基于組網雷達的空間旋轉對稱進動目標三維重構
2016-10-18 02:06:48胡曉偉童寧寧王建業丁姍姍趙小茹
系統工程與電子技術 2016年10期
關鍵詞:方法
胡曉偉, 童寧寧, 王建業, 丁姍姍, 趙小茹
(空軍工程大學防空反導學院, 陜西 西安 710051)
?
基于組網雷達的空間旋轉對稱進動目標三維重構
胡曉偉, 童寧寧, 王建業, 丁姍姍, 趙小茹
(空軍工程大學防空反導學院, 陜西 西安 710051)
對于空間旋轉對稱進動目標,單部雷達成像僅能獲得目標在雷達視線(line of sight,LOS)方向的一個切面,無法反映目標真實的三維結構,同時進動增加了成像的復雜度。利用組網雷達多視角觀測的特點,提出一種基于組網雷達的旋轉對稱進動目標三維重構方法。首先建立了旋轉對稱進動目標的回波模型;在估計視線-軸線夾角的基礎上,采用復數逆投影方法實現進動目標的二維成像,并分析了允許的夾角誤差范圍;基于分布式雷達二維圖像,提出一種適用于旋轉對稱目標的三維重構方法,通過對各二維圖像進行空間定標、匹配融合、強點檢測和曲線圓擬合,最終實現目標的三維重構;最后通過仿真實驗初步驗證了該方法的有效性。
組網雷達; 旋轉對稱進動目標; 復數逆投影; 三維重構
0 引 言
彈道目標識別是當前彈道導彈中段防御的熱點和難點。雷達成像能夠提供目標直觀的外形和結構特征,是中段目標識別的一個重要手段。進動是彈道中段目標特有的微動形式[1],會導致目標姿態的快速變化,使得以往的勻速小轉角成像方法不再適用。同時,彈道目標多為旋轉對稱結構,目標的自旋運動對回波沒有調制,因此單部雷達獲得的始終是雷達視線方向上目標一個切面的信息,無法據此重構彈道目標真實的三維空間結構。因此,有必要針對空間旋轉對稱進動目標的三維重構方法開展研究。
關于空間進動目標二維成像,目前已取得一些研究成果。文獻[2]利用窄帶雷達實現了空間進動錐體目標的二維成像;文獻[3]提出了一種基于后向投影變換的空間進動目標成像新方法;文獻[4]將匹配追蹤(matching pursuit,MP)稀疏分解引入彈道目標成像,提出了一種彈道中段目標微動逆合成孔徑雷達(inverse synthetic aperture radar,ISAR)成像方法;對于空間非旋轉對稱進動目標,文獻[5]基于時頻分析技術,研究了旋轉對稱進動目標的二維成像方法。而目前國內外關于空間進動目標三維成像方面研究還較少[6],現有研究多集中在空間自旋目標的三維成像[7-10]。但已有一些關于進動目標三維特征提取與運動參數估計方面的研究,如文獻[11]基于組網雷達研究了有翼彈道目標三維進動特征提取,獲得了目標的空間錐旋矢量、進動周期、自旋周期等特征參數;文獻[12]在多個雷達站距離像匹配的基礎上,重構了錐體彈頭各散射點的三維空間位置,并實現了錐體彈頭參數的估計;文獻[13]提出了一種有翼彈頭的進動參數提取方法。
與三維特征與運動參數相比,目標的三維圖像能夠提供更加直觀、更加豐富的目標信息。在文獻[11-12]的啟發下,本文將研究基于組網雷達的空間旋轉對稱進動目標的三維重構。組網雷達由空間分布配置的單一體制或混合體制的多部雷達組網而成,可以獲得目標更為全面和詳細的信息,因而近年來受到極大關注[14]。本文考慮利用分布式寬帶雷達組網,以獲得目標多角度的二維切片圖像,因為其中包含了目標的三維信息,因此有望通過信息的融合處理重構目標真實的三維結構。基于此本文首先建立了空間旋轉對稱進動目標的回波,研究了適用于空間進動目標的二維成像方法,在此基礎上利用組網雷達信息對空間旋轉對稱目標的三維重構方法進行了研究。
1 空間旋轉對稱進動目標回波建模
1.1進動模型
理論和實驗表明,在高頻區,目標總的電磁散射可以用等效散射點模型來近似[15]。對于如圖1所示的空間旋轉對稱錐體目標,其等效散射中心位于錐頂以及雷達視線與目標對稱軸所在平面與底部邊緣的交點處。其中XYZ為參考坐標系,xyz為目標本地坐標系,y軸為目標對稱軸,錐體以Y軸為進動軸作進動。
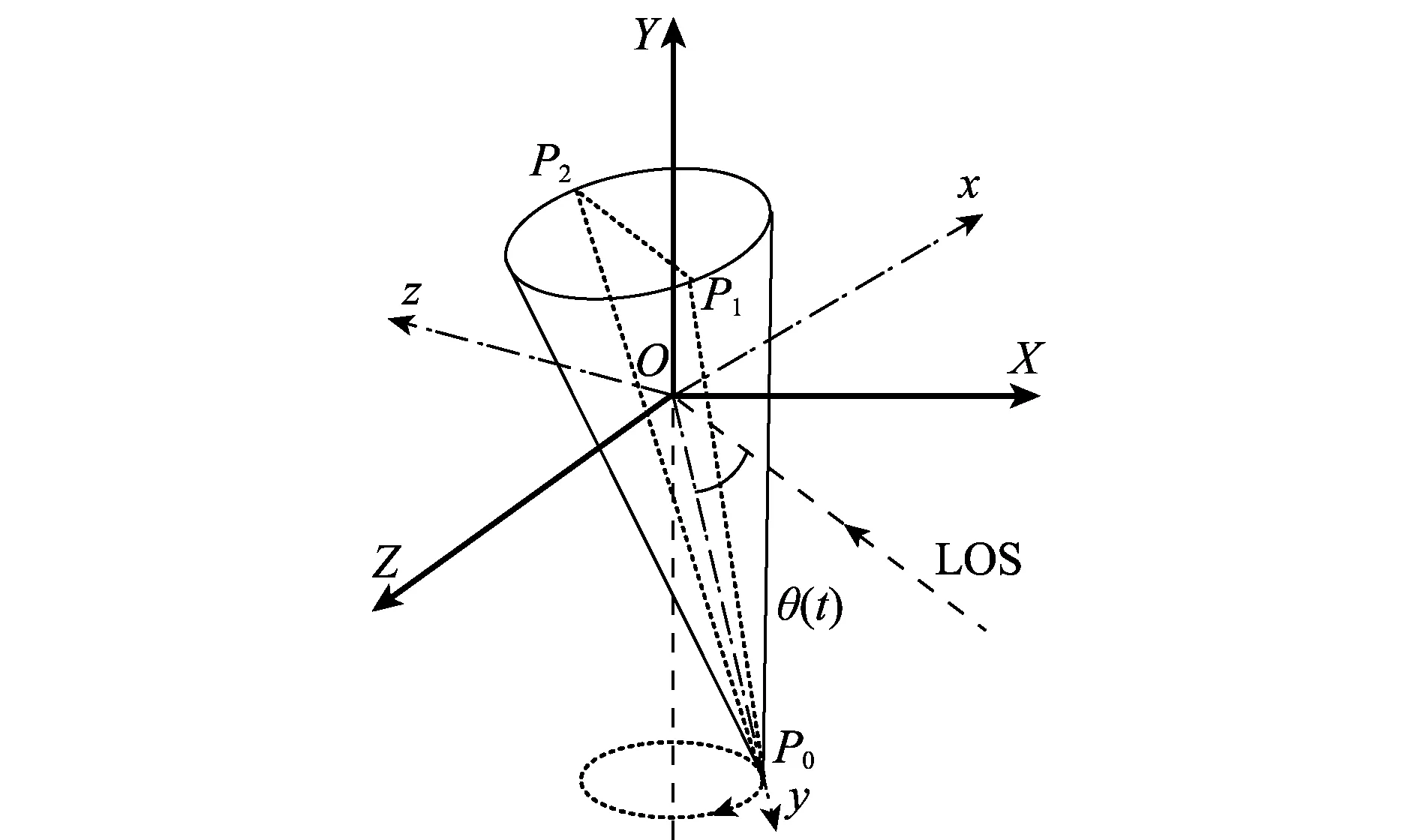
圖1 空間旋轉對稱錐體進動模型Fig.1 Model of spatial precession targets with rotational symmetry
對于錐頂散射點P0,設其在本地坐標系中的初始位置為lP0,則t時刻在參考坐標系中的位置可表示為
(1)
式中,Rinit為錐體的初始旋轉矩陣;Rconing為錐旋旋轉矩陣,由Rodrigues[16]公式
(2)
P1,P2為雷達視線(lineofsight,LOS)和對稱軸所在平面與錐體底面邊緣的交點,其運動規律與目標主體不一致,屬于非理想散射點。設錐體質心到底面的距離為d,底面半徑為a,則根據錐體底面非理想散射點與雷達視線、錐體結構的空間相對位置關系[16],其位置矢量可表示為
(3)

1.2回波模型
設雷達發射線性調頻信號:
(4)

目標回波信號可表示為
(5)
式中,ρ(x,y)和R(x,y;tm)分別為目標上(x,y)處散射點的散射強度和在tm時刻的徑向距離。
對回波解線頻調處理后,可得距離時間域信號:
(6)
式中,RΔ(x,y;tm)=R(x,y;tm)-Rref;Rref為參考信號參考距離。
2 進動目標的二維復數逆投影成像
2.1二維逆投影成像方法
由式(1)可知,錐頂散射點P0的運動規律為正弦形式,而非理想散射點P1,P2的運動規律與P0不同,除正弦形式外還包含其他高階調制項[7]。文獻[7]通過理論分析證明,當進動角較小時,高階項對散射點運動形式的調制作用很小,因此P1,P2的運動規律可近似為正弦形式。


圖2 三維進動的等效二維轉動示意圖Fig.2 Equivalent two-dimensional rotation of three-dimensional precession
對圖2中的二維轉動目標,有RΔ(x,y;tm)=xsinθ(tm)+ycosθ(tm),則
(7)
對以上二維轉動目標,可以利用復數逆投影算法進行二維成像。
(8)
2.2夾角估計方法
式(8)所示投影變換的關鍵是夾角θ(tm)的估計,下面給出一種基于分布式雷達組網的夾角估計方法。
步驟 1在非理想散射點正弦近似的條件下,可以利用文獻[12]方法實現不同雷達站之間散射點的匹配。
步驟 2利用文獻[7]的方法分別提取錐頂散射點微動曲線的幅度、均值和頻率,進而利用文獻[11]的方法解算目標進動軸單位方向矢量。
步驟 3初始位置矢量的解算。
設雷達視線方向單位矢量為nlos,則由式(1)可得,錐頂散射點在雷達視線方向的距離變化可表示為
(9)

(10)
式中,m,μ均可由步驟2得到。則單部雷達觀測可以獲得關于未知量的2個方程,所以理論上求解l0只需組網中2部雷達的數據,聯立以下方程組進行求解即可
(11)
步驟 4夾角估計。夾角θ(tm)可由下式求得
(12)
2.3夾角估計誤差分析
從成像過程看,估計的夾角不可避免地會存在誤差,從而對成像結果造成影響。下面對成像可承受的誤差范圍進行分析。
設目標只存在一個強散射點,即
估計的夾角為θ′(tm),則在點(x0,y0)處的投影值為
(13)
其中,Δr=x0(sinθ′(tm)-sinθ(tm))+y0(cosθ′(tm)-cosθ(tm)),令角誤差Δθ(tm)=θ′(tm)-θ(tm)(單位:rad),代入Δr,經整理后可得
(14)
當Δθ(tm)很小時,滿足cosΔθ(tm)≈1,sinΔθ(tm)≈Δθ(tm),此時
(15)
式中,L為目標在成像平面內的橫向最大距離。
由式(13)可知,要實現圖像在點(x0,y0)處的有效聚焦,包絡和相位[3]需分別滿足
(16)
進而可得角誤差需滿足的條件為
(17)
式中,ρr為雷達的距離分辨率;λ為雷達信號波長。
3 旋轉對稱目標的三維重構
對于旋轉對稱目標,單部雷達得到的僅是目標在雷達視線方向上的一個切片圖像,無法反映目標的三維結構。分布式雷達網中不同雷達獲取的二維圖像反映了目標在不同視角下的二維切片,原則上通過融合這些二維切片就有可能真實地重構目標的三維結構。
3.1二維圖像的空間定標
以上獲取的二維圖像實際是三維目標在雷達視線方向上的一個切面,要實現不同二維圖像在空間上的融合,首先需要確定二維切面在空間中的位置,即二維圖像的空間定標。
切面圖像由目標軸線方向和視線方向共同確定。設第i部雷達獲取的二維圖像為Ii,則Ii在三維空間中的位置可表示為(l0×nlos)·li=0,li為Ii上點的三維坐標。設Ii對應的目標空間三維圖像為Ji,則Ji(li)=Ii。
3.2二維圖像的空間配準與融合
因為在不同視角下,目標上非理想散射點的位置是變化的,而錐頂散射點的相對位置固定,因此這里以錐頂散射點為基準進行多幅二維圖像的配準和融合。
由進動目標二維成像過程可知,目標二維圖像的y′軸負方向與錐體對稱軸方向重合。因此對不同二維圖像進行空間配準時,只需進行空間位置的平移,而不需要進行姿態的調整。

3.3三維重構
對配準融合后的三維圖像J,檢測除錐頂散射點之外的局部強散射點,并記錄各散射點的三維坐標(xl,yl,zl)(l=1,…,m,m為檢測到的強點個數)。考慮到目標的旋轉對稱性,利用三維曲線圓對檢測到的散射點進行空間擬合,這樣目標的三維重構問題就轉化為非線性曲線的擬合問題。三維空間的曲線圓可以表示為
(18)
式中,(x0,y0,z0)為曲線圓心坐標;ρ曲線圓半徑;w為曲線圓所在平面的法向單位矢量。式(18)可以轉化為關于z的顯式形式z=F(A;x,y),其中A=(x0,y0,z0,ρ,w)為參數向量。
應用最小二乘擬合準則,以上三維曲線的擬合問題即等價為求解以下最優化問題
(19)
將取得最優解時的參數向量A帶回式(18),便得到錐體底面的重構結果。聯合錐頂散射點和錐體底面圓,即可唯一重構錐體目標的三維空間結構。
4 仿真實驗
仿真目標為一個進動錐體,長3m,底面半徑1m,進動頻率1Hz,進動角20°。目標回波產生采用動態電磁仿真的方法,首先用幾何繞射理論和物理光學法相結合的靜態電磁計算法[6]對錐體目標進行寬帶、全方位的雷達散射截面(radarcrosssection,RCS)計算,之后結合第1節的目標進動模型,對靜態RCS進行抽取,得到目標的動態電磁仿真回波。雷達網由3部雷達組成,在參考坐標系中的坐標分別為(-707,0,0)km、(-354,0,-612)km、(354,0,-612)km,目標坐標為(0,707,0)km。各雷達發射載頻不同的線性調頻信號,脈寬1μs,帶寬2GHz,脈沖重復頻率1 000Hz,假設各雷達同步對目標觀測1s。
圖3給出了第1部雷達經dechirp處理后的距離時間域信號。提取各部雷達距離曲線的特征,并聯合解算目標軸線的初始位置矢量,即可估計各部雷達視線與目標軸線的實時夾角。圖4給出了第1部理想情況下的雷達夾角估計結果。
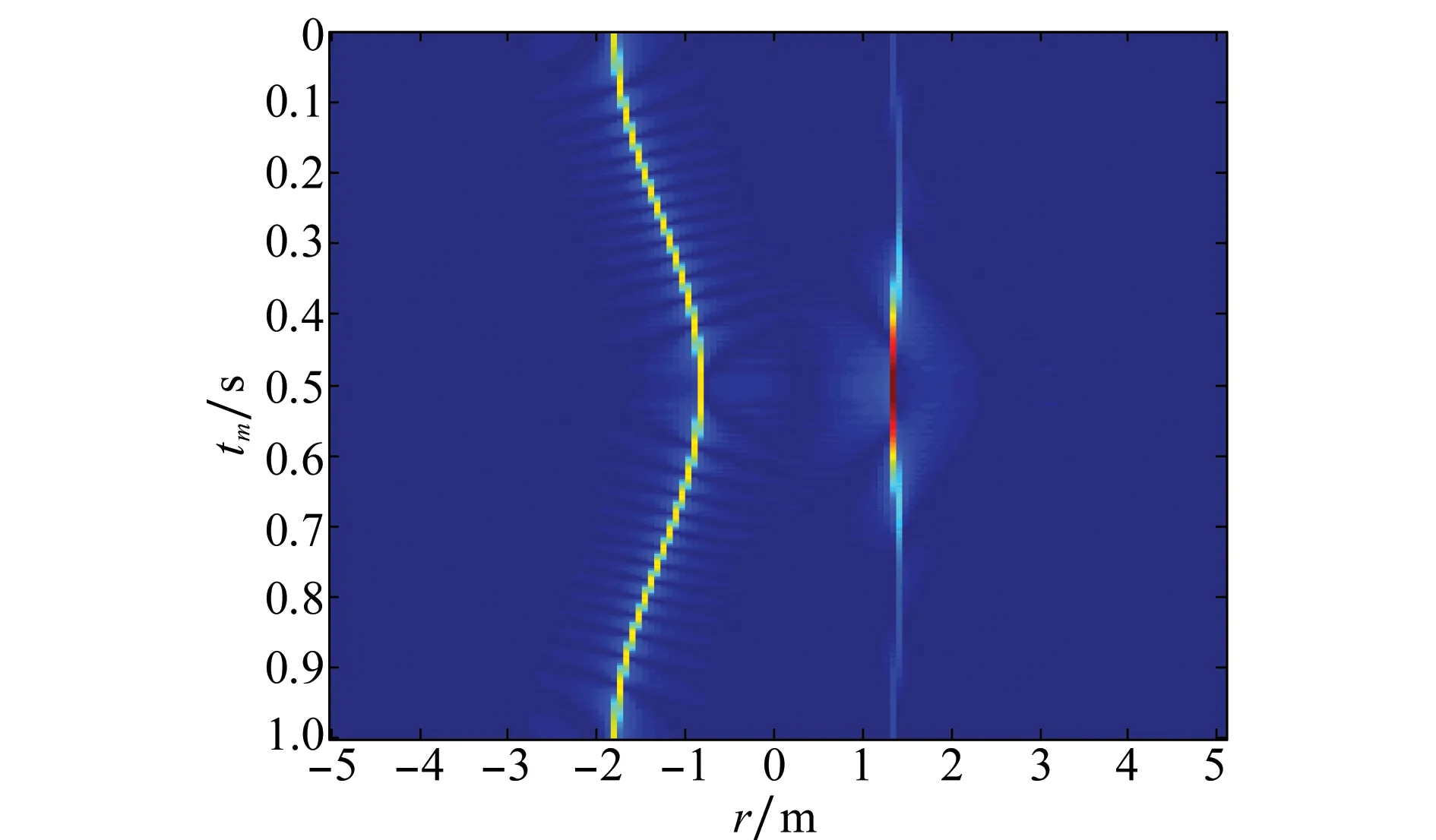
圖3 第1部雷達距離時間域信號Fig.3 Range profiles in radar 1
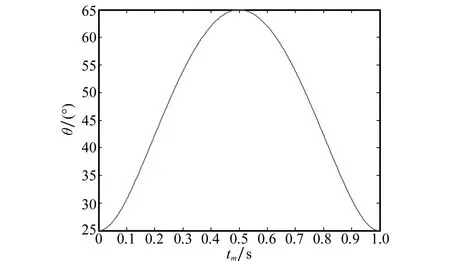
圖4 第1部雷達夾角估計值Fig.4 Estimated value of the angle in radar 1
在估計夾角的基礎上,利用復數逆投影算法對各部雷達回波進行二維成像。圖5為第1部雷達的二維成像結果。
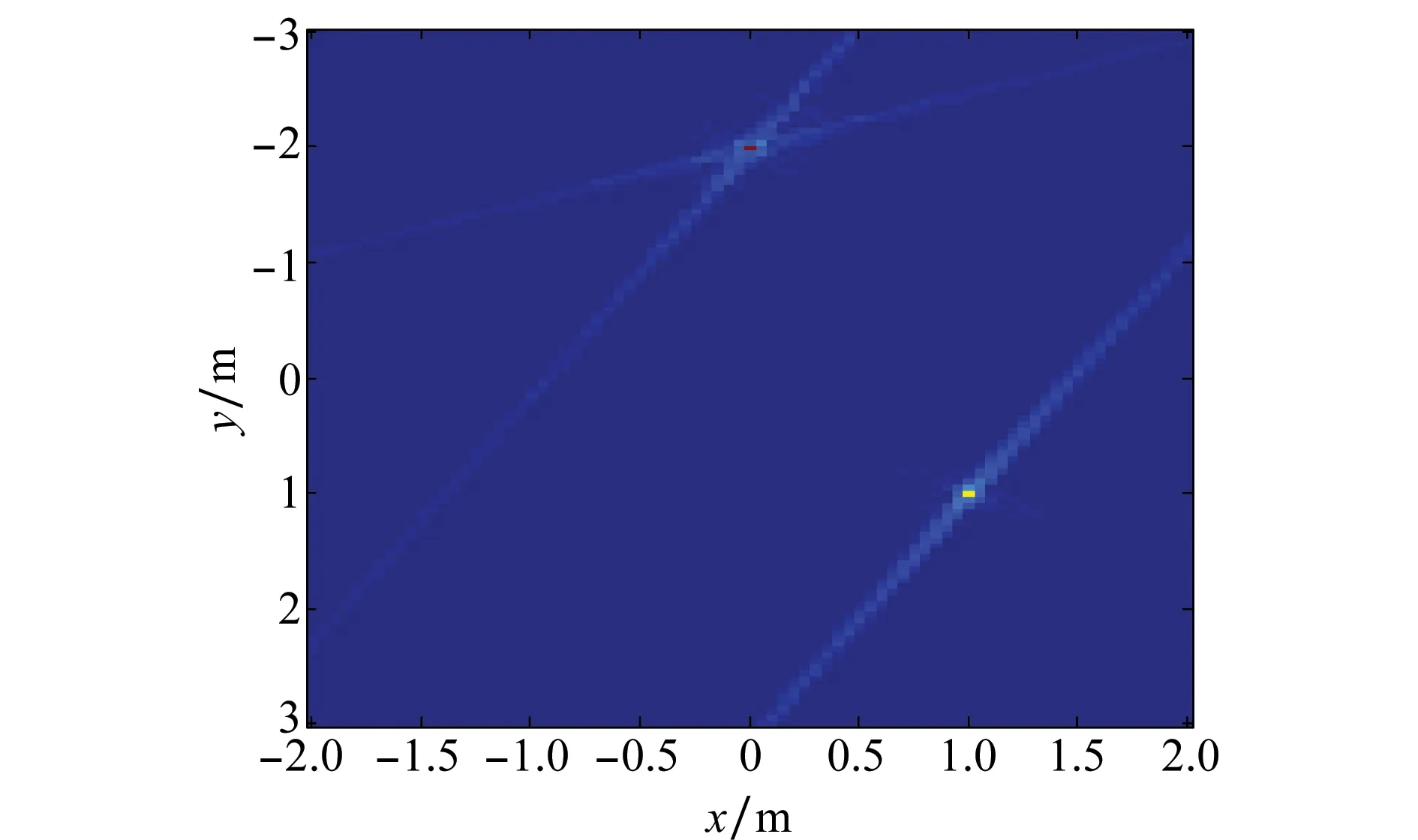
圖5 第1部雷達的二維成像結果Fig.5 Two dimensional imaging result in radar 1
考慮估計的夾角不可避免會有誤差,為分析其對成像的影響,在理想夾角基礎上加入方差為σ2的零均值高斯分布噪聲。由式(17)可計算出夾角誤差應滿足的范圍為Δθ(tm)<ΔΘ=0.003 75,圖6和圖7分別為σ=0.8ΔΘ和σ=2ΔΘ時,第1部雷達的成像結果。

圖6 σ=0.8ΔΘ時第1部雷達成像結果Fig.6 Imaging result in radar 1 with σ=0.8ΔΘ
由圖6和圖7可以看到當σ=0.8ΔΘ時,圖像質量下降不明顯;而當σ=2ΔΘ時,圖像中目標點會發嚴重散焦。因此,當噪聲方差小于ΔΘ2時,通常可保證較好的二維成像效果。
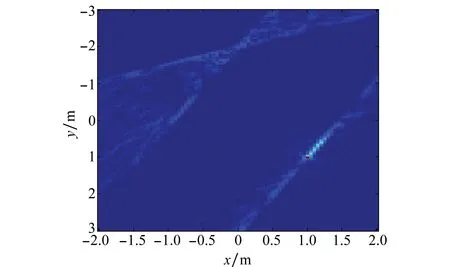
圖7 σ=2ΔΘ時第1部雷達成像結果Fig.7 Imaging result in radar 1 with σ=2ΔΘ
對各二維圖像進行空間定標、配準和融合后,可以得到目標在空間上的三維切面圖,如圖8所示。

圖8 錐體目標三維切面圖Fig.8 Three dimensional sections of cone targets
對以上三維圖像進行局部強散射點檢測,錐頂散射點的坐標為[0,-2,0],其余共3個強點,坐標分別為[1,1,0],[0.5,1,-0.866],[-0.5,1,-0.866],對后3個散射點利用式(19)的方法進行三維曲線擬合。此處考慮三維切面圖的特點,在參數向量A中w=[0,1,0]已知,因此三維曲線擬合可簡化為二維曲線擬合;結合各散射點坐標,利用最小二乘準則求解二維曲線擬合時的最優化問題,可得需擬合的曲線形式為x2+z2=1,y=1。圖9為檢測到的散射點位置及目標的三維重構結果。從圖9中看出重構結果與仿真目標外形結構一致,從而驗證了方法的有效性。

圖9 錐體目標三維重構結果Fig.9 Three dimensional reconstruction of cone targets
5 結束語
針對空間旋轉對稱目標三維重構問題,本文基于分布式寬帶雷達組網,研究了旋轉對稱進動目標的三維重構方法。分析和實驗證明只要夾角估計誤差滿足一定范圍,利用文中成像方法即可得到聚焦良好的二維圖像。該二維圖像空間意義較為明確,因此對多幅二維圖像做簡單的匹配融合處理后,即可真實重構目標的三維結構。本文工作可以解決單部雷達無法獲取旋轉對稱目標三維圖像的問題,對彈道中段目標成像識別以及高速微動目標三維重構都具有一定的理論和實際意義。對于空間非旋轉對稱進動目標的三維重構問題,因其在結構和運動形式上與旋轉對稱進動目標存在較大差異,故對此尚需作進一步地研究。
[1] Chen V C, Li F, Ho S S, et al. Micro-Doppler effect in radar: phenomenon, model, and simulation study[J].IEEETrans.onAerospaceandElectronicSystems, 2006, 42, (1):2-21.
[2] Ding X F, Fan M M, Wei X Z, et al. Narrowband imaging method for spatial precession cone-shaped targets[J].ScienceinChina:TechnologicalScience, 2010,53(4):742-949.
[3] Hu J M, Zhan R H, Niu W, et al. A novel imaging method for precession targets with rotational symmetry based on back projection transform[J].JournalofElectronics&InformationTechnology,2012,34(8):1847-1852.(胡杰民,占榮輝,牛威,等.基于后向投影變換的進動旋轉對稱目標成像新方法[J].電子與信息學報,2012,34(8):1847-1852.)
[4] Lei T, Liu J M, Li S, et al. A novel ISAR imaging method of ballistic midcourse targets based on MP sparse decomposition[J].SystemsEngineeringandElectronics, 2011, 33(12):2649-2654.(雷騰, 劉進忙, 李松, 等. 基于MP稀疏分解的彈道中段目標微動ISAR成像新方法[J].系統工程與電子技術,2011,33(12):2649-2654.)
[5] Pan X Y, Wang W, Liu J, et al. Modulation effect and inverse synthetic aperture radar imaging of rotationally symmetric ballistic targets with precession[J].IETRadar,SonarNavigation, 2013, 7(9):950-958.
[6] Bai X R, Bao Z. High-resolution 3D imaging of precession cone-shaped targets[J].IEEETrans.onAntennasPropagation, 2014, 62(8):4209-4219.
[7] Liang B S, Zhang Q, Lou H, et al. A method of three-dimensional imaging based on micro-motion feature association for spatial asymmetrical spinning targets[J].JournalofElectronics&InformationTechnology, 2014, 36(6):1381-1388.(梁必帥, 張群, 婁昊, 等. 基于微動特征關聯的空間非對稱自旋目標雷達三維成像方法[J].電子與信息學報, 2014, 36(6):1381-1388.)
[8] He S S, Zhao H N, Feng C Q, et al. Imaging for complex rotation target based on singular value decomposition[J].SystemsEngineeringandElectronics,2013,35(6):1119-1205.(賀思三,趙會寧,馮存前, 等. 基于奇異值分解的復雜轉動目標成像[J].系統工程與電子技術, 2013, 35(6):1119-1205.)
[9] Bai X R, Sun G C, Wu Q S, et al. Narrow-band radar imaging of spinning targets[J].ScienceinChina:InformationScience, 2011,54(4):873-883.
[10] Bai X R, Zhou F, Bao Z. High-resolution radar imaging of space targets based on HRRP series[J].IEEETrans.OnGeoscienceandRemoteSensing, 2014,52(5):2369-2381.
[11] Luo Y, Zhang Q, Yuan N, et al. Three-dimensional precession feature extraction of space targets[J].IEEETrans.onAerospaceandElectronicSystems, 2014,50(2):1313-1329.
[12] Lei T, Liu J M, Yang S C, et al. Study on feature extraction method of ballistic target based on three-station range profiles[J].JournalofAstronautics,2012,33(2):228-234.(雷騰,劉進忙,楊少春,等.基于三站一維距離像融合的彈道目標特征提取方法研究[J].宇航學報,2012,33(2):228-234.)
[13] Yao H Y, Sun W F, Ma X Y, et al. Precession feature extraction of warhead with empennages[J].ElectronicandLetters,2013, 49, (9):617-618.
[14] Subotic N S, Thelen B, Cooper K, et al. Distributed radar waveform design based on compressive sensing considerations[C]∥Proc.oftheIEEERadarConference, 2008. 1-6.
[15] Ma L, Liu J, Wang T, et al.Micro-Doppler characteristics of sliding-type scattering center on rotationally symmetric target[J].ScienceinChinaSeriesFInformationSciences, 2011,54(9):1957-1967.
[16] Yao H W, Wei X Z, Xu S K, et al. Micro-motion characteristics of non-ideal scattering centers of midcourse targets with precession[J].ActaElectronicaSinica,2012,40(9):1844-1851.(姚輝偉,魏璽章,徐少坤,等.彈道中段進動目標非理想散射中心微動特性研究[J].電子學報,2012,40(9):1844-1851.)
Three-dimensional reconstruction for spatial precession targets with rotational symmetry in radar networks
HU Xiao-wei, TONG Ning-ning, WANG Jian-ye, DING Shan-shan, ZHAO Xiao-ru
(Air and Missile Defense College, Air Force Engineering University, Xi’an 710051, China)
For the spatial precession targets with rotational symmetry,the image got in monostatic radar is only a section of targets in the line-of-sight (LOS), which cannot reflect the real 3-D structure. And the precession makes it more complex. Profited from the multi-view in radar networks, a 3-D reconstruction method for precession targets with rotational symmetry is proposed, based on radar networks. The echo model of precession targets with rotational symmetry is established firstly. On the basis of estimating the angle between LOS and the target’s symmetry axis, 2-D image of precession targets is got with complex-valued back projection, and the allowed angle error range is analyzed. Based on 2-D images from radar, a 3-D reconstruction method for targets with rotational symmetry is proposed, which realizes target’s 3-D reconstruction through 2-D images’ space calibration, matching fusion, strong scatter diction and circular curve fitting. Simulation results indicate that the method is valid.
radar networks; precession targets with rotational symmetry; complex-valued back projection; 3-D reconstruction
2015-12-22;
2016-02-04;網絡優先出版日期:2016-05-03。
國家自然科學基金(61372166, 61571459);陜西省自然科學基礎研究計劃項目(2014JM8308)資助課題
TN 957
A
10.3969/j.issn.1001-506X.2016.10.09
胡曉偉(1987-),男,博士研究生,主要研究方向為雷達目標成像與識別。
E-mail:601237134@qq.com
童寧寧(1963-),女,教授,博士,主要研究方向為雷達陣列信號處理。
E-mail:18092629021@189.com
王建業(1962-),男,教授,主要研究方向為電子科學與技術。
E-mail:17792630862@163.com
丁姍姍(1992-),女,碩士研究生,主要研究方向為雷達信號處理技術。
E-mail:dingshanshan001@hotmail.com
趙小茹(1993-),女,碩士研究生,主要研究方向為雷達信號處理技術。
E-mail: 17792630860@163.com
網絡優先出版地址:http://www.cnki.net/kcms/detail/11.2422.TN.20160503.1025.008.html
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56