可控測角精度和范圍的數字陣列單脈沖和差波束優化
2016-10-13 06:32:42馬曉峰沈愛松盛衛星韓玉兵張仁李
電子與信息學報 2016年12期
馬曉峰 沈愛松 盛衛星 韓玉兵 張仁李
?
可控測角精度和范圍的數字陣列單脈沖和差波束優化
馬曉峰 沈愛松 盛衛星*韓玉兵 張仁李
(南京理工大學電子工程與光電技術學院 南京 210094)
針對大角度覆蓋范圍目標快速定位以及機動目標精確角度跟蹤的需要,該文提出一種基于可控測角精度和范圍的數字陣列單脈沖和差波束迭代快速優化算法。算法可以根據期望的測角精度或期望測角區間,以函數形式給出修正的期望和差波束方向圖主瓣區域,然后采用所提出的快速區域加權方向圖綜合算法閉式優化得到和差波束方向圖。該算法通過迭代優化可以在給定輸入信噪比和測角精度需求的前提下,最大化單脈沖角度估計的有效測角區間,或者在給定的測角范圍內,最優化測角精度。
單脈沖角度估計;方向圖綜合;測角精度;測角范圍
1 引言
傳統單脈沖角度估計的和差波束是將兩個相同且部分重疊的波束通過和差網絡得到。當目標在兩波束的交疊軸方向時,和波束輸出最大,差波束輸出為零。當目標偏離交疊軸一小角度時,可以利用差波束與和波束之比來測角。和差單脈沖角度估計具有系統簡單,角度估計精度高等優點,在雷達跟蹤系統中得到廣泛的應用[1,2]。采用多個天線波束合成的和差單脈沖天線,當天線形式和陣列結構確定后,和差波束方向圖以及測角斜率就確定了,其線性測角范圍一般在和波束3 dB波束寬度以內,其測角精度完全與和波束輸出信噪比相關[3],無法實現測角精度和測角范圍之間的權衡和優化。當雷達系統需要在大角度范圍內進行目標檢測和角度估計時,必須進行大角度范圍內的波束掃描[1]。采用數字波束形成技術的有源相控陣雷達則具有更大的方向圖綜合靈活性,可以通過優化和差波束方向圖,有效調節測角精度和測角范圍,在不增加信號處理復雜度的前提下,提高目標定位速度。另外,測角精度和測角范圍之間進行動態優化,還可以有效地提高雷達跟蹤系統針對不同類型機動目標的角度跟蹤性能。
測角精度和測角范圍聯合優化包括兩個問題:(1)在期望測角精度條件下,最大化測角范圍;(2)在給定測角范圍條件下,最優化測角精度。不管是哪方面的優化,都需要建立陣列天線和差波束方向圖與測角精度和測角范圍之間精確的關系,即通過和差波束方向圖與輸入信噪比等參數精確獲得偏離和波束指向不同位置處的測角精度,然后根據期望的測角精度或測角范圍,確定期望的和差波束方向圖特性,并通過快速波束賦形算法逼近期望的和差波束方向圖。
和差波束角度估計精度是衡量系統測角性能的主要指標,雖然在工程上已經給出了單脈沖角度估計均方誤差的近似公式[3],但是對于任意給定權重系數的和差波束,由于沒有充分考慮和差波束方向圖特性,與理論結果還存在一定的偏差。文獻[4]從條件概率分布出發分析了單脈沖比的概率密度函數,文獻[5]引入了平均單脈沖比的概念來減少單快拍單脈沖比的波動,即使用多個和差波束輸出的快拍信號得到平均單脈沖比,通過計算平均單脈沖比的條件概率密度函數,獲得精確的和差波束單脈沖測角精度。
在方向圖綜合方面,以加權最小均方誤差(Weighted Least Mean Squares, WLMS)[6]和加權交替反向投影(Weighted Alternating Reverse Projection, WARP)[7]為代表的最小均方誤差優化類算法具有直觀的優化目標。文獻[8,9]通過快速求解最優期望相位方向圖,獲得更加逼近期望功率方向圖的優化效果,比文獻[6,7]利用前次迭代的相位方向圖作為下一次迭代的期望相位方向圖,具有更快的計算速度。文獻[10]通過方向圖主瓣區和旁瓣區分區加權功率逼近,在實現較高的主瓣賦形精度以及旁瓣電平控制的前提下,有效降低了算法的運算量。另外,基于迭代傅里葉變換的加速技術也開始應用于大型平面天線進行快速低旁瓣綜合[11],并推廣到稀疏直線陣[12]、大型稀疏平面陣[13]和快速零陷生成和跟蹤[14]的方向圖綜合中來。
本文算法以文獻[5]給出的精確和差波束測角精度公式為基礎,提出了一種基于可控測角精度和范圍的數字陣列單脈沖和差波束迭代優化算法。該算法可以根據期望測角精度或期望測角區間,以函數形式給出修正的期望和差波束方向圖主瓣區域,然后采用快速區域加權方向圖綜合算法優化和差波束方向圖。算法通過多次迭代可以在給定信噪比和測角精度需求的前提下,最大化單脈沖角度估計的有效測角區間,或者在給定的測角范圍內,最優化測角精度。非常適合大角度范圍內目標搜索和角度估計,以及提高角度跟蹤系統對不同類型機動目標的角度跟蹤性能。
2 問題方程
2.1 和差單脈沖角度估計模型


(3)

(5)
(6)

2.2 單脈沖角度估計精度計算
參考文獻[5],從條件概率分布出發,通過計算平均單脈沖比的條件概率密度函數,獲得精確的單脈沖測角精度。由多個和差波束輸出快拍信號計算得到的平均單脈沖比為

(9)

其中,
(11a)
(11c)
2.3 優化問題模型
在單脈沖角度估計,測角精度和測角范圍聯合優化的應用中,我們需要對兩種情況進行優化。
上述兩個問題為非線性問題,不能直接求解,第3節將采用方向圖賦形迭代逼近技術來優化和差波束方向圖,開展上述問題的優化求解。
3 快速優化算法
3.1 期望的和差波束方向圖主瓣區形狀確定
由2.1節分析可知,目標角度的極大似然估計對應的差波束的權重系數可以由和波束權重系數對的導數求得,也就是說,差波束幅度方向圖的陣因子可以選取為和波束幅度方向圖陣因子的導數,即
(15)
(17)
采用式(16)和式(17)可以作為修正的和波束、差波束主瓣范圍期望方向圖陣因子。
3.2 和差波束方向圖快速優化算法
3.1節已經給出了和差波束主瓣區期望方向圖。所需的方向圖快速賦形算法應該具有如下特性:(1)主瓣區域盡量逼近期望的方向圖主瓣;(2)旁瓣電平盡量低;(3)計算量盡量小。從歸一化方向圖功率逼近以及區域加權出發,構造和差波束優化算法的代價函數:
(19)

(21a)

(21c)
步驟1 根據式(16)和式(17)陣因子定義以及單元天線方向圖得到期望的主瓣區幅度方向圖;
步驟2 根據式(21a)、式(21b)和式(19)分別計算和;
步驟3 參考文獻[9],分別計算主瓣區每個角度的最優方向圖相位;
步驟5 根據式(22)直接得到和波束或者差波束的權重系數。
3.3 可控測角精度和范圍的單脈沖和差波束優化總流程
步驟5每次迭代均需要判斷優化得到的和差波束的測角區間是否優于前一次迭代的結果,從而確定是否結束迭代,這樣可以保證算法的收斂性。
同樣,針對式(13)的優化問題,在給定陣元最小輸入信噪比條件下,在給定測角區間內,最優化角度估計精度的算法具體步驟如下:
4 算法仿真分析
4.1 測角精度分析
首先對2.2節的測角精度公式進行驗證。設置和波束權重系數為指向的導向性矢量,差波束權重為和波束權重系數的導數,仿真結果經過10000次蒙特卡羅實驗。圖1(a)給出當目標方向位于,輸入信噪比變化時,統計仿真的單脈沖比均方誤差與式(10)計算結果的比較。圖1(b)給出輸入信噪比為10 dB條件下,目標偏離波束中心的角度變化時,統計仿真的單脈沖比均方誤差與式(10)計算結果的比較。
從圖1可以看出,式(10)計算得到的結果與統計仿真結果吻合,式(10)可以精確計算給定和差波束,在不同輸入信噪比和不同目標角度的測角精度。還可以看到,當目標偏離和波束中心后,測角誤差迅速增大,這是因為當目標偏離和波束的3 dB波束寬度范圍,和波束增益迅速下降,測角誤差急劇增加。此時,雖然在指向附近測角精度很高,但有效測角區間較小,若需要較大的測角區間,需要對和差波束方向圖進行優化。
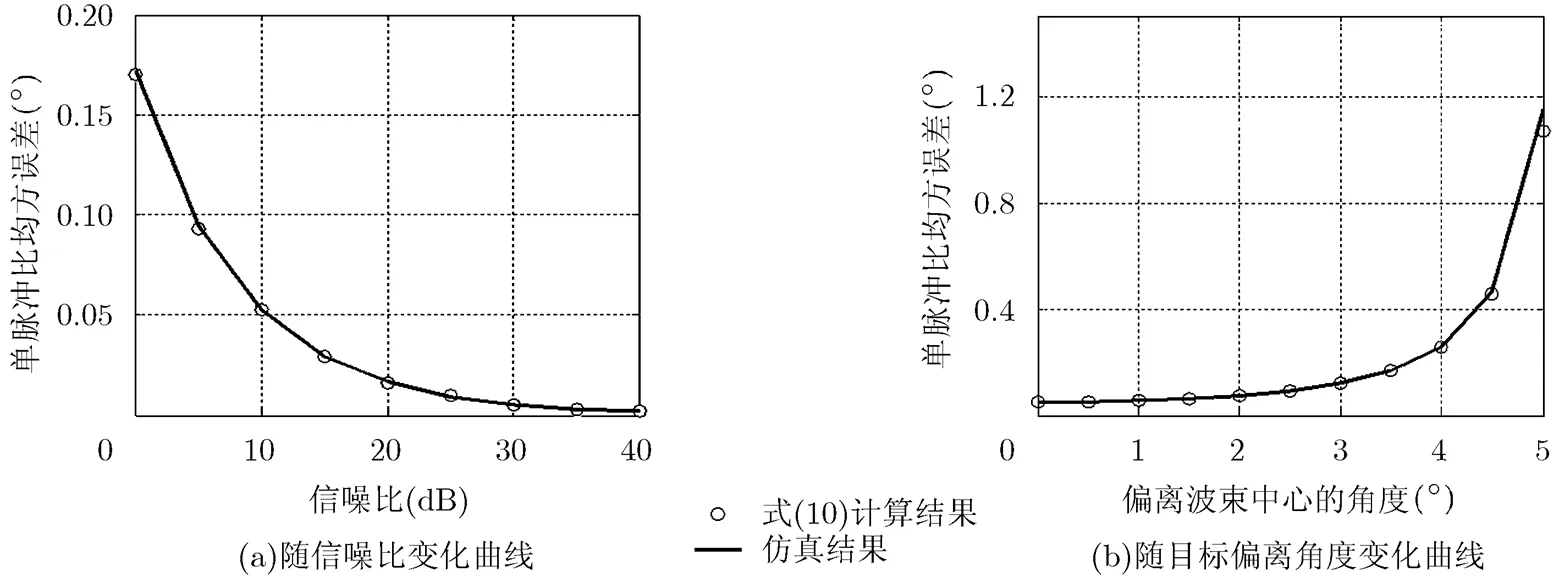
圖 1 單脈沖比均方誤差仿真結果與式(10)計算結果比較
4.2 最大化測角區間性能仿真
由式(10)計算得到,指向法線方向的初始化和差波束,在輸入信噪比為10 dB時,滿足測角均方誤差小于的測角范圍為,現要保持測角精度優于的前提下,最大化有效測角區間。我們設置和差波束方向圖允許的主瓣抖動和期望的旁瓣電平分別為和。那么,按照3.3節的算法流程,優化過程如下:
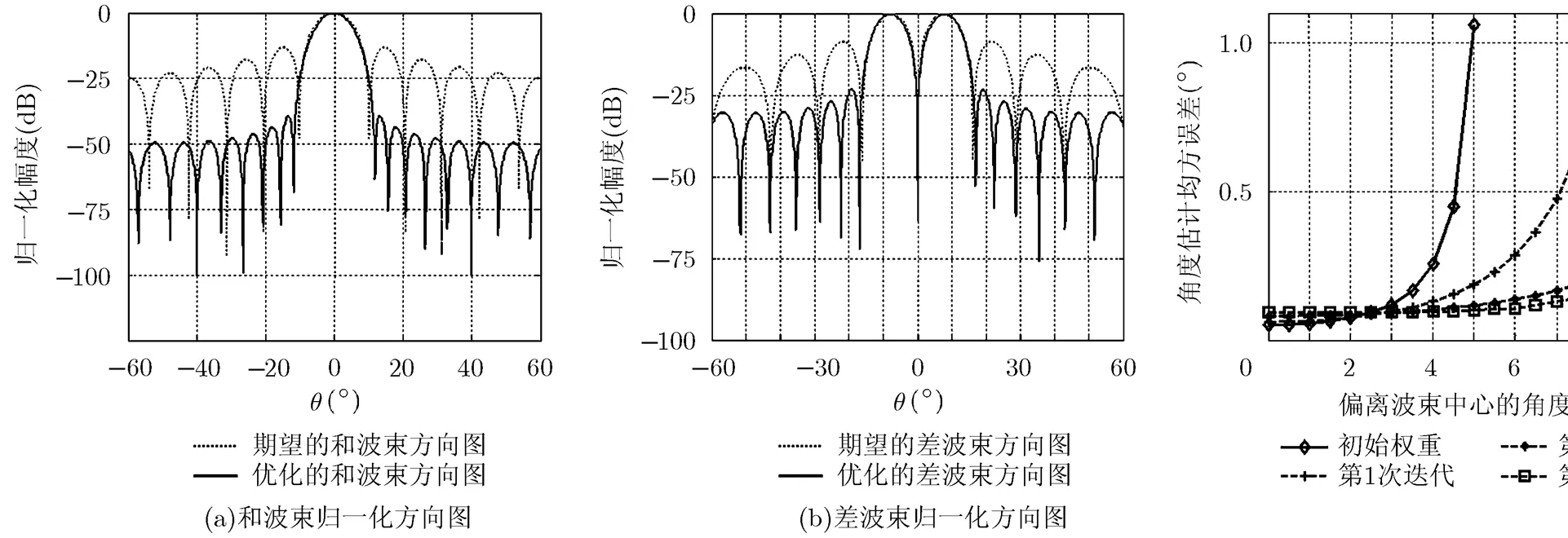
圖2 第1次迭代期望和優化得到的和差波束歸一化方向圖 圖3 優化前后側角誤差對比
表1 迭代優化過程中賦形方向圖特性與測角性能

迭代次數標號和波束3 dB寬度和波束旁瓣電平(dB)差波束旁瓣電平(dB)測角區間 10.59 7.8-41.6-23.8 8.8 20.3814.4-48.2-28.212.6 30.2918.8-52.9-33.415.6 40.2123.6-59.8-39.215.4
表2 不同波束指向化前后測角區間的變化情況

波束指向015304560 優化前測角區間 6.6 7.8 7.2 7.26.4 優化后測角區間15.616.013.412.89.6
4.3 最小化測角誤差性能仿真
同樣,由式(10)計算得到,指向法線方向的初始和差波束,在輸入信噪比為時,給定測角區間內,波束指向和測角邊緣方向的測角精度分別為和,在整個測角區間內測角精度變化較大。下面在給定的測角區間內,最優化角度估計精度。設置。
表3給出了算法每次迭代的優化結果。可以看到,經過兩次迭代,測角區間邊緣處的測角精度得到了明顯提高,在測角區間內的測角精度一致性有效改善。
表3 迭代優化過程中方向圖特性與測角性能

迭代次數標號和波束3 dB寬度波束指向的測角區間邊緣的 10.4510.00.0670.119 20.3814.40.0850.099 30.3216.80.0880.104

表4 不同波束指向化前后測角精度的變化情況
5 結論
本文提出了一種可控測角精度和測角范圍的數字陣列天線單脈沖和差波束優化算法。該算法以精確的單脈沖測角精度公式為基礎,通過迭代不斷修正期望和差波束方向圖,并采用基于快速區域加權最小均方誤差波束賦形算法逼近期望的和差波束方向圖。修正的期望和差波束方向圖主瓣區特性直接以函數形式給出。所提出的快速波束賦形算法代價函數中加權因子直接確定,具有明確的物理意義,并可以直接閉式優化得到最優權重系數。所提出的迭代優化算法得到的和差波束可以在給定輸入信噪比和測角精度需求的前提下,最大化單脈沖角度估計的有效測角區間,或者在給定的測角范圍內,最優化測角精度。非常適合大角度范圍內目標搜索和角度估計,以及提高角度跟蹤系統對不同類型機動目標的角度跟蹤性能。
參考文獻
[1] SKOLNIK M I. Radar Handbook[M]. New York: McGraw Hill, 1990, Chapter 18.3.
[2] MOSCA E. Angle estimation in amplitude comparison monopulse[J]., 1969, AES-5(2): 205-212. doi: 10.1109/ TAES.1969.309906.
[3] YU K B and MURROW D J. Adaptive digital beamforming for angle estimation in jamming[J]., 2001, 37(2): 508-523. doi: 10.1109/7.937465.
[4] TULLSSON B E. Monopulse tracking of Rayleigh targets, a simple approach[J]., 1991, 27(3): 520-531. doi: 10.1109/ 7.81434.
[5] NICKEL U. Performance of corrected adaptive monopulse estimation[J].-,, 1999, 146(1): 17-24. doi: 10.1409/ip-rsn:19990257.
[6] VASKELAINEN L I. Iterative least-squares synthesis methods for conformal array antennas with optimized polarization and frequency properties[J]., 1997, 45(7): 1179-1185. doi: 10.1109/8.596912.
[7] HADDADI A, GHORBANI A, and RASHED-MOHASSEL J. Cosecant-squared pattern synthesis using a weighted alternating reverse projection method[J].&, 2011, 5(15): 1789-1795. doi: 10. 1049/iet-map.2011.0056.
[8] COMISSO M and VESCOVO R. Fast iterative method of power synthesis for antenna arrays[J].&, 2009, 57(7): 1952-1962. doi: 10. 1109/TAP.2009.2021894.
[9] VASKELAINEN L I. Constrained least-square optimization in conformal array antenna synthesis[J]., 2007, 55(3): 859-867. doi: 10.1109/TAP.2007.891860.
[10] 馬曉峰, 馮丹萍, 吳玉清, 等. 一種星載陣列天線的高效波束賦形算法[J]. 電波科學學報, 2016, 31(3): 479-485. doi: 10.13443/j.cjors.2015083101.
MA X F, FEN D P, WU Y Q,. An efficient pattern synthesis method for satellite array antenna[J]., 2016, 31(3): 479-485. doi: 10. 13443/j.cjors.2015083101.
[11] KEIZER W P M N. Fast low-sidelobe synthesis for large planar array antennas utilizing successive fast fourier transforms of the array factor[J]., 2007, 55(3): 715-722. doi: 10. 1109/TAP.2007.891511.
[12] KEIZER W P M N. Linear array thinning using iterative FFT techniques[J].,2008, 56(8): 2757-2760. doi: 10.1109/TAP.2008. 927580.
[13] KEIZER W P M N. Synthesis of thinned planar circular and square arrays using density tapering[J], 2014, 62(4): 1555-1563. doi: 10.1109/TAP.2013.2267194.
[14] 馬曉峰, 陸樂, 盛衛星, 等. 干擾子空間正交投影快速零陷跟蹤波束賦形算法[J]. 電子與信息學報, 2016, 38(10): 2560-2567. doi: 10.11999/JEIT151438.
MA X F, LU L, SHENG W X ,. Fast nulls tracking pattern synthesis based on jammer dubspace orthogonal projection[J].&,2016, 38(10): 2560-2567. doi: 10.11999/ JEIT151438.
[15] NICKEL U. Overview of generalized monopulse estimation[J]., 2006, 21(6): 27-56. doi: 10.1109/MAES.2006.1662039.
[16] NICKEL U. Statistical performance prediction of generalized monopulse estimation[J]., 2011, 47(1): 381-403. doi: 10.1109/ TAES.2011.5705682.
馬曉峰: 男,1981年生,講師,研究方向為陣列信號處理與雷達信號處理.
沈愛松: 男,1994年生,碩士生,研究方向為陣列信號處理.
盛衛星: 男,1966年生,教授,博士生導師,研究方向為陣列信號處理、雷達信號處理與雷達成像等.
韓玉兵: 男,1972年生,教授,博士生導師,研究方向為圖像處理、陣列信號處理等.
張仁李: 男,1986年生,副教授,研究方向為雷達信號處理等.
Sum and Difference Patterns Optimization for Digital Array with Controllable Accuracy and Range of Angle Estimation
MA Xiaofeng SHEN Aisong SHENG Weixing HAN Yubing ZHANG Renli
(,,210094,)
A fast iterative optimization algorithm for sum and difference patterns with controllable accuracy and range of angle measurement is proposed, which can be used in fast targets location under wide angle coverage and accurate angle tracking of maneuvering targets. Under expected accuracy or range of angle estimation, the expected main-lobe of sum and difference patterns are modified in the form of sinc function and its derivative respectively, then the sum and difference patterns are rapidly synthesized with the proposed regional weighting pattern synthesis algorithm in the close form. The proposed iterative optimization algorithm can effectively maximize the range of effective angle measurement at a given input signal to noise ratio and angular accuracy, or get optimal accuracy within a given range of angle measurement.
Monopulse angle estimation; Pattern synthesis; Angle estimation accuracy; Angle estimation range
TN957.51; TN820.1+2
A
1009-5896(2016)12-3107-07
10.11999/JEIT160873
2016-08-24;改回日期:2016-12-08;
2016-12-14
盛衛星 shengwx@njust.edu.cn
國家自然科學基金(61501240, 11273017),上海航天基金重點項目(SAST201437)
The National Natural Science Foundation of China (61501240, 11273017), The Key Project of Shanghai Aerospace Foundation of China (SAST201437)
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年3期)2021-03-18 13:44:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
計算機應用(2021年1期)2021-01-21 03:22:38
