電動汽車EPS助力曲線設計與評價研究
2016-10-27 01:46:34張永輝陳丁躍申福林
重慶理工大學學報(自然科學) 2016年9期
張永輝,王 悅,陳丁躍,申福林
(1.西安航空學院 車輛工程學院,西安 710077; 2.長安大學 汽車學院,西安 710064)
?
電動汽車EPS助力曲線設計與評價研究
張永輝1,王悅1,陳丁躍2,申福林2
(1.西安航空學院 車輛工程學院,西安710077; 2.長安大學 汽車學院,西安710064)
對電動汽車助力轉向特性進行分析,研究不同車速下駕駛員理想轉向盤力矩隨方向盤轉角、側向加速度變化的規律。以駕駛員理想轉向盤力矩為依據,擬合出高、低速范圍內理想轉向盤力矩,并分析了低速范圍內理想轉向盤力矩模型參數及其影響因素。提出了符合轉向特性的助力函數形式,設計了電動汽車的助力特性曲線,并闡述了設計原理及過程。在ADAMS/CAR中建立的整車模型與Matlab進行聯合仿真。試驗結果表明:所設計的助力曲線更符合轉向特性的要求。
電動汽車;電動助力轉向系統;理想轉向盤力矩特性;助力曲線;助力函數
電動助力轉向系統(EPS)在改善汽車操縱性和穩定性方面優于其他轉向系統。電動助力轉向系統在不同型號車輛上的結構部件盡管不一樣,但是基本原理是一致的,一般是由助力電機、控制單元、方向盤轉矩傳感器及轉向器等機械傳動部分組成[1]。EPS系統開發的首要任務是確定適合的助力特性。助力特性是指電機助力力矩隨汽車運動狀態變化而不斷變化的規律[2]。一個好的助力特性能協調駕駛員和整車、路面狀況的關系,從而解決轉向輕便性與路感之間的矛盾。
目前,針對助力特性的研究多為曲線型助力,這是因曲線型較直線型可獲得更好的路感,但曲線型助力特性在低速及原地轉向時輕便性較差。本文以某款電動車為例,分析了助力特性的影響因素,擬合出一種助力曲線函數形式。試驗結果表明:該助力曲線更符合汽車轉向特性的要求。
1 助力特性分析
EPS電機助力力矩等于路面傳遞到轉向盤的阻力矩與駕駛員施加在轉向盤力矩的差值這一原則不變。汽車行駛時轉向盤阻力矩主要有地面摩擦力矩引起的阻力矩、垂向力回正力矩引起的阻力矩、側向力回正力矩引起的阻力矩、縱向力回正力矩和系統干摩擦力矩組成[3],所以只要確定駕駛員施加在轉向盤的力矩,即可確定助力力矩。吉林大學通過駕駛模擬器得到了我國駕駛員理想的轉向盤力矩特性,即在車速大于40 km/h且在不同質心側向加速度下,以駕駛員施加在轉向盤的操控感為基礎的轉向盤力矩特性,如表1所示。
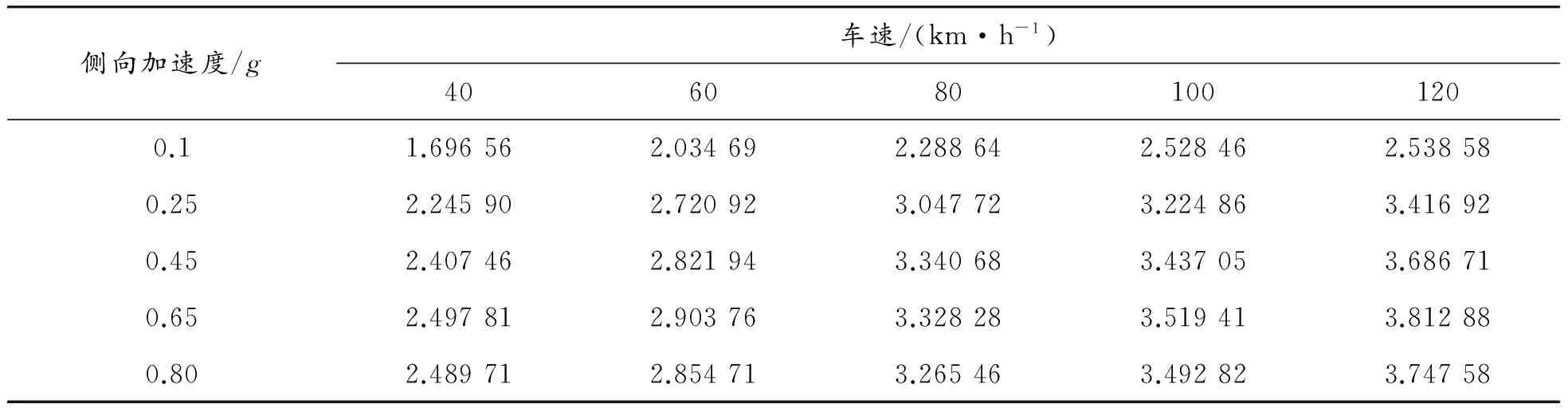
表1 理想的轉向盤力矩平均值
高速時小的轉向盤轉角會引起大的側向加速度,所以駕駛員對側向加速度敏感,而汽車以低于40 km/h的車速行駛或原地轉向時,質心側向加速度變化率很小,駕駛員對側向加速度的感知較模糊,而對方向盤轉角的變化比較敏感。在低速及原地轉向時,駕駛員理想轉向盤力矩可由式(1)計算[4]得到。
(1)
式中:Texpect_l為理想轉向盤力矩;V為車速;l1為駐車因子;k1為車速感知因子;a1為極限把持因子;b1為抗干擾因子;c1為轉向盤轉角感知因子。若車輛體積、整車質量等相近,理想轉向盤力矩與車型無關[5],所以式(1)適合于整車基本參數相近的車型。
2 助力曲線參數的確定
2.1轉向盤總阻力矩的確定
在MSC.ADAMS/CAR中建立整車機械系統模型及路面譜模型。整車機械系統模型包括懸架系統、轉向盤、轉向柱、齒輪齒條轉向器和輪胎模型,如圖1所示。在特定車速下轉動轉向盤至極限位置,仿真出轉向盤阻力矩最大值。
2.2駕駛員理想轉向盤力矩的確定
為使轉向盤易于操控且轉向盤力矩過渡平緩,通過Matlab軟件中cftool工具對高速段轉向盤力矩隨車速及側向加速度的變化規律進行多項式擬合取平均值,得出車速在40~120km/h時駕駛員理想的轉向盤力矩圖譜,如圖2所示。
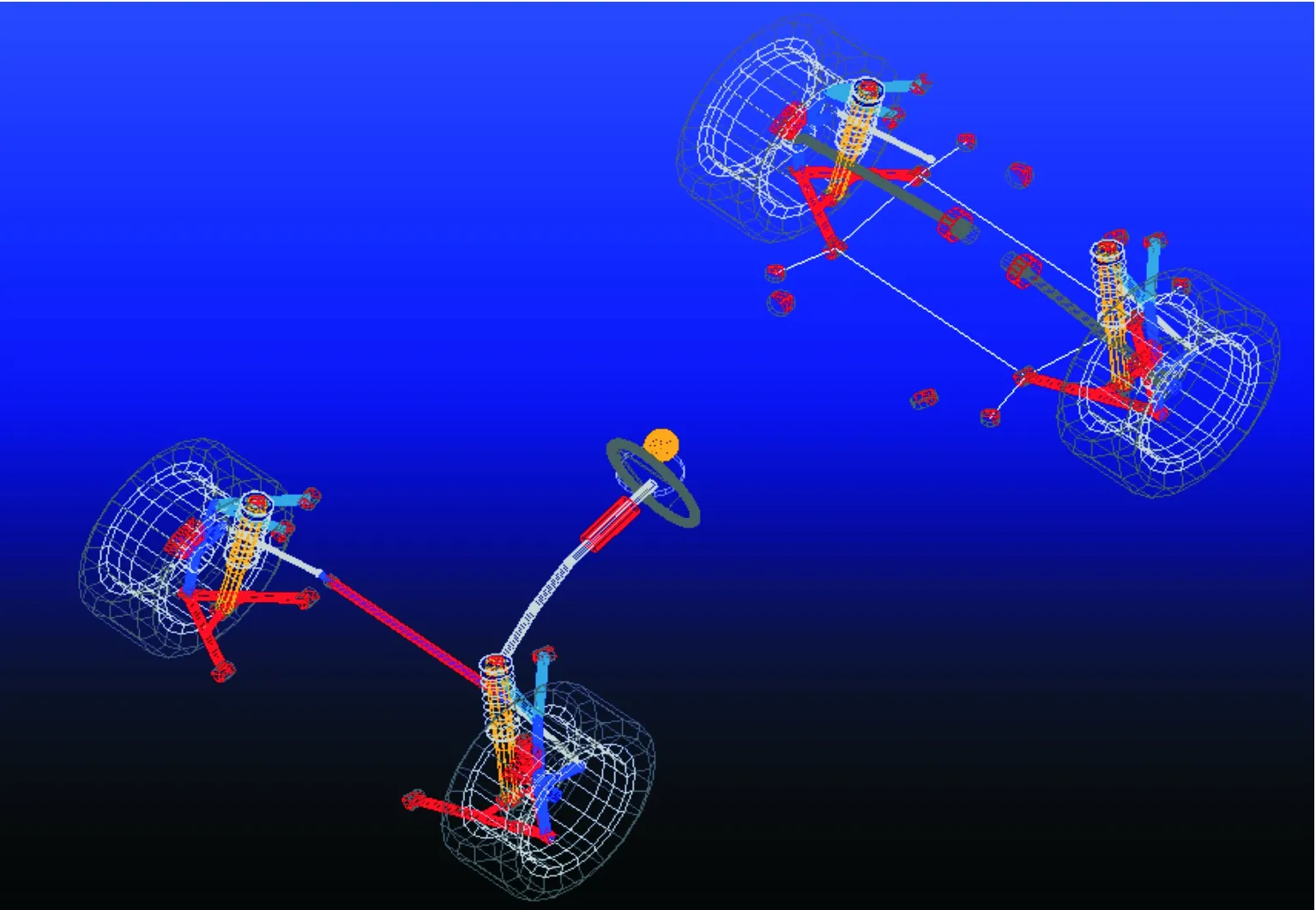
圖1 整車機械系統模型
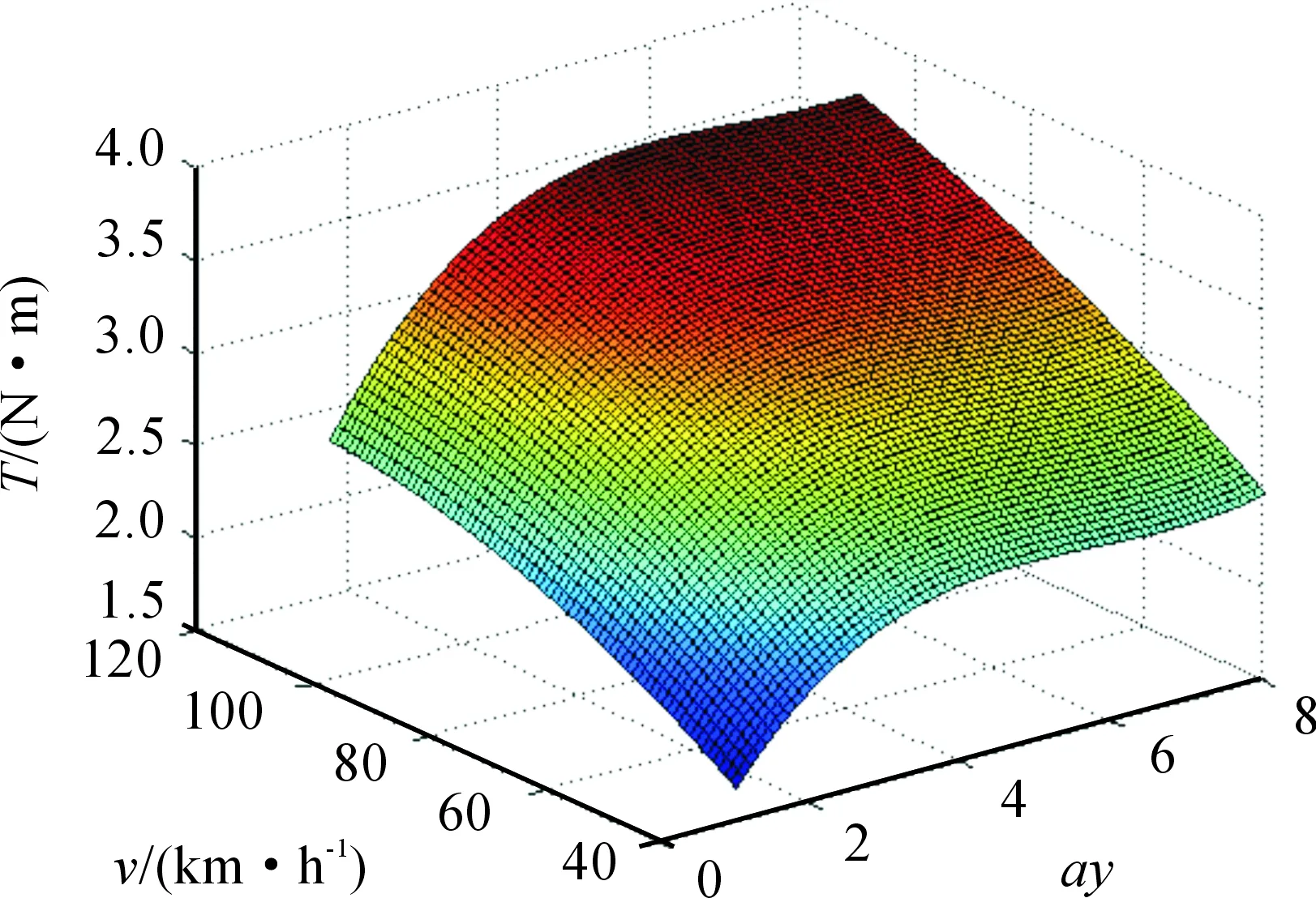
圖2 車速在40~120 km/h時的理想轉向盤力矩三維圖
通過式(1)及駕駛試驗得出低速段的車輛在0~20km/h的理想轉向盤力矩圖譜,如圖3所示。同時得出該車型l1、a1、c1分別為0.67、2.18、0.3,k1、b1分別為0.028、1.4。研究發現:調整車速感知因子k1值,低速下轉向盤力矩可在較大的范圍內變化,這為載質量較大的商用車EPS開發提供了理論依據,而抗干擾因子b1對轉向盤力矩變化影響不大。
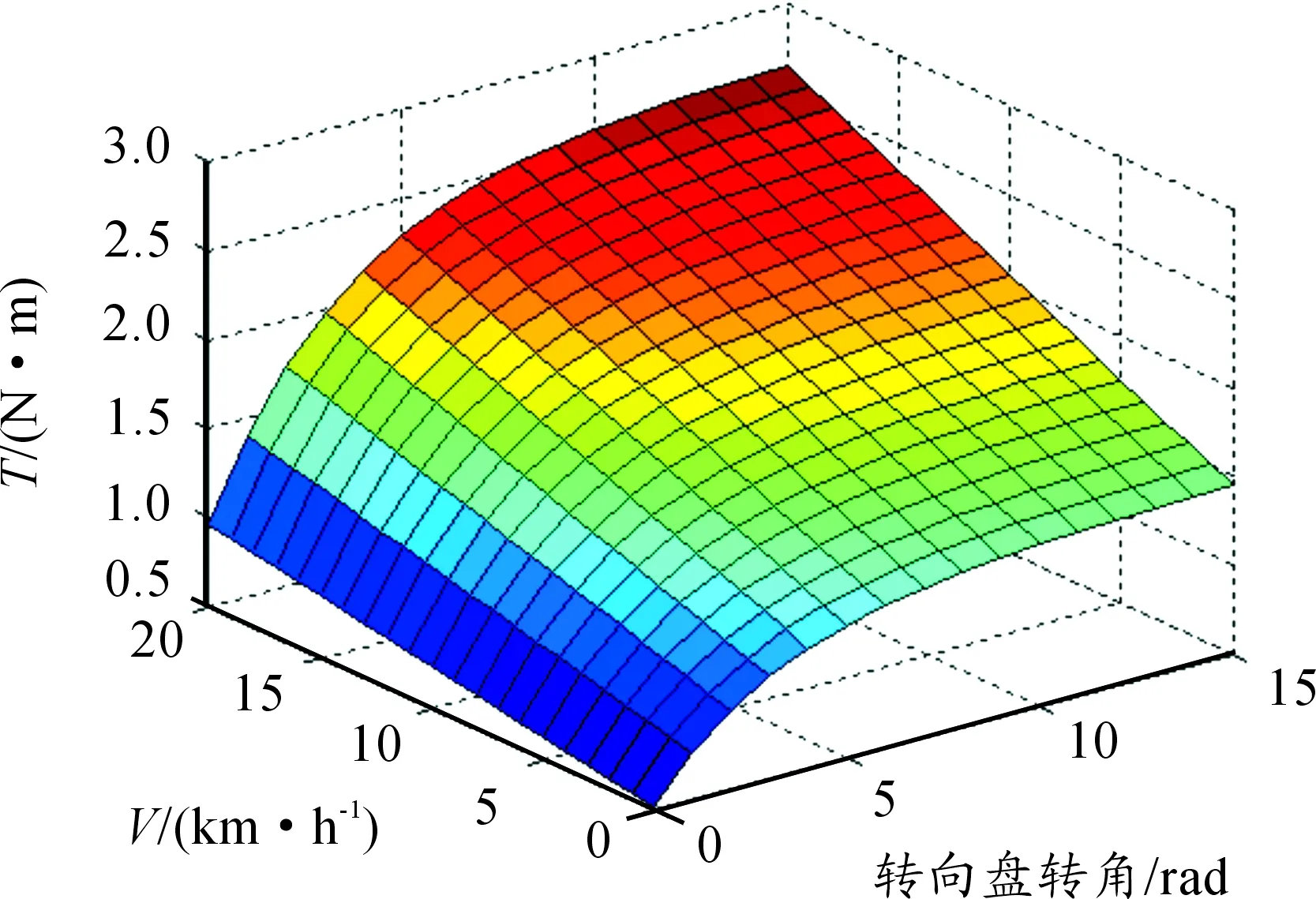
圖3 車速在0~20 km/h時的理想轉向盤力矩三維圖
2.3助力函數的確定
在傳統助力曲線設計中,研究人員一般會選擇一條線型曲率較好的函數作為基本助力函數,如拋物線、直線等,然后根據轉向阻力距最大值及車速感應系數擬合其他車速下的助力曲線。這就使得現有的助力曲線不能很好地滿足車速與助力力矩間的關系,從而不能實現由低速行駛時助力效果明顯向高速行駛時路感增強轉變。理想的助力曲線應由低速范圍內的直線型逐漸向高速范圍內的曲線型逐漸過渡,以此保證低速行駛轉向輕便,同時高速行駛時兼具一定的路感。
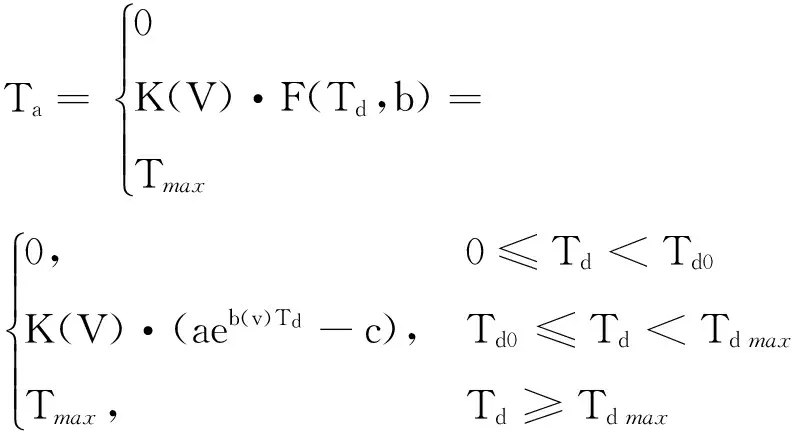
(2)
式中:Ta為電機助力力矩;Td為轉向盤力矩;a、c為比例常數,該常數值決定了轉向盤力矩的范圍;b(v)為車速比例值,其值與助力曲線凹凸性有關,且隨著車速的增大,b(v)值逐漸增大。具體數據見表2。
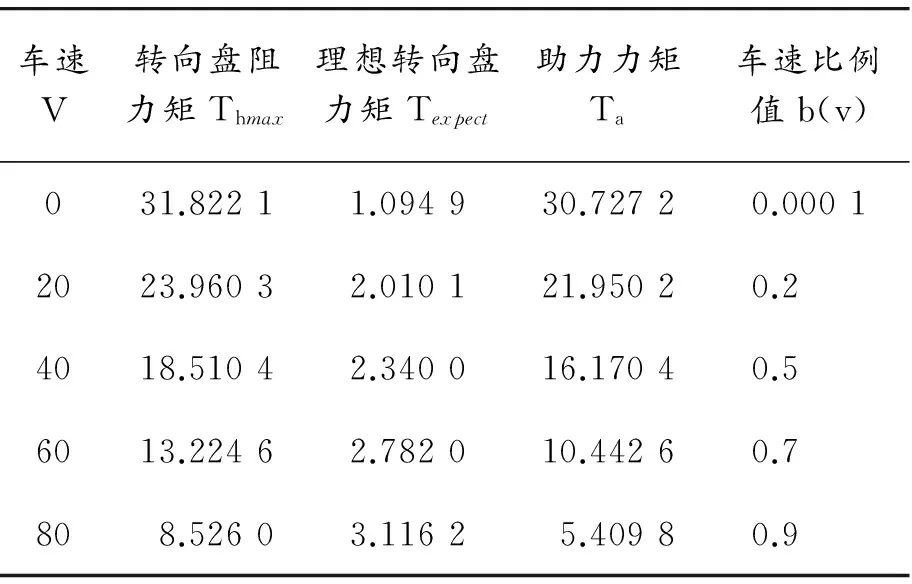
表2 特定車速下轉向阻力矩、理想轉向盤力矩、助力力矩及車速比例系數
該助力函數具有以下特點:① 曲線斜率隨著車速增加而下降;② 曲線凹性隨著車速增加逐漸增強;③ 車速為0時助力曲線為近似直線。
為了減少數據存儲量,提高運算速度,加入車速感應系數K(V),它只在速度區間范圍內起作用,且按車速分段擬合。設計過程如下:首先,a、c取值根據Td的取值范圍和該車速下最大助力力矩Tamax(轉向阻力矩與轉向盤力矩的差值)求得,當車速超過80km/h后取消助力;其次,對應的線型滿足車速下駕駛員理想轉向盤力矩;最后,按車速區間范圍的不同,分段用車速感應系數K(V)擬合。由此設計出如圖4所示的助力曲線。可以看出,助力曲線隨著車速的增加,由直線型逐漸向下凹性增強的曲線型轉變,這與文獻[4-5]論證過的助力曲線幾何特征完全一致,驗證了所設計的助力函數的合理性。
3 聯合仿真試驗
3.1聯合仿真模型
將在MSC.ADAMS/CAR中建立的整車機械模型與Matlab中建立的PID控制器模型、電機模型、助力曲線模型進行聯合仿真,聯合仿真模型如圖5所示。
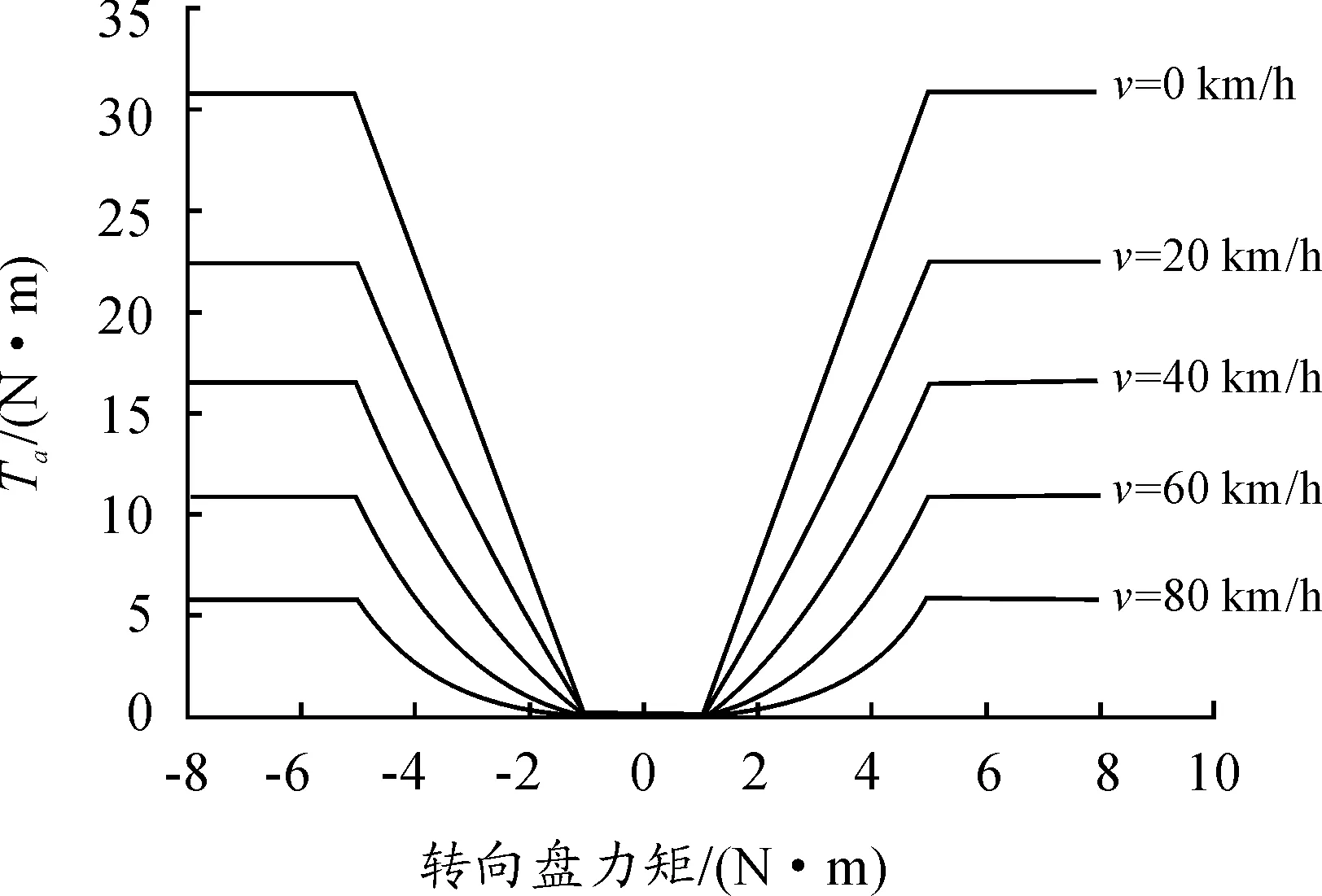
圖4 基于理想轉向盤力矩特性的助力曲線
3.2轉向輕便性試驗
參照國標GB/T6323.5—94《轉向輕便性試驗方法》,汽車以10km/h按雙紐線路徑運行1周,記錄無EPS和加入EPS后方向盤力矩隨方向盤轉角的變化關系。由圖6可知:加入EPS后轉向力大幅減小,由平均手力矩3.5N·m降低至2N·m。在較低車速下,裝備EPS系統的車輛具有很好的轉向輕便性。
3.3轉向靈敏度試驗
參照國標GB/T6323.2—94《轉向瞬態響應試驗》對轉向靈敏度進行評價。當車速達到80km/h后迅速轉動轉向盤至預定角度并維持不變。由圖7可知:加入EPS后系統穩定時間縮短至0.8s,超調量減小至1.1%,保證了汽車高速行駛的安全性。
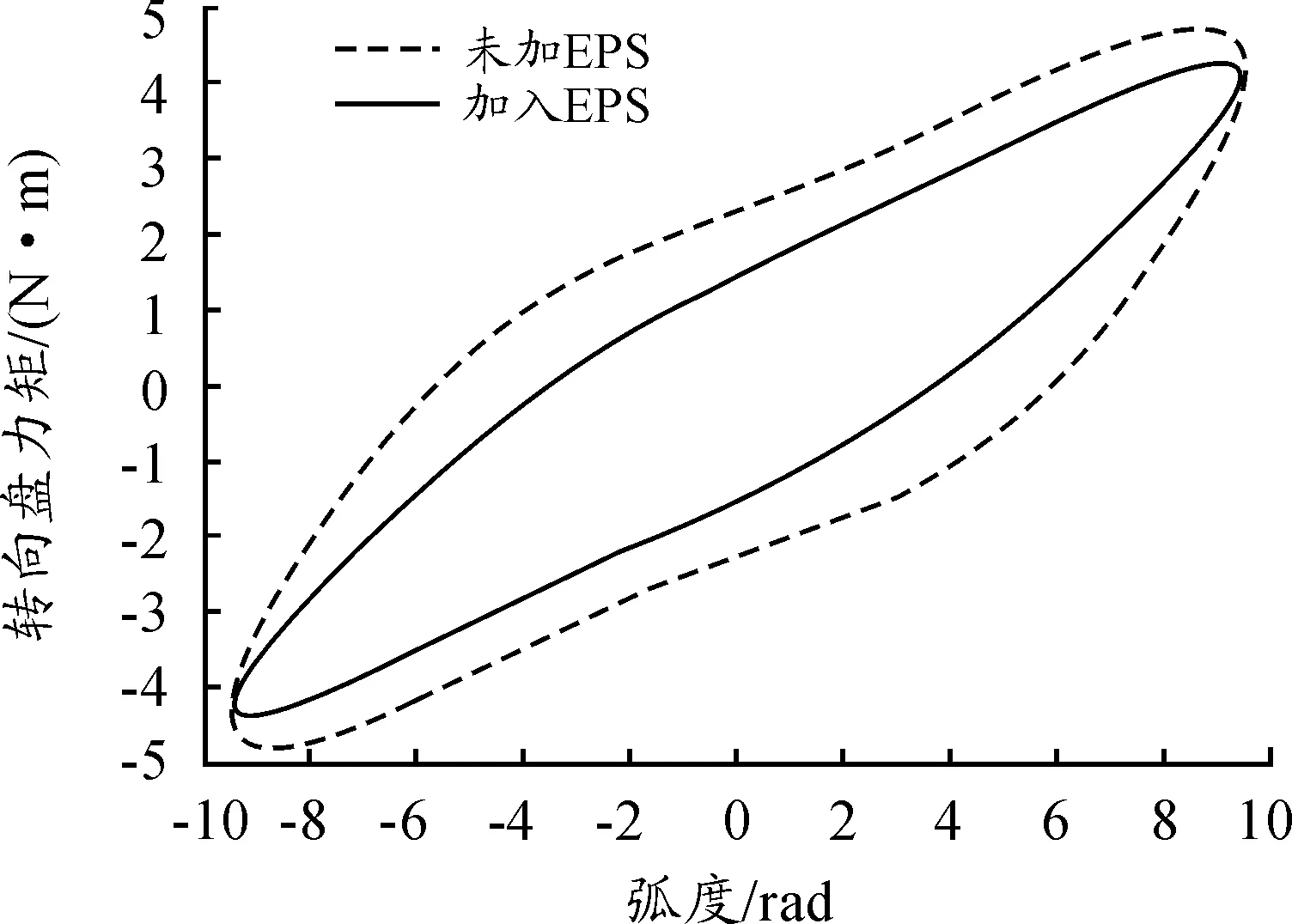
圖6 輕便性試驗仿真結果
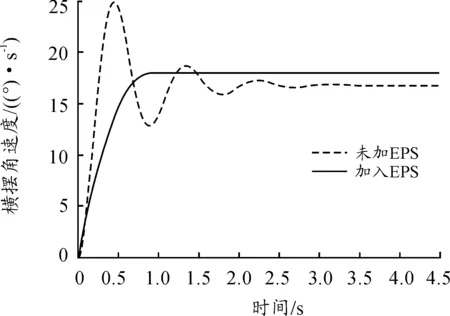
圖7 靈敏度試驗仿真結果
3.4路感驗證
由圖8幅頻特性可以看出:諧振峰值不變,頻帶增加。表明系統失真小、階躍響應上升時間短,調節時間短。由相頻特性可以看出:車輛的相位滯后角逐漸增大,系統響應有所變慢。
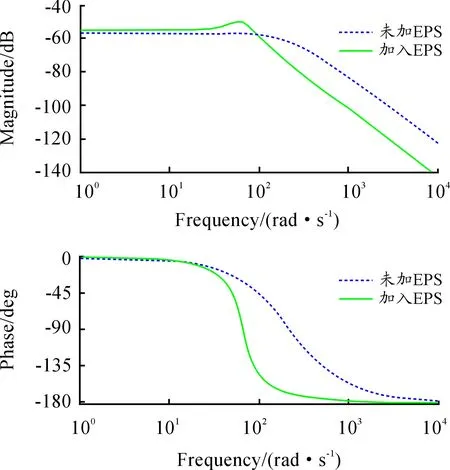
圖8 路感頻率響應特性
4 結束語
電動汽車EPS設計過程中的首要任務是對電機助力曲線的設計。理想的助力曲線應能根據不同的車速協調轉向輕便性與路感之間的矛盾。這種由直線型逐漸轉變為下凹性增強曲線型的方程更適合EPS系統,能做到低速及原地轉向時有比曲線型更好的轉向輕便性,高速時有比直線型更好的路感。通過對理想轉向盤力力矩特性的分析得到了低速段與高速段的駕駛員力矩,提出助力函數為指數函數形式。通過ADAMSCAR與Matlab聯合仿真試驗,驗證了該助力曲線的可行性。
[1]李莉.轉向力矩特性的分析與EPS助力控制策略的研究[D].上海:同濟大學,2006:39-44.
[2]陳偉.基于ADAMS的電動助力轉向系統助力特性研究[J].農業裝備與車輛工程,2009(7):11-14.
[3]宗長富,麥莉,王德平.基于駕駛模擬器的駕駛員所偏好的轉向盤力矩特性研究[J].中國機械工程,2007,18(8):1001-1005.
[4]任夏楠,鄧兆祥.駕駛員理想轉向盤力矩特性研究[J].中國機械工程,2014,25(16):2261-226.
[5]任夏楠,鄧兆祥.汽車EPS助力特性設計方法研究[J].機械科學與技術,2014,33(8):1225-1232.
[6]劉照.汽車電動助力轉向系統動力學分析與控制方法研究[D].武漢:華中科技大學,2005:65-74.
[7]歐陽偉,周兵,范璐.EPS新型助力特性曲線設計與研究[J].機械科學與技術,2013,32(11):1712-1716.
[8]何清華,何智成,方華,等.某微型客車EPS系統車速感應系數設計與評價研究[J].機械科學與技術,2014,33(3):404-408.
[9]LEEMH,HASK,CHOIJY,etal.Improvementofthesteeringfeelofanelectricpowersteeringsystembytorquemapmodification[J].JournalofMechanicalScienceandTechnology,2005,19(3):792-801.[10]張昕,施國標,林逸.電動助力轉向中間位置轉向感覺分析[J].公路交通科技,2009,26(7):139-148.
[11]趙景波,周冰,貝紹軼.電動汽車EPS系統阻尼工況Bang-Bang-PID控制[J].電機與控制學報,2011(11):95-100.
[12]趙景波,周冰,李秀蓮,等.電動汽車EPS助力特性的設計及試驗[J].電機與控制學報,2011(12):96-102.
[13]SHARP R S,GRANGER R.On car steering torques at parking speeds[J].J Automobile Engineering,2003,217(2):87-96.
[14]SALAANI M K,HEYDINGER G,PAUL G.Modeling and implementation if steering system feedback for the nation advanced driving simulator[R].USA:SAE Paper,2002.
[15]王鵬.汽車實時動力學仿真中轉向回正特征建模方法研究[D].長春:吉林大學,2008:14-23.
[16]余志生.汽車理論[M].5版.北京:機械工業出版社,2010:176-183.
(責任編輯劉舸)
Study on Design and Evaluation of Assisted Characteristics Curve for EPS
ZHANG Yong-hui1,WANG Yue1,CHEN Ding-yue2, SHEN Fu-lin2
(1.Vehicle Engineering Department, Xi’an Aeronautical University, Xi’an 710077, China; 2.School of Automobile, Chang’an University, Xi’an 710064, China)
We analyzed the assist characteristic of electric power steering of the vehicle. Under different speeds, the ideal steering wheel torque of driver was changed with the steering wheel angle and lateral acceleration. We studied the ideal steering wheel torque model and established the ideal steering wheel torque models in high and low speed range. The ideal steering wheel torque model parameters in low speed range and its influence factors were analyzed. The vehicle model was built by ADAMS/CAR and Matlab, and the speed responding assist characteristic curve of passenger car was drawn up, and then the process assisted characteristic curve of electric power steering system was formed. The result showed that the assist curve meets the requirements of the automobile steering characteristic.
electric vehicle; electric power steering system; ideal steering wheel torque; assist characteristic curve; mathematical models
2016-02-18
陜西省科技攻關項目(2015GY053)
張永輝(1982—),男,陜西人,講師,主要從事汽車電子控制技術研究,E-mail:19860399@qq.com。
format:ZHANG Yong-hui,WANG Yue,CHEN Ding-yue,et al.Study on Design and Evaluation of Assisted Characteristics Curve for EPS[J].Journal of Chongqing University of Technology(Natural Science),2016(9):33-37.
10.3969/j.issn.1674-8425(z).2016.09.005
U463
A
1674-8425(2016)09-0033-05
引用格式:張永輝,王悅,陳丁躍,等.電動汽車EPS助力曲線設計與評價研究[J].重慶理工大學學報(自然科學),2016(9):33-37.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
英語世界(2022年9期)2022-10-18 01:11:18
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
金橋(2020年9期)2020-10-27 01:59:44
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化(高中版.高考理化)(2020年3期)2020-05-30 12:26:32
商周刊(2017年17期)2017-09-08 13:08:58
光學精密工程(2016年6期)2016-11-07 09:07:19