基于現(xiàn)場(chǎng)可編程門陣列的永磁同步電機(jī)伺服系統(tǒng)*
2016-10-26 05:55:46邢天宇王孝洪田聯(lián)房
電機(jī)與控制應(yīng)用 2016年8期
關(guān)鍵詞:測(cè)量
邢天宇, 王孝洪, 田聯(lián)房
(華南理工大學(xué) 自動(dòng)化科學(xué)與工程學(xué)院,廣東 廣州 510640)
?
基于現(xiàn)場(chǎng)可編程門陣列的永磁同步電機(jī)伺服系統(tǒng)*
邢天宇,王孝洪,田聯(lián)房
(華南理工大學(xué) 自動(dòng)化科學(xué)與工程學(xué)院,廣東 廣州510640)
提出了一種基于Altera公司生產(chǎn)的現(xiàn)場(chǎng)可編程門陣列(FPGA)的永磁同步電機(jī)伺服控制系統(tǒng)的設(shè)計(jì),運(yùn)用了矢量變換、坐標(biāo)變換等策略,使用了空間矢量脈寬調(diào)制(SVPWM)、 Cordic、 PID控制等技術(shù),并以FPGA為主控制器將其實(shí)現(xiàn)。同時(shí)給出了系統(tǒng)的整體結(jié)構(gòu),最后利用PWM逆變器對(duì)系統(tǒng)進(jìn)行試驗(yàn)驗(yàn)證,試驗(yàn)結(jié)果印證了理論的正確性,證明系統(tǒng)有良好的性能。
現(xiàn)場(chǎng)可編程門陣列; 矢量控制; 永磁同步電機(jī); 伺服系統(tǒng)
0 引 言
制造業(yè)是國(guó)家經(jīng)濟(jì)的支柱,而其中伺服系統(tǒng)的性能在制造業(yè)中起了很關(guān)鍵的作用。生活中,伺服系統(tǒng)也扮演了極為重要的角色[1]。家用電器、汽車、電子類,或是其他相關(guān)產(chǎn)品,都和伺服系統(tǒng)息息相關(guān)。因此,國(guó)內(nèi)外都十分重視伺服系統(tǒng)的探索與研究。
當(dāng)前伺服系統(tǒng)的主要研究方向是在交流永磁同步電機(jī)的平臺(tái)上研究伺服系統(tǒng),同步電機(jī)性價(jià)比很高,低速時(shí)的性能也較為優(yōu)越[2]。為了更好地控制永磁同步電機(jī),研制相對(duì)簡(jiǎn)單高效的控制系統(tǒng)一直是重中之重。
近年來(lái),隨著技術(shù)的革新,電子設(shè)計(jì)自動(dòng)化(Electronic Design Automatic, EDA)技術(shù)一直在發(fā)展和進(jìn)步,現(xiàn)場(chǎng)可編程門陣列(Field Programmable Gate Array, FPGA)芯片的性能也有了提升。甚至很多新的算法也可以通過(guò)FPGA來(lái)實(shí)現(xiàn)[3]。與其他的控制芯片相比,F(xiàn)PGA更加快速穩(wěn)定,也有更好的可重構(gòu)性。FPGA用硬件描述語(yǔ)言,以硬件的方式來(lái)控制各個(gè)腳的輸出,比軟件程序具有更好的穩(wěn)定性,因此把FPGA作為主要控制芯片來(lái)控制伺服系統(tǒng)的優(yōu)勢(shì)是巨大的。
本文以Altera公司的FPGA芯片EP4CE30F23 C8為核心,搭建了雙閉環(huán)控制系統(tǒng)和硬件試驗(yàn)平臺(tái),最后通過(guò)試驗(yàn)驗(yàn)證了其有效性。
1 基本原理
1.1電機(jī)矢量控制原理
永磁同步電機(jī)的控制策略有很多,使用最廣泛并且最有效的是矢量控制策略。其工作原理是通過(guò)坐標(biāo)變換,將三相系統(tǒng)等效為兩相系統(tǒng),再經(jīng)過(guò)旋轉(zhuǎn)坐標(biāo)變換實(shí)現(xiàn)對(duì)定子電流的解耦[4],以達(dá)到電動(dòng)機(jī)的磁鏈和轉(zhuǎn)矩分開(kāi)控制的目的。
一般定義電流矢量為
(1)
綜上所述,首先進(jìn)行Clark變換,結(jié)果為
(2)
再經(jīng)過(guò)Park變換,結(jié)果為
(3)
式中: θ——變換角度。
在變換后的坐標(biāo)系下,電壓方程為
(4)
其中:
(5)
式中: R——定子電阻;
q——微分環(huán)節(jié)系數(shù);
ω——角速度;
φd、φq——d、q軸磁通分量;
φf(shuō)——定子磁通。
Park變換后的電磁轉(zhuǎn)矩為
(6)
保持id=0,則
(7)
由此可見(jiàn),實(shí)現(xiàn)了勵(lì)磁和轉(zhuǎn)矩的分開(kāi)控制,達(dá)到了解耦的效果。
1.2空間矢量脈寬調(diào)制
空間矢量脈寬調(diào)制(Space Vector Pulse Width Modulation, SVPWM)技術(shù)在交流電機(jī)變頻驅(qū)動(dòng)中有著很重要的應(yīng)用。其通過(guò)不同的開(kāi)關(guān)組合[5],來(lái)跟蹤實(shí)際的磁鏈圓。SVPWM技術(shù)具有很好的最大電壓利用率,同時(shí)線性調(diào)節(jié)性能也相當(dāng)優(yōu)越。
圖1所示三相逆變器的8個(gè)開(kāi)關(guān)狀態(tài)分別為U0(000)、U1(100)、U2(110)、U3(010)、U4(011)、U5(001)、U6(101)、U7(111)。其中1表示對(duì)應(yīng)的那一相上橋臂導(dǎo)通,下橋臂關(guān)斷;0則相反,表示下橋臂導(dǎo)通,上橋臂關(guān)斷。
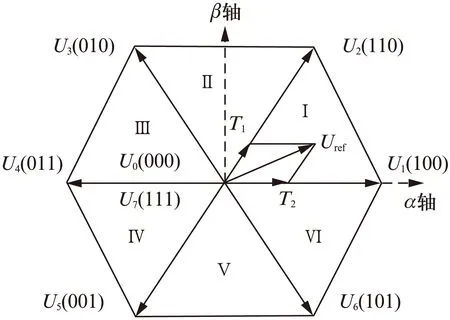
圖1 三相逆變器的8個(gè)開(kāi)關(guān)狀態(tài)
在實(shí)際運(yùn)行中,通過(guò)三相逆變器[6]的8個(gè)開(kāi)關(guān)狀態(tài)去模擬幅值不變的旋轉(zhuǎn)矢量。根據(jù)Urefα,Urefβ來(lái)計(jì)算矢量所在哪個(gè)扇區(qū),確定需要合成的目標(biāo)矢量,同時(shí)計(jì)算相應(yīng)的占空比,最終得到需要輸出的PWM信號(hào)。
1.3Cordic算法
在Park變換中,坐標(biāo)旋轉(zhuǎn)需要用到大量的三角函數(shù)計(jì)算,采用的是Cordic算法[7]。Cordic算法具有結(jié)構(gòu)簡(jiǎn)單、速度快等優(yōu)點(diǎn),更容易在FPGA中實(shí)現(xiàn)。
當(dāng)θ∈[-π,π]時(shí),在圓周坐標(biāo)系中Cordic算法的迭代公式為
i=0,1,2,…,n-1
(8)
迭代初始值為
(9)
定義符號(hào)函數(shù)如下:
(10)
迭代足夠多次時(shí):
(11)
1.4PI控制器
控制器是系統(tǒng)中非常重要的環(huán)節(jié)。選用PI控制器主要出于易于實(shí)現(xiàn)、較為可靠的原因[8]。PI控制器在工業(yè)制造其他領(lǐng)域也有著比較廣泛的應(yīng)用。
PI控制器可以表示為
PI(n)=PI(n-1)+Kp[e(n)-
e(n-1)]+Kie(n)
(12)
式中:Kp——比例環(huán)節(jié)增益;
e(n)——誤差輸入;
Ki——積分環(huán)節(jié)增益。
1.5 M/T速度測(cè)量器
目前廣泛使用的測(cè)速方法,主要有測(cè)量頻率方法和測(cè)量周期方法兩種[9]。M法是對(duì)頻率進(jìn)行測(cè)量,測(cè)量一定時(shí)間下的脈沖數(shù)目,換算成對(duì)應(yīng)的頻率。T法是對(duì)周期進(jìn)行測(cè)量,測(cè)量?jī)蓚€(gè)脈沖之間間隔的時(shí)間單位,把它換算成周期。
M法和T法各自有各自的缺點(diǎn): M法中,測(cè)量的一開(kāi)始和末尾會(huì)可能存在半個(gè)脈沖的影響,會(huì)有誤差,從而在高速的條件下性能較好;而周期方法,首尾會(huì)存在半個(gè)時(shí)間單位的影響,會(huì)有1個(gè)單位的時(shí)間誤差,從而適合測(cè)量低速。
在這里選用了M/T測(cè)速法[10],就是在對(duì)反應(yīng)轉(zhuǎn)速n的脈沖計(jì)數(shù)的同時(shí),也對(duì)脈沖個(gè)數(shù)的時(shí)基脈沖進(jìn)行計(jì)數(shù)。
此時(shí)的轉(zhuǎn)速可以表示為
(13)
式中:f0——時(shí)基脈沖頻率;
P——每轉(zhuǎn)產(chǎn)生的脈沖個(gè)數(shù);
m1、m2——測(cè)量開(kāi)始到結(jié)束這段時(shí)間內(nèi)的反應(yīng)轉(zhuǎn)速的脈沖數(shù)和時(shí)基脈沖個(gè)數(shù)。
2 系統(tǒng)模塊實(shí)現(xiàn)
2.1Cordic模塊
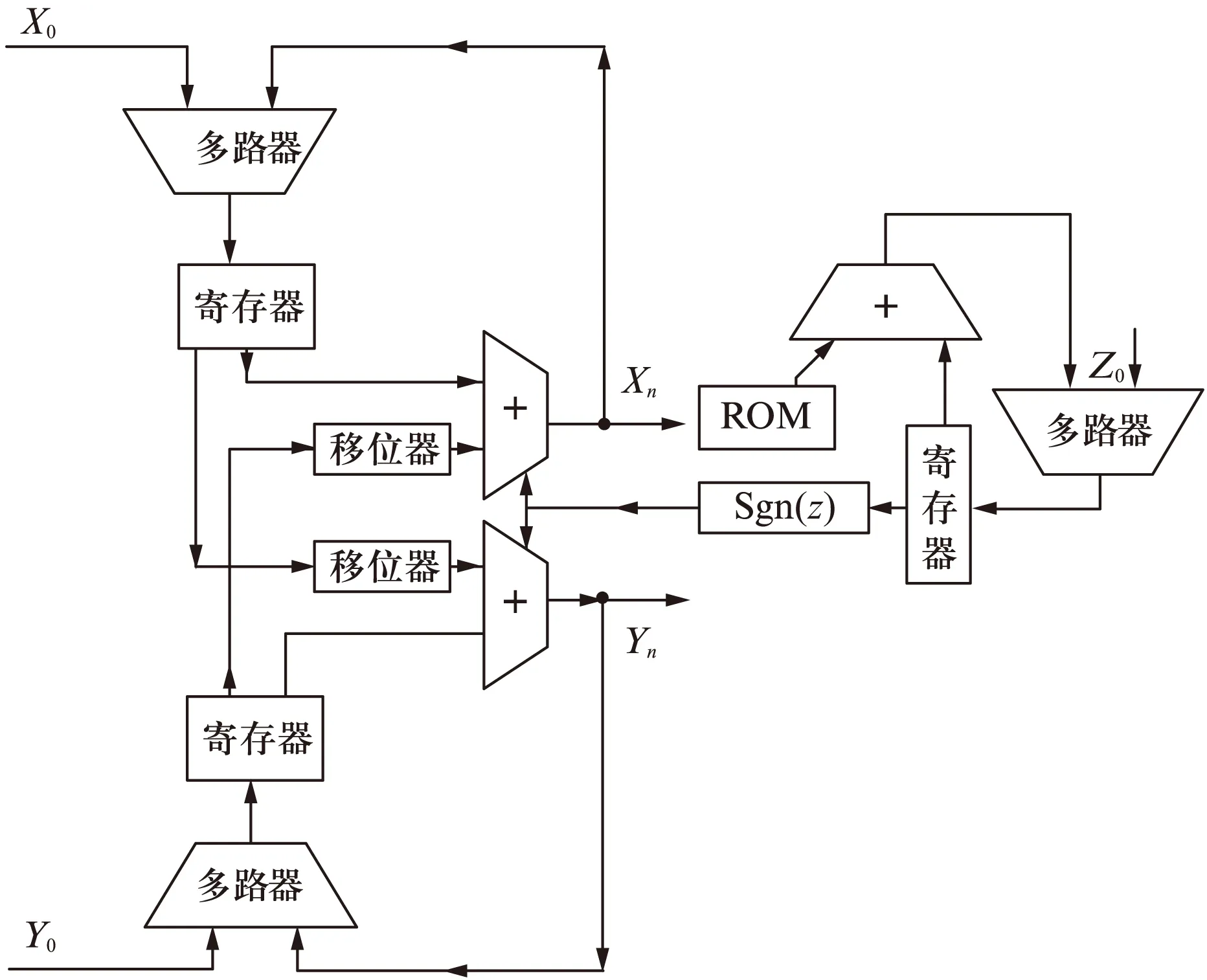
圖2 Cordic模塊流程圖
2.2SVPWM模塊
SVPWM模塊主要由定標(biāo)運(yùn)算、扇區(qū)判斷、矢量分配、時(shí)間計(jì)算、死區(qū)調(diào)節(jié)等子模塊組成。如圖3所示。圖3中,模塊的輸入是Uα,Uβ信號(hào);Init為初始化信號(hào);Ctrl為控制信號(hào),控制系統(tǒng)的狀態(tài),比如運(yùn)行在故障保護(hù)、故障清除等狀態(tài)[12];Mode為模式選擇,0時(shí)是不對(duì)稱模式,1時(shí)是對(duì)稱模式;N為開(kāi)關(guān)頻率設(shè)置值;Dead-time為死區(qū)時(shí)間設(shè)置值。設(shè)定開(kāi)關(guān)頻率為16kHz,死區(qū)時(shí)間為0.8μs。
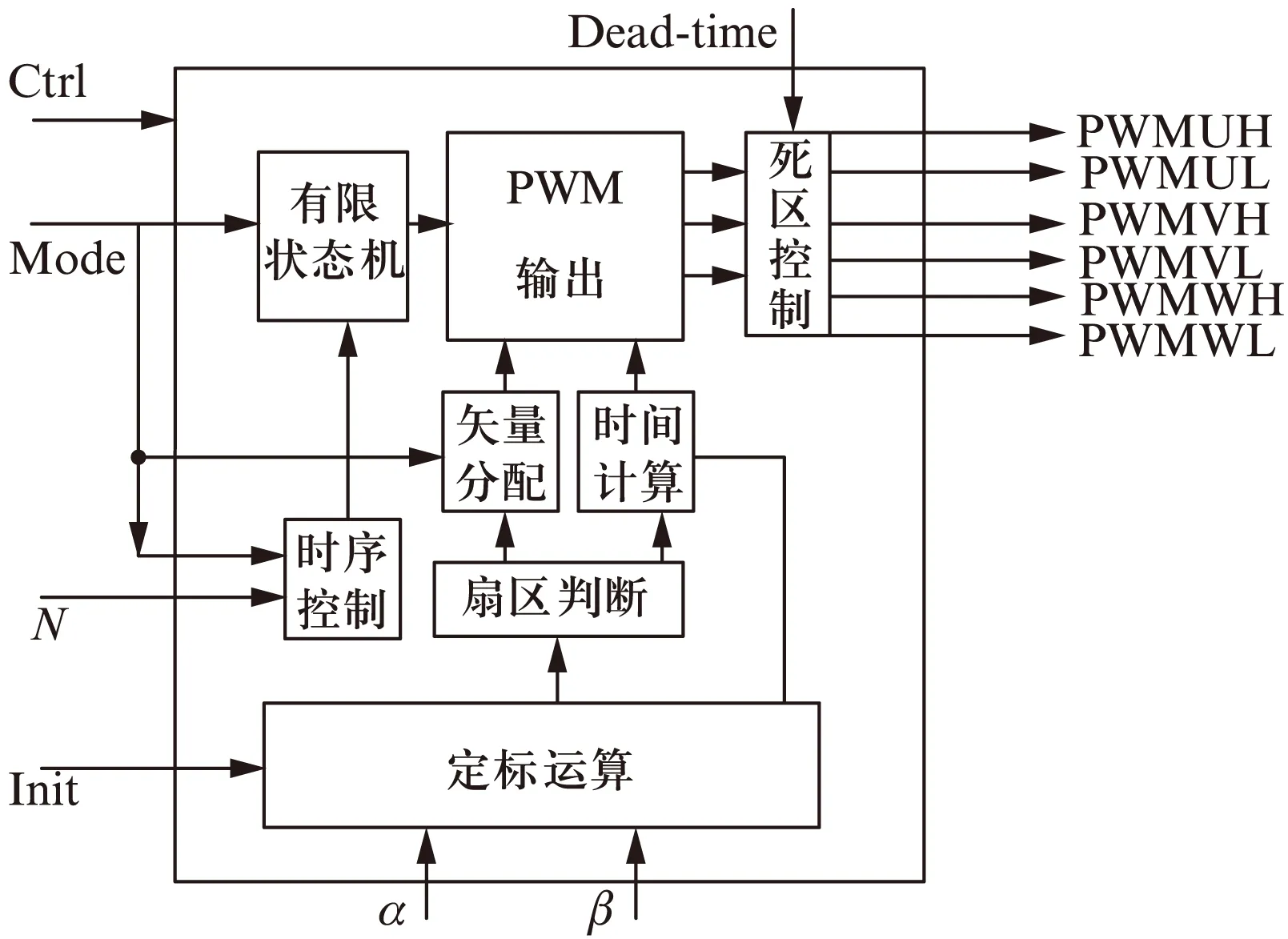
圖3 SVPWM模塊
2.3PI控制器的實(shí)現(xiàn)
PI模塊結(jié)構(gòu)如圖4所示,其中用到了抗積分飽和的方法。當(dāng)參考值較大時(shí),積分器有可能建立一個(gè)很大的誤差值[13],這個(gè)誤差值在積分的慣性作用下將要維持一段時(shí)間,從而導(dǎo)致很大的超調(diào)。因此,在輸出飽和時(shí)立刻關(guān)閉積分作用,即可減少對(duì)超調(diào)的影響。
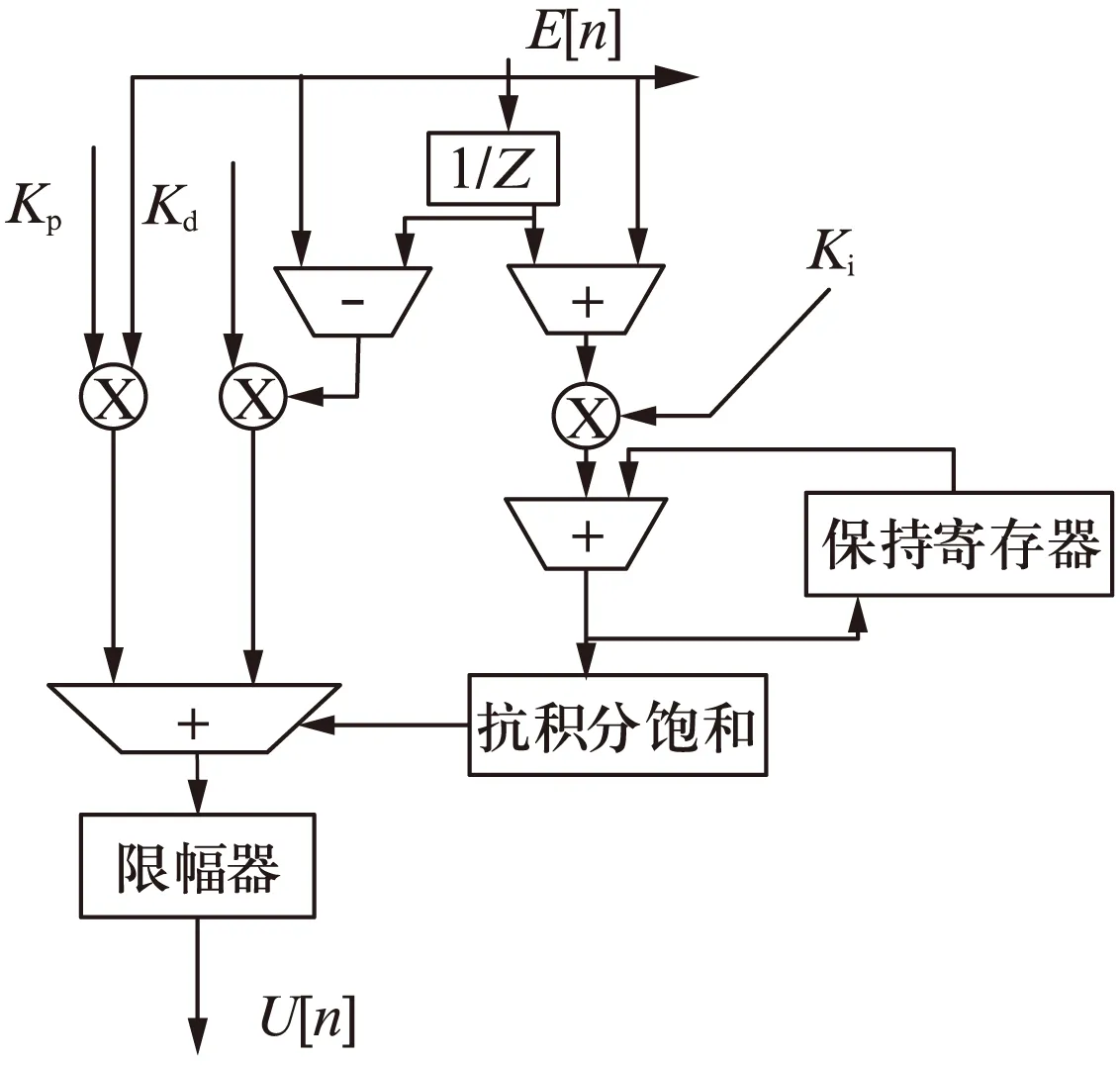
圖4 PI控制器
3 系統(tǒng)硬件結(jié)構(gòu)
系統(tǒng)主電路采用交直交的方案。先是通過(guò)二極管整流得到直流母線電壓[14];再通過(guò)控制板上
的FPGA來(lái)控制PWM逆變器;控制系統(tǒng)同時(shí)還具有過(guò)壓過(guò)流保護(hù)的功能,保證系統(tǒng)的安全運(yùn)作。控制電路采用Altera公司的FPGA芯片EP4CE30F23C8作為控制器,通過(guò)霍爾元件和光電編碼器測(cè)得相電流值和轉(zhuǎn)速[15],以上文提到的方式進(jìn)行坐標(biāo)變換,并將得到的電壓空間矢量PWM信號(hào)發(fā)送給驅(qū)動(dòng)電路,驅(qū)動(dòng)電路驅(qū)動(dòng)IGBT的開(kāi)關(guān)管[16]。系統(tǒng)的硬件結(jié)構(gòu)框圖如圖5所示。
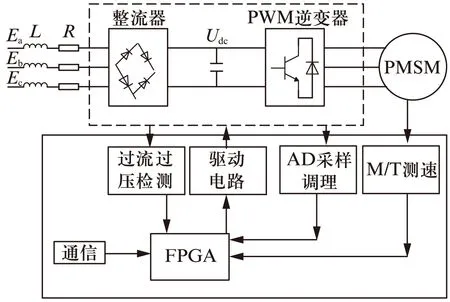
圖5 系統(tǒng)的硬件結(jié)構(gòu)圖
4 試驗(yàn)驗(yàn)證
對(duì)本文設(shè)計(jì)的系統(tǒng)進(jìn)行試驗(yàn)驗(yàn)證,使用Quartus 13.0進(jìn)行編譯及綜合后,邏輯單元共占用58%。使用前面描述的平臺(tái)進(jìn)行試驗(yàn),根據(jù)器件特性選取開(kāi)關(guān)管的頻率為10kHz,使用的永磁同步電機(jī)參數(shù)如下: 定子電阻Rs=4.256Ω,定子電感Ls=0.3713H,極對(duì)數(shù)為2對(duì),額定電流5A,額定轉(zhuǎn)速1500r/min,額定功率2.2kW。
圖6表示SVPWM輸出給驅(qū)動(dòng)電路的實(shí)時(shí)信號(hào)。由圖6可見(jiàn)這符合預(yù)期的估計(jì)。經(jīng)過(guò)二極管整流的母線電壓Udc、實(shí)際的相電流Ia,還有此時(shí)的變換角度θ如圖7所示。Udc為三相電經(jīng)二極管整流而來(lái),變換角度θ不斷周期變化,其變化的頻率也表征了系統(tǒng)的速度。運(yùn)行在約25Hz,即約750r/min;同時(shí),θ角的頻率和Ia的頻率一致,Ia約為2A。

圖6 SVPWM輸出給驅(qū)動(dòng)電路的實(shí)時(shí)信號(hào)
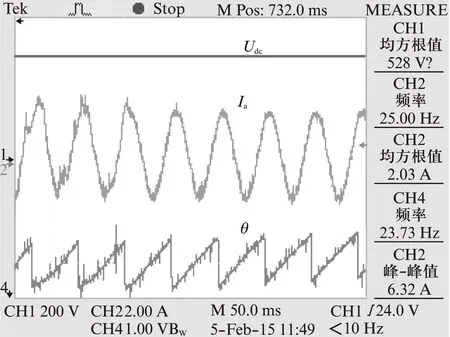
圖7 直流母線定子電流和變換角度
實(shí)際的轉(zhuǎn)速階躍響應(yīng)如圖8所示。從圖8中可以看出,給了目標(biāo)750r/min的速度命令之后,其穩(wěn)態(tài)誤差小于1%,超調(diào)量的最大值小于5%,響應(yīng)時(shí)間不到1ms,因此具有良好的動(dòng)態(tài)性能。
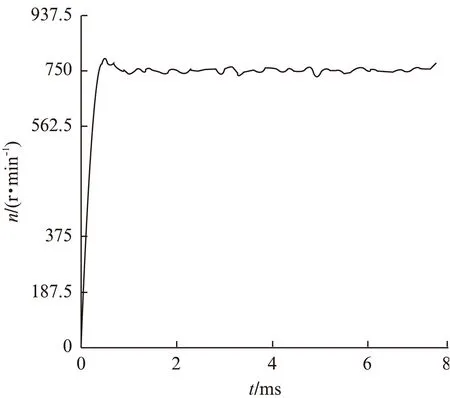
圖8 轉(zhuǎn)速階躍響應(yīng)
5 結(jié) 語(yǔ)
基于FPGA的交流永磁同步電機(jī)伺服系統(tǒng)是當(dāng)前領(lǐng)域的主流趨勢(shì),具有高性價(jià)比和低速時(shí)的優(yōu)越性能。本文通過(guò)詳細(xì)分析,提出了一種FPGA伺服控制器方案,并通過(guò)試驗(yàn),驗(yàn)證了可行性。由于該方案完全基于硬件設(shè)計(jì),具有更高的可靠性,同時(shí)也縮短了重構(gòu)周期,具有一定的實(shí)用價(jià)值。
[1]袁鵬程,張偉峰.改進(jìn)的M/T法在電機(jī)測(cè)速中的應(yīng)用[J].輕工機(jī)械,2012,30(1): 59-62.
[2]陳建國(guó),黃河.PID數(shù)字控制器多指標(biāo)優(yōu)化模擬設(shè)計(jì)方法研究[J].計(jì)算機(jī)測(cè)量與控制,2012,20(6): 1530-1534.
[3]姚戰(zhàn)江,袁景淇,姚毅.基于FPGA的多路伺服電機(jī)的智能控制[J].農(nóng)產(chǎn)品加工(學(xué)刊),2008(3): 85-87.
[4]朱麗萍,何志偉,黃少先.FPGA的結(jié)構(gòu)原理及在交流伺服電機(jī)中的應(yīng)用[J].電機(jī)電器技術(shù),2004(1): 31-33.
[5]林立.無(wú)速度傳感器永磁同步主軸電機(jī)伺服控制器的FPGA實(shí)現(xiàn)[J].微電機(jī),2011,44(4): 32-37.
[6]李兵強(qiáng),林輝.面裝式永磁同步電機(jī)電流矢量直接控制技術(shù)[J].中國(guó)電機(jī)工程學(xué)報(bào),2011,31(S1): 288-294.
[7]王慶龍,張崇巍,張興.交流電機(jī)無(wú)速度傳感器矢量控制系統(tǒng)變結(jié)構(gòu)模型參考自適應(yīng)轉(zhuǎn)速辨識(shí)[J].中國(guó)電機(jī)工程學(xué)報(bào),2007,27(15): 70-74.
[8]王紅,彭亮,于宗光.FPGA現(xiàn)狀與發(fā)展趨勢(shì)[J].電子與封裝,2007,7(7): 32-37.
[9]易龍強(qiáng),戴瑜興.SVPWM技術(shù)在單相逆變電源中的應(yīng)用[J].電工技術(shù)學(xué)報(bào),2007,22(9): 112-117.
[10]耿丹.Cordic算法研究與實(shí)現(xiàn)[J].遙測(cè)遙控,2007,28(S1): 39- 42.
[11]鄭立崗,呂幼新,向敬成,等.一種基于Cordic算法的數(shù)字鑒頻方法[J].信號(hào)處理,2003,19(1): 6-10.
[12]周衛(wèi)平,吳正國(guó),唐勁松,等.SVPWM的等效算法及SVPWM與SPWM的本質(zhì)聯(lián)系[J].中國(guó)電機(jī)工程學(xué)報(bào),2006,26(2): 133-137.
[13]徐國(guó)庫(kù),陳禾.基于Cordic算法的坐標(biāo)轉(zhuǎn)換電路的FPGA實(shí)現(xiàn)[J].現(xiàn)代電子技術(shù),2006,29(10): 108-110.
[14]楊海鋼,孫嘉斌,王慰.FPGA器件設(shè)計(jì)技術(shù)發(fā)展綜述[J].電子與信息學(xué)報(bào),2010,32(3): 714-727.
[15]萬(wàn)書(shū)芹,陳宛峰,黃嵩人,等.基于改進(jìn)CORDIC算法實(shí)現(xiàn)高速直接數(shù)字頻率合成器[J].儀器儀表學(xué)報(bào),2010,31(11): 2586-2591.
[16]周長(zhǎng)攀,蘇健勇,楊貴杰,等.基于雙零序電壓注入PWM策略的雙三相永磁同步電機(jī)矢量控制[J].中國(guó)電機(jī)工程學(xué)報(bào),2015,35(10): 2522-2533.
Permanent Magnet Synchronous Motor Servor System Based on Field Programmable Gate Array*
XINGTianyu,WANGXiaohong,TIANLianfang
(College of Automation Science and Engineering,South China University of Technology, Guangzhou 510640, China)
A permanent magnet synchronous motor servo control system was presented based on FPGA(EP4CE30F23C8) produced by Altera company, to discuss the corresponding vector conversion, coordinate transformation and other policies such as SVPWM, Cordic and PID control, and FPGA-based controller to achieve, given the overall system structure based on PWM converter, some experiments were given and the experiment results showed the good performance of the system.
field programmable gate array(FPGA); vector control; permanent magnet synchronous motor(PMSM); servor system
廣州市重大產(chǎn)學(xué)研專項(xiàng)(201508030040);廣東省省級(jí)科技計(jì)劃項(xiàng)目(2015A010106004);廣東省科技廳其他科技計(jì)劃項(xiàng)目(2013B011301012)
邢天宇(1992—),男,碩士研究生,研究方向?yàn)檫\(yùn)動(dòng)控制及嵌入式系統(tǒng)開(kāi)發(fā)。
王孝洪(1976—),男,副教授,碩士生導(dǎo)師,從事電力電子技術(shù)及其應(yīng)用方面的研究。
TM 351
A
1673-6540(2016)08- 0026- 05
2016-02-29
田聯(lián)房(1968—),男,教授,博士生導(dǎo)師,從事自動(dòng)控制應(yīng)用方面的研究。
猜你喜歡
小學(xué)科學(xué)(學(xué)生版)(2021年5期)2021-07-22 02:40:06
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級(jí))(2017年10期)2017-11-08 08:39:45
軍事文摘·科學(xué)少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學(xué)少年(2017年2期)2017-04-26 21:58:43
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學(xué)低年級(jí)版)(2015年4期)2015-04-29 00:00:00
