基于神經網絡預測控制的污水處理控制器
2016-10-26 03:10:19劉玉章
科學中國人 2016年26期
劉玉章
石家莊技師學院
基于神經網絡預測控制的污水處理控制器
劉玉章
石家莊技師學院
針對污水處理過程中采用傳統的流量程序控制和時間程序控制的不足,該文設計了一種基于神經網絡預測控制的溶解氧(DO)濃度控制器。文中詳細介紹了該控制器的模型、結構、滾動優化方法和主要算法;在此基礎上,設計了由AT89C52單片機實現神經網絡預測控制器的硬件結構圖。實地應用表明:該控制方法可使曝氣池的DO波動范圍較小,抗干擾能力較強,具有較好的魯棒性,特別適合于慢時變的非線性控制系統。
污水處理;神經網絡;預測控制;溶解氧DO;非線性系統
目前城市污水處理系統有相當一部分是采用單輸入多輸出的動態系統,該系統的特點是:以微生物處理作為主要手段,要求要達到具有脫磷除氮、水的質量要達到國家標準,運行費用低廉等目標。考慮到排送到污水處理廠的廢水無論是在水量上、還是在水質上都具有隨機變化的特點,因此很難使用傳統的經典線性控制理論來進行控制,由于神經網絡預測控制對解決非線性問題和復雜系統的控制有著特殊的優勢[1],本文就神經網絡預測控制在污水處理系統中的應用做一探討。
一、活性污泥法污水處理過程
1.污水處理主要過程
活性污泥法處理工藝是大多數污水處理廠常采用的一種方法,主要工藝過程為:流入到污水處理廠的污水首先送入第一沉池去掉漂在水面上的懸浮物,接著送入主處理池---曝氣池,為使微生物在曝氣池中充分作用,同時將第二沉池中部分活性污泥也回流給曝氣池已形成一定濃度的混合液,經吹入氧氣(空氣),并經攪拌使活性污泥與污水充分混合,以得到足夠濃度的溶解氧DO(dissolved oxygen),使存活在活性污泥上的微生物分解,污水得到凈化,從二沉池中流出;同時在二沉池內沉淀下來的污泥的大部分再被送回到曝氣池,只有少部分污泥被排放掉[2]。如圖1所示。
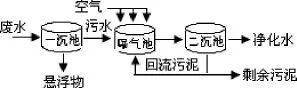
圖1 活性污泥法污水處理流程框圖
2.活性污泥控制法與傳統控制法比較
傳統控制法主要是它以固定流量和固定時間作為控制參數,實施固定流量程序控制和時間程序控制,而在實際中由于污水水量、污水濃度都是變量,因此容易造成出水口水質不合格的現象,而采用活性控制法是通過對污水水量、污水濃度及活性污泥的實時變化進行檢測,找到一個最佳比例進行控制,因此能達到最佳控制效果。
二、神經網絡預測控制器設計
1.預測控制器結構
所謂預測控制系統是指依據前一時刻和當前時刻的系統輸入輸出信息,預測下一時刻的輸出值。并將下一時刻的預測值與當前值的誤差作為反饋信號,再與標準輸入值進行比較,經優化以求取最佳控制規律,來作為系統的控制輸出,如圖2所示。由于其基本思想是先預測后控制,因此具有一定的前瞻性。該控制器主要由預測單元、優化單元和反饋校正單元作為主要組成部分[3]。

圖2 預測控制系統原理圖
(1)模型預測單元
模型預測是能夠預測輸出變量未來動態行為的變化趨勢。它是一個信息集合。如階躍響應模型、脈沖響應模型、CARIMA模型,神經網絡模型等。
(2)誤差反饋校正單元
由于實際系統的非線性,這就使模型預測單元輸出量與實際輸出量存在著差異,這時就需要對模型預測單元輸出進行補償和校正。其措施是在預測單元的控制中加入負反饋環節,以形成閉環控制。也就是將第i步的實際輸出值y(i)與模型預測單元的輸出值yk(i)之間的誤差值e(i),補償到模型預測單元輸出值yk(i+n)(n為疊加步數,n為自然整數)上,如此便可得到閉環輸出的預測值為:

式中e(i)為i時刻模型預測單元的輸出誤差值,f為補償系數。
(3)優化單元的滾動優化
模型預測控制的功能是使系統的輸出值在將來z步范圍內的預測值與標準值之間的誤差達到最小。也就是說在任一個采樣時刻i,優化單元始終是以此時刻作為起點,以將來z步范圍內的性能為指標,以求得最優控制規律u(i),并將當前時刻的u(i)作用于系統,以求取下一時刻預測值yz(i+n),從而實現滾動優化。其最大疊加步數為:

式中qn為誤差修正系數,rn為控制修正系數,Δu(i+n-1)=u(i+n-1)-u(i+n-2),yr(i+n)為參考軌跡;參考軌跡的形式為[4]:

式中g為輸入給定值,T0為標準輸入軌跡常數,T為采樣周期。
模型預測控制中所采用滾動式優化方法,只管每次進行優化計算所到得的結果只是一個局部的過程優化解,但由于在計算過程中實施的是滾動優化,所以對模型的非線性等能夠及時的得到校正。
2.模塊預測單元模型
對于非線性動態過程,為使在控制中達到滿意的效果,通過多種控制方法比較可知,最佳的控制方法是采用神經網絡控制。設神經網絡為圖3所示的三層前饋網絡。該網絡的輸入為系統歷史的輸入與輸出信息,網絡的輸出為系統的輸出。
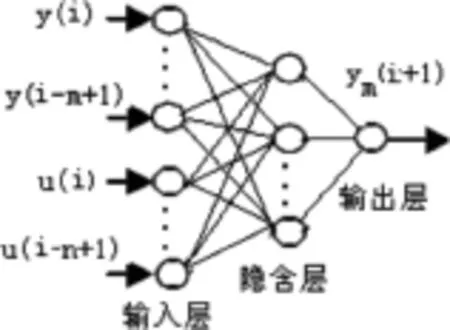
圖3 用作預測模型的前饋神經網絡結構
其表達式為:

式中ym(i)是前一時刻m個輸出與前一時刻n個輸入的預測值。F為非線性函數。利用上式進行反復推算可得到i步超前預測模型,如下式所示。

很明顯,在該模型中用到了i時刻以后的預測值ym(i+n),而對i時刻及前一時刻的預測值,可用ym(i+n-l)=y(i+n-l)(n-l≤0,l為自然整數)來代替。
由此可見,要建立系統的神經網絡預測模型,應首先考慮以被控對象的輸入參數以及輸出參數作為該系統的樣本模式,建立具有一定控制模式和精度的神經網絡模型,使其輸出值ym(i)以最大限度的接近被控對象的實際輸出值y(i)。
3.神經網絡預測控制器結構
基于以上模型,并根據預測控制原理進行滾動優化。預測控制器采用的性能指標函數除上式外,同時還應使:
e(i+n)=yd(i+n)-y(i+n)
若該預測控制器中的△u(i)是收斂的,預測模型輸出誤差e(i+ n)應趨于零,此時可根據未來輸出的期望值yd(i+n),性能指標N,得到未來的控制量。神經網絡預測控制器的結構如圖4所示[3]。
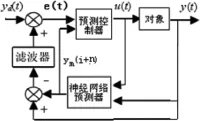
圖4 神經網絡預測控制器結構圖
4.主要算法
(1)設定初始條件,包括初始疊加步數n、誤差修正系數qn,控制修正系數rn,標準輸入軌跡常數T0,采樣周期T,最大疊加步數N,神經網絡輸入設定值g等;
(2)以被控系統的輸入信號和系統輸出信號作為神經網絡的練習標本,并應用MGA練習方法,以此獲得的神經網絡作為非線性預測模型;
(3)獲取將來期望的輸出數據列yd(i+n|i);
(4)采用已獲得的非線性預測模型產生預測輸出值ym(k+j|k),并以前一時刻的誤差為基礎,補償和校正在下一時刻可能出現的新的預測誤差y(i+n|i),而y(i+n|i)可按下列公式計算得到:
(5)計算未來時刻期望值的誤差:e(i+n)=yd(i+n)-y(i+n|i);
(6)通過對性能指標N和e(i)極小化,可得最優控制序列u(i+ n);
(7)將控制量u(i)輸入系統,返回(3)進行循環。
三、神經網絡預測控制在污水處理中的應用
1.控制參數的確定
在活性污泥法處理系統中,由于參與的物理量較多,因此需要控制的變量也較多,主要有曝氣池中所送入的風量(即曝氣量)的大小,由二沉池回送給曝氣池的回流污泥比和二沉池排放的剩余污泥量等,要妥善合理地解決這些問題,就必須要找到一個既能在線監測,又能反映污水處理進程的控制參數。經查找大量的文獻資料表明[5-6]:溶解氧(DO)濃度的變化規律能夠有效反映有機微生物化解、脫磷除氮的反應進程,因此以溶解氧(DO)濃度的變化作為污水處理的控制參數是合理的。在實際操作中主要是通過調節鼓風機的轉速來控制進入到曝氣池的空氣量的大小,以此來調節溶解氧(DO)的濃度。原理框圖如圖5所示。

圖5 DO濃度控制結構圖
本設計中DO濃度的設定值g=9.3mg/L,誤差修正系數qn= 0.85,控制修正系數rn=0.45,初始迭代步數n=0,最大疊加步數N= 15,參考軌跡時間常數T0=4.5s,系統采樣周期T=2s。
2.神經網絡預測控制的實現
神經網絡預測控制器由AT89C52單片機、A/D和D/A變換器等組成。其硬件結構如圖6所示。
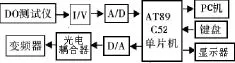
圖6 神經網絡預測控制硬件結構圖
首先將生化池中的DO值通過DO測試儀檢測,再通過電流/電壓轉換器變換,并經摸/數轉換器將模擬量轉換成數字量后輸入單片機,在單片機中將輸入數據送入神經網絡進行處理后,將其結果經數/模轉化器轉換后,由光電耦合器進行隔離后,控制變頻器的輸出頻率,進而控制鼓風機的轉速。系統中還設置了上位機(PC機),其目的主要是監控下位機(單片機)的運行狀況、控制效果、儲存、打印數據等。圖7為污水變化時(可通過污水閥開度的變化)的控制結果。從溶解氧(DO)濃度變化曲線可見,當系統的輸入量發生緩慢的的非線性變化時,采用神經網絡預測控制后,可使被控量變化較小,比較穩定,說明該系統抗干擾能力較強,控制精度較高。
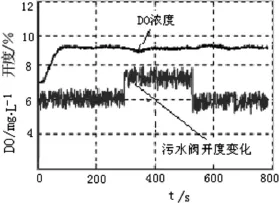
圖7 污水變化時神經網絡控制結果
四、結論
將神經網絡預測控制應用于污水處理這種慢時變非線性系統中,并通過單片機控制變頻器改變風機的轉速,以滿足曝氣池對氧氣的需要,只要參數設置適當,就可以獲得滿意的效果;在處理的水質達到國家標準的前提下,該控制方法與傳統的控制方法相比不但控制效果好,而且還可以節約大約15%電量,并減少了運行費用。
[1]陳金紅,白瑞祥.模糊控制在工業污水處理過程中的應用[J].微計算機應用,2009,30(4):58-61
[2]曾環木.城鎮污水采用活性污泥法除磷脫氮工藝探討[J].廣東化工,2009,36(3):61-64
[3]舒迪前.預測控制系統及其應用[M].北京:機械工業出版社,1996
[4]謝生鋼,周立芳,趙麟菱.污水處理過程的多目標多模型預測控制方法研究[J].化工自動化及儀表,2008,35(1):24-27
[5]李偉民,江映翔,尹大強,王連生.微生物選育技術在廢水生物處理中的應用進展[J].環境污染治理技術與設備,2001,2(4):49-52
[6]劉載文,許繼平,楊斌,侯朝楨,程志強.序批式活性污泥法污水處理系統溶解氧優化控制方法[J].計算機與應用化學,2007,24(2):231-234
劉玉章(1959-),男,河北省石家莊人,高級講師,主要從事電子技術、電氣自動控制的教學和科研工作。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19