基于艦炮供彈系統控制時序的電氣化控制方案探究*
2016-11-07 06:56:37季杰韓峻
艦船電子工程 2016年10期
關鍵詞:系統
季 杰 韓 峻
(1.海軍工程大學 武漢 430033)(2.92721部隊 舟山 316000)
?
基于艦炮供彈系統控制時序的電氣化控制方案探究*
季杰1,2韓峻1
(1.海軍工程大學武漢430033)(2.92721部隊舟山316000)
論文基于艦炮供彈系統的控制時序,提出了一種用電信號代替傳統機械化傳動控制方式的電氣化供彈方案,并設計了一套電氣化供彈模擬器,運用C8051F020單片機控制LED燈對艦炮供彈系統進行了彈位運動模擬,加入時序控制和供彈結構邏輯控制模擬,實現了對整個供彈程序進行檢測、判斷、控制和人機交互等功能。
供彈系統; 時序控制; 模擬器; 電氣化控制
Class NumberTH12
1 引言
艦炮是艦艇最基本的武器之一,而供彈系統作為艦炮武器的重要組成部分,其可靠性、擴展性和先進性對整個艦炮的性能有著至關重要的影響[1]。目前國內在役的大、中口徑艦炮供彈率較低,持續打擊能力較差,導致艦炮的作戰威力大打折扣,為此,建立一個自動化程度高、性能可靠的艦炮供彈系統具有重要意義[2]。本文基于供彈系統時序關系,嘗試用電信號代替傳統的機械化傳動控制方式,為艦炮的電氣化控制做了初步探究。
2 供彈系統的結構組成及時序分析
2.1供彈系統主要結構
艦炮供彈系統負責把彈藥從底層艙室運送至炮塔處,主要包括存儲單元、轉運單元、提升單元和控制單元。存儲單元負責炮彈的存儲,轉運單元負責炮彈的水平轉移,提升單元負責炮彈豎直方向的運動,控制單元負責控制各個動作的順序,使之能互相協調[3~4]。供彈系統先進與否對艦炮威力大小至關重要,AK-176是俄羅斯一款設計較為先進的艦炮[5],本文以此為研究對象,其采用左右交替供彈,因而供彈系統分為左、右兩個結構相同部分,這兩部分通過機械傳動鏈接起來,并從減速箱獲得動力。供彈系統主要結構如圖1所示。
2.2供彈系統時序分析
傳統的機械化供彈是一個由各結構部件通過機械嚙合進行的復雜聯動過程,既有傳動的銜接,也有時序的重疊,其機構聯動過程[6~7]如下(以左側供彈過程為例):
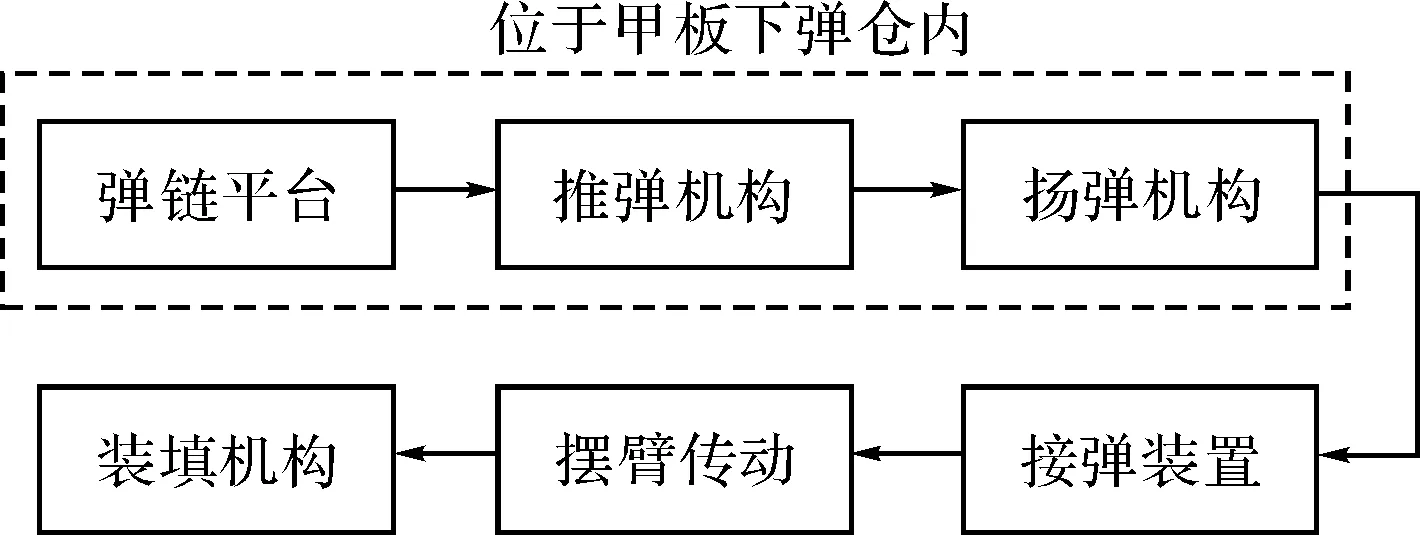
圖1 俄羅斯AK-176毫米艦炮供彈系統結構
初始狀態,輸彈槽、接彈裝置和揚彈機口處各有一發彈,左右壓彈機在初始位,炮門打開,供彈電機啟動,供彈減速箱脫開,揚彈機轉換手柄在結合位。
接到擊發指令后,帶彈的輸彈槽下降輸彈入膛關門擊發,擊發后火炮后坐,撥動左壓彈機,后坐位移大于340mm時壓彈機撥動結束,開始壓彈,當壓彈機返回初始位時壓彈機撥桿與搖架上的杠桿相作用,通過桿系把運動傳到供彈結合結構,使左供彈減速箱結合,左側供彈系統開始工作。并在同一供彈周期內完成下列動作:左擺臂抬起把左接彈裝置內的彈送到左裝填機構末端位;左揚彈機把其入口處的炮彈提升到接彈裝置內;彈鏈開始運動并把彈送到推彈位;當彈鏈停止運動后,推彈器把推彈位的這發彈推入揚彈機內,推彈器在彈簧的作用下返回;當擺臂降下時抓住揚彈機新提升進來的炮彈;當供彈循環完成后借助供彈脫開機構使供彈減速箱脫開,左側供彈系統停止運動。
根據同一供彈周期內完成的動作,補供彈任務可分解為以下五段子系統[8]:首先考慮炮彈在彈鏈中的運動,時間為T1;再考慮推彈過程,時間為T2,設推彈的推出和復位時間相同,分別為t21和t22,則有T2=t21+t22;接下來是揚彈過程,時間T3;然后是擺彈過程,由于射角不同,以擺彈的兩個極限角度分別研究,射角范圍-15°~+85°,由擺角β與射角φ關系β=97°-φ可知,擺角的兩個極限角度為112°和12°,但擺臂的角度及所用時間差異較小,這里不做深入分析,設擺動到壓彈口t41和擺回到接彈裝置t42,整個擺彈時間為T4,則有T4=t41+t42;最后是壓彈過程,時間為T5。
查閱全炮循環圖數據可知:T1=0.74s,T2=0.16s,T3=0.65s,T4=0.71s,T5=0.15s,整個供彈周期為0.96s。為了便于觀察和描述,把時間軸換算成角度軸,一個供彈周期相當于角度盤一周360°,則1°=0.96/360=0.002667s,通過換算可以得到T1=277°,T2=60°,T3=243°,T4=266.3°,T5=56.2°。設模擬時長為720°,可得到供彈時序角度盤轉動圖如圖2所示。
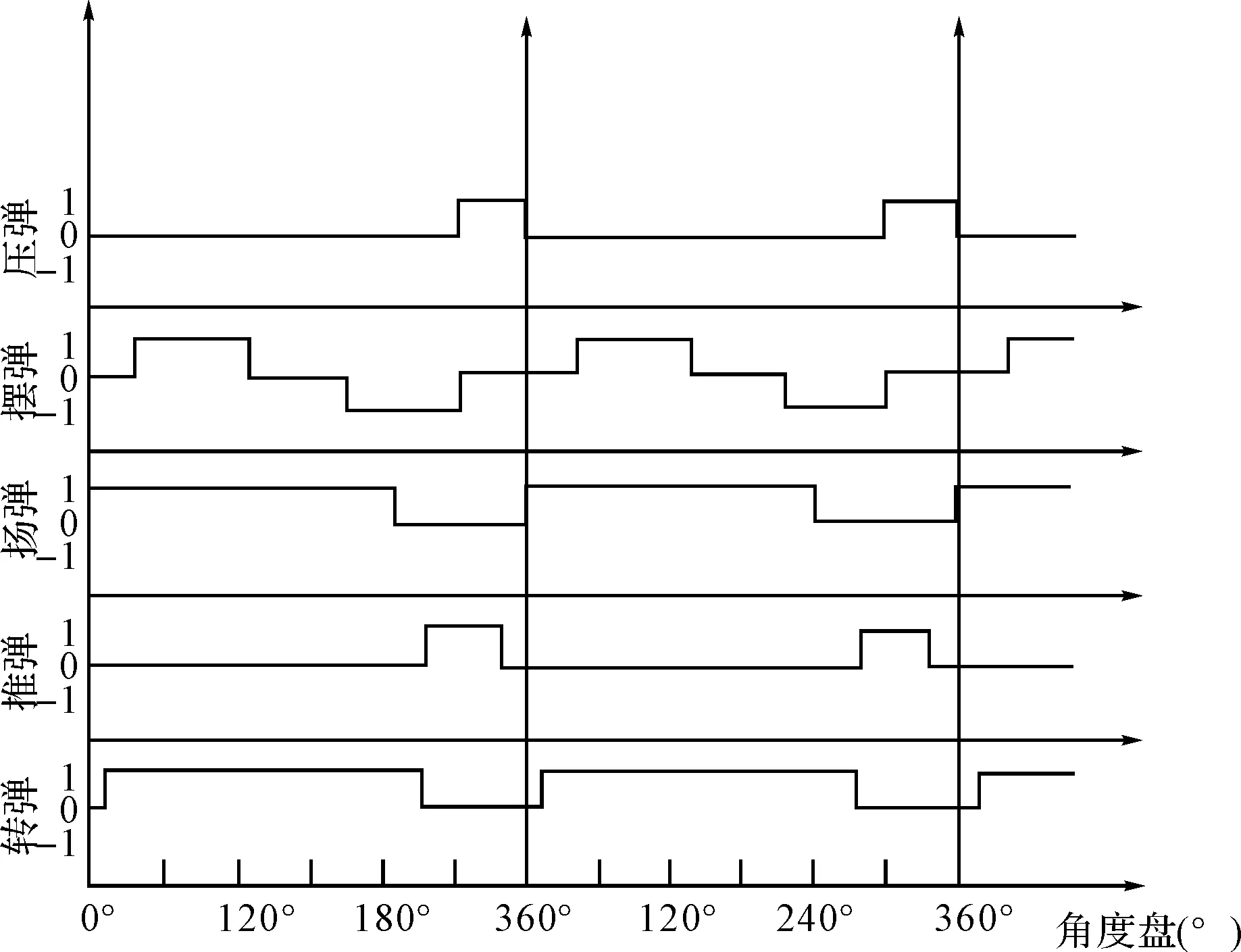
圖2 供彈時序角度盤轉動圖
3 供彈系統電氣化控制方案
3.1基于供彈時序的電氣化控制思路
傳統的機械化控制以減速箱為唯一動力源,供彈過程中通過復雜的機械嚙合將動力傳輸至各裝置,同時實現各部件的聯動。電氣化控制將電信號代替機械傳動,主要部件(轉彈、推彈、揚彈、擺彈、壓彈)配置獨立電機實現動力源分散,系統根據供彈時序分別對各動力源進行邏輯控制,從而實現各相對獨立的子系統進行協調運作。
3.2電氣化控制的主要優勢
1)系統結構緊湊,占用面積少
電氣化控制的最大特點是將供彈系統的各部件從復雜的機械傳動結構中解脫出來,實現硬件層面的相對獨立,由系統統一根據時序發出的電信號進行配合工作。用電纜代替機械傳動部件,可以將艦炮的總體布局設計得更為緊湊,占用面積減少。
2)容易定位故障,維修快速便捷
機械化供彈的硬件是一個整體結構,牽一發而動全身,任何一個細小環節出現問題,都將導致整個供彈系統的癱瘓,而且排除故障較為麻煩,只能根據故障現象進行逐段排查,機械的復雜嚙合也為維修帶來了很大困難。電氣化供彈通過電信號將各硬件進行整合,供彈過程中如果出現故障,根據各子系統反饋的電信號將可以快速定位故障位置,同時高度模塊化的設計可以實現故障部件的快速更換,維修難度與維修時間大為改善。
3)設置聯鎖裝置,性能安全可靠
為了防止在艦炮工作期間出現意外而致使火炮和炮彈受損,艦炮供彈系統設有聯鎖裝置。以AK-176毫米艦炮為例,其每一路供彈系統都有5個機電聯鎖和1個機械聯鎖,以保證出現故障時斷開相應一側的供彈減速箱。電氣化供彈方式下,可將聯鎖信號與控制時序進行緊密結合,當出現聯鎖信號與時序不匹配時立即切斷電源進行自我保護,電信號傳輸的快速性可以保證在出現故障時系統識別快、應對快,對艦炮的損失降到最低。
4)自動化程序高,供彈效率提升
電氣化控制使得供彈系統更為自動化,機械傳動結構的有效減少使得各機構運作效率得到提升,能很好地彌補目前我國大、中口徑艦炮存在的供彈率較低這一短板。
4 電氣化供彈系統模擬器設計
4.1模擬器設計的目的及意義
系統基于供彈時序關系,采用C8051F020單片機控制LED燈對艦炮供彈系統進行彈位運動模擬[9]。模擬器與艦炮實物具有相同的原理,一方面能直觀地展示供彈系統中彈位的運動變化狀態,為學員平時的訓練和維修提供了一個技術平臺;另一方面也是對我國艦炮供彈系統由機械化控制轉向電氣化控制作出的技術性嘗試,具有重要意義。
4.2硬件設計
為了真實還原炮彈在艦炮供彈系統中的運動路徑,系統采用了六塊電路板分別模擬左右彈鏈平臺(×2)、左右揚彈擺彈機構(×2)、裝填機構以及總體控制部分,每部分獨立供電。系統核心部件由單片機控制芯片C8051F020、時鐘電路、電源模塊、ULN2003驅動電路以及LED顯示板等組成。硬件整體工作流程:C8051F020根據供彈時序關系,結合定時器產生的脈沖次數,通過驅動電路實現對LED顯示板的控制。
LED的設置直接影響到模擬效果,AK-176毫米艦炮彈鏈平臺有75個彈位,為了更好地顯示炮彈的步進過程,在每個彈位之間加了一個過渡彈位,同時模擬推彈過程設置10個LED燈,因此彈鏈平臺總共有160個燈,所以選用兩片8×10 LED顯示板;揚彈過程是一個連續的過程,模擬用16個LED燈來實現,擺彈過程受不同擺動角度的影響,為了模擬效果,只考慮在平射狀態下擺動90°用了16個LED燈來顯示,因此揚彈擺彈模塊選用一片4×8 LED顯示板;裝填過程同樣加入過渡彈位,左右分別用了8個LED燈顯示,每進行一次發射就進行一次壓彈,相應的炮彈往前步進一個彈位,發射過程用也用了8個LED燈顯示,故裝填機構模塊選用了一片3×8 LED顯示板。模擬器的硬件結構及實物圖如圖3、4所示。

圖3 模擬器硬件結構

圖4 模擬器實物
4.3軟件設計
設計采用中斷思路,設定定時器周期性地產生中斷,以2.6ms為一個時鐘脈沖周期(即時鐘脈沖頻率f=384.6Hz),計360個時鐘脈沖正好作為一個供彈周期,相當于角度盤的360°供彈周期,相應的T1~T5角度值則轉化為供彈各子系統所需接收的時鐘脈沖數,例如炮彈在彈鏈中的運動時間T1=277°,表示彈位步進一次需接收277個時鐘脈沖。
LED采用動態掃描方式[10],設立兩個數組:顯示緩存區Dp[i]和彈位寄存器Rd[i]。每個指示燈狀態對應一個顯示緩存區中的一個狀態位,而顯示緩存區為8位寄存器相當于一個字節,控制8個LED燈。邏輯程序及時序控制實現對邏輯數組的彈位寄存器內相應數值的變化,進而一一對應顯示緩存區的改變,實時反映在每個指示燈的亮暗變化上,從而模擬真實彈位的變化。圖5為彈位寄存器Rd[i]左移一位實現相應LED動態變化的圖5。
程序運行流程:當系統接收到連桿信號后,啟動定時器,中斷服務程序中開始記錄時鐘脈沖數,當達到相應脈沖數時(程序根據圖2時序關系提前預設各子系統進行彈位變化所對應的脈沖數),程序即對相應子系統的彈位寄存器Rd[i]進行移位操作,從而實現對應LED的動態變化,直至360個時鐘脈沖,即一個供彈周期結束,系統關閉定時器等待下一個連桿信號。圖6為中斷程序流程圖。
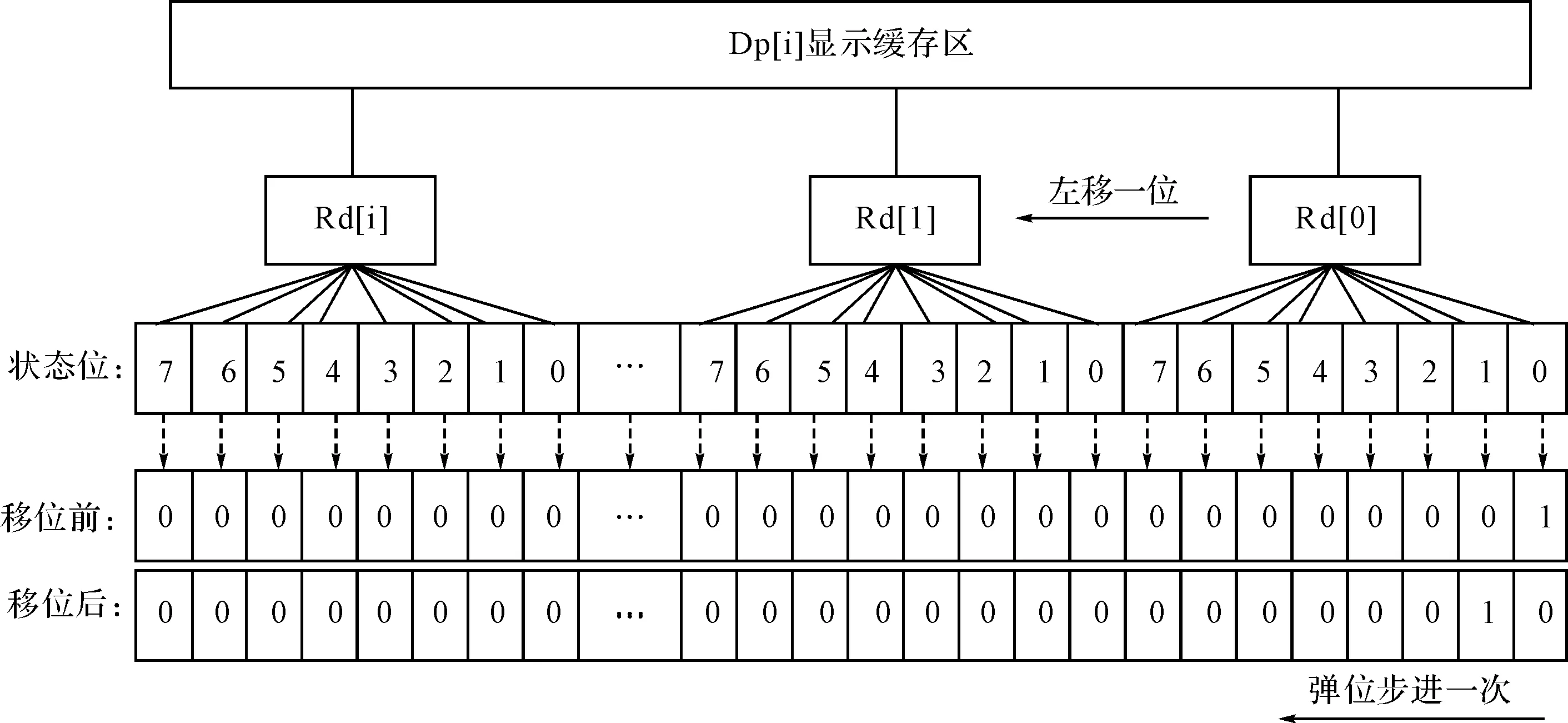
圖5 LED模擬彈位步進程序設計
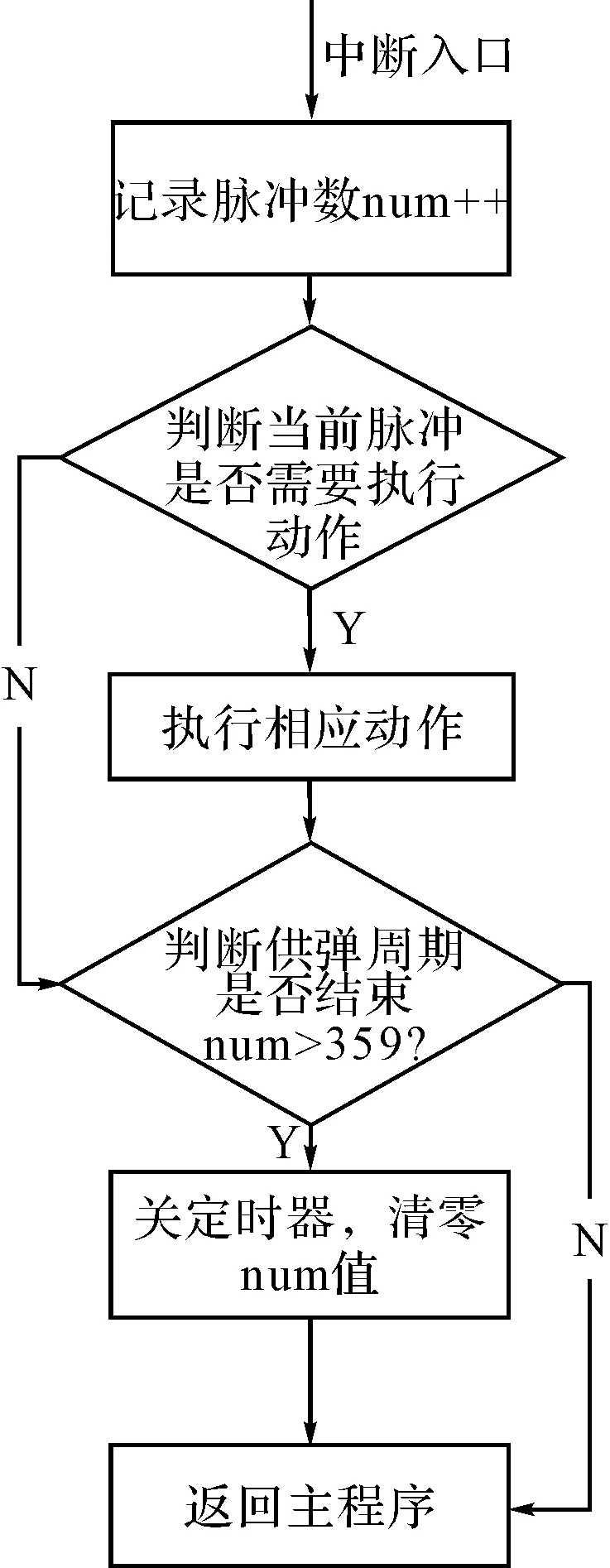
圖6 中斷程序流程圖
5 結語
本文以俄羅斯AK-176毫米艦炮為分析對象,對其供彈系統的機械結構及控制時序進行分析,同時提出了一種基于供彈時序關系,采用電信號代替傳統機械化傳動控制方式的電氣化供彈方案,并設計了一套電氣化供彈模擬器,模擬器直觀展示了供彈系統中彈位的運動變化狀態,模擬結果有效驗證了供彈系統電氣化控制的可行性。
[1] 胡勝海,徐鵬,許偉科,等.大口徑艦炮供彈平臺控制時序設計與試驗研究[J]. 南京理工大學學報,2011,35(2):194-199.
[2] 梁世瑞.自動機創新學引論[M].國防工業出版社,2007:45-48.
[3] 應文健,韓峻,李玉,等.中大口徑艦炮電氣結構原理與維修[J].海軍工程大學學報,2015(2):35-40.
[4] 張相炎.火炮自動機設計[M].北京:北京理工大學出版社,2010:146-149.
[5] 孫維生,李文靜,宋永彬.俄76mm艦炮裝填機構分析[J].火炮發射與控制學報,2002(1):29-32.
[6] 康酈,張源.淺論單76mm艦炮供彈系統[J].火炮發射與控制學報,1997(2):49-53.
[7] 古剛,葛楊,肖亮.基于時序設計方法的新型供彈系統性能仿真研究[J].哈爾濱理工大學學報,2009,14(4):12-16.
[8] 葛楊,胡勝海,張家泰.新型供彈系統并行時序設計研究[J].哈爾濱工程大學學報,2004,25(5):587-591.
[9] 張培仁,孫力.基于C語言C8051F系列微機控制原理與運用[M].北京:清華大學出版社,2007:134-140.
[10] 郭天祥.新概念51單片機C語音教程[M].北京:電子工業出版社,2007:256-261.
Electric Control Scheme Based on Naval Gun Cannonball Supply System Control Sequence
JI Jie1,2HAN Jun1
(1.Naval University of Engineering, Wuhan430033)(2. No. 92721 Troops of PLA, Zhoushan316000)
This paper uses electric single instead of traditional mechanically transmission, proposes a theory of electric control of naval gun cannonball supply system based on sequential control. By the way, an electric cannonball supply simulator is designed, which used the C8051F020 microcontroller to control the LED to carry out a sport simulation of the naval gun cannonball supply system, joining the sequential control and logic control for structure simulation to realize the cannonball supply system of the whole process monitoring, judgment, control and man-machine exchange function.
cannonball supply system, sequential control, simulator, electric control
2016年4月8日,
2016年5月28日
季杰,男,碩士研究生,研究方向:武器系統運用與保障工程。韓峻,男,碩士生導師,研究方向:兵器測試技術。
TH12
10.3969/j.issn.1672-9730.2016.10.040
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32