箔條質心干擾的艦艇機動決策模型*
2016-11-07 05:41:10孫衛東
計算機與數字工程 2016年10期
關鍵詞:艦艇
孫衛東 王 勃,2
(1.海軍大連艦艇學院作戰軟件與仿真研究所 大連 116018)(2.92819部隊 大連 116018)
?
箔條質心干擾的艦艇機動決策模型*
孫衛東1王勃1,2
(1.海軍大連艦艇學院作戰軟件與仿真研究所大連116018)(2.92819部隊大連116018)
依據質心干擾基本原理,分析質心干擾成功的基本條件,指出合理的艦艇機動是保證質心干擾效應的關鍵;根據質心干擾的基本過程,建立質心干擾艦艇機動模型;通過仿真分析驗證模型的有效性。建立的艦艇機動決策模型,將復雜的指揮決策轉化為量化計算方法,為指揮員在各種情況下均能做出快速、精確的機動決策提供可靠保障。
質心干擾; 艦艇機動; 決策模型
Class NumberTP391
1 引言
箔條質心干擾是指在導彈末制導雷達已經跟蹤上目標艦以后,利用雷達是跟蹤目標能量質心這一特點,在雷達的跟蹤范圍內、目標艦的周圍布放假目標(箔條誘餌),使雷達跟蹤真、假目標的能量中心,破壞敵制導雷達對目標艦的穩定跟蹤,最后在一定條件下,促使雷達從跟蹤質心轉向跟蹤假目標,這一干擾方式稱為質心干擾[1]。
正確的艦艇機動方式是決定質心干擾是否成功的重要條件。干擾彈發射后,在形成質心效應的過程中,艦艇應選擇合適的航向與航速,盡早擺脫敵導彈跟蹤。艦艇機動方式與敵導彈來襲的方向與速度、當前海區的風向與風速、本艦干擾彈的發射方向密切相關。如果本艦采用軟硬武器協同抗擊方式,則艦艇機動還應該考慮是否會影響到艦載導彈或艦炮武器系統的正常使用。可見,箔條質心干擾的艦艇機動是個復雜的指揮決策問題,需要從原理上分析質心干擾艦艇機動的數學本質,建立艦艇機動的決策模型,給出可精確量化計算的機動決策方法,為切實發揮質心干擾的效能,保證艦艇整體的協同抗擊能力提供合理依據[2~3]。
2 質心干擾原理
質心干擾的作戰對象是處于跟蹤段的敵導彈末制導雷達。當有目標(無論真假)同時位于跟蹤雷達的跟蹤范圍內時,跟蹤雷達的電軸將指向這幾個目標的雷達截面積中心(即質心,反射能量中心)。根據這一原理,質心干擾用于干擾導彈末制導雷達的跟蹤段,使導彈從跟蹤艦艇的狀態轉到跟蹤真假目標的能量中心(質心),從而起到保護艦艇的作用[4]。質心干擾的原理示意圖如圖1所示。

圖1 質心干擾原理示意圖
圖中,目標艦與箔條假目標均在導彈末制導雷達跟蹤波束內,目標艦雷達截面積為δ1,假目標雷達截面積為δ2。以導彈當前位置點M點為基準,真假目標之間的夾角為θ1,導彈末制導雷達跟蹤真假目標形成的質心點Z點與目標艦的夾角為θ2,則:
從上式可以看出,箔條假目標雷達截面積越大,質心與目標艦的夾角就越大,導彈末制導雷達的跟蹤點就離目標艦越遠。
通過分析質心干擾的原理可以看出,成功的質心干擾要使敵導彈跟蹤雷達完成兩個轉移過程:一是要使雷達由單獨跟蹤艦艇轉到跟蹤艦艇和假目標共同形成的質心點上去;二是要使雷達跟蹤質心點轉移到單獨跟蹤假目標,即艦艇要脫離雷達的跟蹤,這才能使干擾成功[5]。
完成第一個轉移過程需要具備的條件:
假目標所處的位置,要在末制導雷達的跟蹤范圍內;假目標的雷達截面積要遠大于艦艇的雷達截面積,一般要大于2~3倍為好;假目標從發射到形成有效干擾云的時間要短,而留空時間要長;導彈的來襲方向相對于艦艇應處于有利的舷角[6]。
完成第二個轉移過程需要具備的條件:
質心效應形成后,艦艇應選擇正確的方向機動,盡早擺脫敵導彈末制導雷達的跟蹤;同時,干擾彈的發射方向應有利于艦艇在最短時間內脫離導彈跟蹤[7]。
綜上所述,干擾彈的發射方向和艦艇的機動方向,是質心干擾成功的重要條件。而干擾彈發射后在空中形成的干擾云受海面常值風的影響比較大,這個時候的艦艇機動就顯得更為重要,合理的艦艇機動(航向、航速)是質心干擾能否成功的關鍵。
3 干擾機動決策模型
首先,分析質心干擾真假目標的相對運動關系。如圖所示。圖中,OT為艦艇速度矢量,OF為海面常值風矢量,二者合成為甲板風速度矢量OG,OG也是箔條假目標速度矢量,OZ為質心速度矢量,OM為來襲導彈速度矢量,OM與OG的合成速度矢量為MG。假目標的角速度為ω1,質心的角速度為ω2。其中:
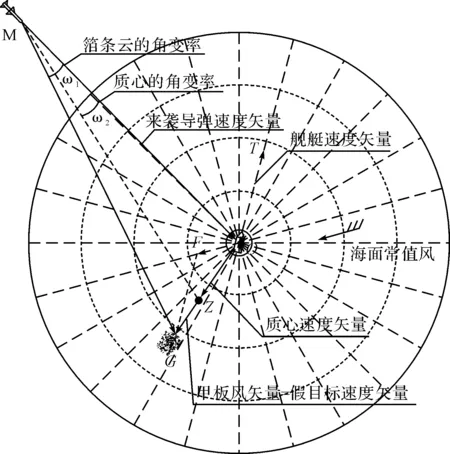
圖2 質心干擾真假目標相對運動關系示意圖
質心干擾的過程如圖3所示。目標艦釋放假目標后,由于質心效應,導彈末制導雷達由跟蹤目標艦轉向跟蹤艦艇和假目標共同形成的質心點Z[8]。此時,導彈、艦艇和假目標同時運動,如果艦艇的運動方向正確,艦艇會先于假目標離開末制導雷達的跟蹤波門,末制導雷達將只跟蹤假目標,干擾成功[9]。

圖3 質心干擾的過程
圖中,v1為假目標的移動速度,v2為質心的移動速度,vm為導彈的來襲速度,L為艦艇的物理長度(非雷達截面積),D為導彈的當前距離,d為質心干擾最小有效距離[10],α為導彈末制導雷達的方位跟蹤波門的角度[11]。由上述質心干擾的過程可得,干擾成功的條件如下:
ω1=f(v1)
t=(D-d)/vm
v1=[δ2/(δ1+δ2)]v2
v2×t≥L
(ω1-ω2)×t≤α/2
式中,f表示由假目標速度到角速度的函數轉換,由兩步三角函數轉換組成。在圖2的ΔOFG中,通過三角函數轉換,由目標艦速度矢量OT和海面常值風矢量OF,得到假目標速度矢量OG;在ΔOMG中,通過三角函數轉換,由假目標速度矢量OG和來襲導彈速度矢量OM,得到假目標相對導彈的角速度ω1。
那么ω1的取值范圍為
只有確保ω1在這個區間內,才能保證假目標始終在導彈末制導雷達跟蹤波門內,且導彈到達質心干擾最小有效距離時,已經偏離艦艇至安全距離。
4 仿真分析
某艦艇正以航向350°、航速18節航渡,突然遭到敵方反艦導彈襲擊,敵反艦導彈方位50°、速度330m/s。海面常值風風向290°、風速7m/s。艦艇按照防空預案進行軟硬武器協同抗擊,在導彈距離25km處,艦載雷達偵測到末制導雷達信號,艦載指控系統依據實時態勢,給出質心干擾決策;指揮員適時發射箔條彈,并配合進行艦艇機動。
上述態勢條件下,艦艇航向在0~360°范圍內ω1的取值情況如下:
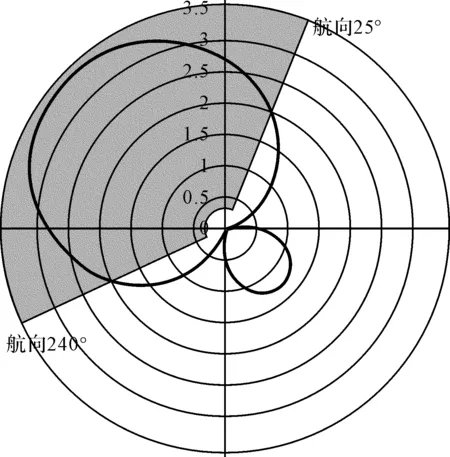
圖4 一般海情下假目標相對導彈角速度
假設艦艇與質心假目標雷達截面積的大小比為1∶2,艦艇的實際物理長度為200m,來襲導彈末制導雷達跟蹤方位跟蹤角為5°。由第3節給出的質心干擾機動模型可得,確保質心干擾成功的ω1取值范圍為[2,3.7]。在這個取值范圍內的航向范圍如圖4中陰影覆蓋部分,即質心干擾的合理艦艇機動航向范圍為[240°,25°]。
假設當時海面常值風風速很大,達到20m/s。此時ω1的取值情況如下:

圖5 高海情下假目標相對導彈角速度
為確保質心效應,艦艇航向范圍如圖5中虛線標出的三個區間。其中,航向范圍為[100°,170°]的區間與導彈來襲方向呈垂直態勢,是艦艇應當執行的航向區間。可見,高海情情況下,如果不得以必須發射質心干擾,則應根據實際情況采取順風機動的方式進行規避。
5 結語
通過對高海情情況下質心干擾艦艇機動實例的計算,可以看出,傳統的經驗粗放式的指揮決策方式,不能完全適應多種復雜情況。質心干擾的艦艇機動模型從原理上揭示了質心干擾及其規避機動的數學本質,將復雜的指揮決策轉化為量化計算方法,為保證指揮員在各種情況下均能做出快速、精確的指揮決策提供科學、合理的依據。
[1] 胡劍光,朱正中.艦載電子戰系統質心干擾作戰使用研究[J]. 艦船電子工程,2005(6):57-59.
HU Jianguang, ZHU Zhengzhong. Research on Centroid Jamming Combat of Shipborne Electronic Warfare System[J]. Ship Electronic Engineering,2005(6):57-59.
[2] 錢進,張金華.箔條質心干擾發射機動決策仿真[J].光電技術應用,2005(6):68-71.
QIAN Jin, ZHANG Jinhua. Operational Simulation on Decision of Chaff Launching in Centroid Jamming Mode and Ship Maneuvering[J]. Electro-Optic Technology Application,2005(6):68-71.
[3] 趙威,陳晨,陳戎.箔條質心干擾發射舷角決策仿真研究[J].艦船電子對抗,2010(4):40-42.
ZHAO Wei, CHEN Chen, CHEN Rong. Research into The Decision-making Simulation of Launching Relative Bearing of Chaff Centroided Jamming[J]. Shipboard Electronic Countermeasure,2010(4):40-42.
[4] 李海浩,李海濤,朱寧龍.箔條質心干擾仿真模型研究[J].電子信息對抗技術,2010(1):52-55.
LI Haihao, LI Haitao, ZHU Ninglong. Simulation Model on Chaff Centroid Jamming[J]. Electronic Information Countermeasure Technology,2010(1):52-55.
[5] 湯永濤,王國恩,林鴻生.箔條質心干擾抗反艦導彈效果評估及機動研究[J].航天電子對抗,2012(4):1-3.
TANG Yongtao, WANG Guoen, LIN Hongsheng. Effect evaluation of chaff centroid jamming for anti-ship missile and move model[J]. Space Electronic Countermeasure,2012(4):1-3.
[6] 熊勤,盧景雙,周瑞.質心干擾的應用研究[J].艦船電子對抗,2009(4):28-30.
XIONG Qin, LU Jingshuang, ZHOU Rui. Research into The Application of Centroid Jamming[J]. Shipboard Electronic Countermeasure,2009(4):28-30.
[7] 傅妤華,張波,王斌.大型艦艇箔條質心干擾防御反艦導彈仿真[J].火力與指揮控制,2014(12):100-103.
FU Yuhua, ZHANG Bo, WANG Bin. Research into Simulation of Chaff Centroid Jamming in Anti-missile Campaign of Warship[J]. Fire Control & Command Control,2014(12):100-103.
[8] 竇心連,李寒梅.艦載質心干擾建模分析與仿真試驗[J].光電技術應用,2006(6):65-68.
DOU Xinlian, LI Hanmei. Shipboard Centroid Jamming Modeling Analysis and Simulation Test[J]. Electro-Optic Technology Application,2006(6):65-68.
[9] 韓偉,李寒梅.質心干擾對抗多方向導彈齊射的戰術研究[J].艦船電子對抗,2009(5):33-35.
HAN Wei, LI Hanmei, ZHOU Rui. Tactics Study of Centroid Jamming Confronting with The Multi-direction Missile Salvo Firing[J]. Shipboard Electronic Countermeasure,2009(5):33-35.
[10] 陳超,沙基昌,張正強.無源質心干擾模型及末制導雷達開機策略[J].火力與指揮控制,2010(5):13-15.
CHEN Chao, SHA Jichang, ZHANG Zhengqiang. Study on Chaff Centroid Jamming Model and the Tactic of Detecting Distance of the Terminal Guidance Radar[J]. Fire Control & Command Control,2010(5):13-15.
[11] 周璽,周常堯,曹焱.基于命中概率的箔條質心干擾反導能力研究[J]. 指揮控制與仿真,2007(5):52-55.
HAN Wei, LI Hanmei, ZHOU Rui. Research on Antimissile Ability Under Chaff Centroid Jamming Based on Hitting Probability[J]. Command Control & Simulation,2007(3):52-55.
Ship Maneuvering Decision Model of Chaff Centroid Jamming
SUN Weidong1WANG Bo1,2
(1. Operation Software and Simulation Institute, Dalian Naval Academy, Dalian116018) (2. No. 92819 Troops of PLA, Dalian116018)
According to the principle of centroid jamming, the basic condition for success of centroid jamming is analyzed. Then it is pointed out that the reasonable ship maneuver is the key to ensure the effect of chaff centroid jamming. Ship maneuvering model of centroid jamming is established according to the basic process of centroid jamming, which is verified availability through the simulation analysis. The ship maneuvering decision model is established, which transforms the complex command decision into the quantitative calculation method, which can provide the reliable guarantee for the commanders to make fast and accurate decision.
centroid jamming, ship maneuvering, decision model
2016年4月16日,
2016年5月21日
中國博士后科學基金項目(編號:2014M562557)資助。
孫衛東,男,博士,助理研究員,研究方向:海軍戰術與作戰仿真。王勃,男,博士后,工程師,研究方向:系統工程與作戰仿真。
TP391
10.3969/j.issn.1672-9722.2016.10.015
猜你喜歡
小學生學習指導(小軍迷聯盟)(2023年5期)2023-05-29 08:13:18
環球時報(2022-12-30)2022-12-30 15:15:00
軍事文摘(2022年13期)2022-08-27 01:26:26
鳳凰動漫(軍事大王)(2022年3期)2022-06-17 01:46:36
艦船科學技術(2022年5期)2022-04-19 10:58:46
軍事文摘(2021年21期)2021-11-14 10:14:56
軍事文摘(2017年24期)2018-01-19 03:36:16
兵器知識(2017年10期)2017-10-19 19:31:38
軍事體育學報(2014年3期)2014-02-27 16:00:16
船海工程(2013年6期)2013-03-11 18:57:37