
天津市三系統衛星定位地基增強系統及評價
2016-11-05 06:03:28于國良
中國房地產·學術版 2016年9期
摘要:天津市三系統多頻多模北斗地基增強系統從流動站兼容性測試、網絡RTK定位精度測試、網絡RTK長時間連續觀測精度測試、惡劣環境下網絡RTK定位精度測試等多個方面對系統的服務能力進行了測試。測試結果表明,天津市三系統多頻多模北斗地基增強系統可以穩定可靠地為用戶提供平面2-3厘米,高程優于5厘米的高精度位置服務,天津市三系統多頻多模北斗地基增強系統的順利建成,為我國北斗導航定位系統的推廣應用提供了寶貴的工程經驗。
關鍵詞:天津市,北斗地基增強系統,三系統,多頻多模
中圖分類號:P228 文獻標識碼:B
文章編號:1001-9138-(2016)09-0044-51 收稿日期:2016-07-11
1 引言
GNSS連續運行參考站系統(Continuously Operating Reference System,CORS),是在較大區域內根據客觀需求及條件,基于差分GNSS技術建立的連續運行參考站網絡,可以在較大區域內向大量用戶全自動實時提供高精度、高可靠性的位置信息服務和時間信息服務,是獲取空間數據和地理特征的現代信息基礎設施之一。
當前,我國絕大部分省市都已建成并運行著CORS系統,北斗地基增強系統的建設,一般在已有CORS系統的基礎上,更換升級三系統設備以及數據處理管理軟件,利用已有基礎設施開展北斗地基增強系統的建設,節約大量資金。
2 天津市北斗地基增強系統概況
天津市北斗地基增強系統是由天津市國土資源測繪和房屋測量中心牽頭組織,在原有的天津國土資源GPS專用網絡系統的基礎上,通過將天津市部分區域基準站硬件設備以及CORS中心系統軟件進行三系統升級改造,形成了覆蓋天津市靜海、津南、北辰以及濱海新區等地的兼容BDS/GPS/GLONASS的三系統多頻多模北斗地基增強系統。
2.1 天津國土資源GPS專用網絡系統
天津國土資源GPS專用網絡系統于2008年7月開建,2009年10月正式投入運行,是天津市國土資源和房屋管理的重要空間基礎設施,是支撐基礎測繪、“一張圖”建設與更新維護、土地利用監管、土地資源調查、權屬調查、登記發證等業務順利開展的重要技術手段,建設成果通過國家測繪地理信息局鑒定,獲得行業權威認可。
2.2 天津市北斗地基增強系統
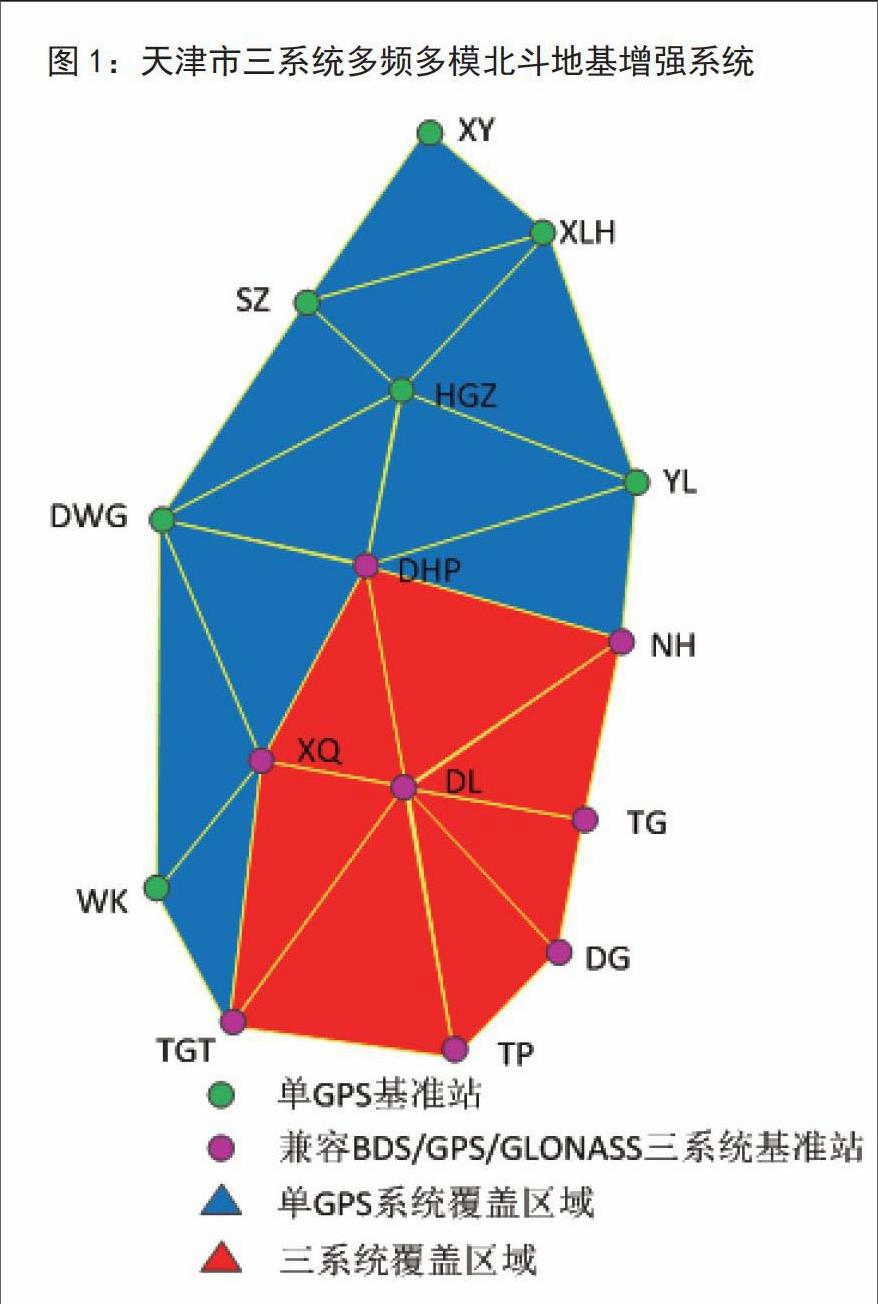
2012年8月至今,為大力推動北斗導航定位系統在國土資源和房屋管理等行業領域的應用。針對CORS系統使用需求較大的地區,采取優先升級的策略,有重點、分批次地將天津市津南、靜海等地的8個單GPS基準站升級為兼容BDS/GPS/GLONASS的三系統基準站設備,CORS中心軟件升級為東南大學自主研發的支持BDS/GPS/GLONASS的三系統融合解算軟件(EarthnetV2.0),升級后的天津CORS網型圖如圖1所示。
3 系統核心算法
天津市三系統多頻多模北斗地基增強系統軟件EarthNetV2.0是東南大學3S技術研發中心自主研發的高精度、多星座CORS系統軟件,其全面支持Ntrip協議以及RTCM標準差分協議,可為網絡RTK用戶提供實時厘米級精度的定位服務。軟件主要由數據播發、數據處理、用戶管理、基站管理和數據存儲等5個功能模塊組成,能實時獲取基準站衛星觀測信息、導航信息及移動終端用戶的坐標信息,通過基站間模糊度解算及區域大氣誤差建模等相關算法,最終提供移動終端用戶精確的定位信息。該軟件的主要算法包括:
(1)網絡RTK用戶定位服務:EarthNetV2.0利用Ntrip協議,支持用戶采用網絡RTK、網絡RTD、RTK、RTD等接入方式,以及RTCM2.3、RTCM3.1等差分數據協議類型,兼容不同流動站設備,并為不同流動站提供平面3厘米、高程5厘米的實時定位精度以及1厘米的事后解算精度,同時也提供分米級、亞米及1-3米多種精度差分服務。EarthNet2.0的厘米級網絡RTK是基于VRS的網絡差分系統,差分改正主要分為兩步:首先計算出虛擬參考站的偽距、載波相位觀測值;然后依據RTCM協議生成標準格式的載波相位差分改正數據,并通過系統數據通訊鏈路發給移動站實現高精度定位。
網絡RTK的VRS網絡差分基準站采用多頻多模GNSS接收機,至少由3個組成。因為基準站的精確坐標已知,故站星距可以精確求得,虛擬載波相位觀測值最關鍵的內容是精確估計GNSS信號與虛擬參考站之間的大氣延遲值,通過結合參考站數據的大氣延遲和位置信息建立區域誤差模型,然后進行內插得到虛擬參考站的相位觀測值:
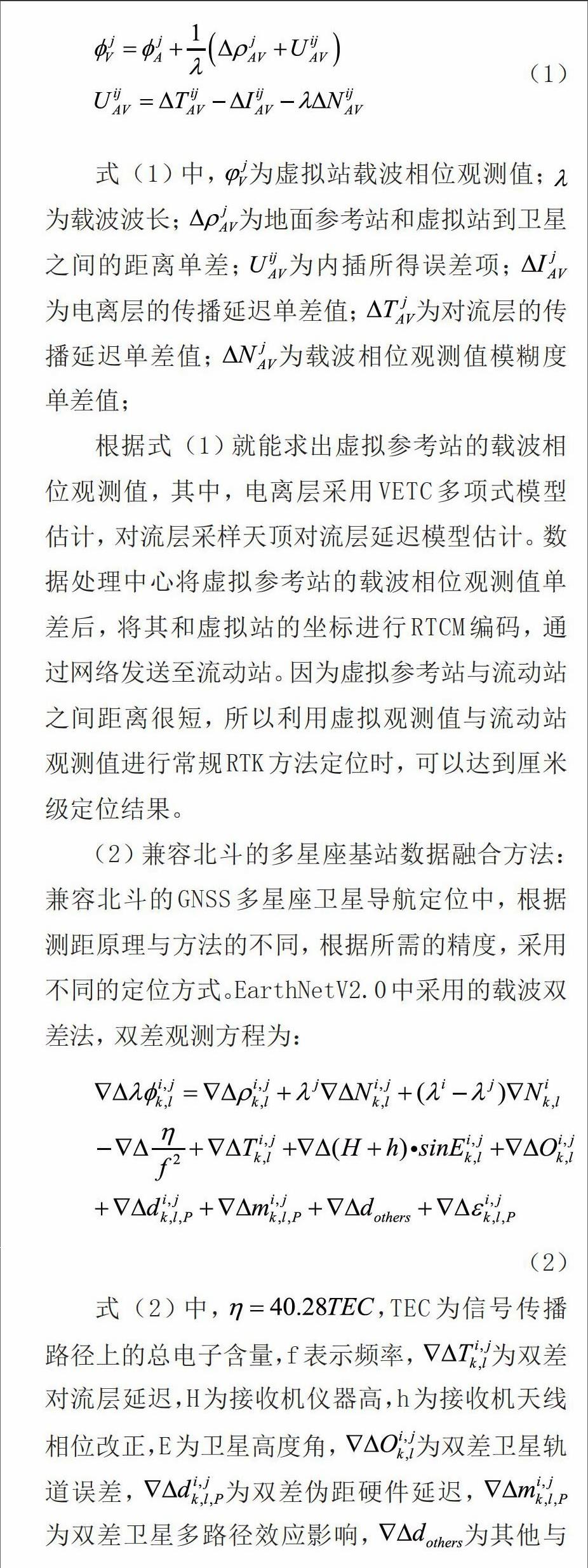
式(1)中,為虛擬站載波相位觀測值;為載波波長;為地面參考站和虛擬站到衛星之間的距離單差;為內插所得誤差項;為電離層的傳播延遲單差值;為對流層的傳播延遲單差值;為載波相位觀測值模糊度單差值;
根據式(1)就能求出虛擬參考站的載波相位觀測值,其中,電離層采用VETC多項式模型估計,對流層采樣天頂對流層延遲模型估計。數據處理中心將虛擬參考站的載波相位觀測值單差后,將其和虛擬站的坐標進行RTCM編碼,通過網絡發送至流動站。因為虛擬參考站與流動站之間距離很短,所以利用虛擬觀測值與流動站觀測值進行常規RTK方法定位時,可以達到厘米級定位結果。
(2)兼容北斗的多星座基站數據融合方法:兼容北斗的GNSS多星座衛星導航定位中,根據測距原理與方法的不同,根據所需的精度,采用不同的定位方式。EarthNetV2.0中采用的載波雙差法,雙差觀測方程為:
(2)
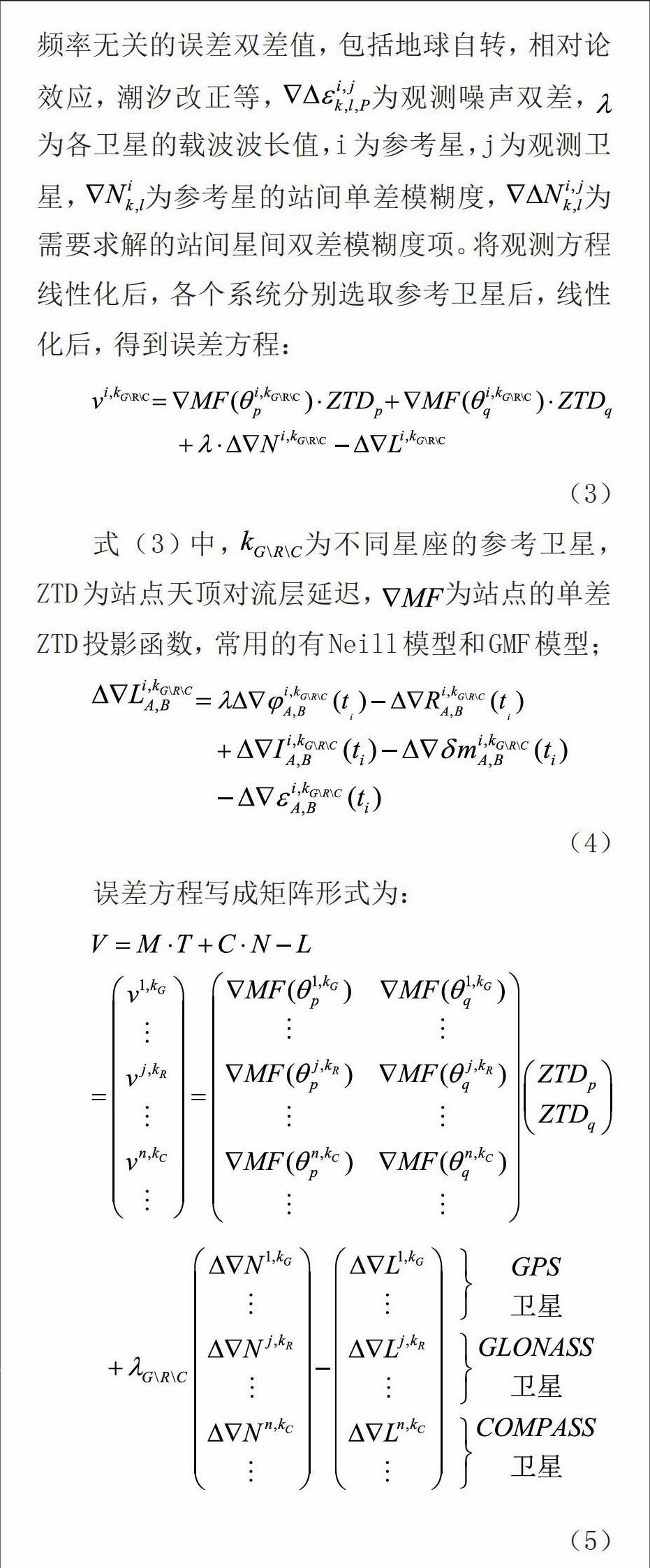
式(2)中,,TEC為信號傳播路徑上的總電子含量,f表示頻率,為雙差對流層延遲,H為接收機儀器高,h為接收機天線相位改正,E為衛星高度角,為雙差衛星軌道誤差,為雙差偽距硬件延遲,為雙差衛星多路徑效應影響,為其他與頻率無關的誤差雙差值,包括地球自轉,相對論效應,潮汐改正等,為觀測噪聲雙差,為各衛星的載波波長值,i為參考星,j為觀測衛星,為參考星的站間單差模糊度,為需要求解的站間星間雙差模糊度項。將觀測方程線性化后,各個系統分別選取參考衛星后,線性化后,得到誤差方程:
(3)
式(3)中,為不同星座的參考衛星,ZTD為站點天頂對流層延遲,為站點的單差ZTD投影函數,常用的有Neill模型和GMF模型;
(4)
誤差方程寫成矩陣形式為:
(5)
引入天頂對流層參數進行估計,當考慮天頂對流層模型時,方程無法用單歷元解算。所以需要多歷元解算,解算方法可以使用序貫最小二乘或者使用Kalman濾波模型。
EarthNetV2.0中,采用多星座融合實現定位,有效地增多了衛星數,改善了點位幾何精度因子,在長時間觀測中一直處于1-2之間,解決了部分時段GPS、GLONASS衛星少以及北斗分布不均勻等缺點。針對不同系統選擇適當的權值,彌補了北斗和GLONASS偽距精度的不足,提高了定位精度。
(3)CORS完備性監測:EarthNetV2.0具有一套完整的CORS系統完備性監測參數體系,從數據播發中心、數據處理中心、用戶管理中心、基站管理中心和數據存儲中心5個方面出發,根據各方面監測內容,結合CORS系統自身特點,對CORS系統完備性參數進行監測及發布,提出一套完備性監測指標體系、監測技術、參數播發機制。構建一套完整的CORS系統完備性監測參數體系及各項參數量化指標,實現了電離層的絕對變化、相對變化監測。提出了基線解算中一種基于觀測常量的粗差探測方法。實現了基于抗差估計的RAIM算法。構建大規模GNSS定位地面增強系統可靠性參數量化指標體系;突破參考站坐標框架監測技術,參考站坐標平面精度≤2厘米,高程精度≤3厘米;攻克了實時反映電離層變化情況的電離層模型,精度≤1TEC。
EarthNet2.0中,采用I95指數監測電離層活動情況,I95指數反映了電離層活動的強度(式6)。I95值根據每小時所有網絡參考站跟蹤的所有衛星的電離層改正數來計算,而最差的5%的數據會被拒絕,最高的值將會保存下來。
(6)
4 系統應用及精度評估
天津市三系統多頻多模北斗地基增強系統建成之后,需要對其系統服務能力(流動站用戶終端子系統)進行測試,測試主要包括4方面內容:流動站兼容性測試、網絡RTK定位精度測試、網絡RTK長時間連續觀測精度測試、惡劣環境下網絡RTK定位精度測試等,通過對定位結果進行分析,綜合評價天津市三系統多頻多模北斗地基增強系統的對外服務能力。
4.1 流動站兼容性測試
流動站兼容性測試主要為了檢測中心軟件EarthNetV2.0對不同廠家的RTK設備的兼容情況。采用的終端設備包括了國內外主流產品:天寶Trimble R8、中海達H32、iRTK、南方S82、華測i60等。
在天津市國土資源和房屋測量中心樓頂,通過用不同品牌流動站同步接入CORS系統20次,記錄達到固定解的時間,評價CORS系統中心軟件對流動站終端的兼容性。
由表1可以看出,各種品牌類型的流動站均可以快速、穩定的實現初始化,CORS系統中心軟件都可以很好地兼容國內外主流品牌的流動站設備。
4.2 網絡RTK定位精度測試
在三系統網元覆蓋區域均勻的選取測試點位,對網絡RTK定位的初始化時間、定位精度進行全面測試。其中臨時測試點13個,靜態測試點7個,最遠的點為河北滄州青縣,距離網外18千米。
選擇目前市場上大多數主流品牌的國內外設備接入系統,依次選取單GPS、GPS+GLONASS以及BDS+GPS+GLONASS掛載點接入CORS中心軟件EarthNetV2.0,對不同設備測試的結果(初始化時間、固定成功率、內外符合精度、外符合精度)進行統計分析,統計結果見表2。
由表2可以看出:三種不同掛載點流動站終端初始化時間基本保持在30秒以內,其中,GPS+GLONASS初始化速度最快,為18.9秒,三系統定位初始化時間長于GPS+GLONASS雙系統初始化時間,為20.7秒,可能是由于北斗GEO衛星運動緩慢,造成流動站終端解算變慢造成的。單GPS由于觀測衛星數太少,流動站初始化速度最慢。三系統定位初始化成功率最高,為100%,單GPS初始化成功率最低,為85%,GPS+GLONASS初始化成功率在90%。單GPS解算模式下平面內符合精度為7.9毫米,高程方向內符合精度為12.6毫米;GPS+GLONASS解算模式下平面內符合精度為7.6毫米,高程方向內符合精度為13.2毫米;三系統解算模式下平面內符合精度為7.2毫米,高程方向內符合精度為10.8毫米。無論是平面還是高程方向,三系統定位內符合精度都要優于單GPS以及GPS+GLONASS內符合精度。單GPS解算模式下平面外符合精度為14.9毫米,高程方向外符合精度為35.4毫米,GPS+GLONASS解算模式下平面外符合精度為15.4毫米,高程方向外符合精度為37.3毫米,三系統解算模式下內符合精度為11.7毫米,高程方向內符合精度為42.1毫米,達到了平面2-3厘米,高程方向優于5厘米的CORS系統使用要求。
4.3 網絡RTK長時間連續觀測精度測試
網絡RTK長時間連續觀測精度測試。網絡RTK長時間連續觀測可以有效地檢驗觀測時段內網絡RTK差分改正數據的穩定性。
在天津市國土資源測繪和房屋測量中心樓頂點位進行長時間連續觀測并記錄點位坐標,在1秒采樣率的情況下,采用三系統解算模式,通過連續觀測1個小時,記錄3600個歷元的點位坐標,分析網絡RTK定位的穩定性以及精度。
圖2為天津市國土資源測繪和房屋測量中心樓頂點位,連續觀測1小時定位結果轉換到西安80坐標系后點位分布。
由圖2可以看出,在三系統解算模式下,網路RTK連續觀測3600歷元,點位分布非常集中,平面精度在3厘米以內,證明了CORS系統定位的連續性與穩定性。
4.4 惡劣環境下網絡RTK定位精度測試
惡劣環境下網絡RTK定位精度測試。在建筑物密集、樹蔭遮擋等地區,由于建筑物以及樹蔭的遮擋,導致了基準站與流動站見共視衛星過少,造成了流動站無法固定、流動站偽固定等現象。
為了測試北斗地基增強系統在建筑物密集區的服務能力,評價北斗地基增強系統的空間可用性,選取天津市區建筑密集區(天空可見度小于60%)進行點位精度測試。分別采用單GPS、GPS+GLONASS以及三系統定位解算模式,在采樣率為1秒的情況下,連續觀測120個歷元,記錄點位坐標。圖3為將點位坐標轉換成西安80坐標系后點位分布情況。
由圖3可以看出,三系統解算模式下點位最集中,點位精度最高,在3厘米以內。單GPS定位大部分情況下點位比較集中,但是也有部分點位定位精度過3厘米,而GPS+GLONASS定位結果比較分散,有的點位精度超過10厘米,原因是GLONASS比較容易受到環境影響。
通過本次建筑密集區的點位測試分析可以看出,即使在觀測條件比較惡劣的條件下,三系統定位解算仍然能夠保持比較高的定位精度。
5 結論
通過從流動站兼容性、網絡RTK定位精度、網絡RTK長時間連續觀測精度、惡劣環境下網絡RTK定位精度等4個方面對天津市北斗地基增強系統進行了全面測試。測試結論如下:
(1)在流動站兼容性方面,天津市三系統多頻多模北斗地基增強系統可以很好地兼容國內外主流品牌的流動站,流動站平均初始化時間在35秒以內。
(2)在網絡RTK定位精度方面,在平面上,無論是點位坐標的內符合精度還是外符合精度,三系統解算模式都優于單GPS與GPS+GLONASS定位解算模式。在高程方向,三系統解算模式的內符合精度最優,而外符合精度低于GPS和GPS+GLONASS解算模式。在初始化成功率方面,單GPS、GPS+GLONASS以及三系統解算模式的初始化成功率分別為85%,90%以及100%,三系統解算模式,流動站初始化成功率高于其他兩種解算模式。
(3)在網絡RTK長時間連續觀測精度測試方面,三系統解算模式下,點位分布非常集中,平面內符合定位精度在2厘米以內。
(4)惡劣環境下網絡RTK定位精度測試方面,三系統解算模式下,點位分布非常集中,平面定位精度在3厘米以內,單GPS解算模式下部分點位坐標精度超出了3厘米,GPS+GLONASS解算模式下部分點位精度超過10厘米。
天津市三系統多頻多模北斗地基增強系統的投入使用,提高了我國擁有自主知識產權的北斗衛星定位系統在天津市國土資源和房屋管理領域的應用水平,解決了在城區內建筑物密集、林木茂盛對單GPS、GPS+GLONASS產生的影響,流動站定位速度和精度均有明顯的提升。在天津市國土資源和房屋管理領域應用后,取得了良好的社會效益和經濟效益,得到系統內廣大用戶的普遍好評。
參考文獻:
1.劉經南 劉暉 鄒蓉.建立全國CORS更新國家地心動態參考框架的幾點思考.武漢大學學報.2009.34(11)
2.劉喜.大慶CORS系統精度(RTK)測試與分析.測繪與空間地理信息.2011.34(4)
3.江蘇省北斗衛星應用產業研究院有限公司.江蘇省測繪工程院.東南大學.江蘇北斗地基增強系統一期工程技術總結報告.2013
4.潘樹國 王慶 毛薇.基于VRS的GPS網絡RTK差分改正方法.中國慣性技術學報.2008.03
5.葛茂榮 劉經南.GPS定位中對流層折射估計研究.測繪學報.1996.04
6.黃丁發 熊永良 袁林果.全球定位系統(GPS)——理論與實踐.西安交通大學出版社.2006
7.沈雪峰 高成發 潘樹國.一種序貫平差中長基線模糊度的解算方法.測繪科學.2012.37(2)
8.Niell,A.E.Global Mapping Functions for the Atmosphere Delay at Radio Wavelengths,J.Geophys.Res.,1996.101
9.Boehm J,Niell A,Tregoning P,etal Globalmapping Function(GMF):A Newempirical Mapping Function Based on Numerical Weather Model Data.Geophys Res Lett 2006.33
10.楊元喜.自適應動態導航定位.測繪出版社.2006
11.閆志躍 喻國榮 潘樹國等.穩健估計方法用于接收機自主完備性監測的比較.中國衛星導航系統管理辦公室.第四屆中國衛星導航學術年會論文集——S5衛星導航增強與完好性監測.中國衛星導航系統管理辦公室.2013.04
12.秘金鐘 李毓麟.RAIM算法研究.測繪通報.2001.03
13.Wanninger L.Ionospheric Disturbance Indices for RTK and Network RTK Positioning[C].Proceedings of the National Technical Meeting of the Satellite Division of the Institute of Navigation,ION GPS 2004(September 2004,Long Beach,USA).2004.2849-2854
14.楊徉 潘樹國 汪登輝.北斗地基增強系統軟件(EarthNet2.0)及其應用.測繪通報.2014.10
15.張周平 劉忠.城市CORS的測試內容與方法研究.測繪技術裝備.2010.12(3)
作者簡介:
于國良,天津市國土資源測繪和房屋測量中心主任。
中國房地產·學術版2016年9期