智能倉儲機械手的結構設計
2016-11-12 14:52:10王曉天
企業技術開發·中旬刊 2016年10期
關鍵詞:結構設計
王曉天

摘 要:工業機械手在工業生產的各個方面得到廣泛使用。文章根據國內外先進的機械手技術,設計出一種用于物料搬運,結構簡單,維護方便的機械手的結構。主要設計機械手臂部分和機械手抓手部分的機構。
關鍵詞:機械手;機械手臂;機械手抓手,結構設計
中圖分類號:TP242.6 文獻標識碼:A 文章編號:1006-8937(2016)29-0003-02
1 引 言
目前工業機械手面臨的問題主要還是成本的高昂和精度控制的不易達到要求。從工業機械手的具體應用情況來看,生產過程的機械自動化已成為現代工業的主要問題。雖然現代機械制造業中的加工、裝配等各生產工序主要是間斷的,但自動化生產中裝卸、搬運等工序亟待實現機械化,工業機械手的出現便可滿足這一需求。無論國內還是國外,工業機械手的應用前景廣闊,而對機械手使用性能的要求則越來越高,面對越來越多樣的產品需求,機械手結構上在向著小巧型,靈活型的方向發展,因此機械手結構設計的合理性變的至關重要。
2 機械手結構設計
2.1 機械手手臂部分原理
欲滿足機械手的搬運功能,即將貨物從某一水平高度提升至另一水平高度,可采用曲柄連桿機構實現規定搬運動作。本課題應用平行四邊形機構的運動特點,依靠電動推桿驅動平行四邊形機構轉動實現貨物高度上的變化。
平行四邊形機構是一種平面連桿機構,由于構件聯接呈平行四邊形,因此也叫做平行四邊形機構。平行四邊形機構結構簡單,易于分析,構件運動一致性好,廣泛應用于各種實現平移搬運等功能的機構。
2.2 機械手手臂部分結構設計
機械手手臂在整個工作過程中起著至關重要的作用。本文所設計的機械手臂為平行四邊形機構,由于機械手臂也是機械手負載的主要施加部位,故應具有良好的強度與剛度,保證在機械手工作中不能發生彎曲或折斷的情況,同時搬運機構若過于沉重則會影響搬運功能的實現。
工業鋁型材表面經氧化處理后,外觀漂亮且耐臟,工作中沾染的油污易于清洗,可根據不同承重采用不同規格型材組裝,同時搭配鋁型材配件,無需焊接,安裝拆卸方便,輕便環保,整體機械性能較好,廣泛應用于生產制造行業。
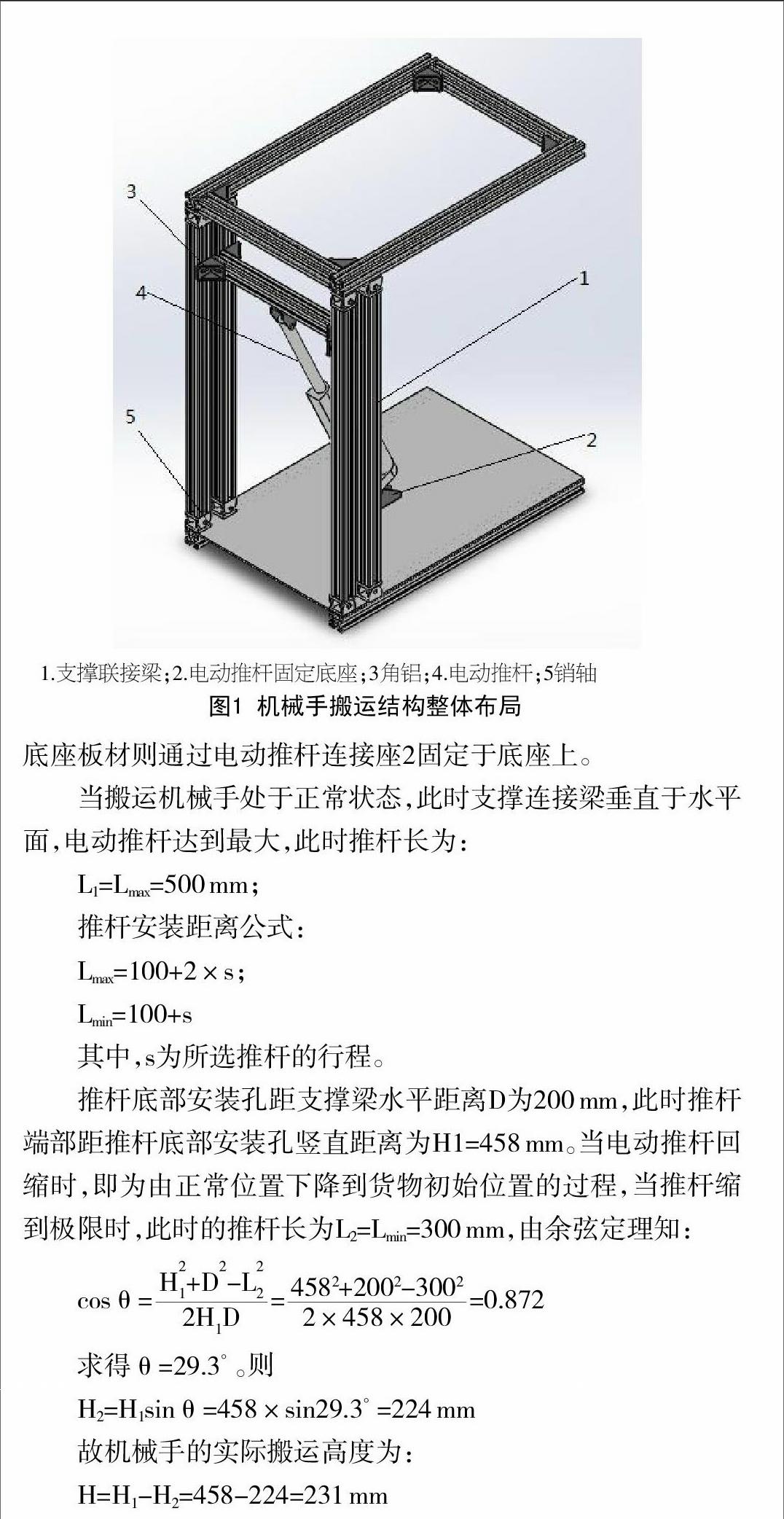
本文的搬運機構選用密度小強度大并廣泛應用于工業機械手行業的工業鋁型材較為合適。機械手手臂結構整體布局及各個部件,如圖1所示。
機構中的工業鋁型材之間通過鉸接的方式聯接而成,支撐連桿梁1通過銷軸5與固定在底座板材上的連接件聯接,由角鋁3將支撐梁與聯接電動推桿4的橫梁聯接起來,而電動推桿4與底座板材則通過電動推桿連接座2固定于底座上。
2.3 機械手抓手部分原理
搬運機械手末端的機械手爪是機械手直接與貨物接觸的部分,機械手爪能夠直接完成對貨物的拾取和夾緊動作,它可以依據人手動作通過設計實現相應功能,通常機械手爪被安裝在手臂的端部。機械手爪結構形式與人手有較大區別,它的結構外形擁有機械式的特點,通過不同部件的聯接組合完成指定運動過程,依靠自身的運動而將物件抱住,故手爪即為主要的傳力構件。
本課題所設計機械手的手部結構應為鉗爪式,鉗爪式手部結構包括手指和傳力機構。如圖2所示,機械手爪1在電動推桿的驅動下向右移動,當左部碰到左側連桿機構時帶動手爪2處,機械手爪的兩部分1、2完成張開手爪動作;當右側手爪在電動推桿縮回時,手爪2在彈簧作用下回復原來位置實現對貨物的抓取動作。
2.4 機械手抓手部分結構設計
對機械手爪設計過程中,應考慮以下幾個方面:機械手爪部件至少要有一定負載承受力,在將貨物重量計入影響后,鑒于搬運動作中由于顫動所產生的影響也應適當增大設計強度,避免工件發生松動或脫落的情況。
為使機械手爪和被運輸貨物間保持較為穩定的姿態,應根據貨物的實際外形設計相應的末端執行機構形狀。所設計機械手爪主要受到被夾持物的反作用力,必須達到設計所需強度和剛度防止手爪斷裂或彎曲變形的狀況發生,同時設計機械手結構應該簡單,縮小尺寸,盡量輕便以免影響運動過程。本文所設計機械手結構,如圖3所示。
其中,機械手抓取動作的通過以下動作實現:由電動推桿1伸長驅動一體式小抓手向右移動,同時與一體式小抓手通過螺栓連接的連接桿4被帶動向右移動,當連接板5接觸到連桿6時,在連桿機構作用下,連桿8將沿水平方向向左移動直至小抓手突出部分完全縮回連接板9內,此時連接板右端面接觸貨物,電動推桿1縮回直至右側一體式小抓手3上的連接板與貨物接觸并實現夾緊,在回縮過程中,當連接板5與連桿6不再接觸時,連桿8在彈簧7的作用下回復原位,兩個機械手爪的承重板通過支撐貨籃的缺口位置,完成對貨籃的抓取動作。
3 結 語
本文主要設計一種用于搬運貨物的機械手,在生產過程中的搬運貨物環節里替代工人,提高工作效率,節約更多的人力成本和物力成本。主要進行機械手的結構設計,通過對機械手臂和機械手抓手的結構設計,使整個機械手機構較為簡單,維護方便。
參考文獻:
[1] 王曉東.機器人技術其礎[M].哈爾濱工業大學出版社,2003
[2] 徐元昌.工業機械手[M].北京:中國輕工業出版社,2001
[3] 牧野洋,謝存禧,鄭時雄.空間機構及機器人機構[M].北京:機械工業出 版社,2003.248~26
[4] 劉明保,呂春紅.機械手的組成機構及技術指標的確定[J]. 河南高等 專科學校學報,2004,1(1).
[5] 張楊林.國內工業機器人市場及發展趨勢[J].大眾科技.2006(6): 191-192 .
[6] 李剛,周文寶.直角坐標機器人簡述及其應用介紹[J].技術縱橫.2008(9): 72-75 .
猜你喜歡
建材發展導向(2023年6期)2023-03-31 02:51:38
建材發展導向(2022年6期)2022-04-18 08:17:26
建材發展導向(2021年11期)2021-07-28 06:57:42
建材發展導向(2021年7期)2021-07-16 07:07:28
防爆電機(2020年4期)2020-12-14 03:11:14
中國核電(2017年1期)2017-05-17 06:10:04
電子制作(2016年1期)2016-11-07 08:43:05
專用汽車(2016年5期)2016-03-01 04:14:49
專用汽車(2016年5期)2016-03-01 04:14:48
中國房地產業(2016年2期)2016-03-01 01:25:23
