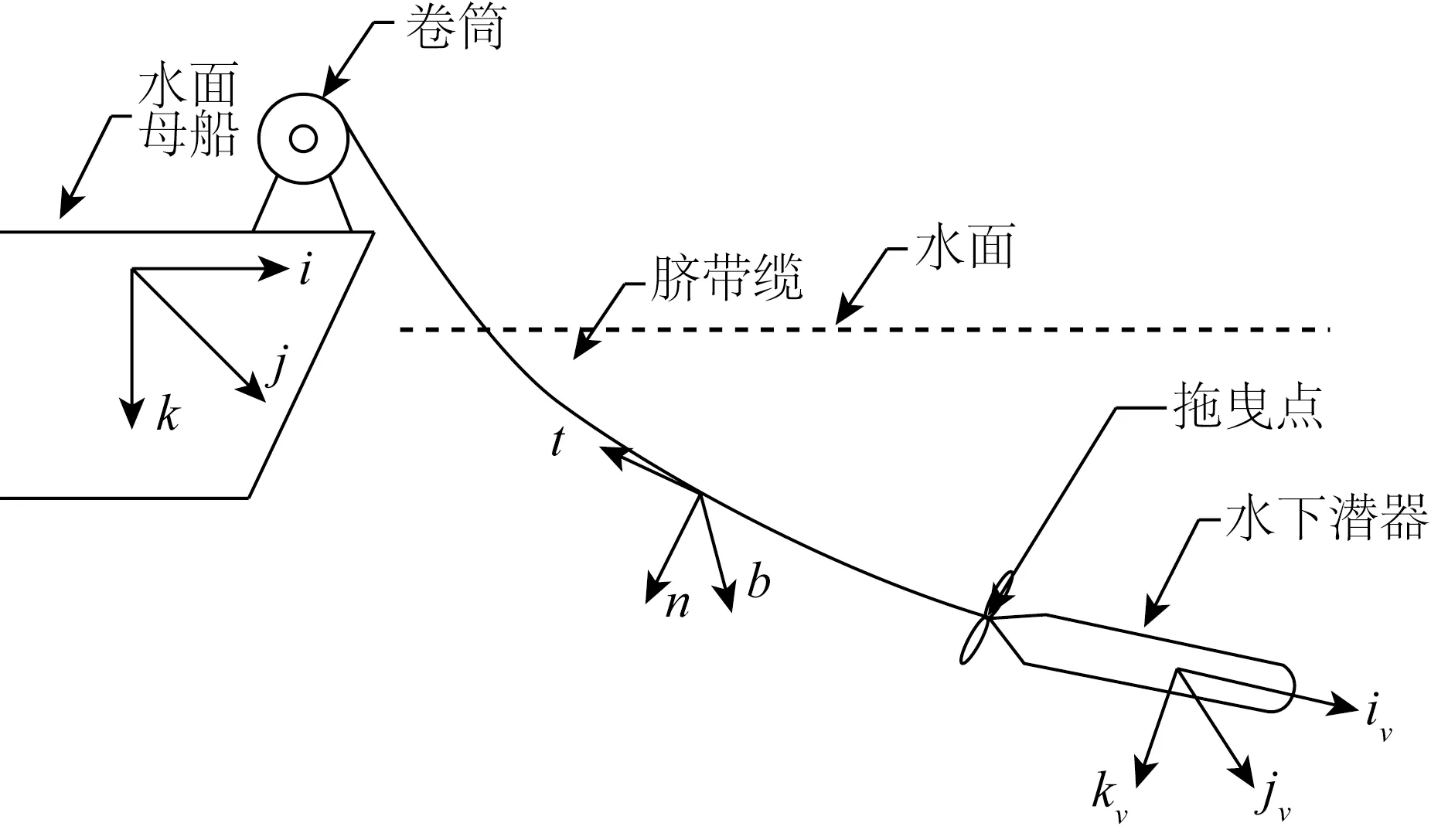
圖1 坐標系示意Fig.1 Coordinate system
潛器局部坐標系與整體坐標系之間的變換關系為[12]:
臍帶纜局部坐標系與整體坐標系之間的變換關系為[2]:
根據式(1)~(3),可以得到纜繩局部坐標系與潛器局部坐標系之間的變換關系:
1.2臍帶纜的動力平衡方程式
假定臍帶纜是具有圓形橫截面的細長柔性柱體。臍帶纜在水中運動時,要受到重力、浮力、流體阻力、慣性力以及水面母船和水下潛器的拉力作用,取單位微元的臍帶纜進行受力分析,可以得到臍帶纜的動力平衡方程式:

同時考慮到臍帶纜在運動過程中,纜形變化是連續光滑的,則有纜的連續性方程:
式(6)中右邊部分的上角標表示對未拉伸狀態時纜繩長度s的偏導數。
聯立矢量方程(5)、(6),并設未知矢量Y=[T,Vt,Vn,Vb,α,β]T,通過推導化簡,可以將上述矢量方程組寫成如下的矩陣形式:
式中:e=1/EA,m1=m0+ρA0,wc=(m0-ρA0)g,N1=-ρA0(Jxcosα-Jysinα),N2=-ρA0(Jxsinαsinβ+Jycosαsinβ),N3=-ρA0(-Jxcosαcosβ+Jysinαcosβ+Jzsinβ) 。
1.3邊界條件
在整個系統中,臍帶纜的邊界條件由兩部分組成,一部分是臍帶纜首端邊界條件,即在纜繩與水下潛器的連接點處的速度應保持連續性:
式中:Vc=[u,v,w]、Ωc=[p,q,r]、rc=[xc,yc,zc]分別為潛器局部坐標系下潛器的線速度、角速度和連接點處的位置坐標。
另一部分是臍帶纜尾端邊界條件,纜繩在該處與水面母船上的纜繩卷筒相連接,此時纜繩僅有切向速度,而無法向速度,同時考慮到卷筒角動量隨時間的變化,可以得到如下的邊界方程[7]:
式中:Rd、Id為卷筒的半徑、轉動慣量,Γf為轉軸處的阻尼力矩。
1.4臍帶纜對潛器的作用力與作用力矩
由拖曳點處的纜繩張力T(0,t),經過坐標變換可以得到在潛器局部坐標系下,纜繩作用于水下潛器上的作用力和作用力矩:
2 數值計算方法
鑒于臍帶纜的控制方程是一個復雜的偏微分方程,為此采用空間和時間的中心差分方法將方程離散,并采用最小二乘法求解離散后的非線性方程組。
2.1控制方程的離散——有限差分法

同時定義如下的離散形式[7]:
在式(15)中,由于新微段ΔSk+1在tk時未浸沒于水中,需要根據卷筒的轉動對tk時的未知矢量Y(Sk+1,tk)進行假定,這里假定Y(Sk+1,tk)=[T(Sk,tk),Vt(Sk,tk),0,0,α(Sk,tk),β(Sk,tk)],與文獻[7]的假定略有不同,且數值計算結果表明這種假定是合理的。
在節點(Sj-1/2,tk+1/2),j=1,2,...,k+1離散控制方程(7),可以得到如下6(k+1)個差分方程[2]:
邊界方程(8)~(11)的離散形式如下:
2.2數值求解流程
式(16)~式(20)構成一個含有6(k+2)個非線性方程的方程組,且隨著時間t的變化,非線性方程個數和未知數個數都發生相應的變化。上述非線性方程組的求解采用最小二乘法,數值求解流程如下:
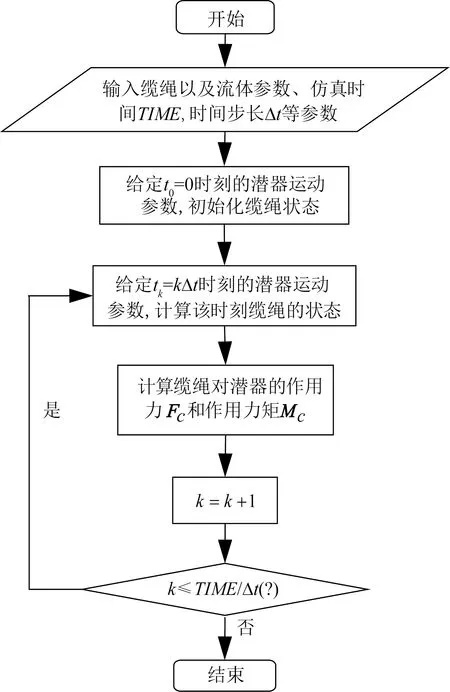
圖2 數值求解流程Fig.2 Flow chart of numerical computation
3 仿真結果與分析
臍帶纜為細長的輕纜,且所受浮力大小等于重力,其連接于水下潛器的位置坐標為rc=[-0.6,0,0];卷筒的半徑為0.1 m,且忽略轉軸處的阻尼力矩Γf,纜繩和流體參數[7]如下:

表1 纜繩和流體參數Tab.1 Cable and fluid parameters
3.1水平勻速直航
由于臍帶纜為中性浮力的輕纜,在水下潛器水平勻速直航,且水流速度J與潛器運動方向平行的情況下,纜繩在每一節點處的歐拉角α、β以及速度Vt、Vn、Vb均不隨時間t和纜繩長度s的變化,控制方程(7)可化簡為:
由邊界方程(9)可求得上式的解析解如下:
由式(14),可進一步得到纜繩在潛器拖曳點處的張力(纜繩對潛器的拖曳阻力):
取時間步長Δt=1 s,仿真時間TIME=50 s,水下潛器的運動參數為:u=2 m/s,v=w=0,p=q=r=0,φ=θ=ψ=0;根據文獻[13]中關于南海北部海流的觀測結果,水流速度分別取為:Jx=Jy=Jz=0、Jx=-0.1 m/s,Jy=Jz=0和Jx=-0.2 m/s,Jy=Jz=0。在不同流速下,拖曳點處纜繩張力的數值計算結果和解析解如圖3所示。
由圖3可以看出,隨著時間的增加,纜繩長度不斷增加,拖曳點處纜繩張力也以近乎線性的方式增加,出現這樣現象的主要原因是水對纜繩的阻力隨著纜繩長度增加而不斷增加;比較不同流速時拖曳點處的纜繩張力,可以發現流對張力的影響明顯,且這種影響隨著時間增加而不斷增大;比較各流速時數值計算結果和解析解,可以看出數值結果與解析解吻合良好,這也間接證明了模型改進以及最小二乘方法求解非線性方程組的有效性。
3.2定角速度下潛與轉動

圖4分別給出了潛器在該運動過程中縱傾角θ與首向角ψ隨時間的變化規律。
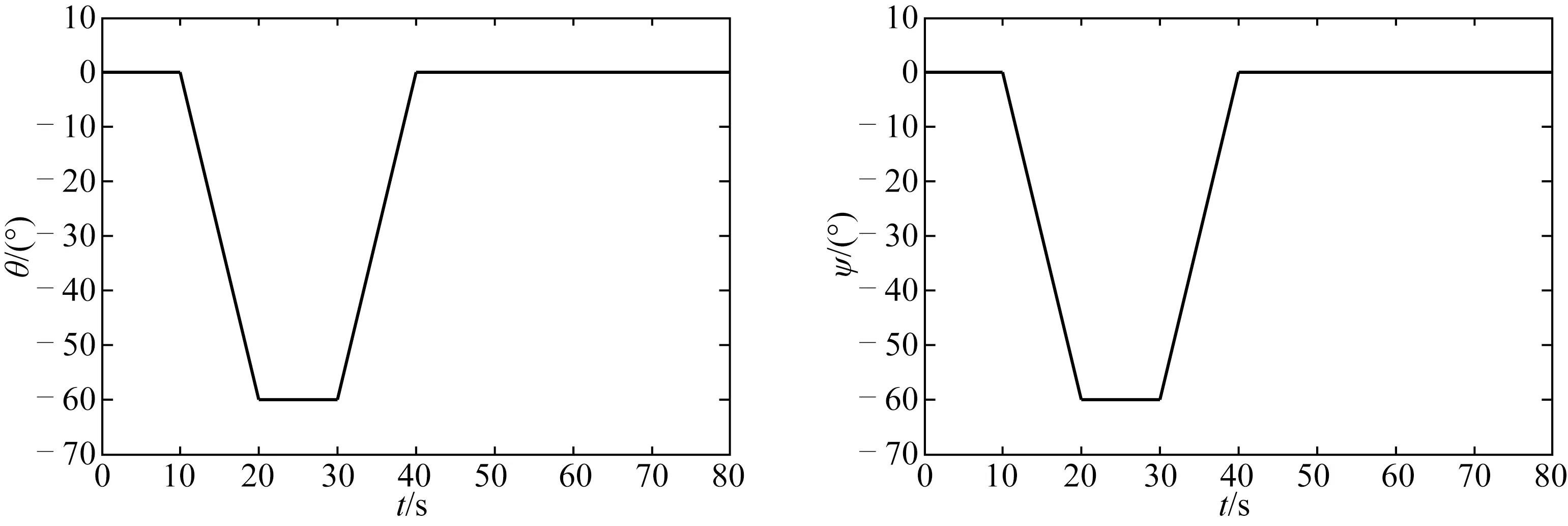
圖4 潛器在不同時刻的縱傾角和首向角Fig.4 Pitch angles and heading angles at different time
圖5分別給出了臍帶纜在0~40 s、40~80 s兩段時間內空間形狀的變化,左側圖表明潛器正在逐漸下潛,右側圖表明潛器正逐漸轉向,且由左側圖可以看出Jy=0.1 m/s的流使臍帶纜沿y的正向有明顯的偏移,且計算結果表明最大偏移位置約為y=3 m。
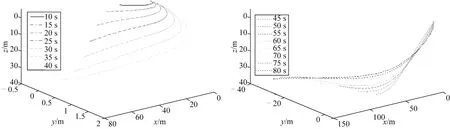
圖5 不同時刻的纜形變化Fig.5 Configurations of cable at different time
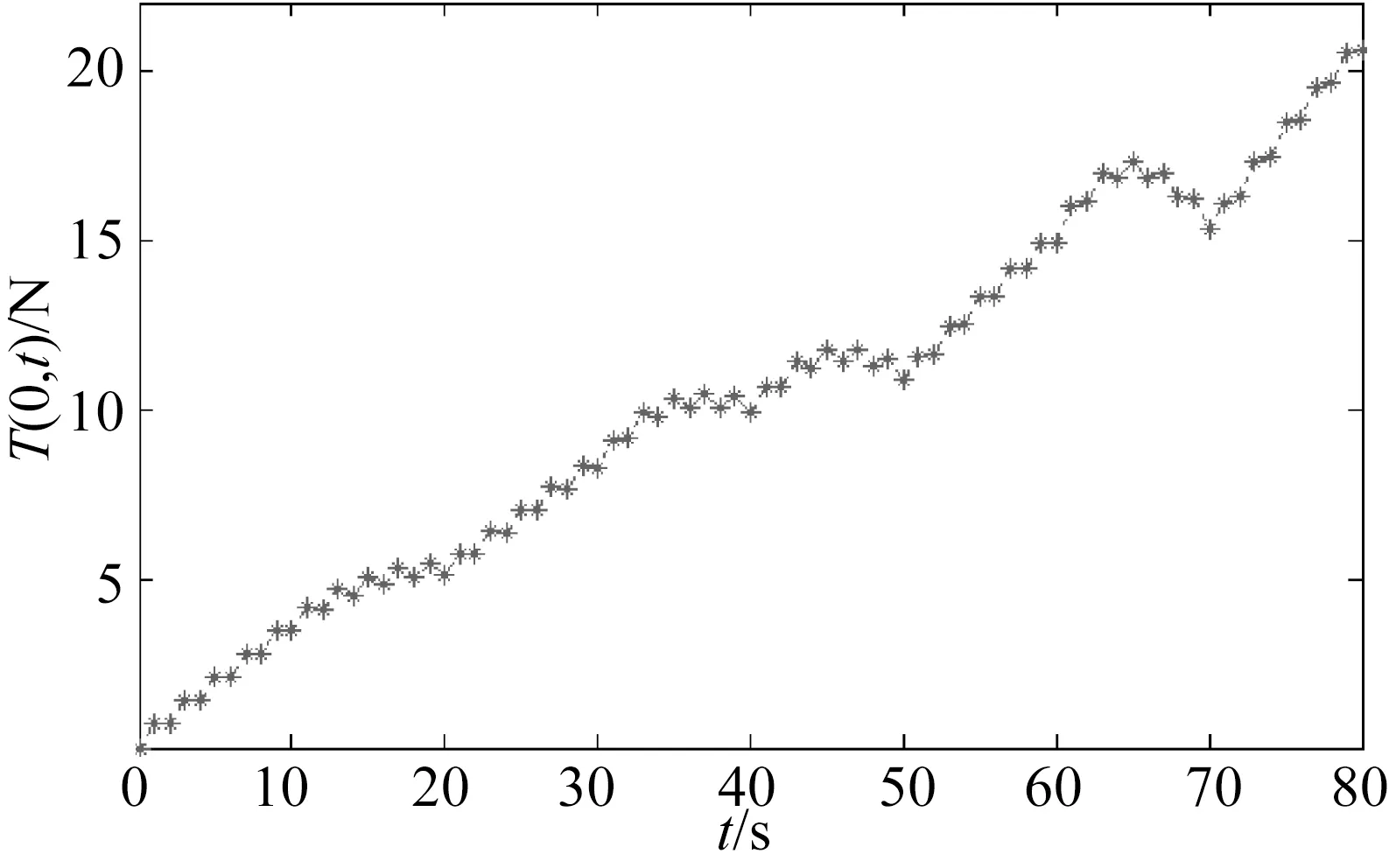
圖6 拖曳點處纜繩張力隨時間的變化Fig.6 Variation of cable tension at tow-point with time
圖6表明拖曳點處臍帶纜的張力T(0,t)總體上是隨時間不斷增大的,僅在30~40 s,40~50 s,60~70 s三個時間段內出現小幅的先增后減的趨勢,其余時間段內基本上呈線性增大的趨勢,出現上述情況的主要原因是潛器在這三個時間段內由縱傾角θ=-60°調整為無縱傾,首向角ψ=-60°調整為無首向角,使得拖曳點處的速度Vn、Vb出現方向更替,導致臍帶纜與潛器之間的作用力呈現微幅的先增后減趨勢。
圖7給出了拖曳點處臍帶纜在纜繩局部坐標系下三個方向的運動速度,從圖中可以看出切向速度Vt出現微幅的波動,但基本保持在-2 m/s左右,速度Vn隨著縱傾角θ的變化而發生從0 m/s到0.5 m/s到-0.5 m/s再到0 m/s的變化,速度Vb隨著首向角ψ的變化也發生與Vn類似的變化。

圖7 拖曳點處纜繩速度隨時間的變化Fig.7 Variation of cable velocities at tow-point with time
圖8分別給出了在潛器局部坐標系下臍帶纜對潛器的作用力Fc和作用力矩Mc,由左側圖可以看出Fcx的大小一直在增加,表明若推進器的功率保持不變,則潛器的前進速度將不斷減小,Fcy,Fcz分別隨首向角ψ和縱傾角θ的變化在正向、負向和零之間變化,從而產生橫向加速度和垂向加速度來改變潛器的運動狀態;由右側圖可以看到Mcx始終保持零值,從而保證潛器不會發生橫搖,而這一結果也與實際情況相吻合,Mcy,Mcz分別隨縱傾角θ和首向角ψ的變化也在正向、負向和零之間變化,從而使潛器不斷調整縱傾角θ和首向角ψ,來達到預設的潛器姿態角。
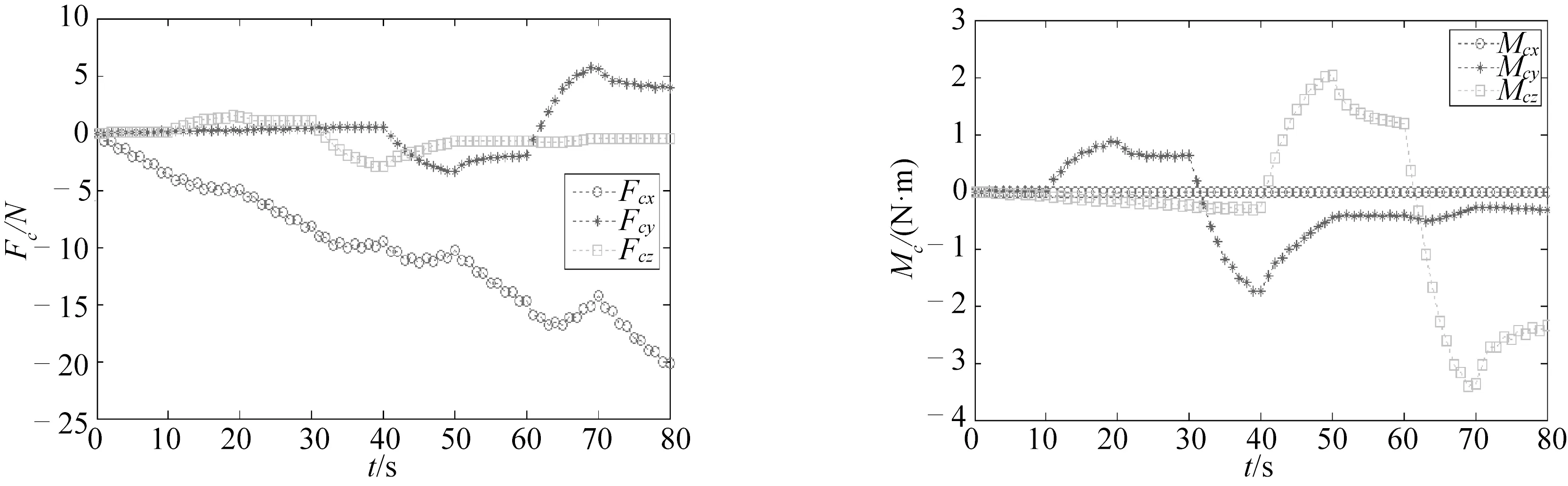
圖8 纜繩在不同時刻對潛器的作用力和作用力矩Fig.8 Force and moment acting on underwater vehicle by cable at different time
4 結 語
在考慮定常均勻流的情況下,通過臍帶纜的運動建模對原有的有限差分模型進行了改進,并進行了潛器在下放布置過程中的臍帶纜運動數值模擬,在潛器運動過程給定的情況下得到如下結論:
1)雖然拖曳點處的纜繩張力總體上隨著纜繩浸水部分的增加呈線性增大的趨勢,但潛器調整姿態角的過渡運動時間段內纜繩張力呈緩慢的先增后減趨勢,因此潛器姿態角的調整對拖曳點處纜繩張力變化趨勢所產生的影響不可忽略。
2)流速的增加不僅使拖曳點處的纜繩張力增大,而且流的存在會改變纜繩的空間形狀,特別是會使纜繩發生顯著的橫向位置偏移;流的存在增強了纜繩作用于潛器的力和力矩的非線性和時變性,給潛器的操縱帶來更大的困難,因此在潛器下放布置時,應選擇流對纜繩運動影響最小的路徑下放潛器。
3)臍帶纜作用于潛器的力和力矩總是阻止潛器自身動力對運動速度和姿態角的改變,且對縱蕩運動的影響比其他運動的影響更大,需要在潛器的設計和運動控制中對該類運動給予最大的關注。
[1] ABLOW C M,SCHECHTER S.Numerical simulation of undersea cable dynamics [J].Ocean Engineering,1983,10 (6):443-457.
[2] MILINAZZO F,WILKIE M,LATCHMAN S A.An efficient algorithm for simulating the dynamics of towed cable systems [J].Ocean Engineering,1987,14 (6):513-526.
[3] WALTON T S,POLACHECH H.Calculation of transient motion of submerged cables [J].Mathematics of Computation,1960,14:27-46.
[4] HUANG S.Dynamic analysis of three-dimensional marine cables [J].Ocean Engineering,1994,21 (6):587-605.
[5] WU Jiaming.Simulation of a two-part underwater towed system [D].Pokfulam,Hong Kong:The University of Hong Kong,1998.
[6] 李英輝,李喜斌,戴杰,等.拖曳系統計算中拖纜與拖體的耦合計算[J].海洋工程,2002,20(4):37-42.(LI Yinghui,LI Xibin,DAI Jie,et al.Calculation of coupling between the cable and the towed-body in the towed system [J].The Ocean Engineering,2002,20(4):37-42.(in Chinese))
[7] FENG Z,ALLEN R.Evaluation of the effects of the communication cable on the dynamics of an underwater flight vehicle [J].Ocean Engineering,2004,31(8-9):1019-1035.
[8] 盧軍,黃國樑.水下拖曳系統收放安全性的模擬計算[J].上海交通大學學報,2005(5):691-694+700.(LU Jun,HUANG Guoliang.Numerical calculation of the security of deploying and retracting underwater towed system [J].Journal of Shanghai Jiaotong University,2005(5):691-694+700.(in Chinese))
[9] 王飛.海洋勘探拖曳系統運動仿真與控制技術研究[D].上海:上海交通大學,2007.(WANG Fei.Simulation and control research of marine towed seismic system [D].Shanghai:Shanghai Jiaotong University,2007.(in Chinese))
[10] 徐剛,葛彤,朱繼懋,等.“海龍-3500”深海潛水器的變長纜運動建模與仿真[J].造船技術,2005(5):26-30+25.(XU Gang,GE Tong,ZHU Jimao,et al.Motion modeling and simulation of "Sea-Dragon 3500" ROV with variable length cables[J].Marine Technology,2005(5):26-30+25.(in Chinese))
[11] 楊智棟,潘光,杜曉旭.變纜長拖纜AUV縱向運動建模與仿真[J].魚雷技術,2014(1):14-19.(YANG Zhidong,PAN Guang,DU Xiaoxu.Longitudinal motion modeling and simulation of tethered AUV with length-variable towing cable [J].Torpedo Technology,2014(1):14-19.(in Chinese))
[12] FOSSEN T I.Guidance and control of ocean vehicles [M].Chichester:John Wiley & Sons,1994:9-12.
[13] 楊慶軒,梁鑫峰,田紀偉,等.南海北部海流觀測結果及其譜分析[J].海洋與湖沼,2008(6):561-566.(YANG Qingxuan,LIANG Xinfeng,TIAN Jiwei,et al.Observation of the current in the Northern South China Sea and spectrum analysis [J].Oceanologia Et Limnologia Sinica,2008(6):561-566.(in Chinese))
Motion modeling and simulation of umbilical cable during underwater vehicle’s deployment
LI Xiaoxiao1,2,MA Ning1,2,LIU Han1,2,GU Xiechong1,2
(1.State Key Laboratory of Ocean Engineering,Shanghai Jiao Tong University,Shanghai 200240,China; 2.Collaborative Innovation Center for Advanced Ship and Deep-Sea Exploration (CISSE),Shanghai,200240,China)
P75.1
A
10.16483/j.issn.1005-9865.2016.02.007
1005-9865(2016)02-0047-09
2015-01-19
國家重點基礎研究發展計劃(973計劃)資助項目(2014CB046806-003)
李霄霄(1989-),男,山東棗莊人,碩士研究生,主要從事海洋工程水動力性能研究。E-mail:cangqiong@mail.sjtu.edu.cn
