紅外圖像末制導炸彈全彈道捕獲區域快速解算方法
2016-10-20 10:53:30謝曉方
彈道學報 2016年3期
關鍵詞:區域
龐 威,謝曉方
(海軍航空工程學院 兵器科學與技術系,山東 煙臺 264001)
?
紅外圖像末制導炸彈全彈道捕獲區域快速解算方法
龐威,謝曉方
(海軍航空工程學院 兵器科學與技術系,山東 煙臺 264001)
為實現紅外圖像末制導炸彈全彈道捕獲區域的快速計算,通過分析導引頭的瞬時捕獲域條件,以導引頭中軸線為中心,利用坐標變換建立了紅外圖像末制導炸彈的瞬時捕獲域模型;給出了不同視場角的瞬時捕獲域形狀,在此基礎上提出了紅外圖像末制導炸彈的全彈道捕獲區域快速計算方法。分析了全彈道捕獲域的過程,假設炸彈飛行過程中彈道傾角不變,分別給出了采用平臺型導引頭和捷聯型導引頭的紅外圖像末制導炸彈全彈道捕獲區域的快速計算方法。分別對采用追蹤制導律和大落角制導律的某型紅外圖像制導炸彈的全彈道捕獲區域進行了仿真分析,結果表明,提出的快速計算全彈道捕獲區域與仿真結果誤差較小,可用于紅外圖像末制導炸彈全彈道捕獲區域的快速計算。
紅外圖像制導炸彈;導引頭;瞬時捕獲域;全彈道捕獲域
新型遠程紅外圖像末制導炸彈是在普通航彈基礎上加裝被動式紅外成像導引頭,以實現防區外投放,并根據導引頭所成的紅外圖像來自動搜索、識別、捕獲和攻擊目標,其導引頭可分為平臺式和捷聯式。平臺式導引頭安裝在穩定的平臺上,隔離彈體運動對其產生的影響。捷聯式導引頭與彈體固連,通過坐標變換實現視線穩定跟蹤,降低了成本,提高了可靠性。新型遠程紅外圖像末制導炸彈可實現防區外投放,射程遠,打擊精度高,但由于戰場中目標的運動特性,需要較大的捕獲區域以確保對目標的精確捕獲。因此,研究制導炸彈的全彈道捕獲區域,對新型制導炸彈的指標論證具有重要意義。
相關文獻研究了不同類型導引頭的捕獲區域。文獻[1]以地面固定目標為例,利用導引頭光軸坐標系和導引頭平動坐標系之間的轉換關系,建立了激光半主動末端脈沖修正彈的探測區域模型,指出了影響捕獲區域的相關因素。文獻[2]利用相對性原理的思想建立了末端尋的制導反坦克導彈捷聯式導引頭的捕獲域模型,并分析了各種因素對捕獲域的影響,但只分析了平飛彈道的捕獲區域,沒考慮高度對捕獲區域的影響。文獻[3]建立了風標彈和比例彈有風和無風時的捕獲區域模型,并采用等效視場方法分析了2種彈的捕獲概率,結果表明兩者捕獲域近似相同。文獻[4]通過建立導引頭地面捕獲區域,以理想彈道作為名義捕獲區域中心,根據其與真實目標位置的相對差來修正射表投彈的距離,并研究了駕駛儀過載和攻角對導引頭捕獲目標概率的影響。文獻[5]建立了激光末制導炮彈的瞬時捕獲區域,分析了瞬時捕獲域的邊界隨炮彈運動的關系,求解了全彈道捕獲區域,并對影響捕獲域的各種因素進行了仿真分析。
以上文獻研究的均是激光或者雷達制導導引頭,針對紅外圖像末制導導引頭的全彈道捕獲區域研究較少。與激光或雷達導引頭在地海平面的瞬時捕獲區域為橢圓不同,某新型紅外導引頭采用凝視焦面陣成像技術,在地海平面的瞬時捕獲區域為梯形[6]。因此,本文以某新型遠程紅外圖像末制導炸彈為應用背景,以坐標變換關系為基礎,建立了導引頭視場角的瞬時捕獲域模型;以此為基礎,假設彈道傾角不變,建立了不同類型導引頭的全彈道捕獲區域快速解算模型,并進行了仿真實驗。
1 瞬時捕獲區域的建模
1.1相關坐標系以及轉換關系
涉及到的坐標系主要有2個:導引頭中軸坐標系和目標點所在的水平面坐標系,如圖1所示。
圖1 導引頭中軸坐標系與目標點所在水平面坐標系的關系
①導引頭中軸坐標系的定義。以導引頭的中心點為原點O,Oxg軸指向導引頭中軸方向,沿導引頭前方為正;Oyg軸在炸彈運動縱向平面內與Oxg軸相互垂直,指向上方為正;根據右手坐標系規則確定Ozg軸。
②目標點所在水平面坐標系的定義。以目標所在位置為原點O,Oxt軸在目標運動的橫向平面內,向右為正;Oyt軸在目標運動的縱向平面內與Oxt軸相互垂直,指向上方為正;根據右手坐標系規則確定Ozt軸。
導引頭的俯視角φg,z:導引頭的中軸與Oxtzt平面所成的夾角,規定俯視角φg,z的正方向為導引頭中軸指向Oxtzt平面上方,反之則為負。

根據上述2個坐標系的定義,可通過導引頭的俯視角φg,z和側視角φg,y來確定兩者之間的轉換關系,其轉換矩陣為
I(φg,z,φg,y)=
(1)
則炸彈在Oxtytzt坐標系中的位置為
(xgygzg)T=I(φg,z,φg,y)(xtytzt)T
(2)
1.2導引頭的瞬時捕獲區域
紅外圖像末制導炸彈在彈道末段搜索、探測、識別和捕獲目標,為研究方便,不考慮目標搜索、探測和捕獲的時間,則導引頭在水平面內的瞬時捕獲區域如圖2所示。假設導引頭中軸即為導引頭的光軸,且在解鎖前與炸彈彈體縱軸方向重合,導引頭的縱向視場角(縱向平面內導引頭中軸和最大視場之間的夾角)為ψa,橫向視場角(橫向平面內導引頭中軸和最大視場之間的夾角)為ψb,彈道傾角為q,攻角為α,炸彈距離水平面的高度為h。由圖2所示的幾何關系可知,以導引頭啟控點為頂點,形成的錐體與目標所在水平面相交所形成的區域為梯形。同時,以導引頭啟控點為球心,以導引頭的作用距離R為半徑的球與目標所在的水平面相交所成的區域為圓,本文稱之為作用圓;梯形與作用圓相交的區域即為導引頭的瞬時捕獲區域。由于炸彈所處的高度和導引頭的視場角不同,瞬時捕獲區域可能為整個梯形或部分梯形與作用圓共同圍成的區域[7-8]。顯然,導引頭的瞬時捕獲區域與導引頭的視場角(縱向和橫向視場角)、導引頭的作用距離、炸彈的高度、彈體姿態角(攻角、側滑角和彈道傾角)等因素有關。其中,紅外圖像導引頭的有效作用距離又和大氣溫度、顆粒散射以及導引頭的靈敏度等因素有關。
圖2 導引頭的瞬時捕獲區域示意圖
從圖2中可得出:梯形的高為TaTb,與導引頭的縱向視場角相關,E和F為導引頭橫向方向與地面作用圓之間的交點,與導引頭的橫向視場角相關。若炸彈的彈道傾角和攻角固定,那么導引頭的瞬時捕獲區域與炸彈的高度和導引頭的視場角正相關,且縱向視場角越大,梯形的高度就越大,導引頭捕獲預裝定目標點的近區和遠區的能力也就越強;炸彈的瞬時飛行高度越高,導引頭瞬時捕獲預裝定目標點的遠區能力就越強,捕獲預裝定目標點近區的能力就越弱。同理,當炸彈飛行高度和攻角保持不變時,彈道傾角越大,錐體與水平面中目標點的作用圓重合區域越大,捕獲預裝定目標的能力就越強,反之,捕獲預裝定目標的能力就越弱。捕獲預裝定目標能力隨攻角的變化情況與彈道傾角的情況相反。
當炸彈高度低于一定的高度后,其瞬時捕獲區域隨著高度的降低將減小。當彈目距離較近時,由于其瞬時捕獲區域被在高處的瞬時捕獲區域所覆蓋,因此設定當高度低于某一特定值后捕獲結束。
1.3導引頭瞬時捕獲區域的建模
在紅外圖像末制導炸彈攻擊目標的過程中,導引頭的瞬時捕獲區域為瞬時視場在目標所在水平面的瞬時投影[9]。在導引頭中軸坐標系下的瞬時捕獲區域應滿足:彈目的最大距離應小于導引頭的捕獲距離;彈目之間的視線角應小于導引頭視場角的約束[3]。與激光制導炸彈的瞬時捕獲域不同,紅外圖像末制導炸彈的視場角分為縱向視場角和橫向視場角。在導引頭中軸坐標系下的捕獲區域的邊界需滿足以下方程:
(3)
式中:ψa,ψb分別為導引頭的縱向和橫向視場角。
設炸彈在目標點水平面坐標系的坐標為M(xm,ym,zm),目標點的坐標為T(xt,yt,zt),根據坐標轉換關系,則線段MT在導引頭中軸坐標系中的位置為
(4)
將式(2)、式(3)帶入式(4)中,可得在目標點所在的水平面坐標系下的瞬時捕獲區域:
(5)
為分析問題方便,不妨設炸彈在縱向平面內運動,目標位于水平面內,即有:ym=h,zm=0,yt=0,φg,y=0;方程(5)可化簡為
(6)
式(6)中第3式表示的即為作用圓。從式(6)中可以看出,導引頭的瞬時捕獲區域為4條直線圍成的區域與作用圓相交重合的區域。根據φg,z,ψa,ψb的取值,可將圍成的區域分為以下幾種情況。
①φg,z>ψb且φg,z>ψa時,導引頭的瞬時捕獲區域為一梯形與圓相交的區域,即梯形位于圓中的區域,如圖3(a)所示。
②ψb>φg,z且φg,z>ψa時,導引頭的瞬時捕獲域為梯形左側邊與圓圍成的右側區域,即圓中位于梯形內的部分,如圖3(b)所示。
③ψa>φg,z且ψb>φg,z時,導引頭的瞬時捕獲域與情況②相同,只是導引頭視場在地面的投影是梯形去除了底邊,如圖3(c)所示;其他情況類似。
圖3 3種類型的瞬時捕獲區域
在實際應用過程中,導引頭誤差角通常小于彈道傾角,本文以第①種情況為例,研究炸彈導引頭的全彈道捕獲區域,其他情況也可采用類似的方法處理。
2 全彈道捕獲區域
2.1全彈道捕獲區域分析
紅外圖像末制導炸彈的全彈道捕獲區域是指末制導炸彈在攻擊目標的過程中能夠對目標所在水平面進行捕獲的所有分布區域,該過程從攻擊預裝定目標位置的信息時刻開始,到接收到目標信息但無法繼續進行導引的時刻結束[5]。
某一時刻的瞬時捕獲區域情況有3種:①炸彈位置較高,導引頭作用距離較短,以炸彈所在位置為球心,以導引頭的作用距離為半徑的球與目標所在的平面不相交,此種情況的捕獲域為零。②圖3(a)中情況在搜索過程中較為常見,隨著彈目距離的不斷減小,以導引頭為球心、作用距離為半徑的球與水平面相交的區域不斷增大,導引頭在目標所在平面的瞬時捕獲域的完整性也不斷加大,之后覆蓋整個導引頭的捕獲域。③當炸彈飛行高度較低時,導引頭在地面的瞬時捕獲區域隨著飛行高度的降低不斷減小,同時投影區域逐漸進入以導引頭為球心、作用距離為半徑的球與水平面相交的作用圓內。其捕獲過程如圖4所示。
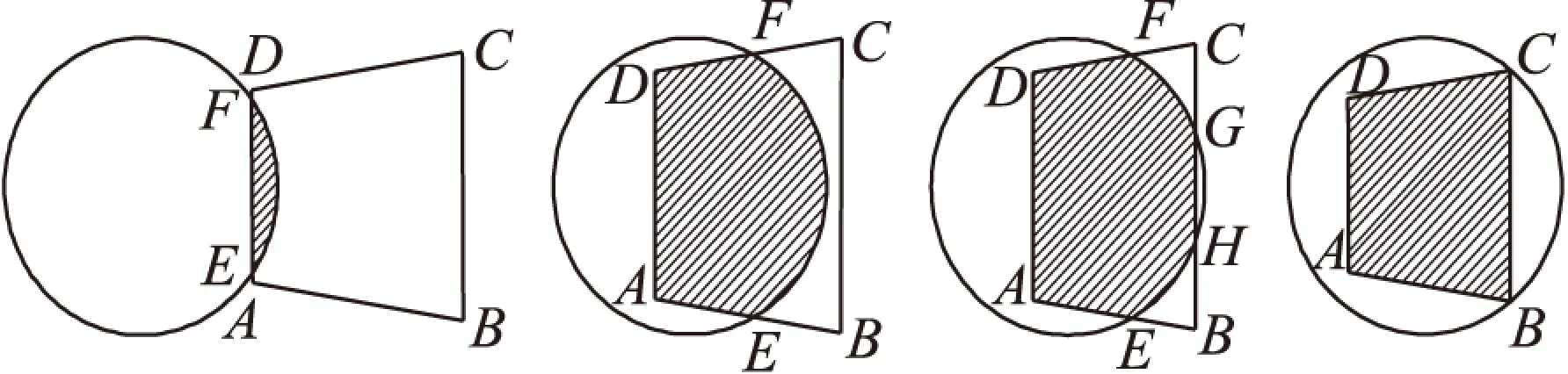
圖4 導引頭的捕獲過程
已知某新型遠程紅外末制導炸彈采用SINS/BD(Beidou,BD)中制導+紅外圖像末制導方式,分別研究采用平臺導引頭和捷聯導引頭的全彈道捕獲區域,進而確定采用末制導導引頭的類型。
2.2平臺式導引頭的全彈道捕獲區域
對于采用平臺式導引頭的紅外圖像末制導炸彈,在中制導捕獲目標之前,炸彈彈體速度方向指向預裝定的位置。在捕獲目標之前,保持炸彈飛行速度方向基本不變,不考慮彈體的滾轉和側滑運動。因此,對于采用此種導引頭的紅外圖像末制導炸彈,在中制導時,通過調整導引頭的框架角指令可使導引頭的中軸始終指向射前預裝定目標的位置。此時炸彈的彈道傾角q等于導引頭的俯視角,即q=φg,z。
由上述分析知,炸彈飛行捕獲過程中的彈道傾角保持不變,則
h=xmtanq
(7)
根據式(6)中第2式和第3式聯立求解出梯形與作用圓的交點坐標:
(8)
式中:
將式(7)帶入到式(8)中,消去xm,可得:
(9)
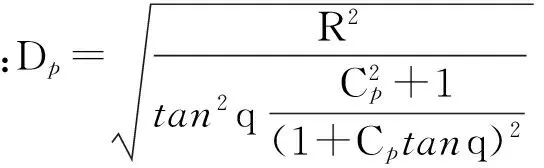
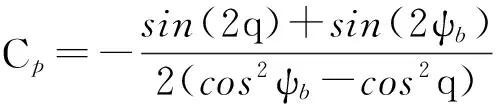
式(9)為以導引頭有效作用距離R為長半軸,Dp為短半軸的橢圓,記為SE。
同理,將式(6)中第1式和第3式聯立求解,得到梯形的2條腰與作用圓的交點的軌跡方程:
(10)

所以式(10)表達的是長半軸為Ep,短半軸為Fp的橢圓,記為PE。
則采用平臺導引頭的制導炸彈全彈道捕獲區域是以目標點為中心,式(9)和式(10)的2個橢圓相互重合圍成的區域。
2.3捷聯導引頭的全彈道捕獲區域
當某新型紅外圖像末制導炸彈采用捷聯導引頭時,捕獲預裝定目標前導引頭與彈體固連,導引頭中軸方向與炸彈彈體縱軸方向相同,則炸彈的俯仰角與導引頭視線角相等。因此,在炸彈飛行的縱向平面內有:
φg,z=q+α
(11)
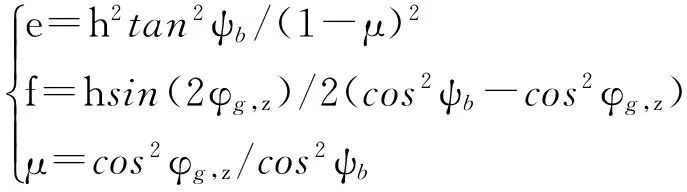
式中:α為攻角。攻角的產生導致其捕獲區域不再關于預裝定目標點對稱,因此根據式(8)和式(6)中第2式可得捷聯導引頭的全彈道捕獲區域:
(12)
式中:
以及,
(13)
式中:
為下文表示方便,記式(12)和式(13)分別為橢圓SE1和SE2。
同理,將式(6)中第1式和第3式聯立求解,得出梯形的兩條腰與作用圓的交點的軌跡方程:
Ds1x2+Es1xz+Fs1z2-Gs1=0
(14)
式中:
根據文獻[10],令
顯然,I1>0;且
tan2α+cos2φg,z+2sinφg,zcosφg,ztanq+sin2φg,ztan2q]
顯然,I2>0,I1I3<0;故式(13)表示的是橢圓。
Ds2x2+Es2xz+Fs2z2-Gs2=0
(15)
式中:
同理可證式(15)表示的也為橢圓。

捷聯導引頭的全彈道捕獲區域為橢圓SE3和橢圓SE1所圍成的公共區域加橢圓SE3和橢圓SE2圍成的公共區域。
3 捕獲區域的仿真計算
根據文獻[11],某新型遠程紅外圖像末制導炸彈的投放條件如下:載機的投放高度為10km,彈目初始距離60km,載機速度為250m/s(載機速度與炸彈的初始速度相同),載機的速度方向為0°(載機速度方向為炸彈的初始彈道傾角),紅外圖像導引頭的有效作用距離為4km,縱向和橫向視場角分別為15°和20°,炸彈的平衡攻角為-3°~+3°。載機投放炸彈后,炸彈展開彈翼滑翔飛行,采用“SINS/BD中制導機動+紅外圖像末制導”方案攻擊目標,根據預裝定的目標點坐標,采用追蹤制導律引導炸彈飛向目標。當導彈到達導引頭的啟控點后轉入末制導段。為提高捕獲目標的概率,設定炸彈速度方向始終對準預裝定目標點位置。
仿真中取末制導段彈道傾角為-30°,彈目距離為6km,采用Runge-Kutta法實時求解仿真彈道。
3.1末制導全彈道捕獲區域仿真
圖5、圖6和表1分別表示某新型遠程紅外圖像制導炸彈采用平臺式導引頭和捷聯導引頭全彈道捕獲區域的快速計算理論結果和仿真結果;圖5(b)和圖6(b)是將重合區域放大的結果。表1中,c為橫向捕獲區域,ec為估計誤差。
圖5 平臺式導引頭全彈道捕獲區域仿真
圖6 捷聯導引頭捕獲區域仿真
從表1中可以看出,平臺式導引頭和捷聯導引頭側向捕獲區域的理論值和仿真值的誤差ec分別為0.051%和0.21%,這是由于側向捕獲區域的最大值只與導引頭的作用距離和橫向視場角有關,與飛行彈道傾角無關。同時,炸彈攻角的變化導致捷聯導引頭的側向捕獲誤差大于平臺式導引頭的側向捕獲誤差。
表1 橫向捕獲區域對比表
表2和表3給出了同等條件下平臺式導引頭和捷聯導引頭的縱向全彈道捕獲區域的最大值、最小值和誤差值,表中,lmax為縱向捕獲區域的最大值,lmin為縱向捕獲區域最小值,elmax,elmin為相應的估計誤差。從表1、表2和表3中可以看出,文中的快速計算結果與仿真結果誤差較小。
表2 縱向捕獲區域最大值對比表
表3 縱向捕獲區域最小值對比表
3.2大落角全彈道捕獲域的仿真
為保證對目標的毀傷效果,遠程紅外圖像末制導炸彈通常需要較大的落角以滿足對目標的侵徹效果[12-13]。因此在彈道末端一般采用大落角末制導律,捷聯導引頭只能通過調整彈道傾角實現其大落角,對于平臺式導引頭則可通過調整框架角指令始終使導引頭中軸對準目標。
顯然,采用大落角末制導律時,由于炸彈飛行過程中彈道傾角的變化,不可采用第2節的公式計算炸彈的全彈道捕獲區域,但可以通過這些公式來估計捕獲區域的大致區域,可將捕獲過程分成兩部分。第一部分在炸彈捕獲到目標前,按照等彈道傾角飛行,當捕獲到目標時,根據3.1節分析知此時導引頭的捕獲區域的側向最大。第二部分為導引頭捕獲到目標后,炸彈按照大落角末制導律飛行,此時,炸彈傾角的變化規律可選擇為[14]
(16)
式中:q為炸彈的彈道傾角,qm,s為炸彈捕獲到目標前的彈道傾角,D為彈目距離,Dm,s為炸彈恰好捕獲到目標時彈目距離,qf為炸彈的最終落角。
圖7和圖8給出了落角分別為-70°和-90°時的全彈道捕獲區域的理論值和仿真值,表4和表5給出了不同落角下縱向捕獲區域的最大值和最小值。從圖和表中可以看出,理論計算結果和仿真結果誤差較小,因此可采用本文提出的方法對炸彈的全彈道捕獲區域進行估算。
圖7 -70°落角時的捕獲區域
圖8 -90°落角時的捕獲區域
qf/(°)lmin/m理論值仿真值elmin/%-90-2397-23262.96-80-2397-23302.80-70-2397-23312.75-60-2397-23253.00
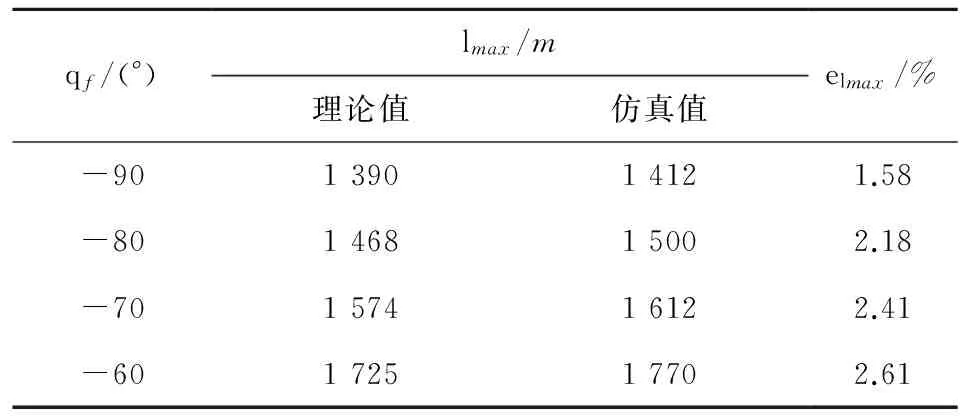
表5 不同落角時縱向捕獲區域理論最大值和仿真最大值對比
4 結論
①導引頭的全彈道捕獲區域與炸彈的飛行高度無關。紅外圖像末制導導引頭的全彈道捕獲區域只與導引頭的作用距離、縱向和橫向視場角以及炸彈飛行過程中的彈道傾角有關,其中捷聯導引頭的捕獲區域還與飛行攻角有關。導引頭的縱向捕獲區域只與導引頭的作用距離和彈道傾角、縱向視場角成正比;橫向捕獲區域只與導引頭的作用距離和橫向視場角成正比,與彈道傾角和攻角無關。
②相同條件下,平臺式導引頭和捷聯式導引頭的橫向捕獲最大區域基本相同,由于攻角的影響,縱向捕獲區域中捷聯導引頭相對于平臺式導引頭前移一段距離。
需要指出的是,雖然全彈道捕獲區域與炸彈高度無關,但投放初始高度應大于導引頭的作用距離,否則可能會導致捕獲區域的初始值大于零,以至于全彈道捕獲區域的理論值和仿真值產生較大誤差。同時,全彈道捕獲區域是一個靜態的概念,捕獲前采用彈道傾角不變的假設,對于時敏目標,不僅要考慮時間的約束,還要考慮目標所處的位置。因此,時敏目標的捕獲區域還有待于進一步的研究。
[1]楊榮軍,王良明,曹小兵,等.末段脈沖修正彈攻擊區研究[J].彈箭與制導學報,2009,29(6):162-164.
YANG Rong-jun,WANG Liang-ming,CAO Xiao-bing,et al.Study on attack area for terminal correction projectile with impulse thruster control[J].Journal of Projectiles,Rockets,Missiles and Guidance,2009,29(6):162-164.(in Chinese)
[2]張西興,譚亞莉,李小海.末段尋的制導的反坦克導彈捕獲域研究[J].彈箭與制導學報,2003,24(4):25-26.
ZHANG Xi-xing,TAN Ya-li,LI Xiao-hai.A research on capture field for the terminal homing antitank missile[J].Journal of Projectiles,Rockets,Missiles and Guidance,2003,24(4):25-26.(in Chinese)
[3]夏群力,劉軼英,楊桂清.采用不同導引頭的激光制導航彈捕獲概率對比分析[J].系統仿真學報,2008,20(13):3 397-3 400.
XIA Qun-li,LIU Yi-ying,YANG Gui-ging.Comparison study of target acquisition probability between two types of laser guided bombs with different seekers[J].Journal of System Simulation,2008,20(13):3 397-3 400.(in Chinese)
[4]溫求遒,崔瑩瑩,夏群利,等.基于導引頭地面捕獲域的激光制導炸彈射表修正技術[J].紅外與激光工程,2012,41(8):2 053-2 057.
WEN Qiu-qiu,CUI Ying-ying,XIA Qun-li,et al.Firing table modifying based on acquisition ground zone of seeker for laser guidance bomb[J].Infrared and Laser Engineering,2012,41(8):2 053-2 057.(in Chinese)
[5]趙成旺,宋衛東,何偉.某型末制導炮彈全彈道捕獲域研究[J].彈道學報,2013,25(2):54-58.
ZHAO Cheng-wang,SONG Wei-dong,HE Wei.Research on total capture area of terminal guidance projectile[J].Journal of Ballistics,2013,25(2):54-58.(in Chinese)
[6]張淵.艦載紅外搜索跟蹤系統的新體制研究[J].紅外與激光工程,2009,38(4):583-588.
ZHANG Yuan.New scheme of ship-borne IRSTS[J].Infrared and Laser Engineering,2009,38(4):583-588.(in Chinese)
[7]楊桂清,夏群力,王林平.激光比例制導航彈對目標的捕獲概率分析[J].彈箭與制導學報,2006,26(2):20-22.
YANG Gui-qing,XIA Qun-li,WANG Lin-ping.Study of target acquisition probability for laser-guided bombs with proportional navigation guidance law[J].Journal of Projectiles,Rockets,Missiles and Guidance,2006,26(2):20-22.(in Chinese)
[8]林德福,牟宇,常超,等.激光半主動末制導炮彈捕獲概率研究[J].北京理工大學學報,2010,30(6):698-701,706.
LIN De-fu,MOU Yu,CHANG Chao,et al.A study of target acquisition probability for laser semi-active terminal guided projectile[J].Transactions of Beijing Institute of Technology,2010,30(6):698-701,706.(in Chinese)
[9]李興隆,于紀言,姚文進,等.基于末段修正迫彈命中概率的射角優化[J].彈道學報,2014,26(2):90-94.
LI Xing-long,YU Ji-yan,YAO Wen-jin,et al.Optimization of launching angle based on hit probability for terminal correction mortar projectile[J].Journal of Ballistics,2014,26(2):90-94.(in Chinese)
[10]沈永歡,葉其孝.實用數學手冊[M].北京:科學出版社,2006.
SHEN Yong-huan,YE Qi-xiao.Practical methematics handbook[M].Beijing:Science Press,2006.(in Chinese)
[11]袁宴波,張科,薛曉東.基于Radau偽譜法的制導炸彈最優滑翔彈道研究[J].兵工學報,2014,35(8):1 179-1 186.
YUAN Yan-bo,ZHANG Ke,XUE Xiao-dong.Optimization of glide trajectory of guided bombs using a Radau pseudo-spectral method[J].Acta Armamentarii,2014,35(8):1 179-1 186.(in Chinese)
[12]ZHANG You-an,MA Guo-xin,LIU Ai-li.Guidance law with impact time and impact angle constraints[J].Chinese Journal of Aeronautics,2013,26(4):960-966.
[13]TAUB I,SHIMA T.Intercept angle missile guidance under time varying acceleration bounds[J].Journal of Guidance,Control,and Dynamics,2013,36(3):686-699.
[14]竇磊,楊新民.大著地角衛星制導炸彈最優制導律研究[J].南京理工大學學報,2010,34(3):314-318.
DOU Lei,YANG Xin-ming.Optimal guidance law of satellite guided bombs with large landing angle[J].Journal of Nanjing University of Science and Technology,2010,34(3):314-318.(in Chinese)
Rapid Calculation Method for Total Capture Area of Infrared-image Terminal Guided Bomb
PANG Wei,XIE Xiao-fang
(Department of Ordance Science and Technology,Naval Aeronautical and Astrounautical University,Yantai 264001,China)
To rapidly calculate the total capture area of infrared-image terminal guided bomb(TGB),the condition of the instant capture area was analyzed,and the middle axis of the seeker was taken as center,and the instant capture area model was established by using coordinate transformation.The shape of instant capture area in different field of view was given.On this basis,the rapid calculation method of total capture area of infrared-image TGB was proposed.Under the assumption of the flight path angle keeping constant,the total capture area of the guided bomb with the gimbaled seeker and the strap-down seeker were put forward respectively.The total capture area for the infrared image TGB guided by tracking method and the large angle of fall guidance law was simulated,respectively.The results show that the total capture area by the rapid calculation is in agreement with the simulation result,and the rapid calculation can be used for the fast calculation of the total capture area of infrared-image TGB.
infrared-image guided bomb;seeker;instant capture area;total capture area
2016-05-23
龐威(1987- ),男,博士研究生,研究方向為武器系統建模與仿真。E-mail:metrix_yt@163.com。
謝曉方(1962- ),男,教授,博士生導師,研究方向為火力控制、紅外技術。E-mail:xiexf106@yahoo.com.cn。
TJ414
A
1004-499X(2016)03-0035-08
猜你喜歡
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
科學(2020年5期)2020-11-26 08:19:22
軟件(2020年3期)2020-04-20 01:45:18
商周刊(2018年15期)2018-07-27 01:41:20
敦煌學輯刊(2018年1期)2018-07-09 05:46:42
北京教育·普教版(2017年1期)2017-02-05 13:26:23
新疆農墾科技(2016年2期)2016-08-21 13:50:16
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
新疆財經大學學報(2015年3期)2015-12-10 03:49:15