基于不同考核層次的魚雷反水聲對抗試驗方法
2016-10-13 02:45:48齊立新吳建嵐
水下無人系統學報 2016年3期
齊立新,吳建嵐
(中國人民解放軍91388部隊,廣東 湛江,524022)
基于不同考核層次的魚雷反水聲對抗試驗方法
齊立新,吳建嵐
(中國人民解放軍91388部隊,廣東 湛江,524022)
針對魚雷反水聲對抗戰技指標和功能考核以及反水聲對抗作戰能力評估2個不同的考核層次需求,提出了在規定條件下通過實航試驗驗證魚雷反水聲對抗戰技指標和功能,在戰術背景下以全武器系統使用為前提通過實航試驗和仿真試驗相結合的手段進行魚雷反水聲對抗作戰能力評估的試驗方法,并在2種試驗方法中明確了試驗保障條件需求、試驗實施流程和試驗結果評估標準或方法。該試驗設計思想可直接服務于面向戰技指標和作戰能力雙重考核評估目的下的魚雷定型試驗工程實踐,所提出的方法科學合理,試驗方案經濟可行,可為未來魚雷反水聲對抗試驗鑒定工作提供有益參考。
魚雷;戰技指標和功能;作戰能力;反水聲對抗
0 引言
隨著魚雷技術的飛速發展,其智能化程度越來越高,殺傷力越來越大,航程越來越遠,目標艦艇面臨的威脅隨之加重[1]。為了有效防御魚雷攻擊,目標艦艇通過戰術機動、發射投放各種水聲對抗裝備等措施,擺脫來襲魚雷的探測、跟蹤和攻擊,提高自身的生存概率,無形中促進了水聲對抗技術的發展。現代魚雷反潛作戰,是對魚雷在復雜海洋水聲環境下、對抗條件下作戰能力的極大考驗。因此,在魚雷研制過程中,需考慮對多種水聲對抗器材的目標識別、反水聲對抗功能和魚雷反對抗能力的設計。
為促進新型魚雷盡快裝備部隊形成戰斗力,魚雷試驗不能限于戰技指標和功能性的考核,對抗條件下的反水聲對抗能力試驗與評估的地位和重要性顯得越來越重要[2]。如何在試驗過程中,既考核魚雷反水聲對抗戰技指標和功能,又就對抗條件下魚雷的反水聲對抗作戰能力進行有效評估,是試驗設計中面臨的新課題。文中將魚雷反水聲對抗試驗劃分為反水聲對抗戰技指標和功能考核、反對抗作戰能力試驗與評估2個考核層次,以輕型智能反潛魚雷為例,分別依據不同試驗考核層次下對應的試驗目的進行試驗方案設計和試驗結果評估標準制定,為魚雷反水聲對抗試驗理論研究拓展思路,為魚雷試驗工程實施提供指導和參考。
1 魚雷反水聲對抗戰技指標和功能考核
魚雷的反水聲對抗措施主要通過自導系統來實現,魚雷自導系統能夠對抗目標潛艇施放的人工干擾器材,如氣幕彈、寬帶噪聲干擾器、掃頻干擾器、自航式聲誘餌和固定式聲誘餌的干擾[3]。
輕型智能反潛魚雷具備在一定距離識別氣幕彈、寬帶噪聲干擾器和誘餌為假目標的能力,并且能夠通過反水聲對抗彈道來規避或者穿過水聲對抗器材的彈道或所在位置,最終探測捕獲到真實目標潛艇。
1.1試驗考核目的
考核輕型智能反潛魚雷對氣幕彈、寬帶噪聲干擾器、掃頻干擾器、自航式聲誘餌和固定式聲誘餌的識別功能、識別距離和對抗功能。
1.2試驗實施方案和基本要求
1.2.1試驗項目設置
不同的水聲對抗器材可以單獨也可組合使用以對抗魚雷。單獨使用對抗器材的優點是試驗結果評估簡單,直接規避了在對抗器材聯合使用時因對抗器材相互之間聲干擾造成試驗無效的風險,且能夠分別回答魚雷針對某個干擾器材是否具有識別與反對抗功能,但直接造成試驗經濟成本過高,試驗實施周期延長。
在此,盡量優化試驗方案設計,聯合使用水聲對抗器材,具體試驗項目如下。
1) 魚雷對抗氣幕彈+寬帶噪聲干擾器+自航式聲誘餌攻擊潛艇試驗。
2) 魚雷對抗氣幕彈+掃頻干擾器+固定式聲誘餌攻擊潛艇試驗。
試驗項目中,主要綜合考慮魚雷航程、試驗海區深度、干擾器材的發射/投放時機、目標潛艇機動時機、水下目標(目標潛艇、魚雷和對抗器材)位置信息的測量等試驗要素。
1.2.2試驗兵力及裝備需求
1) 試驗兵力
試驗兵力需求主要包括魚雷發射平臺、目標潛艇或水聲對抗器材布放工作母船。
魚雷發射平臺由水面作戰艦艇擔任,一般為配備魚雷反潛武器系統的驅護艦1艘。
目標潛艇為某型潛艇 1艘,可發射多種水聲對抗器材,配備合作聲信標,可配合水下彈道測量設備完成其航跡測量。
水聲對抗器材布放工作母船1~2艘,若所選潛艇未配備魚雷研制任務書規定的能夠對抗的多種水聲對抗器材,為提高試驗效率,降低試驗安全風險,在試驗中采用潛艇試驗的同時,可選擇水聲對抗器材布放工作母船協助完成對抗器材的布放工作。
2) 被試魚雷
被試魚雷為全航程輕型智能反潛魚雷,一是便于滿足在一個航路中發射布放多種對抗器材,二是給魚雷提供充分的識別對抗工作時間。被試魚雷裝備合作聲信標,可配合水下彈道測量設備完成魚雷航跡的測量。
3) 水聲對抗器材
水聲對抗器材包括氣幕彈、寬帶噪聲干擾器、掃頻干擾器、自航式聲誘餌和固定式聲誘餌。除氣幕彈外,其余水聲對抗器材均配備合作聲信標或其他示位設備,可配合水下彈道測量設備完成水聲對抗器材的位置或航跡信息測量。
1.2.3試驗測控需求
1) 水下彈道測量設備
為便于進行對抗試驗試后處理和結果評判,同時為避免單獨依靠魚雷內記數據一旦在試驗出現故障或意外時無法進行結果評判或故障定位,要求試驗全過程各水下兵力和裝備全工作過程可測量,在試驗時,將目標潛艇、魚雷和水聲對抗器材的航跡及定點位置(如固定式聲誘餌)信息利用測量設備進行全程測量。
2) 時統系統
為便于試后數據處理和結果評估,要求水面、水下各參試兵力及裝備采用同一時間標準,在試驗前利用時統系統進行統一授時。
1.2.4試驗海區及水文條件選擇
自冷戰以來,從全世界魚雷反潛作戰發展趨勢來看,包含美國在內的西方發達國家,不再將深海條件下的反潛作戰方式作為關注的焦點,淺海條件下反潛作戰能力的發展已經成為全世界海軍面臨的共同難題,目前輕型智能反潛魚雷的技術瓶頸就是淺海強混響和強噪聲干擾下的自導檢測問題[4-5],因此,在魚雷反水聲對抗試驗時,必須將試驗海區深度及水文條件作為試驗設計的關鍵因素進行考慮。
在此試驗中,要求淺海條件和深海條件下均進行一定條次的反水聲對抗試驗,由于我國周邊近海幾乎全為淺海,因此,淺海條件下反水聲對抗試驗條次數的比重要相對深海條件下的反水聲對抗試驗比重加大。
淺海靠近海岸,水文條件常年基本屬惡劣狀態,加之受近岸航行的艦船及海洋自噪聲、界面混響和體積混響的影響,未來海軍反潛作戰在淺海基本是惡劣水文條件[6],因此,反水聲對抗試驗要加大淺海惡劣水文條件下的考核力度,同時兼顧中等水文條件和良好水文條件。
1.2.5試驗實施過程
由于是反水聲對抗戰技指標和功能考核,在試驗時盡量要求在標準條件下,按照以下 2條原則進行試驗。
1) 要求魚雷與每種對抗器材均有聲接觸的機會,且各種水聲對抗器材之間不能相互產生聲干擾,尤其是聲誘餌不能接收到噪聲干擾器的噪聲干擾信號后對其進行應答。
2) 魚雷在丟失真實潛艇目標信號后,目標潛艇的機動能夠保證魚雷再搜索過程中還有搜索到目標潛艇的機會,這是與魚雷反水聲對抗功能試驗及反水聲對抗能力試驗最大的區別。
“魚雷對抗氣幕彈+寬帶噪聲干擾器+自航式聲誘餌攻擊潛艇試驗”項目實施方法如下:
1) 目標潛艇以 6~8 kn航速航行,水面艦利用反潛武器系統探測手段或者水下彈道測量手段得到的目標潛艇運動要素信息裝定魚雷射前參數,在D點發射魚雷;
2) 潛艇聲吶在發現來襲魚雷后,依次在A,B,C點發射氣幕彈、自航式聲誘餌和寬帶噪聲干擾器[2],自航式聲誘餌在聯合模式下工作,當噪聲干擾器發射后,目標潛艇進行轉向并加速航行,直至魚雷停車浮起;
3) 該試驗項目在深海和淺海各實施一定條次,具體試驗條次數服從全部試驗任務統籌。
具體試驗航路見圖1[7]。

圖 1 魚雷對抗氣幕彈+寬帶噪聲干擾器+自航式聲誘餌攻擊潛艇試驗航路圖Fig.1 Test route chart of a torpedo counteracting gas curtain bomb + wide band noise jammer + mobile acoustic decoy to attack a submarine
“魚雷對抗氣幕彈+掃頻干擾器+固定式聲誘餌攻擊潛艇試驗”項目實施方法如下:
1) 目標潛艇以 6~8 kn航速航行,水面艦利用反潛武器系統探測手段或者水下彈道測量手段得到的目標潛艇運動要素信息裝定魚雷射前參數,在D點發射魚雷;
2) 潛艇聲吶在發現來襲魚雷后,依次在A,B,C點發射氣幕彈、固定式聲誘餌和掃頻干擾器,在掃頻干擾器發射后,目標潛艇按照圖 1所示航向進行轉向并加速航行[8-9],直至魚雷停車浮起,或者由水聲對抗器材工作母船吊放固定式聲誘餌和掃頻干擾器進行試驗;
3) 該試驗項目在深海和淺海各實施一定條次,具體試驗條次數服從全部試驗任務統籌。
具體試驗航路見圖2。
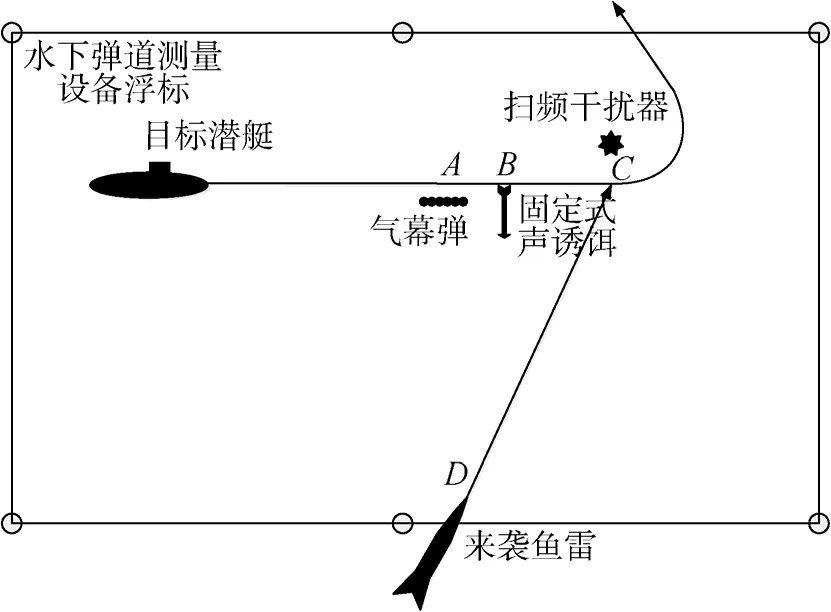
圖 2 魚雷對抗氣幕彈+掃頻干擾器+固定式聲誘餌攻擊潛艇試驗航路圖Fig.2 Test route chart of a torpedo counteracting gas curtain bomb + swept jammer + fixed acoustic decoy to attack a submarine
1.2.6試驗結果評估標準
1) 魚雷對抗氣幕彈+寬帶噪聲干擾器+自航式聲誘餌攻擊潛艇試驗項目
魚雷航行正常,且能正確識別出氣幕彈、寬帶噪聲干擾器和自航式聲誘餌為假目標后執行了反水聲對抗彈道,最終自導發現并捕獲到目標潛艇,該試驗合格;若魚雷不能識別出水聲對抗器材為假目標,航程耗盡時仍未捕獲到目標潛艇,試驗不合格,具體未識別或對抗哪種對抗器材可依據魚雷內記信息及水下彈道測量設備和對抗器材內記信息進行評判并針對該對抗器材進行加試。
2) 魚雷對抗氣幕彈+掃頻干擾器+自航式聲誘餌攻擊潛艇試驗項目
魚雷航行正常,且能正確識別出氣幕彈、掃頻干擾器和固定式聲誘餌為假目標后執行了反水聲對抗彈道,最終自導發現并捕獲到目標潛艇,該試驗合格;若魚雷不能識別出水聲對抗器材為假目標,航程耗盡時仍未捕獲到目標潛艇,試驗不合格,具體未識別或對抗哪種對抗器材可依據魚雷內記信息及水下彈道測量設備和對抗器材內記信息進行評判并針對該對抗器材進行加試。
2 魚雷反對抗作戰能力試驗與評估
2.1試驗目的
檢驗目標潛艇在單獨或組合使用水聲對抗器材且進行戰術機動條件下,魚雷完成反水聲對抗并能夠命中目標潛艇的能力,在此簡化為魚雷在對抗條件下的命中概率試驗與評估。
2.2實航試驗
2.2.1實航試驗項目設置
試驗項目中,綜合考慮魚雷航程、魚雷速制、目標潛艇航速、試驗海區深度、海洋水文氣象條件、魚雷攻擊態勢、目標潛艇的水聲對抗器材使用和機動戰術、水下目標(目標潛艇、魚雷和對抗器材)位置信息的測量等試驗要素。要求目標潛艇采用自身裝備的聲吶探測來襲魚雷,水聲對抗系統解算目標運動要素并自動裝定水聲對抗器材發射參數,發射對抗器材同時,按照水聲對抗戰術進行戰術機動,規避魚雷攻擊[10]。
試驗項目具體可設置如下。
1) 淺海惡劣水文攻擊低速潛艇目標對抗試驗。
該試驗項目細化為
a) 魚雷射距: 大射距、小射距和中等射距;
b) 目標潛艇舷角: 大舷角、舷角和正橫方向;
c) 魚雷速制選擇: 高速或低速。
2) 淺海良好水文攻擊低速潛艇目標對抗試驗。
具體項目的細化同“淺海惡劣水文攻擊低速潛艇目標對抗試驗”。
以上2個試驗項目在整個魚雷反水聲對抗能力試驗中的條次比例相對較大,具體原因同1.2.4。
3) 深海條件攻擊潛艇目標對抗試驗
該試驗項目細化為
a) 水文條件: 良好水文、中等水文和惡劣水文;
b) 目標潛艇航速: 低速、中速和高速,發現來襲魚雷前以低速航行為主;
c) 魚雷射距: 大射距、小射距和中等射距;
d) 目標潛艇舷角: 大舷角、舷角和正橫方向;
e) 魚雷速制選擇: 高速或低速。
2.2.2實航試驗兵力及裝備需求
1) 試驗兵力
試驗兵力需求主要包括魚雷發射平臺、目標潛艇。
魚雷發射平臺由水面作戰艦艇擔任,一般為配備魚雷反潛武器系統的驅護艦1艘。
目標潛艇為某型潛艇 1艘,可發射多種水聲對抗器材,目標潛艇配備合作聲信標,可配合水下彈道測量設備完成目標潛艇的航跡測量。
2) 被試魚雷
輕型智能反潛魚雷,要求具有與戰雷相同的航程,便于在一個航路中多種對抗器材發射布放和魚雷識別對抗的工作時間需求。被試魚雷裝備合作聲信標,可配合水下彈道測量設備完成魚雷航跡的測量。
3) 水聲對抗器材
水聲對抗器材包括氣幕彈、寬帶噪聲干擾器、掃頻干擾器、自航式聲誘餌和固定式聲誘餌。除氣幕彈外,其余水聲對抗器材均配備合作聲信標或其他示位設備,可配合水下彈道測量設備完成水聲對抗器材的位置或航跡信息測量。
2.2.3實航試驗測控需求
1) 水下彈道測量設備
為便于進行對抗試驗試后處理和結果評判,同時為避免單獨依靠魚雷內記系統記錄數據一旦在試驗出現故障或意外時無法進行結果評判或故障定位,要求試驗全過程各水下兵力和裝備全工作過程可測量。在試驗時,將目標潛艇、魚雷和水聲對抗器材的航跡及定點位置(如固定式聲誘餌)信息利用測量設備進行全程測量。
2) 時統系統
為便于試后數據處理和結果評估,要求水面、水下各參試兵力武器系統及裝備采用同一時間標準,在試驗前利用時統系統進行統一授時。
3) 試驗海區環境及目標特性測量設備
用于測量試驗海區深度、試驗海區聲速梯度分布、海底底質地貌測量、魚雷和對抗器材自導頻段內海洋環境噪聲、目標潛艇和對抗器材的輻射噪聲和聲學反射特性測量。全部測量數據為后續進行魚雷反水聲對抗能力仿真試驗進行數據儲備,聲速梯度分布測量也可直接服務與實航試驗。
4) 目標潛艇水聲對抗系統和魚雷作戰平臺武器系統數據錄取設備
目標潛艇水聲對抗系統數據錄取設備用于對來襲魚雷進行探測及運動要素解算及對抗器材射前參數設定進行數據錄取,便于進行試后結果評判。魚雷作戰平臺武器系統用于對目標潛艇進行探測、目標運動要素解算和武器系統射擊諸元裝定等參數進行記錄,便于進行試后結果評判。
2.2.4實航試驗實施過程
魚雷作戰平臺水面搜索目標潛艇,按照一定射距和舷角發射反潛魚雷攻潛,目標潛艇發現來襲魚雷后,水聲對抗系統根據解算的來襲魚雷運動要素進行系統自動解算,解算水聲對抗器材的發射實機、發射航向等信息,發射水聲對抗器材后按照潛艇防御作戰戰術進行戰術機動,直至魚雷航程停車浮起,試驗結束。
水下彈道測量設備全程測量目標潛艇、魚雷和水聲對抗器材的航跡(或位置)信息。
2.2.5實航試驗結果評估標準
在某條次的魚雷攻擊試驗中,若魚雷航行正常,能正確識別出水聲對抗器材為假目標后且執行了反水聲對抗彈道,最終自導發現并捕獲到目標潛艇,計魚雷命中目標1次;若目標潛艇對抗措施有效,魚雷最終未命中目標潛艇,則計魚雷命中目標次數為0,最終統計魚雷命中目標的次數。
實航試驗結束后,采用點估計的方式對魚雷對抗條件下命中概率即反水聲對抗作戰能力進行評估。
2.3仿真試驗
在魚雷實航試驗中,魚雷命中目標1次,不能說明此次魚雷的命中概率為1。同時,采用有限的實航試驗條次數進行命中概率的點估計,雖然可直接服務于作戰使用,但試驗結果的置信度不高,加之在實航試驗中將影響試驗結果的各種因素和變量考慮進去,將全部設想的作戰情形進行實航試驗,必然造成試驗條次數大量增加,試驗經濟成本無法承受,且試驗周期過長。因此,考慮仿真試驗方法,最終采用實航和仿真 2種手段相結合的方式進行魚雷反水聲對抗作戰能力評估。
2.3.1反水聲對抗能力仿真試驗思路
仿真試驗的具體思路為,每進行1條次魚雷的實航反水聲對抗試驗,則將實航試驗測量的試驗海區水文條件、目標環境特性、海底底質及地貌等信息回灌至仿真試驗系統,對該條次實航試驗在一定仿真精度要求下進行仿真試驗[11],評估該實航試驗條次的命中概率。
同時,可在實航試驗條次其他條件不變的前提下,改變若干個變量,比如將目標潛艇的航速由原來的3 kn改為5 kn,將原來的90°攻擊舷角改為125°攻擊舷角進行仿真試驗,得出不同試驗條件下魚雷對抗條件下的命中概率值。在進行仿真試驗的過程中,利用仿真及實航數據可對仿真試驗系統的模型進行驗證和修正。
2.3.2仿真試驗系統構成
在此采用半實物仿真方式實現魚雷反水聲對抗能力評估[12]。仿真試驗系統主要由輕型反潛魚雷、自導仿真接口計算機、仿真主計算機、魚雷自導耦合對接裝置、魚雷內部信息綜合接口、魚雷運動模擬轉臺、深度模擬器、魚雷供電模擬器、魚雷舵角測量裝置、魚雷模擬發控裝置、聲自導目標與環境數字仿真子系統、水聲對抗仿真子系統、仿真綜合操作顯控臺、仿真試驗數據庫、仿真試驗數據采集系統、仿真試驗數據處理與結果評估系統等構成,其中各模塊及子系統通過網絡通信子系統聯接通信。具體結構如圖3所示[13-15]。
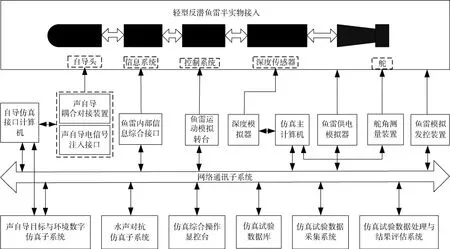
圖3 魚雷反水聲對抗仿真試驗系統Fig.3 Simulation test system for acoustic counter-countermeasure of a torpedo
2.3.3仿真試驗系統工作原理和工作過程
按照圖3所示結構將仿真試驗系統各模塊和子系統進行聯接,在仿真綜合操作顯控臺輸入魚雷射前目標類型、目標距離、目標方位、目標航速、目標航行深度、試驗海區聲速梯度分布、海底底質、海底地貌、試驗海區海況等初始輸入信息[16],試驗初始輸入信息通過網絡通信子系統分別對應輸入到各模塊和子系統,魚雷模擬發控裝置給出魚雷發射信號、深度模擬器、魚雷供電模擬器和舵角測量裝置以及魚雷運動模擬轉臺開始工作,魚雷通過內部信息綜合接口和網絡通信子系統交換信息,自導頭段通過對接裝置進行信號對接,并通過自導仿真接口計算機和網絡通信子系統及聲自導目標與環境數字仿真子系統進行信息交互,在魚雷發射后一定時間,按照實航試驗時對抗器材發射參數設定情況,在仿真綜合操作顯控臺輸入對抗器材發射時間、發射航向或位置信息,試驗過程中,仿真試驗系統依據需要訪問仿真試驗數據庫,仿真試驗數據采集系統實時進行試驗過程數據采集,在仿真試驗結束后,仿真試驗數據處理與結果評估系統計算出魚雷命中概率結果并傳送至仿真綜合操作顯控臺,直至魚雷航程耗盡,通過仿真綜合操作顯控臺中止仿真試驗,其余各設備關機,仿真試驗結束[17-18]。
同時,可在每一條次的仿真試驗中,不施放水聲對抗器材,仿真得出魚雷的命中概率,便于通過有無對抗條件下魚雷命中概率的變化來表征魚雷的反水聲對抗能力。
2.3.4仿真試驗結果評估
1) 針對實航試驗進行的仿真結果評估
每進行一條次的實航對抗試驗,則將試驗時測量的目標運動要素、目標類型、試驗海區深度、試驗海區海底地貌、試驗海區海底底質、海況等信息輸入仿真試驗系統,給出實航試驗每條次的命中概率。
2) 針對實航試驗擴展的仿真試驗結果評估
將實航試驗時其余測量數據不變,單純改變1~2個或者更多個參數輸入仿真試驗系統,得到實航試驗所不能覆蓋條次的仿真試驗結果,給出每條次魚雷對抗條件下命中概率。
3) 仿真試驗結果綜合評估
按照 2.2.5實航試驗結果評估標準的方法,不采用仿真得到的具體命中概率信息,而是采用仿真結果中魚雷最終是否命中目標的結果信息,并以點估計的方式,評估魚雷反水聲對抗條件下命中概率的點估計值。
3 結束語
文中將魚雷反水聲對抗試驗劃分為戰技指標和功能考核、反魚雷作戰能力考核與評估這2個考核層次,按照各自需求進行了試驗方法研究和方案設計,提出了通過仿真試驗和實航試驗相結合的手段進行魚雷反水聲對抗作戰能力評估的思想,并給出了仿真試驗體系的構架,明確了仿真試驗系統的工作原理和工作過程,以及魚雷反水聲對抗作戰能力評估的方法,可為未來面向作戰能力評估的試驗工程實施提供參考。但在反水聲對抗能力試驗中,仍存在以下幾個具體問題有待后續深入研究。
1) 實航試驗和仿真試驗樣本量的設置問題
由于影響試驗結果的試驗因素和變量較多,如魚雷的自導方式、魚雷航速、目標航速、目標方位、試驗海區深度、試驗海區海況、水文條件等,難以單純用正交設計、均勻設計等思想或者2種設計思想的結合來明確樣本量,這是試驗設計學科的難點問題,也是行業內多年未解決的技術瓶頸。
2) 仿真試驗系統的仿真逼真度問題
仿真試驗系統的逼真度從根本上決定了仿真試驗結果的置信度[19]。
若仿真試驗系統逼真度不高,仿真試驗結果基本沒有參考意義,甚至會將實航試驗結果顛覆。因此,在仿真試驗系統建設過程中,要從底層每個模型和每個子系統做好仿真系統的模型校核、驗證與確認等方面的工作。
[1] 楊日杰,高學強,韓建輝.現代水聲對抗技術與應用[M].北京: 國防工業出版社,2008.
[2] 張靜遠.魚雷作戰使用與作戰能力分析[M].北京: 國防工業出版社,2005.
[3] 陳春玉,張靜遠,王明洲,等.反魚雷技術[M].北京:國防工業出版社,2006.
[4] 易紅,何辰,趙偉,等.適合淺海工作的魚雷自導有關問題探討[J].魚雷技術,2006,14(4): 28-31.Yi Hong,He Chen,Zhao Wei,et al.Discussion of Torpedo Acoustic Homing Operation in the Shallow Water[J].Torpedo Technology,2006,14(4): 28-31.
[5] 天鷹.中國海軍反潛體系的未來建設[J].艦載武器,2011(4): 31-34.Tian Ying.Future Development of the PLA-Navy′s Antisubmarine System[J].Shipborne Weapons,2011(4): 31-34.
[6] 何心怡,錢東,王光宇,等.水文條件對魚雷聲自導作用距離的影響[J].魚雷技術,2007,15(5): 33-36.He Xin-yi,Qian Dong,Wang Guang-yu,et al.Influence of Water Conditions on Torpedo Acoustic Homing Range[J].Torpedo Technology,2007,15(5): 33-36.
[7] 朱文振,葉浩亮,葉豪杰.反潛魚雷對抗能力試驗設計與評價方法研究[J].計算機測量與控制,2013,21(5): 1260-1268.Zhu Wen-zhen,Ye Hao-liang,Ye Hao-jie.Research on Torpedo Underwater Acoustic Warfare Capacity Test[J].Computer Measurement & Control,2013,21(5): 1260-1268.
[8] 李長軍,王順意.潛射自航式聲誘餌發射時機與初始航向模型[J].魚雷技術,2010,18(6): 471-475.Li Chang-jun,Wang Shun-yi.Models of Launching Opportunity and Initial Course for Mobile Acoustic Decoy Launched by Submarine[J].Torpedo Technology,2010,18(6): 471-475.
[9] 楊日杰,苗康樂,韓建輝,等.噪聲干擾器最佳布放位置與深度研究[J].兵工學報,2014,35(4): 484-488.Yang Ri-jie,Miao Kang-le,Han Jian-hui,et al.Research on Optimum Location and Depth of Noise Jammer[J].Acta Armaentarii,2014,35(4): 484-488.
[10] 宋志杰,史秋亮.潛艇水聲對抗原理與應用[M].北京:兵器工業出版社,2002.
[11] 孟慶玉,張靜遠,宋保維.魚雷作戰效能分析[M].北京: 國防工業出版社,2003.
[12] 呂海濤,譚鑫,管啟亮.半實物仿真在水聲對抗中的實現方法探討[J].航天電子對抗,2015,31(1): 41-44.Lü Hai-tao,Tan Xin,Guan Qi-liang.HWIL Simulation Method in Acoustic Countermeasures[J].Aerospace Electronic Countermeasure,2015,31(1): 41-44.
[13] 潘悅,皇甫立,韓澎.水聲對抗系統仿真體系架構分析[J].艦船科學技術,2012,34(8): 76-78.Pan Yue,Huang Fu-li,Han Peng.Analysis on Simulation Architecture for Acoustic Countermeasure Systems[J].Ship Science and Technology,2012,34(8): 76-78.
[14] 王小寧,康鳳舉,楊虎,等.含水聲對抗模型的魚雷武器作戰仿真系統[J].火力與指揮控制,2008,33(4): 90-93.Wang Xiao-ning,Kang Feng-ju,Yang Hu,et al.Study on Combat Simulation System of Torpedo Weapon with Underwater Sound Countermeasure Mode[J].Fire Control and Command Contrl,2008,33(4): 90-93.
[15] 劉淼,羅修波.水聲對抗仿真系統中的數據分發管理[J].艦船科學技術,2003,25(6): 46-49.Liu Miao,Luo Xiu-bo.Date Distribution Management in Underwater Acoustic Warfare Simulation System[J].Ship Science and Technology,2003,25(6): 46-49.
[16] 楊云川,崔懷林,李志舜.基于水聲物理場的魚雷制導半實物仿真方法及應用[J].系統仿真學報,2005,17(3): 755-759.Yang Yun-chuan,Cui Huai-lin,Li Zhi-shun.Simulation Method and Application of Torpedo Homing System HWIL Simulation Based on Underwater Acoustic Field[J].Journal of System Simulation,2005,17(3): 755-759.
[17] 孔德永.魚雷武器控制系統半實物仿真系統設計與實現[J].四川兵工學報,2012,33(6): 1-5.
[18] 劉永豐,關國樞,張西建,等.魚雷聲尋的制導半實物仿真系統研究與實現[J].艦船科學技術,2003,25(3): 26-29.Liu Yong-feng,Guan Guo-shu,Zhang Xi-jian,et al.Semi-Physical Simulation System Research and Implementation Approach on Torpedo Acoustical Guidance[J].Ship Science and Technology,2003,25(3): 26-29.
[19] 譚亞新,王立國,楊學會,等.作戰仿真可信性[M].北京: 國防工業出版社,2014.
(責任編輯: 許妍)
Test Methods for Acoustic Counter-Countermeasure of Torpedo Based on Different Evaluation Grade
QI Li-xin,WU Jian-lan
(91388thUnit,The People′s Liberation Army of China,Zhanjiang 524022,China)
On the basis of different evaluation grade,two different test methods for acoustic counter-countermeasure of a torpedo were designed.The first method verifies the tactical and technical indexes and function of acoustic counter-countermeasure of a torpedo via sea trial,and the second method evaluates the torpedo operational capability of acoustic counter-countermeasure evaluation based on combination of sea trial and simulation test.The support conditions and implementation procedures of the tests,as well as the method or standard for evaluation of test results,were presented.The design ideas of the two tests can be applied to finalizing test of a torpedo for evaluating both tactical/technical indexes and operational capability of acoustic counter-countermeasure,and the implement procedures of the proposed test methods are economical and feasible.This study may provide a reference for test and evaluation of acoustic counter-countermeasure of a torpedo.
torpedo;tactical and technical index and function;operational capability;acoustic counter-countermeasure
TJ631.2;TB56
A
1673-1948(2016)03-0227-08
10.11993/j.issn.1673-1948.2016.03.013
2016-02-16;
2016-03-09.
齊立新(1967-),女,高級工程師,主要研究方向為武器仿真試驗總體.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
家庭影院技術(2017年9期)2017-09-26 03:41:45