變循環發動機完全分布式控制
2016-11-15 06:01:42謝振偉郭迎清姜彩虹田飛龍李睿超
航空學報 2016年6期
關鍵詞:發動機
謝振偉, 郭迎清,*, 姜彩虹, 田飛龍, 李睿超
1.西北工業大學 動力與能源學院, 西安 710129 2.中國航空發動機集團有限公司 沈陽發動機設計研究所, 沈陽 110015
?
變循環發動機完全分布式控制
謝振偉1, 郭迎清1,*, 姜彩虹2, 田飛龍1, 李睿超1
1.西北工業大學 動力與能源學院, 西安710129 2.中國航空發動機集團有限公司 沈陽發動機設計研究所, 沈陽110015
采用分布式控制架構可以降低變循環發動機控制系統的重量并有利于系統的開發和擴展。提出了一種完全分布式控制架構,控制算法的計算完全分布到智能執行機構中,計算所需的參數值由智能傳感器通過串行數據總線發送到智能執行機構。變循環發動機完全分布式控制系統研發的主要工作是設計分散控制算法和總線通信方案。將控制回路的耦合當作總擾動的一部分,使用線性自抗擾控制器(ADRC)觀測并在控制信號中消除總擾動,實現了分散控制。在CAN總線硬件的基礎上,使用CANaerospace高層協議設計了時間觸發的總線通信方案。從而實現了變循環發動機完全分布式控制。在MATLAB/Simulink環境下使用TrueTime工具箱搭建了仿真系統。使用TrueTime Kernel模塊仿真智能執行機構與智能傳感器的計算單元,使用TrueTime Network模塊仿真CAN總線,并且將線性ADRC和CANaerospace協議寫入到計算單元中。仿真結果表明:所建立的變循環發動機完全分布式控制系統能夠適應發動機進氣狀況和健康狀況的大范圍變化,具有較好的魯棒性。
變循環發動機; 完全分布式控制; 線性自抗擾控制; 分散控制; CANaerospace協議
分布式控制是航空發動機控制的發展方向[1-4]。與現有航空發動機集中式控制系統相比,分布式控制系統在結構設計上具有以下兩個特征:① 控制系統的計算任務分散到多個計算節點;② 各節點之間使用串行數據總線進行通信。
當前,由于高溫電子學技術和分散控制理論研究的限制,航空發動機分布式控制系統將先采用部分分布式架構[5-6]。在部分分布式架構中,在航空發動機的適當位置設置數據集中器,傳感器和執行機構保留其模擬連接方式,連接到鄰近的數據集中器;原集中式控制器中的信號的A/D、D/A轉換任務和執行機構的小閉環控制算法計算任務分散到數據集中器完成。數據集中器通過串行數據總線與主控制器連接。與集中式控制架構相比,部分分布式控制架構減少了線纜用量,降低了控制系統重量。由于主控制器不再直接連接眾多模擬線路,因而主控制器可以離開發動機,放置在飛機上環境理想的位置,降低了計算負擔、熱負擔,并且不受發動機振動的影響。
未來隨著航空發動機分散控制理論的工程化和高溫電子技術、嵌入式技術的進步,航空發動機分布式控制系統將過渡到完全分布式架構。完全分布式架構包括智能執行機構、智能傳感器和數據通信總線三部分。控制系統的開環和閉環控制功能完全分散并嵌入到各控制量對應的執行機構中,每個傳感器也嵌入計算單元負責A/D、濾波等計算,所有的通信都使用總線。
完全分布式架構取消了模擬線纜,數據通信完全使用總線,進一步降低了控制系統重量;并且是一個開放式的架構,便于系統軟件的開發、擴展與升級,減少了這些過程中的考核驗證工作量,有利于系統的移植、發展與通用化。
與常規發動機相比,變循環發動機[7-10]增加了可變面積涵道引射器(Variable Area Bypass Injector, VABI),有更多的可調幾何裝置,采用多變量閉環控制。智能傳感器的A/D、濾波等計算的實現可以參考集中式控制中的相關方案。則設計其完全分布式控制系統的工作主要包括研究分散控制算法和設計總線通信方案兩部分。
韓京清結合反饋控制與抗擾概念[11],提出了將系統外部干擾和內部未建模部分視為總擾動,并將總擾動作為系統的一個狀態,使用擴展狀態觀測器實時觀測總擾動并在控制信號中將其消去的自抗擾控制(Active Disturbance Rejection Control, ADRC)理論[12]。ADRC已經成功地應用在國內外大量的工程實踐中。為了解決非線性ADRC需要整定的參數多和參數整定復雜的問題。Cleveland州立大學的Gao教授將線性化和帶寬的概念引入ADRC,提出了線性ADRC[13]。線性ADRC只有一個控制器帶寬參數需要整定。線性ADRC通過了工業控制評估[14],先后被Ti、Siemens和Freescale用在控制芯片中。
在航空發動機領域,文獻[15]將ADRC應用于加力控制;文獻[16]設計了基于非線性ADRC的限制保護控制器;文獻[17]將渦扇發動機數學模型中不包括輸入的 “動態耦合”部分看作回路總擾動的一部分,使用ADRC實現了解耦控制。
CANaerospace協議[18-19]是Stock Flight Systems公司提出的專用于航空航天領域的一個為機載微機系統使用CAN總線進行高可靠性通信而設計的非常輕量級的協議,對于它的執行只需用少量的資源即可。從1997年的最初定義起,CANaerospace就被設計成一種開放的標準。這個協議得到來自不同組織的使用者的補充,CANaerospace1.6版本標準被美國國家航空航天局(NASA)在2001年作為“先進的通用航空運輸實驗數據總線(AGATE DATA BUS)”來標準化。文獻[20-21]探索了CANaerospace在無人飛行器系統中的應用。
本文首次研究了變循環發動機的完全分布式控制。首先進一步擴大了總擾動的范圍,將變循環發動機某一閉環控制回路中輸入、輸出標準型之外的部分都看作總擾動,使用線性ADRC來實時觀測和補償總擾動,設計該組合的控制器,使得變循環發動機閉環控制的3組實際輸入、輸出之間解耦,以此作為分散控制算法;然后針對安全關鍵系統總線通信時間觸發的要求,以CAN總線為基礎在應用層參考CANaerospace協議設計了時間觸發的通信方案,搭建了變循環發動機完全分布式控制系統;最后使用TrueTime工具箱[22]在Simulink環境下建立變循環發動機完全分布式控制系統仿真平臺,對系統在不同進氣條件和發動機健康狀況下的工作情況進行了仿真,說明了系統的可用性。
1 完全分布式控制架構
變循環發動機的完全分布式控制架構如圖1所示,包括智能執行機構(Smart Actuator, SA)模塊、智能傳感器(Smart Sensor, SS)模塊和數據通信總線(Data Bus)三部分。

圖1 變循環發動機(VCE)完全分布式控制架構Fig.1 Variable cycle engine (VCE) fully distributed control structure
圖1中:α表示發動機可調靜子;VABI表示可變面積涵道引射器;Wf和Wfa表示主燃油流量和加力燃油流量;PLA表示油門桿角度;A8表示尾噴管截面面積;pt、ps和Tt分別表示氣流的總壓、靜壓和總溫。
控制系統的開環和閉環控制的計算完全分散并嵌入到各控制量對應的SA模塊中,SS模塊負責傳感器數據的A/D、濾波等計算,然后通過數據通信總線將傳感器數據發送到實現控制計算需要該數據的SA模塊中。
2 分散控制算法
變循環發動機的閉環控制是用主燃油流量Wf、尾噴管截面面積A8和混合室外涵道入口的可變面積涵道引射器的面積AVABI 3來控制低壓轉子相對換算轉速n1,cor,rel、發動機壓比πeprs和混合室入口處外涵與內涵氣流的壓比πlepr。
(1)
πeprs=ps63/pt2
(2)
πlepr=pt163/pt63
(3)
式中:n1為低壓轉子轉速;Tt2、pt2為風扇進口總溫、總壓;ps63、pt63為混合室入口內涵氣流靜壓、總壓;pt163為混合室入口外涵氣流總壓;下標dp表示設計點的數值;下標rel表示與設計點數據的比值。
將控制計算分散到各智能執行機構中需要將變循環發動機的閉環控制解耦為3個相互獨立的回路。令x1=n1,cor,rel,x2=πeprs,rel,x3=πlepr,rel;u1=Wf,rel,u2=A8,rel,u3=AVABI 3,rel。變循環發動機可表示為如下狀態方程組:
(4)
式中:bij為第i個狀態變量xi的狀態方程中第j個控制量uj的放大系數;hi,outer(i=1,2,3)為影響狀態變化的外部擾動。
ADRC以串聯積分器為標準型[23]。把輸入輸出標準型之外的部分看作總擾動,包括內擾和外擾。內擾是指標準型之外的系統內部未建模部分,外擾是指影響輸出的外部擾動。由于這兩者都對輸出有影響,所以可以把總擾動當作系統的一個狀態,使用系統的輸入輸出來觀測總擾動。在這里把第i個狀態方程等號右邊biiui和hi,outer之外的部分看作第i個輸入輸出通道的內擾hi,inner,以第1個方程為例:
(5)
再考慮對第1個輸出有影響的外部擾動h1,outer,則該通道的總擾動為
h1,all=h1,inner+h1,outer
(6)
于是
(7)
將總擾動h1,all看作這個輸入輸出通道的一個狀態。令z1=y1,z2=h1,all,則有
(8)

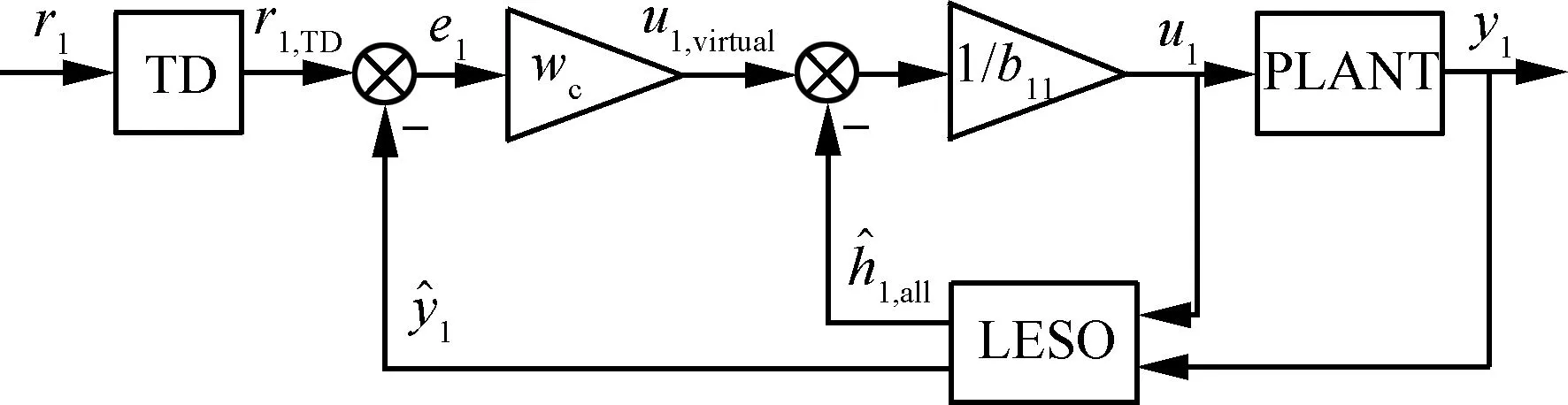
圖2 單個輸入輸出通道的線性自抗擾控制(ADRC)Fig.2 Linear active disturbance rejection controller (ADRC) of one input and one output channel
(9)
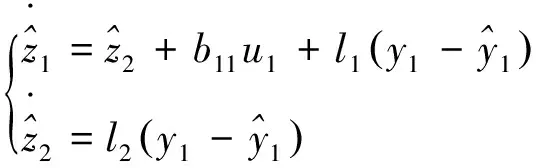
式中:l1、l2為觀測器增益,將z1=y1代入并整理,可得
(10)
于是可得觀測器系數矩陣為
將矩陣A的特征值都取為-wo,并稱wo為觀測器的帶寬[13]。則有
(11)

(12)
在輸入量中消去總擾動的影響,稱u1,virtual為消去總擾動之前的虛擬控制量,構造
(13)
代入式(7),可得
(14)
可見,虛擬控制量u1,virtual與輸出y1之間的關系化為ADRC的標準型。對于這個簡單的標準型,使用一個簡單的比例控制即可:
(15)
則對于第1個輸入輸出通道,有
(16)
將控制器帶寬和觀測器帶寬的關系選擇為wo=2wc,則該回路控制器的設計僅需要知道b11,根據經驗b11的精度在50%以上即可,故可以使用數據擬合的方法來獲得。而需要整定的參數只有wc。
對于式(4)所示系統的3個輸入輸出通道,都按照上述示例對第1個通道的處理方法,把輸入輸出標準型之外的部分看作總擾動,使用LESO根據回路輸入輸出來觀測總擾動,并在輸入量中消去總擾動的影響,如圖3所示,3個線性ADRC將系統解耦為3個控制回路。解耦后的系統為
(17)
可見,3個閉環控制回路之間已經解耦了。

圖3 三輸入三輸出系統解耦控制Fig.3 Decoupling control of system with three inputs and three outputs
將3個線性ADRC分別嵌入到3個用于閉環控制的執行機構中:用Wf控制n1,cor,rel按期望值變化;用A8控制πeprs按期望值變化;用AVABI 3控制πlepr,保持πlepr=1.05。再將相應的開環控制算法分別嵌入到其他執行機構中。即實現了完全分布式控制系統智能執行機構的設計。
3 總線通信方案
CAN總線的高性能與低成本得到了廣泛的認可,在國內外航空發動機分布式控制系統研究中也廣為應用[24-29],本文在變循環發動機完全分布式控制系統中也選用CAN總線。CAN的底層協議采用事件觸發機制,有可能會導致報文碰撞,從而導致報文的接收有可能存在不可預知的延遲,尤其是當總線受到干擾使得報文發送或接收失敗頻繁出現時,某些低優先級的報文會由于高優先級報文長時間占用總線而被阻塞,使得整個系統性能遭到破壞,不滿足航空發動機這樣的安全關鍵系統的要求。CANaerospace協議將總線上的時間劃分為一個個最小時間幀(MinorTimeFrame)。在最小時幀上設置參數的“傳輸插槽(TransmissionSlot)”。有些傳輸插槽用來在每一個最小時幀傳輸固定的周期性參數的報文;有些傳輸插槽用來在不同最小時幀輪流傳輸某些不同的周期性參數的報文;剩余的傳輸插槽用于傳輸非周期參數的報文。這樣,每一個周期性傳輸參數的報文在總線上的傳輸情況都是確定的。
如圖1所示,共計12個SS模塊和10個SA模塊需要使用總線通信。由于控制計算分散到智能執行機構中,所以實現控制功能所需的參數值由SS模塊通過總線發送到SA模塊,如表1所示。

表1 通過總線傳輸的參數值
其中,Δn2等3個非周期傳輸的數據為傳感器數值超出其限制的值,當傳感器數值超限時,根據這個值的大小和超限持續時間,將這個超限量發送到PLA或所有執行結構,以拉低PLA值或直接調整控制量。
一個CANaerospace報文采用擴展標識符并使用數據段全部的8個字節,再加入幀間部分(3位)和一定數量的填充位(取最大18位),這樣一個報文長度為:108+3+18=129位。使用CAN總線的最大傳輸速率1 Mbit/s,則一個CANaerospace報文需要129 μs的傳送時間。以20 ms為最小時幀,則每個最小時間幀可以傳輸155個報文,即每個最小時間幀可提供155個數據傳輸插槽。將這些數據傳輸插槽按圖4進行設計。由圖4可見周期性數據傳輸占有了155個傳輸插槽中的13個,考慮系統使用雙余度熱備份,總線負載約為16.77%,可見總線還有充足的剩余帶寬(大于80%)可以用來傳輸非周期性的超限數據和其他診斷、管理數據。這說明在上述通信方案下,將采用CANaerospace高層協議的CAN總線作為變循環發動機完全分布式控制系統的通信總線是可行的。

圖4 傳輸插槽的使用Fig.4 Use of transmission slots
4 仿真驗證
圖5為變循環發動機完全分布式控制仿真系統。如圖5所示,使用TrueTime工具箱中的TrueTime Kernel模塊仿真12個智能傳感器和10個智能執行機構中的計算單元,使用TrueTime Network模塊仿真通信總線。在總線類型中選擇CAN總線,在計算單元的代碼中實現線性ADRC和CANaerospace高層協議,在Simulink環境中建立了變循環發動機完全分布式控制系統。使用變循環發動機部件級模型[30]對系統進行仿真驗證。
在高度H=0 km,馬赫數Ma=0,油門桿角度PLA=55°,對應n1,cor,rel=0.9,πeprs,rel=0.9。通過變循環發動機部件級模型的仿真數據擬合[31]得到b11=0.62,b22=-15.39,b33=-1.39。將觀測器帶寬均取為控制器帶寬的2倍,通過觀察仿真效果整定了3個線性ADRC的控制器帶寬:wc1=5,wc2=10,wc3=10。
對3種情況下變循環發動機控制系統的工作情況進行仿真。油門桿角度由55°上升到65°,對應n1,cor,rel與πeprs,rel的期望值由0.9上升到1.0,πlepr,rel的期望值保持不變。第1種情況為高度H=0 km,馬赫數Ma=0,控制對象為新發動機;第2種情況為H=12 km,Ma=0.5,控制對象為新發動機;第3種情況為H=12 km,Ma=0.5,控制對象為工作較長時間后性能嚴重退化的發動機。性能退化情況如表2 所示。表2中:FAN表示風扇,CDFS表示核心機驅動風扇級,HPC表示高壓壓氣機,HPT表示高壓渦輪,LPT表示低壓渦輪。風扇、高壓壓氣機、高壓渦輪、低壓渦輪的流量因子和效率因子的變化情況來自于渦扇發動機嚴重退化數據,在這里將核心機驅動風扇級的退化情況取為與風扇相同。

圖5 變循環發動機完全分布式控制仿真系統Fig.5 Simulation of variable cycle engine fully distributed control system

表2 發動機部件的退化情況
圖6給出了3種情況下的仿真輸出曲線。可見,控制器工作正常,控制效果良好。這說明所設計的變循環發動機完全分布式控制系統可以在飛行狀態較大變化以及發動機退化較為嚴重時,仍然能夠正常工作。
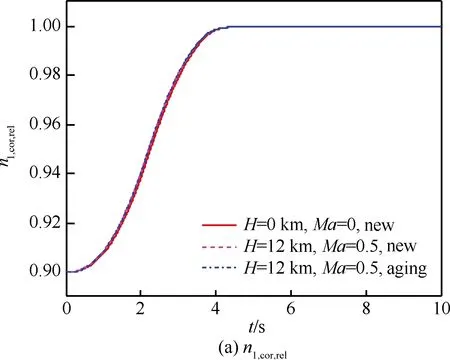
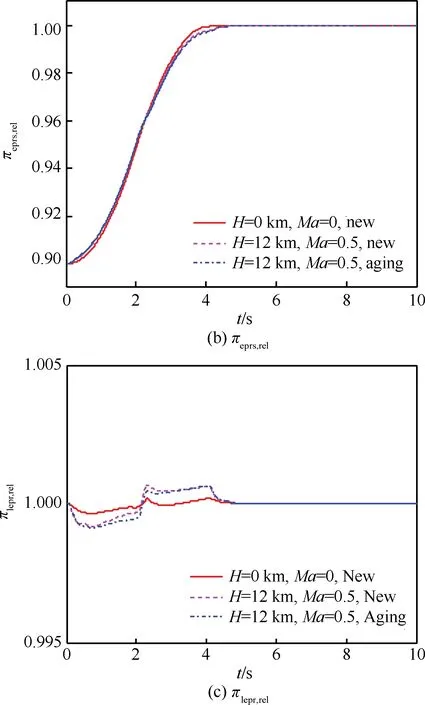
圖6 3種情況下n1,cor,rel,πeprs,rel和πlepr,rel的變化曲線Fig.6 Variation curves of n1,cor,rel,πeprs,reland πlepr,rel in three situations
圖7為新發動機和性能退化發動機在仿真過程中的燃燒室出口總溫變化曲線。可見,性能退化發動機的燃燒室出口總溫高于新發動機的燃燒室出口總溫,發動機性能退化后性能保證的代價是以犧牲其他氣動熱力參數而獲得的。

圖7 新發動機和性能退化發動機的Tt4變化曲線Fig.7 Tt4 variation curves of new engine and aging engine
5 結 論
1) 基于線性自抗擾控制器(ADRC)解耦的分散控制算法結構簡單,需要的已知信息和待整定參數少,便于工程實現,適用于航空發動機完全分布式控制。
2) 采用CANareospace高層協議的CAN總線可以滿足變循環發動機完全分布式控制的通信需求,并且有較多余量可以用于系統未來擴展。
3) 在地面、高空和發動機健康嚴重退化的情況下的仿真結果顯示,所設計的變循環發動機完全分布式控制系統具有較好的魯棒性,有一定的工程應用前景。
[1]DENNIS E C, RANDY T, JOSEPH S. Concepts for distributed engine control:AIAA-2007-5709[R]. Reston: AIAA, 2007.
[2]DENNIS E C, ALICIA M Z, ELIOT A. Developing an integration infrastructure for distributed engine control technologies: AIAA-2014-3532[R]. Reston: AIAA, 2014.
[3]郭迎清, 章泓. 航空發動機分布式控制系統綜述[J]. 航空發動機, 2003, 29(3): 52-55.
GUO Y Q, ZHANG H. Survey of the distributed control system for an aeroengine[J]. Aeroengine, 2003,29(3): 52-55 (in Chinese).
[4]黃金泉, 徐科. 航空發動機分布式控制系統結構分析[J]. 航空動力學報, 2003, 18(5): 698-704.
HUANG J Q, XU K. Distributed control systems for aeroengines: A survey[J]. Journal of Aerospace Power, 2003, 18(5): 698-704 (in Chinese).
[5]JEFFREY T, KEVIN L, SIVAK P, et al. Design and system implement considerations for high-temperature distributed engine control:AIAA-2010-6674[R]. Reston: AIAA, 2010.
[6]宋軍強, 潘慕絢, 黃金泉. 航空發動機分布式控制系統技術分析及系統方案[J]. 航空動力學報, 2013, 28(10): 2391-2400.
SONG J Q, PAN M X, HUANG J Q. Technology analysis and system scheme for aero-engine distributed control system[J]. Journal of Aerospace Power, 2013, 28(10): 2391-2400 (in Chinese).
[7]JOHNSON J E. Variable cycle engine developments at general electric-1955-1995[M]. Reston: American Institute of Aeronautics and Astronautics, Inc., 1996: 105-158.
[8]PETER V, WALTER B, VICTOR F V, et al. Study of an airbreathing variable cycle engine: AIAA-2011-5758[R]. Reston: AIAA, 2011.
[9]周紅, 王占學, 劉增文, 等. 雙外涵變循環發動機可變幾何特性研究[J]. 航空學報, 2014, 35(8): 2126-2135.
ZHOU H, WANG Z X, LIU Z W, et al. Variable geometry characteristics research of double bypass variable cycle engine[J]. Acta Aeronautica et Astronautica Sinica, 2014, 35(8): 2126-2135 (in Chinese).
[10]張鑫, 劉寶杰. 核心機驅動風扇級的匹配特性分析[J]. 航空學報, 2015, 36(9): 2850-2858.
ZHANG X, LIU B J. Analysis of the matching characteristics of the core driven fan stage[J]. Acta Aeronautica et Astronautica Sinica, 2015, 36(9): 2850-2858 (in Chinese).
[11]韓京清. 從PID技術到“自抗擾控制”技術[J]. 控制工程, 2002, 9(3): 13-18.
HAN J Q. From PID technique to active disturbances rejection control technique[J]. Control Engineering of China, 2002, 9(3): 13-18 (in Chinese).
[12]韓京清. 自抗擾控制技術: 估計補償不確定因素的控制技術[M]. 北京: 國防工業出版社, 2008: 255-262.
HAN J Q. Active disturbances rejection control technique: The technique for estimating and compensating the uncertainties[M]. Beijing: National Defense Industry Press, 2008: 255-262 (in Chinese).
[13]GAO Z Q. Scaling and bandwidth-parameterization based controller tuning[C]//2003 Proceedings of the American Control Conference. Piscataway, NJ: IEEE Press, 2003: 4989-4996.
[14]TIAN G, GAO Z Q. Benchmark tests of active disturbance rejection control on an industrial motion control platform[C]//2009 Proceedings of the American Control Conference. Piscataway, NJ: IEEE Press, 2009: 5552-5557.
[15]張海波, 孫健國. 自抗擾控制算法在發動機加力過渡態控制中的應用[J]. 推進技術, 2010, 31(2): 219-225.
ZHANG H B, SUN J G. Application of active disturbance rejection control method in aeroengines afterburning transition state control[J]. Journal of Propulsion Technology, 2010, 31(2): 219-225 (in Chinese).
[16]王元, 李秋紅, 黃向華, 等. 基于ADRC的航空發動機限制保護器設計[J]. 北京航空航天大學學報, 2012, 38(9): 1154-1157.
WANG Y, LI Q H, HUANG X H, et al. Controller design for limit protection of aero-engine based on ADRC [J]. Journal of Beijing University of Aeronautics and Astronautics, 2012, 38(9): 1154-1157 (in Chinese).
[17]張海波, 王健康, 王日先, 等. 一種航空發動機多變量自抗擾解耦控制律設計[J]. 推進技術. 2012, 33(1): 78-83.
ZHANG H B, WANG J K, WANG R X, et al. Design of an active disturbance rejection decoupling multivariable control scheme for aero-engine[J]. Journal of Propulsion Technology, 2012, 33(1): 78-83 (in Chinese).
[18]任立平, 周軍. CAN總線高層協議CANaerospace及其設計應用[J]. 測控技術, 2008, 27(2): 59-61.
REN L P, ZHOU J. CANaerospace-upper layer protocol for CAN and its design application[J]. Measurement & Control Technology, 2008, 27(2): 59-61 (in Chinese).
[19]劉艷強, 郇極. CANaerospace——航空機載設備通信總線協議[J]. 測控技術, 2005, 24(2): 46-48.
LIU Y Q, HUAN J. CANaerospace—A communication specification for airborne equipments [J]. Measurement & Control Technology, 2005, 24(2): 46-48 (in Chinese).
[20]章磊, 祝明, 武哲. 無人直升機系統CAN總線應用層協議設計[J]. 北京航空航天大學學報, 2011, 37(10): 1264-1270.
ZHANG L, ZHU M, WU Z. CAN bus application layer protocol design for unmanned helicopter system [J]. Journal of Beijing University of Aeronautics and Astronautics, 2011, 37(10): 1264-1270 (in Chinese).
[21]王軍強, 呂忠民. CAN總線及其高層網絡協議在無人飛行器航空電子系統中的應用[J]. 微計算機應用, 2008, 29(11): 48-52.
WANG J Q, LU Z M. Application of Can bus and its upper layer network protocol in avionics system of unpiloted vehicle[J]. Microcomputer Applications, 2008, 29(11): 48-52 (in Chinese).
[22]CERVIN A, HENRIKSSON D, LINCOLN B, et al. How does control timing affect performance? Analysis and simulation of timing using Jitterbug and TrueTime[J]. IEEE, Control Systems Magazine, 2003, 23(3): 16-30.
[23]韓京清. 自抗擾控制技術[J]. 前沿科學, 2007, 1(1): 24-31.
HAN J Q. Auto disturbances rejection control technique [J]. Frontier Science, 2007, 1(1): 24-31 (in Chinese).
[24]李光耀, 郭迎清, 祁新杰. 航空發動機分布式控制系統原理樣機研制[J]. 計算機測量與控制, 2009, 17(5): 865-868.
LI G Y, GUO Y Q, QI X J. Construction of distributed aero-engine control system demonstrator [J]. Computer Measurement & Control, 2009, 17(5): 865-868 (in Chinese).
[25]李光耀, 郭迎清, 王海泉. 基于CAN總線的航空發動機分布式控制系統通信研究[J]. 測控技術. 2009, 28(1): 62-66.
LI G Y, GUO Y Q, WANG H Q. Communication research on CAN based distributed aero-engine control system [J]. Measurement & Control Technology, 2009, 28(1): 62-66 (in Chinese).
[26]張天宏, 牟路勇, 丁毅, 等. 基于DSP和CAN總線的發動機電子控制器核心電路模塊研究[J]. 航空動力學報, 2005, 20(1): 130-135.
ZHANG T H, MOU L Y, DING Y, et al. Study of an engine electronic controller’s core circuit module based on DSP and CAN[J]. Journal of Aerospace Power, 2005, 20(1): 130-135 (in Chinese).
[27]楊全廷, 龐景, 王雷濤, 等. 基于DSP和CAN總線的航空發動機智能位置控制器[J]. 傳感器與微系統, 2012, 31(2): 109-111.
YANG Q T, PANG J, WANG L T, et al. Aero-engine intelligent position actuator based on DSP and CAN bus[J]. Transducer and Microsystem Technologies, 2012, 31(2): 109-111 (in Chinese).
[28]THOMPSON H A, BENITEZ-PEREZ H, LEE D, et al. CANbus-based safety-critical distributed aeroengine control systems architecture demonstrator[J]. Microprocessors and Microsystems, 1999, 23(6): 345-355.
[29]BELAPURKAR R K, YEDAVALLI R K, PALUSZEWSKI P J, et al. Stability analysis of ARINC 825-based partially distributed aircraft engine control with transmission delays and packet dropouts: AIAA-2010-6675[R]. Reston: AIAA, 2010.
[30]謝振偉, 郭迎清, 陸軍. 容積與轉子狀態量在變循環發動機數值仿真中的應用[J]. 推進技術, 2015, 36(7): 1085-1092.
XIE Z W, GUO Y Q, LU J. Application of volume and rotor state values in variable cycle engine numerical simulation[J]. Journal of Propulsion Technology, 2015, 36(7): 1085-1092 (in Chinese).
[31]陸軍, 郭迎清, 陳小磊. 線性擬合法建立航空發動機狀態變量模型[J]. 航空動力學報, 2011, 26(5): 1172-1177.
LU J, GUO Y Q, CHEN X L. Establishment of aero-engine state variable model based on linear fitting method[J]. Journal of Aerospace Power, 2011, 26(5): 1172-1177 (in Chinese).
謝振偉男, 博士研究生。主要研究方向: 變循環發動機建模與分布式控制。
Tel: 029-88431121
E-mail: xzw2008200916@mail.nwpu.edu.cn
郭迎清男, 博士, 教授, 博士生導師。主要研究方向: 航空發動機控制與健康管理。
Tel: 029-88431121
E-mail: yqguo@nwpu.edu.cn
姜彩虹女, 博士, 研究員。主要研究方向: 航空發動機控制與健康管理。
E-mail: henry.lucent@163.com
田飛龍男, 碩士研究生。主要研究方向: 航空發動機分布式控制。
E-mail: tianfeilong0@mail.nwpu.edu.cn
李睿超男, 博士研究生。主要研究方向: 航空發動機分布式控制。
E-mail: herohere@mail.nwpu.edu.cn
Fully distributed control of variable cycle engine
XIE Zhenwei1, GUO Yingqing1,*, JIANG Caihong2, TIAN Feilong1, LI Ruichao1
1. School of Power and Energy, Northwestern Polytechnical University, Xi’an710129, China 2. Shenyang Aeroengine Design and Research Institute, Aero-Engine Corporation of China, Shenyang110015, China
Adopting distributed control architecture can reduce the weight of the variable cycle engine control and conducive to the development and expansion of the system. A fully distributed control architecture is proposed. The calculations of control algorithm are completely distributed to the smart actuators. And the parameter values required for the calculation are sent to the smart actuator by smart sensors through a serial data bus. The main work of developing fully distributed control for variable cycle engine is to design decentralized control algorithm and the bus communication program. The coupling of control loops is considered part of the total disturbance. Through estimating the total disturbance and cancelling it in the control signal by linear active disturbance rejection controller (ADRC), decentralized control is realized. Based on the CAN bus hardware, a time triggered bus communication program is designed using the CANaerospace higher layer protocol. Thus the fully distributed control system of variable cycle engine is realized. A simulation system is built in the MATLAB/Simulink environment with TrueTime toolbox. TrueTime Kernel modules are used to simulate computing units of smart actuators and smart sensors. TrueTime Network module is used to simulate CAN bus. The linear ADRC and CANaerospace protocol are written to the computing unit. The simulation results show that the established variable cycle engine fully distributed control system could adapt to a wide range of intake status and changes in health status of the engine and has strong robustness.
variable cycle engine; fully distributed control; linear active disturbance rejection control; decentralized control; CANaerospace protocol
2015-04-17; Revised: 2015-05-12; Accepted: 2015-12-29; Published online: 2016-01-2611:49
s: Advanced Aeroengine Technology Research Program; Project Funded by Science and Technology on Scramjet Laboratory
. Tel.: 029-88431121E-mail: yqguo@nwpu.edu.cn
2015-04-17; 退修日期: 2015-05-12; 錄用日期: 2015-12-29;
時間: 2016-01-2611:49
www.cnki.net/kcms/detail/11.1929.V.20160126.1149.002.html
國家先進航空發動機技術研究計劃; 高超聲速沖壓發動機技術重點實驗室技術資助項目
.Tel.: 029-88431121E-mail: yqguo@nwpu.edu.cn
10.7527/S1000-6893.2015.0361
V231
A
1000-6893(2016)06-1809-10
引用格式: 謝振偉, 郭迎清, 姜彩虹, 等. 變循環發動機完全分布式控制[J]. 航空學報, 2016, 37(6): 1809-1818. XIE Z W, GUO Y Q, JIANG C H, et al. Fully distributed control of variable cycle engine[J]. Acta Aeronautica et Astronautica Sinica, 2016, 37(6): 1809-1818.
http://hkxb.buaa.edu.cnhkxb@buaa.edu.cn
URL: www.cnki.net/kcms/detail/11.1929.V.20160126.1149.002.html
猜你喜歡
汽車維修與保養(2021年8期)2021-02-16 00:28:30
汽車維修與保養(2021年8期)2021-02-16 00:28:18
汽車維修與保養(2020年11期)2020-06-09 05:42:06
民用飛機設計與研究(2019年2期)2019-08-05 01:33:40
汽車維護與修理(2016年3期)2016-02-28 13:16:54
汽車維修與保養(2015年1期)2015-04-17 03:25:30
汽車與新動力(2015年1期)2015-02-27 12:11:01
汽車與新動力(2014年6期)2014-02-27 12:10:49
汽車與新動力(2014年5期)2014-02-27 12:10:41
汽車與新動力(2014年2期)2014-02-27 12:10:15