光電傳感導盲機器人的設計與制作
2016-10-18 04:50:57梁蘭菊楊秀成李峰
棗莊學院學報 2016年5期
梁蘭菊,楊秀成,李峰
(1.天津大學精密儀器與光電子工程學院,天津 300072;2.棗莊學院光電工程學院,山東棗莊 277160)
?
光電傳感導盲機器人的設計與制作
梁蘭菊1,2,楊秀成2,李峰2
(1.天津大學精密儀器與光電子工程學院,天津300072;2.棗莊學院光電工程學院,山東棗莊277160)
采用履帶式底盤作為主體,通過GPS,電子羅盤定位,通過超聲波距離傳感器和光電傳感對行進方向的障礙檢測,最后經DSP對各個模塊反饋的數據進行綜合分析處理后控制履帶底盤以預設目的地為終點行進,實現無人操控,自助導引安全到達目的地.
導盲;DSP;電子羅盤;GPS;履帶①
0 引言
隨著光電傳感技術的發展,它所應用的領域越來越廣泛,導盲機器人可以幫助盲人到達指定目的地.將光電傳感技術與導盲機器人的實際應用結合起來實現幫助盲人行走是本論文的主要研究內容.
1 硬件設計
1.1底盤選擇
采用定制的履帶式底盤作為動力.金屬骨架,螺釘連接,具有結構簡單,結實易操控等特點.雙履帶分別由兩個相同型號的的大功率電機驅動,履帶采用防滑,成本低的塑料履帶.由于電機工作需要較大的電流,所以電機驅動采用L298N的驅動模塊,最大輸出電流可達到2A安培,4路控制信號輸入,分別為兩個正轉信號,和兩個反轉信號,這四個信號分別由DSP給出.兩路12v大電流輸出,直接連接電機.同時L298N有5v穩壓功能,為控制單元提供穩定的電源.

圖1 履帶底盤 圖2 光電對管
1.2防撞和防踏空設計
圖3是超聲波傳感器,采用四個超聲波距離傳感器分別安裝在前后左右四個方向以檢測行進方向凸起的障礙物.聲波產生器產生8個40kHz的聲波,聲波遇到物體后反射回來,當模塊檢測返回的聲波時給單片機P1^0引腳輸入高電平,電平持續時間等于聲波發射時間加聲波接收時間,其所測距離等于(高電平時間*聲速(340M/S))/2;
防踏空由四個光電對管組成,圖2是光電對管分別安裝在底盤的四個角上,通過一個紅外燈泡向地面發射紅外光線,同時有一個檢測紅外的傳感器,檢測反射回來的光線,當檢測不到時表示該方向上的路面是凹進去的不易繼續前進,則繞行.

圖3 超聲波傳感器 圖4 GPS模塊
1.4GPS定位模塊
圖4是GPS模塊,采用neo-6m型GPS模塊,為了增強信號的收發能力,把模塊安裝在機器最上層,并加裝陶瓷天線.
1.5電子羅盤
圖5是電子羅盤安裝的位置,圖6是電子羅盤,采用GY-26型電子羅盤,是通過檢測地磁場判斷東西南北,為了降低機器其他模塊產生的磁場干擾,和機器其他金屬器件對地磁場的屏蔽,同時放大機器的偏離角度,用塑料條把模塊向后水平支出15cm,并保持模塊的南北軸線與機器前后方向平行.5v供電,與單片機的數據交換同樣采用串口TXD和RXD.
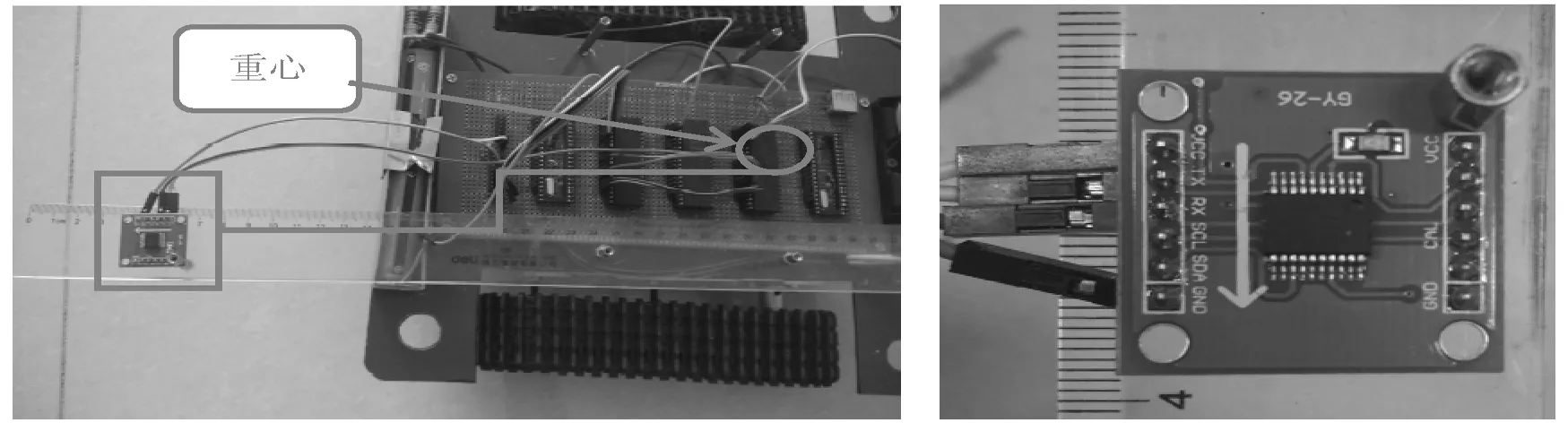
圖5 電子羅盤的安裝位置 圖6 電子羅盤
1.6控制單元設計
圖7是控制方框圖,圖8是單片機的引腳分布和外圍電路控制單元,圖9是DSP28335模塊.由一個DSP做綜合運算,5個單片機分管各個模塊的協作方式,大大簡化程序的編寫.多個單片機分別采集超聲波模塊和光電對管以及電子羅盤的數據,統一送入DSP根據數據判斷當前的位置是否有障礙物是否偏離預定路線,做綜合分析處理后輸出電機的控制信號,控制電機做出正確的動作.
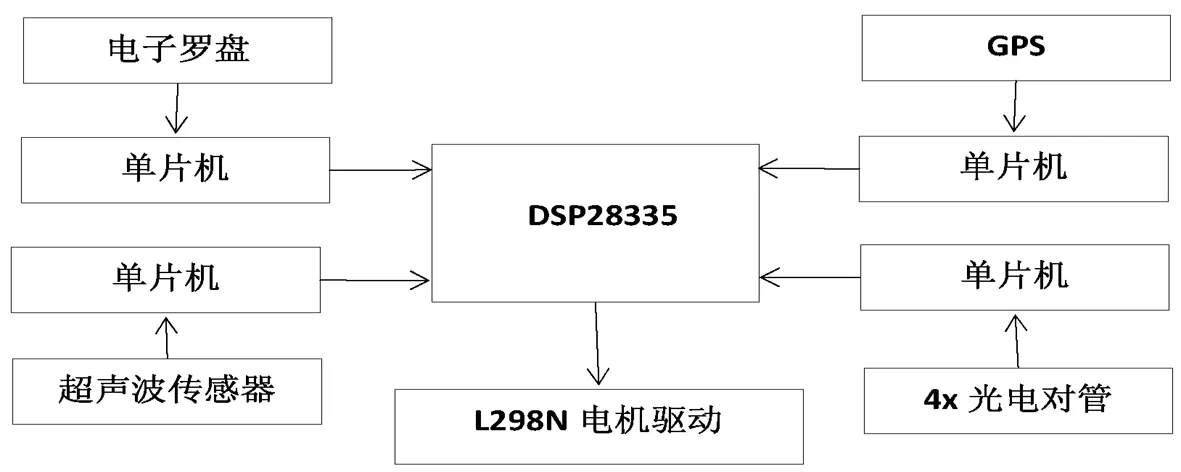
圖7 控制方框圖
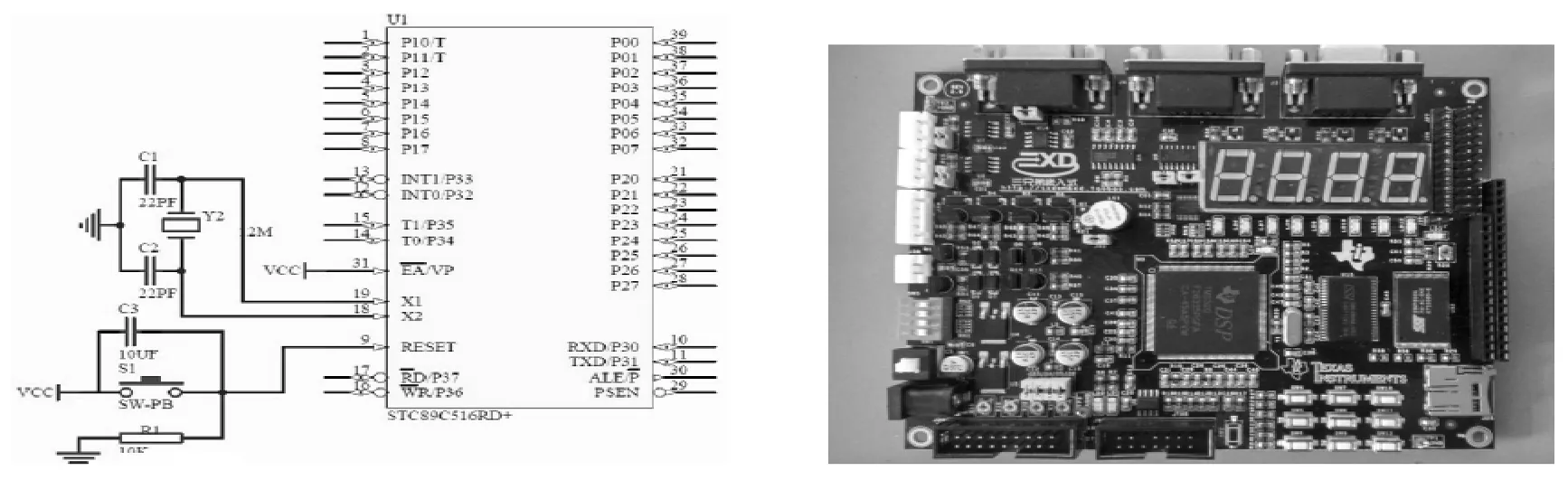
圖8 單片機的引腳分布和外圍電路 圖9 DSP28335模塊
2 系統程序設計
2.1程序流程圖
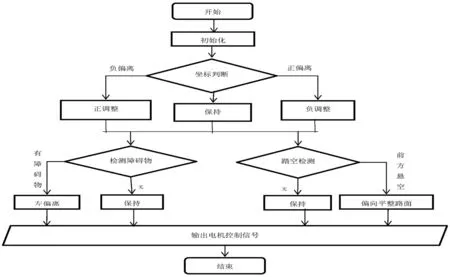
圖10 導盲機器人程序設計流程圖
2.2程序設計的總體思路
為了簡化程序設計的難度,對于導盲機器人的整體程序設計思路,首先根據各模塊的復雜程度給其劃分獨立的單片機,具體分配如下表1,通過單片機驅動和控制各模塊并把采集的數據統一輸入DSP28335模塊.各個模塊的驅動程序統一采用廠商提供的例程,根據自己設計的電路修改例程中的輸入輸出端口.
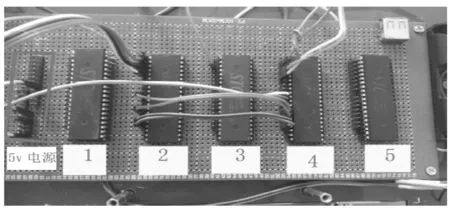
圖11 5塊單片機的位置和編號

單片機標號對應模塊與單片機引腳連接關系單片機1GPS模塊P1^0=TXDP1^1=RXDP3^4=PPS單片機2電子羅盤P1^0=TXP1^1=RX單片機3超聲波1超聲波2P1^0=EchoP1^1=Trig單片機4超聲波3超聲波4P1^0=EchoP1^1=Trig單片機5光電對管x4P1^0P1^1P1^2P1^3
2.3DSP28335程序設計
首先給各個單片機分配輸入引腳,和定義輸出引腳,其對應關系如下表2,然后設置各路數據的優先級.
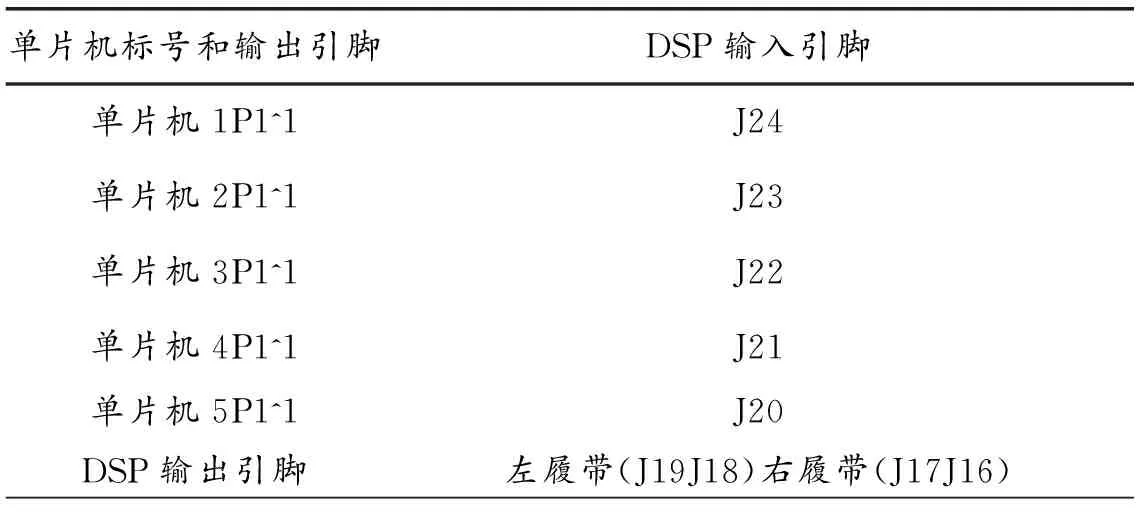
表2 DSP與單片機連接關系
第一優先級,超聲波和光電對管,前方路面是否有障礙,和前方路面是否是懸崖,有障礙則轉向左,有懸崖則轉向左或者右路面,前方正常,則繼續前進.
第二優先級,電子羅盤,偏離預設方向角度超過15°,則向反方向調整,否則繼續前行.
第三優先級,GPS,對比預設的起始地和目的地的坐標,讓機器的起始地址朝趨向目標地址的方向行進.
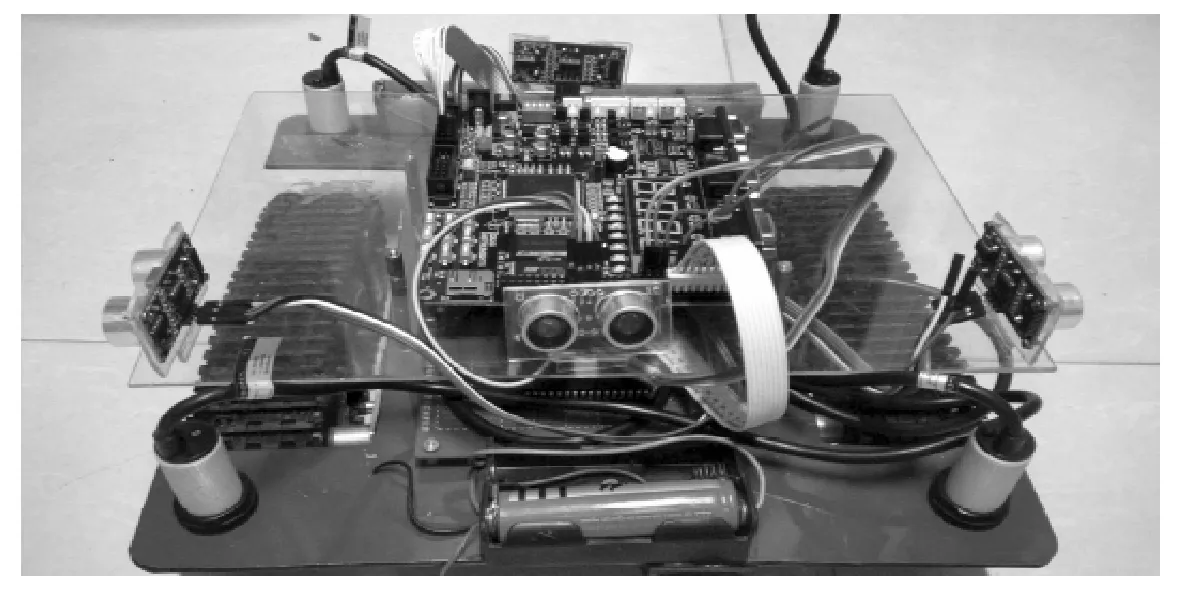
圖12 整體實物圖
3 結論
導盲機器人通過GPS和電子羅盤定位,加上超聲波距離傳感器和光電對管對路障和路面的檢測,能夠實現自主避開障礙物,避開邊沿,向預設目的地前行.根據預設功能,設計了硬件與整體電路,并根據硬件與整體電路設計了相應的部分程序.利用DSP28335的快速處理運算能力,能對復雜的程序做出快速的響應,對5個獨立的89c51單片機返回的數據進行分析處理,實現根據當前路面情況和預設目的地輸出合理的控制信號控制機器前行.
[1]尼庫(Niku, Saeed B).機器人學導論:分析、控制及應用[M].北京:電子工業出版社,2013.
[2]李琦.機器人創新設計與制作[M].北京:中國農業大學出版社,2012.
[3]蔡自興.機器人學基礎(第2版)[M].北京:機械工業出版社,2015.
[4]庫克 (Cook, David).機器人制作晉級攻略[M].北京:人民郵電出版社,2013.
[5]王元一,石永生,趙金龍.單片機接口技術與應用:C51編程[M].北京:清華大學出版社,2014.
[6]周樂挺.傳感器與檢測技術[M].北京:高等教育出版社,2014.
[7]王斌.傳感器檢測與應用[M].北京:國防工業出版社,2014.
[責任編輯:閆昕]
The Design and Manufacture of Seeing-Eye Robot Using Photoelectric Sensor
LIANG Lan-ju1,2,YANG Xiu-cheng2,LI Feng2
(1.College of Precision Instrument and Opt- Engineering, Tianjin University,Tianjin 300072,China;2.School of Opt-Electronic Engineering, Zaozhuang University, Zaozhuang 277160,China)
The crawler chassis as the main body, through the GPS, electronic compass positioning, on the direction of the obstacle detection by ultrasonic distance sensor and photoelectric sensor, finally by DSP was analyzed for each module, feedback data control to a preset destination chassis for the end of March, to achieve unmanned, self-help guide safe arrival at the destination.
guide; DSP; electronic compass; GPS; track
2016-09-01
中國博士后科學基金(項目編號:2015M571263);棗莊學院博士基金;棗莊學院"光電科學與技術"創新團隊(項目編號:4350308);棗莊學院教改重點項目(項目編號:1021402);棗莊學院2016年大學生SRT項目(項目編號:2016003).
梁蘭菊(1979-),女,山東菏澤人,天津大學精密儀器與光電子工程學院在職博士后,棗莊學院光電工程學院副教授,博士,主要從事光電科學與技術研究.
O439
A
1004-7077(2016)05-0090-05
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年19期)2017-02-02 07:08:27