旋翼機地面監控系統
2016-10-14 00:08:10王曉永孫粉妮劉成茂
移動信息 2016年7期
楊 輝 王曉永 孫粉妮 劉成茂
?
旋翼機地面監控系統
楊 輝 王曉永 孫粉妮 劉成茂
西安航空電子科技有限公司,陜西 西安 710075
基于旋翼機飛行訓練與執行任務的需求,采用了空中與地面互聯網+北斗雙鏈路的通信方式,將該系統應用于某型旋翼機上,使地面監控系統與機載航電系統有效結合起來。實現了地面指揮中心對旋翼機飛行狀態的監控與指揮。
監控;互聯網+;電子地圖引擎
引言
基于互聯網+的旋翼機地面監控系統是一種將現代無線通信和計算機技術緊密結合的保障特種旋翼機飛行訓練和任務執行的服務系統。它將飛行中飛機的各種關鍵信息經機載航電設備編碼后通過4G DTU模塊轉發至互聯網,地面服務器接收信息后,以立體化形式顯示給用戶,從而實現對飛機的實時監控。同時,監控中心還可以向旋翼機發送短消息與飛行任務,實現對飛機的遠程調度與管理[1]。
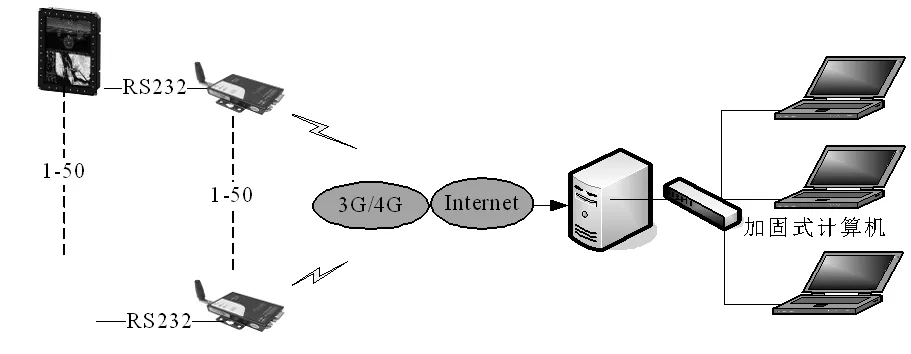
圖1 監控系統示意圖
1 旋翼機地面監控系統的設計
1.1 系統組成
旋翼機地面監控系統由地面監控中心、機載航電系統、4G DTU及天線、北斗數傳模塊、地面服務器組成。監控系統示意圖如圖1所示[2]。
1.2 系統工作原理
該地面監控系統主要完成對旋翼機飛行及機載設備狀態的實時監控。通過在旋翼機裝備綜合顯控設備以及數據傳輸模塊,同時運行監控應用程序和服務器端后臺數據管理程序。
設備上電后,數據傳輸模塊會自動與服務器端連接,數據傳輸模塊信號燈點亮,此時,綜合顯控設備通過RS232串口向數據傳輸模塊周期發送飛機狀態參數,數據傳輸模塊經過基站最終將數據轉發至INTERNET。
各個監控終端通過訪問服務器的方式獲取飛機回傳數據,并在監控軟件中更新飛機狀態,當網絡信號較差時,系統會自動切換至北斗數傳模塊將數據傳給地面終端,旋翼機地面監控系統設計總體框架如圖2所示[3]。
1.3 軟件設計
監控中心軟件基于以VS為開發環境,VC++為編程語言進行開發。將自主研發的QNX電子地圖引擎移植到WINDOWS下,作為靜態庫文件供主程序調用,結合MFC控件操作實現電子地圖的基本功能。
監控軟件運行在客戶端監控主機上,數據管理軟件運行在服務器端。兩者通過以太網進行數據傳輸。主界面為柵格地圖或航圖,用來顯示監控飛機的位置以及飛行狀態參數,用戶可以瀏覽和操作地圖,實現縮放、移動地圖、航線與航跡繪制功能。
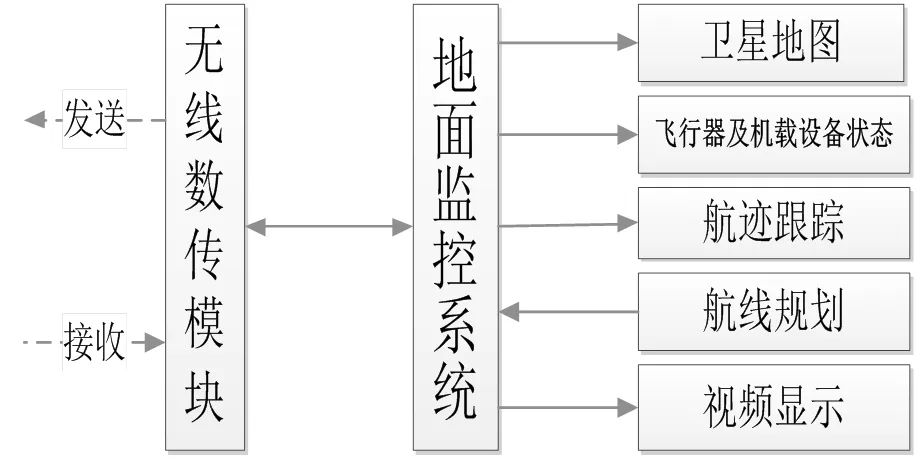
圖2 旋翼機地面監控系統組成原理框圖
外部數據庫主要完成飛機數據信息管理與記錄功能。主要包括在線飛機飛行起始時間記錄、航跡點記錄、報警處理記錄、飛機管理、用戶管理等。這些信息都采用SQLITE數據庫系統進行維護和管理。
1.4 硬件組成
地面終端硬件基本組成如下:便攜式筆記本或臺式機一臺,服務器一臺,數傳模塊(含4G流量卡),北斗數傳模塊一臺,固定IP一個[4]。
1.5 功能實現
1.5.1 柵格地圖引擎移植與功能實現
地圖引擎的實現是通過將QNX下開發的柵格地圖引擎移植到WINDOWS XP下VS開發環境的MFC框架下。地圖引擎主要完成柵格地圖的顯示,縮小、放大、移動、位置拾取、航線添加與刪除、航跡繪制功能[5]。
地圖引擎數據庫采用通用標準格式MBTiles存儲谷歌瓦片數據,地圖定位坐標采用墨卡托投影坐標。接收到經緯度數據后,地圖引擎經過坐標轉換后,得出地圖瓦片行列號,再查詢數據庫得到對應二進制BLOB數據并解碼后,用OPENGL紋理貼圖方式完成柵格地圖與飛機圖標的繪制[6]。
1.5.2 通信鏈路實現
通信鏈路主要采用互聯網+北斗雙鏈路工作方式,保證飛行訓練與執行任務的可靠性。在移動網絡信號正常情況下,機載航電設備以1Hz頻率將數據幀通過RS232串口發送至4G DTU,然后DTU將數據轉發至監控中心。數據更新率為1Hz。當飛機飛行至移動網絡無信號或監控中心接收數據延時超過20s時,系統會自動切換鏈路,采用北斗數傳模塊進行數據傳送,此時,機載航電設備會通過串口將數據幀發送至機載北斗終端,由機載北斗終端將數據發送至地面北斗終端,再發送至監控中心,發送周期為60s[7]。
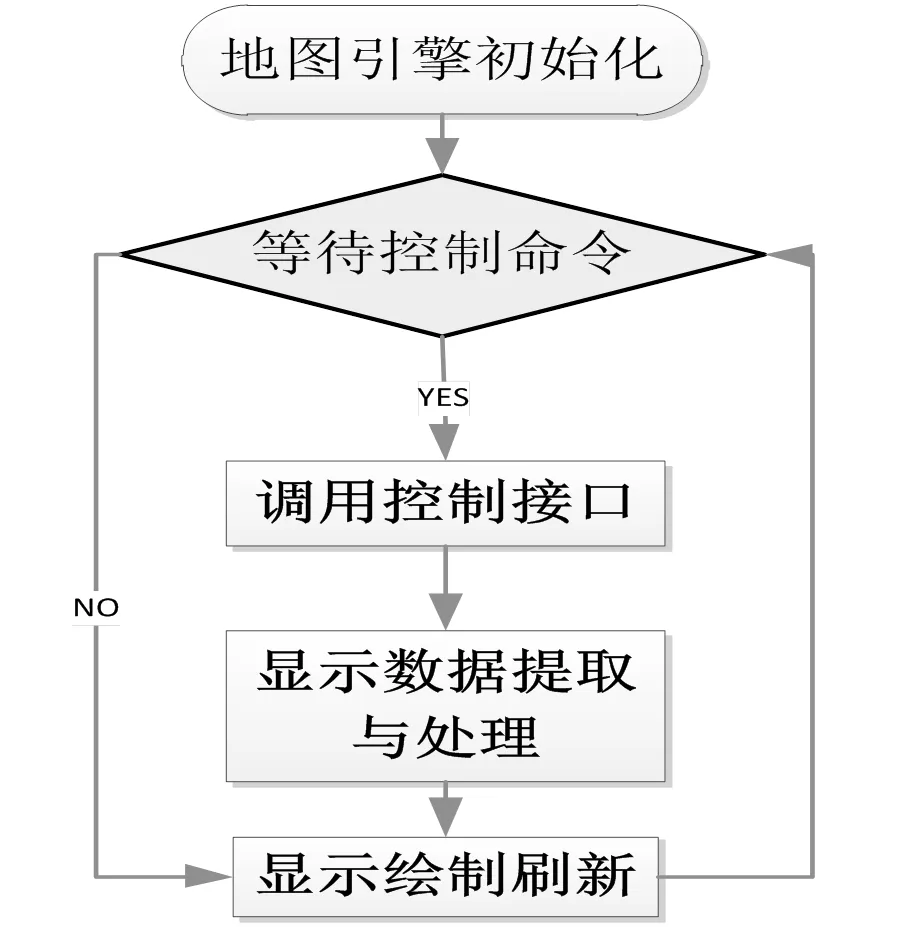
圖3 地圖引擎工作整體流程
2 結論
該旋翼機監控系統利用綜合顯控器和數傳模塊作為旋翼機終端設備,地面監控中心作為服務器端,二者通過雙備份鏈路進行數據通信。該系統可支持100架旋翼機同時在線飛行,并向其發送飛行任務或短消息指揮其飛行,支持保存、查詢、回放飛行記錄軌跡。該系統可以滿足旋翼機監控系統的要求,并將成本控制在合理的范圍內[8]。
[1]任懷令,佟繼紅.基于四旋翼飛行器無線視頻監控系統開發[J].黑龍江科技信息,2014(7):79.
[2]胡愛民,湯愛武,徐升.基于四旋翼無人機的人員體征監測系統[J].無線電工程,2014(11):41-44.
[3]周健,洪良,李文超.小型單旋翼無人直升機系統的設計與實現[J].西安工程大學學報,2014(5):626-630.
[4]張斌.美國新型旋翼機設計方案分析[J].現代軍事,2014(7):40-43.
[5]陳曉,王新民,黃譽,等.傾轉旋翼機飛控系統的變精度粗糙集-OMELM故障診斷方法[J].控制與決策,2015(3):433-440.
[6]任懷令,佟繼紅.基于四旋翼飛行器無線視頻監控系統開發[J].黑龍江科技信息,2014(7):79.
[7]胡愛民,湯愛武,徐升.基于四旋翼無人機的人員體征監測系統[J].無線電工程,2014(11):41-44.
[8]周健,洪良,李文超.小型單旋翼無人直升機系統的設計與實現[J].西安工程大學學報,2014(5):626-630.
Rotorcraft Ground Monitoring System
Yang Hui Wang Xiaoyong Sun Fenni Liu Chengmao
Xi'an Aero Electronic Technology Co.,Ltd.,Sanxi Xi'an 710075
Based on the demand for rotorcraft flight training and perform tasks,using air and ground communications Internet + Compass dual-link,the system was applied to a certain type of rotorcraft,so that the ground monitoring system and on-board avionics systems effectively combine stand up.To achieve a ground command center for rotorcraft flight monitoring and command.
monitoring;internet +;electronic map engine
V249.32
A
1009-6434(2016)07-0010-02
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
環球時報(2022-05-30)2022-05-30 15:16:57
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
當代陜西(2019年11期)2019-06-24 03:40:28
商周刊(2017年22期)2017-11-09 05:08:31
家庭影院技術(2017年9期)2017-09-26 03:41:45
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33
小學生導刊(低年級)(2016年8期)2016-09-24 22:09:04
河南電力(2015年5期)2015-06-08 06:01:46